Y-BotFrame: An Extensible Embodied Agent Framework for Quadruped Robot Assistants
Pith reviewed 2026-06-27 06:22 UTC · model grok-4.3
The pith
Quadruped robots execute natural language instructions through an extensible framework that fuses multimodal sensors with a language model core.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
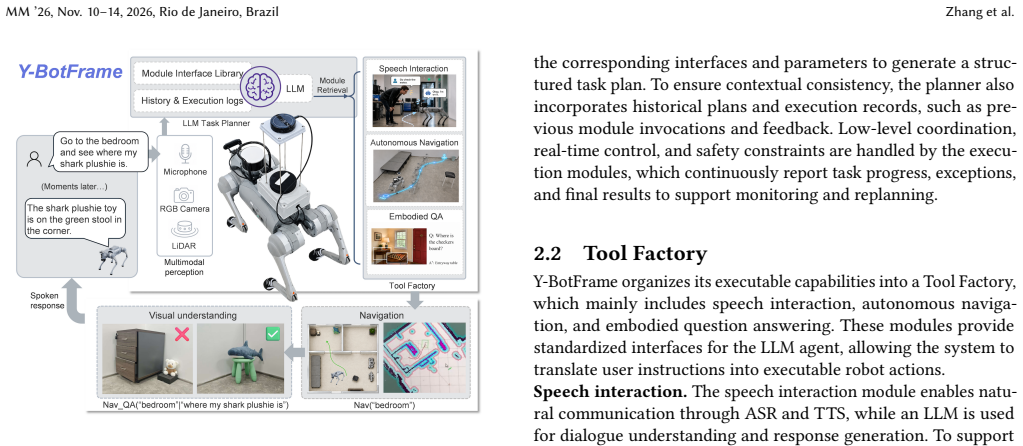
Y-BotFrame integrates multimodal perception capabilities, including speech, vision, and LiDAR, and employs a large language model as the cognitive core for environmental understanding, contextual reasoning, and task planning. The system maps user natural-language instructions into executable embodied task units that can be carried out by the robot, supports natural interaction through voice commands and visual feedback, and provides a highly extensible architecture for plug-and-play integration of new functional modules.
What carries the argument
Extensible embodied framework with large language model as cognitive core that converts natural-language instructions into robot-executable task units.
If this is right
- Users can issue voice commands and receive visual confirmation, enabling controller-free collaboration.
- New perception or planning modules can be added in plug-and-play fashion for ongoing upgrades.
- The same architecture supplies a concrete reference for deploying instruction-driven agents on other mobile platforms.
- Robots gain the ability to traverse complex terrain while responding to high-level spoken goals.
Where Pith is reading between the lines
- The same sensor-to-LLM pipeline might transfer to wheeled or aerial robots if the task unit format is kept consistent.
- Real deployments would likely need separate verification layers to catch unsafe plans the language model produces.
- Longer-term testing across varied lighting, weather, and terrain types would expose where current perception modules break.
Load-bearing premise
An off-the-shelf large language model can reliably turn natural language commands into safe physical actions for a quadruped robot operating without extra safety checks in unstructured settings.
What would settle it
A recorded trial in which the robot misinterprets a spoken instruction and performs an unsafe movement in an unprepared outdoor space would show the mapping step does not hold.
Figures
read the original abstract
Quadruped robots are capable of traversing a wide range of complex terrains with high flexibility. As highly mobile ground-based intelligent platforms, they can be equipped with modules for navigation control, environmental perception, and intelligent interaction, thereby serving as real-world mobile deployment platforms for various algorithms. In this paper, we introduce Y-BotFrame, an extensible embodied platform that turns a robot into an intelligent ground assistant. Y-BotFrame integrates multimodal perception capabilities, including speech, vision, and LiDAR, and employs a large language model as the cognitive core for environmental understanding, contextual reasoning, and task planning. The system maps user natural-language instructions into executable embodied task units that can be carried out by the robot. Y-BotFrame supports natural interaction through voice commands and visual feedback, removing the need for a remote controller and enabling efficient human-robot collaboration. With a highly extensible framework, Y-BotFrame supports plug-and-play integration of new functional modules as well as modular upgrades and iterative development, offering a reference implementation for the real-world deployment of general-purpose, instruction-driven embodied agents.The supplementary video is available at https://xdei-group.github.io/Y-BotFrame/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Y-BotFrame, an extensible embodied platform for quadruped robot assistants. It integrates multimodal perception (speech, vision, LiDAR) with a large language model serving as the cognitive core for environmental understanding, contextual reasoning, and task planning. The framework maps natural-language user instructions into executable embodied task units, supports voice-based interaction with visual feedback, eliminates the need for remote controllers, and enables plug-and-play addition of functional modules.
Significance. If the described integration and mapping were shown to function reliably, the work would offer a practical reference implementation for instruction-driven embodied agents on physical mobile platforms, highlighting extensibility for real-world deployment and human-robot collaboration.
major comments (2)
- [Abstract] Abstract: The central claim that the system 'maps user natural-language instructions into executable embodied task units that can be carried out by the robot' is asserted without any quantitative results, success rates, failure cases, ablation studies, or baseline comparisons, rendering the functionality unverifiable from the provided description.
- [Abstract] Abstract and system overview: No description or diagram is supplied of parsing, validation, or safety layers between LLM-generated plans and low-level robot commands; this omission directly undermines the reliability of the claimed mapping in unstructured environments.
minor comments (1)
- The supplementary video link is given but the manuscript would benefit from explicit architecture diagrams or pseudocode illustrating the LLM-to-task-unit pipeline.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for clearer claims and safety considerations in the abstract and system overview. We respond point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the system 'maps user natural-language instructions into executable embodied task units that can be carried out by the robot' is asserted without any quantitative results, success rates, failure cases, ablation studies, or baseline comparisons, rendering the functionality unverifiable from the provided description.
Authors: We agree that the abstract asserts the mapping capability without quantitative evaluation, success rates, ablations, or baselines. The manuscript is a system paper describing the framework architecture, multimodal integration, and extensibility rather than an empirical evaluation study. Validation is provided via the supplementary video showing real-robot operation. We will revise the abstract to more accurately describe the framework's design intent and note the demonstration-based evidence, avoiding overstatement of verified performance. revision: yes
-
Referee: [Abstract] Abstract and system overview: No description or diagram is supplied of parsing, validation, or safety layers between LLM-generated plans and low-level robot commands; this omission directly undermines the reliability of the claimed mapping in unstructured environments.
Authors: We acknowledge that the current manuscript provides no description or diagram of parsing, validation, or safety layers between LLM-generated plans and low-level commands. This is a substantive omission for claims about reliable mapping. In revision we will add a dedicated subsection and accompanying diagram detailing the interface, including plan parsing into task units, validation steps, and any safety mechanisms such as command constraints or fallback behaviors. revision: yes
Circularity Check
No circularity: systems integration paper with no derivations or fitted predictions
full rationale
The paper is a descriptive systems framework for robot integration (multimodal perception + LLM core). No equations, no parameter fitting, no predictions of derived quantities, and no self-citation chains appear in the provided text or abstract. The central claim is an engineering assertion of integration and mapping capability rather than a mathematical derivation that could reduce to its inputs. This matches the default expectation of no circularity for non-derivational work.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Patricia S. Abril and Robert Plant. The patent holder's dilemma: Buy, sell, or troll?. Communications of the ACM. doi:10.1145/1188913.1188915
-
[2]
Deciding equivalances among conjunctive aggregate queries
Sarah Cohen and Werner Nutt and Yehoshua Sagic. Deciding equivalances among conjunctive aggregate queries. doi:10.1145/1219092.1219093
-
[3]
Special issue: Digital Libraries. 1996
1996
-
[4]
Understanding Policy-Based Networking
David Kosiur. Understanding Policy-Based Networking
-
[7]
The title of book two. doi:10.1007/3-540-09237-4
-
[8]
Asad Z. Spector. Achieving application requirements. Distributed Systems. doi:10.1145/90417.90738
-
[9]
Douglass and David Harel and Mark B
Bruce P. Douglass and David Harel and Mark B. Trakhtenbrot. Statecarts in use: structured analysis and object-orientation. Lectures on Embedded Systems. doi:10.1007/3-540-65193-4_29
-
[10]
Donald E. Knuth. The Art of Computer Programming, Vol. 1: Fundamental Algorithms (3rd. ed.)
-
[11]
Donald E. Knuth. The Art of Computer Programming
-
[12]
Structured Variational Inference Procedures and their Realizations (as incol)
Dan Geiger and Christopher Meek. Structured Variational Inference Procedures and their Realizations (as incol). Proceedings of Tenth International Workshop on Artificial Intelligence and Statistics, The Barbados
-
[13]
Stan W. Smith. An experiment in bibliographic mark-up: Parsing metadata for XML export. Proceedings of the 3rd. annual workshop on Librarians and Computers
-
[14]
Catch me, if you can: Evading network signatures with web-based polymorphic worms
Matthew Van Gundy and Davide Balzarotti and Giovanni Vigna. Catch me, if you can: Evading network signatures with web-based polymorphic worms. Proceedings of the first USENIX workshop on Offensive Technologies
-
[15]
Sten Andler. Predicate Path expressions. Proceedings of the 6th. ACM SIGACT-SIGPLAN symposium on Principles of Programming Languages. doi:10.1145/567752.567774
-
[16]
LOGICS of Programs: AXIOMATICS and DESCRIPTIVE POWER
David Harel. LOGICS of Programs: AXIOMATICS and DESCRIPTIVE POWER
-
[17]
Anisi , title =
David A. Anisi , title =
-
[18]
Clarkson
Kenneth L. Clarkson. Algorithms for Closest-Point Problems (Computational Geometry)
-
[19]
Introduction to Bayesian Statistics
Harry Thornburg. Introduction to Bayesian Statistics. 2001
2001
-
[20]
CLIFFORD: a Maple 11 Package for Clifford Algebra Computations, version 11
Rafal Ablamowicz and Bertfried Fauser. CLIFFORD: a Maple 11 Package for Clifford Algebra Computations, version 11. 2007
2007
-
[21]
Stats and Analysis
Poker-Edge.Com. Stats and Analysis. 2006
2006
-
[22]
A more perfect union
Barack Obama. A more perfect union
-
[23]
The fountain of youth
Joseph Scientist. The fountain of youth
-
[24]
Solder man
Dave Novak. Solder man. ACM SIGGRAPH 2003 Video Review on Animation theater Program: Part I - Vol. 145 (July 27--27, 2003). doi:10.945/woot07-S422
2003
-
[25]
Interview with Bill Kinder: January 13, 2005
Newton Lee. Interview with Bill Kinder: January 13, 2005. Comput. Entertain. doi:10.1145/1057270.1057278
-
[26]
The Enabling of Digital Libraries
Bernard Rous. The Enabling of Digital Libraries. Digital Libraries
-
[28]
(new) Finding minimum congestion spanning trees , journal =
Werneck, Renato and Setubal, Jo\. (new) Finding minimum congestion spanning trees , journal =. doi:10.1145/351827.384253 , acmid = 384253, publisher =
-
[30]
Conti, Mauro and Di Pietro, Roberto and Mancini, Luigi V. and Mei, Alessandro , title =. Inf. Fusion , volume =. 2009 , issn =. doi:10.1016/j.inffus.2009.01.002 , acmid =
-
[31]
Li, Cheng-Lun and Buyuktur, Ayse G. and Hutchful, David K. and Sant, Natasha B. and Nainwal, Satyendra K. , title =. CHI '08 extended abstracts on Human factors in computing systems , year =. doi:10.1145/1358628.1358946 , acmid =
-
[32]
, title =
Hollis, Billy S. , title =. 1999 , isbn =
1999
-
[33]
Goossens, Michel and Rahtz, S. P. and Moore, Ross and Sutor, Robert S. , title =. 1999 , isbn =
1999
-
[34]
and Rosenberg, Arnold L
Buss, Jonathan F. and Rosenberg, Arnold L. and Knott, Judson D. , title =. 1987 , source =
1987
-
[35]
CHI '08: CHI '08 extended abstracts on Human factors in computing systems , year =
, note =. CHI '08: CHI '08 extended abstracts on Human factors in computing systems , year =
-
[36]
Algorithms for Closest-Point Problems (Computational Geometry) , year =
Clarkson, Kenneth Lee , advisor =. Algorithms for Closest-Point Problems (Computational Geometry) , year =
-
[37]
SIGCOMM Comput. Commun. Rev. , year =
-
[38]
IEEE TCSC Executive Committee , booktitle =. 2004 , isbn =. doi:http://dx.doi.org/10.1109/ICWS.2004.64 , acmid =
-
[39]
Distributed systems (2nd Ed.) , year =
-
[40]
, title =
Petrie, Charles J. , title =. 1986 , source =
1986
-
[41]
Donald E. Knuth. Seminumerical Algorithms. 1981
1981
-
[42]
E-commerce and cultural values , year =
Kong, Wei-Chang , Title =. E-commerce and cultural values , year =
-
[43]
E-commerce and cultural values , year =
Kong, Wei-Chang , type =. E-commerce and cultural values , year =
-
[44]
Chapter 9 , booktitle =
Kong, Wei-Chang , editor =. Chapter 9 , booktitle =
-
[45]
E-commerce and cultural values , editor =
Kong, Wei-Chang , title =. E-commerce and cultural values , editor =. 2003 , isbn =
2003
-
[46]
E-commerce and cultural values - (InBook-num-in-chap) , chapter =
Kong, Wei-Chang , editor =. E-commerce and cultural values - (InBook-num-in-chap) , chapter =. 2004 , address =
2004
-
[47]
E-commerce and cultural values (Inbook-text-in-chap) , chapter =
Kong, Wei-Chang , editor =. E-commerce and cultural values (Inbook-text-in-chap) , chapter =. 2005 , address =
2005
-
[48]
E-commerce and cultural values (Inbook-num chap) , chapter =
Kong, Wei-Chang , editor =. E-commerce and cultural values (Inbook-num chap) , chapter =. 2006 , address =
2006
-
[49]
Microelectron
Mehdi Saeedi and Morteza Saheb Zamani and Mehdi Sedighi , title =. Microelectron. J. , volume =. 2010 , pages =
2010
-
[50]
Mehdi Saeedi and Morteza Saheb Zamani and Mehdi Sedighi and Zahra Sasanian , title =. J. Emerg. Technol. Comput. Syst. , volume =
-
[51]
Kirschmer, Markus and Voight, John , title =. SIAM J. Comput. , issue_date =. 2010 , issn =. doi:https://doi.org/10.1137/080734467 , acmid =
-
[52]
Hoare, C. A. R. , title =. Structured programming (incoll) , editor =. 1972 , isbn =
1972
-
[53]
History of programming languages I (incoll) , editor =
Lee, Jan , title =. History of programming languages I (incoll) , editor =. 1981 , isbn =. doi:http://doi.acm.org/10.1145/800025.1198348 , acmid =
-
[54]
, title =
Dijkstra, E. , title =. Classics in software engineering (incoll) , year =
-
[55]
Wenzel, Elizabeth M. , title =. Multimedia interface design (incoll) , year =. doi:10.1145/146022.146089 , acmid =
-
[56]
, title =
Mumford, E. , title =. Critical issues in information systems research (incoll) , year =
-
[57]
and Golden, Donald G
McCracken, Daniel D. and Golden, Donald G. , title =. 1990 , isbn =
1990
-
[58]
The analysis of linear partial differential operators
H. The analysis of linear partial differential operators. 1985 , PAGES =
1985
-
[59]
IEEE", address =
A. Adya and P. Bahl and J. Padhye and A.Wolman and L. Zhou , title =. Proceedings of the IEEE 1st International Conference on Broadnets Networks (BroadNets'04) , publisher = "IEEE", address = "Los Alamitos, CA", year =
-
[60]
I. F. Akyildiz and W. Su and Y. Sankarasubramaniam and E. Cayirci , title =. Comm. ACM , volume = 38, number = "4", year =
-
[61]
I. F. Akyildiz and T. Melodia and K. R. Chowdhury , title =. Computer Netw. , volume = 51, number = "4", year =
-
[62]
ACM", address =
P. Bahl and R. Chancre and J. Dungeon , title =. Proceeding of the 10th International Conference on Mobile Computing and Networking (MobiCom'04) , publisher = "ACM", address = "New York, NY", year =
-
[63]
8 (Special Issue on Sensor Networks)
D. Culler and D. Estrin and M. Srivastava , title =. IEEE Comput. , volume = 37, number = "8 (Special Issue on Sensor Networks)", publisher = "IEEE", address = "Los Alamitos, CA", year =
-
[64]
Natarajan and M
A. Natarajan and M. Motani and B. de Silva and K. Yap and K. C. Chua , title =. Network Architectures , editor =. 960935712
-
[65]
Tzamaloukas and J
A. Tzamaloukas and J. J. Garcia-Luna-Aceves , title =
-
[66]
Zhou and J
G. Zhou and J. Lu and C.-Y. Wan and M. D. Yarvis and J. A. Stankovic , title =
-
[67]
Mapping Powerlists onto Hypercubes
Jacob Kornerup. Mapping Powerlists onto Hypercubes. 1994
1994
-
[68]
Automatic Parallelization for Distributed-Memory Multiprocessing Systems
Michael Gerndt. Automatic Parallelization for Distributed-Memory Multiprocessing Systems
-
[69]
J. E. Archer, Jr. and R. Conway and F. B. Schneider. User recovery and reversal in interactive systems. ACM Trans. Program. Lang. Syst
-
[70]
D. D. Dunlop and V. R. Basili. Generalizing specifications for uniformly implemented loops. ACM Trans. Program. Lang. Syst
-
[71]
Heering and P
J. Heering and P. Klint. Towards monolingual programming environments. ACM Trans. Program. Lang. Syst
-
[72]
Donald E. Knuth. The book
-
[73]
Korach and D
E. Korach and D. Rotem and N. Santoro. Distributed algorithms for finding centers and medians in networks. ACM Trans. Program. Lang. Syst
-
[74]
: A Document Preparation System
Leslie Lamport. : A Document Preparation System
-
[75]
F. Nielson. Program transformations in a denotational setting. ACM Trans. Program. Lang. Syst
-
[76]
arXiv preprint arXiv:2511.21631 , year=
Qwen3-vl technical report , author=. arXiv preprint arXiv:2511.21631 , year=
-
[77]
Science Robotics , volume=
Anymal parkour: Learning agile navigation for quadrupedal robots , author=. Science Robotics , volume=. 2024 , publisher=
2024
-
[78]
5th Annual Conference on Robot Learning , year=
Visual-locomotion: Learning to walk on complex terrains with vision , author=. 5th Annual Conference on Robot Learning , year=
-
[79]
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Moe-loco: Mixture of experts for multitask locomotion , author=. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2025 , organization=
2025
-
[80]
European Conference on Computer Vision , pages=
Quar-vla: Vision-language-action model for quadruped robots , author=. European Conference on Computer Vision , pages=. 2024 , organization=
2024
-
[81]
Science China Information Sciences , volume=
The rise and potential of large language model based agents: A survey , author=. Science China Information Sciences , volume=. 2025 , publisher=
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.