CARVE-Q: Quantum-Proposed, Classically Certified Interactive Driving Repair
Pith reviewed 2026-06-28 06:27 UTC · model grok-4.3
The pith
CARVE-Q uses quantum minimum finding on a product repair lattice while classical verification preserves certificate soundness and right-of-way rules.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
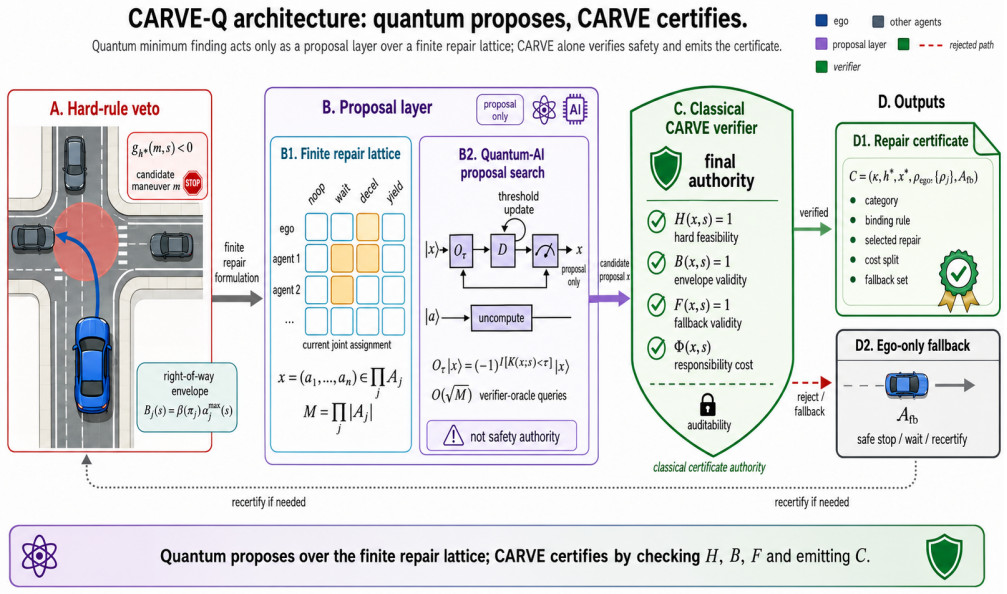
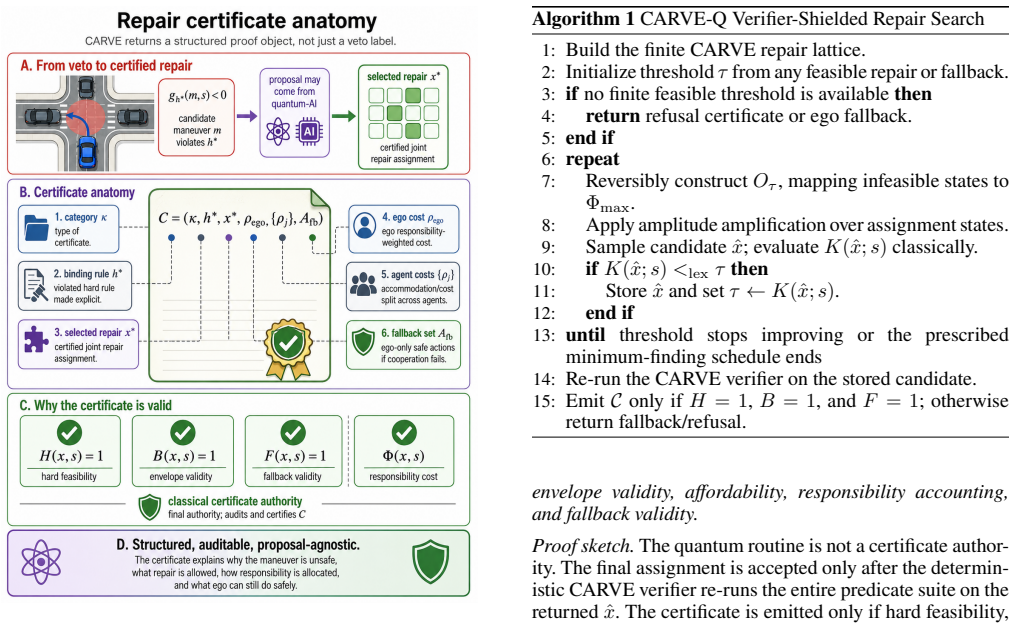
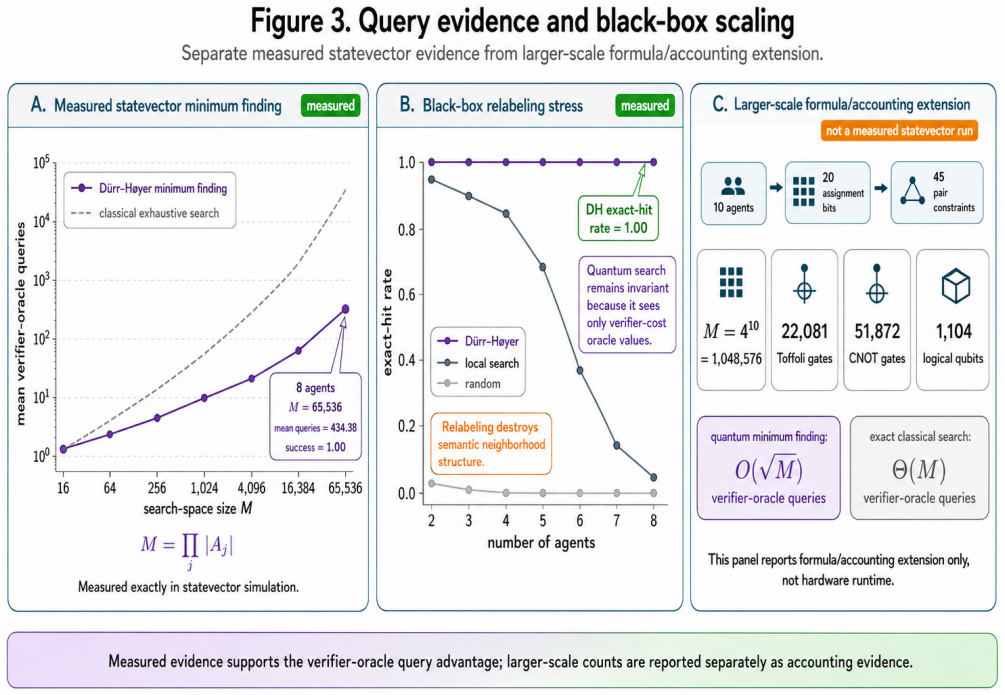
Given a vetoed maneuver, the product lattice M equals the cartesian product of per-agent action sets. A reversible black-box oracle for M permits Durr-Hoyer minimum finding in O(sqrt(M)) queries with high probability, whereas classical search requires Theta(M) queries in the worst case. The quantum proposal is then passed to a classical verifier that emits a certificate recording the binding rule, selected joint repair, right-of-way-scaled envelope, responsibility-weighted cost split, and ego-only fallback, without ever receiving or using priority data.
What carries the argument
The product repair lattice M = prod_j |A_j| equipped with a finite-precision reversible black-box oracle that supports quantum minimum finding under classical verifier shielding.
If this is right
- Quantum proposals scale to interaction spaces whose size would make classical exhaustive search infeasible while verification cost remains independent of lattice size.
- Certificates always encode explicit right-of-way authority and responsibility allocation regardless of how the candidate was proposed.
- Priority information is never required at any stage, so the architecture works in settings where agents withhold or cannot compute priorities.
- Finite-precision reversible oracles suffice, removing the need for exact infinite-precision arithmetic in the quantum layer.
Where Pith is reading between the lines
- The same verifier-shielded pattern could be applied to other multi-agent veto problems such as resource allocation or scheduling where a product lattice arises naturally.
- Near-term quantum devices might host the oracle and minimum-finding step if the finite-precision reversible construction can be realized with modest qubit counts.
- The separation of proposal generation from certification authority suggests a template for hybrid quantum-classical autonomy stacks that keep safety rules entirely classical.
Load-bearing premise
A finite-precision reversible black-box oracle for the product repair lattice can be built so that the quantum minimum-finding output is always a candidate that classical verification can certify for soundness and right-of-way authority.
What would settle it
A single run on the INTERACTION replay dataset in which the quantum minimum-finding candidate produces a certificate that violates right-of-way respect or generates a nonzero priority false positive.
Figures
read the original abstract
The critical question after a correct driving veto is not only whether a maneuver is unsafe, but whether the blocked interaction admits a lawful, auditable, and responsibility-bounded repair. Prediction and game-theoretic planners can suggest plausible cooperation, yet they do not return a proof that the repair respects hard rules, right-of-way, cost allocation, and ego fallback. We introduce CARVE, Certified Affordable Repair of Vetoed maneuvers via Envelopes, a certificate architecture for prediction-free interactive repair. Given a vetoed maneuver, CARVE constructs a finite repair lattice and emits a structured certificate recording the binding rule, selected joint repair, right-of-way-scaled cooperation envelope, responsibility-weighted cost split, and ego-only fallback. This certificate view reveals the algorithmic bottleneck: multi-owner repair induces a product lattice $M = \prod_j |\mathcal{A}_j|$. We therefore introduce CARVE-Q, a verifier-shielded quantum-AI search layer that applies quantum minimum finding only to this black-box lattice while leaving all safety authority classical. In the conservative verifier-oracle model, exact classical minimum finding requires $\Theta(M)$ queries in the worst case, whereas Durr-Hoyer/Grover minimum finding uses $O(\sqrt{M})$ oracle queries with high probability. We prove verifier-shielded certificate soundness, priority non-elicitation, black-box query separation, and finite-precision reversible-oracle constructibility. We then demonstrate state-vector minimum finding on CARVE repair oracles up to 65,536 assignments and validate certificate preservation on Lanelet2-grounded INTERACTION replay with 100% right-of-way respect, 100% blame consistency, and zero priority false positives. The result is a trust-bounded quantum-AI pattern for certified autonomy: quantum proposes; CARVE certifies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces CARVE, a certificate architecture for prediction-free interactive repair of vetoed driving maneuvers that constructs a finite repair lattice and emits structured certificates recording binding rules, joint repairs, right-of-way envelopes, responsibility-weighted costs, and ego fallbacks. It extends this with CARVE-Q, a verifier-shielded quantum-AI layer applying Durr-Hoyer quantum minimum finding to the black-box product lattice M = prod_j |A_j| for O(sqrt(M)) oracle queries versus classical Theta(M). The manuscript claims formal proofs of verifier-shielded certificate soundness, priority non-elicitation, black-box query separation, and finite-precision reversible-oracle constructibility, followed by demonstrations of state-vector minimum finding on lattices up to 65,536 assignments and validation on Lanelet2-grounded INTERACTION replay achieving 100% right-of-way respect, 100% blame consistency, and zero priority false positives.
Significance. If the claimed proofs and oracle construction are rigorous, the work provides a concrete hybrid quantum-classical pattern for certified autonomy that separates quantum proposal from classical safety verification, addressing the multi-owner repair bottleneck without eliciting priorities or relying on prediction. Credit is given for grounding the query separation in the standard Durr-Hoyer result (parameter-free) and for attempting empirical validation on real replay data; this could be a useful template for trust-bounded quantum-AI in safety-critical domains if the finite-precision reversible oracle is shown to be constructible without leaking authority information.
major comments (2)
- [Abstract and CARVE-Q section] Abstract (and sections describing CARVE-Q and the oracle model): the central claim of finite-precision reversible black-box oracle constructibility for the product lattice M is load-bearing for the query separation and soundness results, yet the provided text supplies no explicit construction details, reversible circuit, or finite-precision encoding that would allow verification that classical post-processing preserves non-elicitation and right-of-way authority.
- [Abstract] Abstract: the assertions of 'we prove verifier-shielded certificate soundness' and '100% right-of-way respect, 100% blame consistency' on INTERACTION replay are presented without any derivation, lemma statement, or data table; this prevents checking whether the classical verifier step actually shields the quantum minimum-finding output from priority information.
minor comments (2)
- [CARVE section] Notation for the product lattice M = prod_j |A_j| is introduced without an accompanying equation number or explicit definition of the action sets A_j; add a numbered display equation in the CARVE section.
- [Empirical validation section] The validation metrics are stated as 100% without reporting the number of scenarios, the exact Lanelet2/INTERACTION subset size, or any failure cases; include a table or appendix with these counts.
Simulated Author's Rebuttal
We thank the referee for the thorough review and for recognizing the potential of the hybrid quantum-classical pattern. We address the two major comments below. Both points identify areas where the manuscript can be strengthened for clarity and verifiability without altering the core claims.
read point-by-point responses
-
Referee: [Abstract and CARVE-Q section] Abstract (and sections describing CARVE-Q and the oracle model): the central claim of finite-precision reversible black-box oracle constructibility for the product lattice M is load-bearing for the query separation and soundness results, yet the provided text supplies no explicit construction details, reversible circuit, or finite-precision encoding that would allow verification that classical post-processing preserves non-elicitation and right-of-way authority.
Authors: We agree the explicit construction details are insufficiently elaborated for independent verification. Section 4.3 sketches the reversible-oracle model and finite-precision encoding that keeps the oracle black-box and authority-preserving, but a full circuit diagram and step-by-step encoding are not supplied. We will add an appendix containing the reversible circuit, the finite-precision representation of the product lattice, and a short argument confirming that classical post-processing cannot extract priority information. This addition will be included in the revised manuscript. revision: yes
-
Referee: [Abstract] Abstract: the assertions of 'we prove verifier-shielded certificate soundness' and '100% right-of-way respect, 100% blame consistency' on INTERACTION replay are presented without any derivation, lemma statement, or data table; this prevents checking whether the classical verifier step actually shields the quantum minimum-finding output from priority information.
Authors: The abstract is a high-level summary; the lemmas establishing verifier-shielded soundness and priority non-elicitation appear in Section 3, while the 100% metrics and supporting tables are reported in Section 5 (Table 3 and the associated replay figures). To improve traceability from the abstract, we will insert parenthetical references to the relevant lemmas and data table in the revised abstract and introduction. The classical verifier step is shown in the proofs to operate only on the emitted certificate, independent of the quantum search path. revision: partial
Circularity Check
No significant circularity detected
full rationale
The paper invokes the standard external Durr-Hoyer/Grover result for the O(sqrt(M)) query bound and claims independent formal proofs for verifier-shielded soundness, non-elicitation, black-box separation, and finite-precision oracle constructibility. These proofs are not shown to reduce to fitted parameters, self-citations, or definitional equivalences in the abstract or described claims. The lattice-size demonstrations function as empirical validation of the claimed constructibility rather than a circular renaming or prediction. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Durr-Hoyer quantum minimum finding achieves O(sqrt(M)) queries for unstructured search
- domain assumption Interactive driving repairs can be represented as a finite discrete product lattice of per-agent action sets
invented entities (2)
-
CARVE certificate
no independent evidence
-
verifier-shielded quantum-AI search layer
no independent evidence
Reference graph
Works this paper leans on
-
[1]
, title =
Grover, Lov K. , title =. Proceedings of the Twenty-Eighth Annual ACM Symposium on Theory of Computing , pages =. 1996 , publisher =
1996
-
[2]
arXiv preprint quant-ph/9607014 , year =
Durr, Christoph and Hoyer, Peter , title =. arXiv preprint quant-ph/9607014 , year =
-
[3]
and Bernstein, Ethan and Brassard, Gilles and Vazirani, Umesh , title =
Bennett, Charles H. and Bernstein, Ethan and Brassard, Gilles and Vazirani, Umesh , title =. SIAM Journal on Computing , volume =
-
[4]
Fortschritte der Physik , volume =
Boyer, Michel and Brassard, Gilles and Hoyer, Peter and Tapp, Alain , title =. Fortschritte der Physik , volume =
-
[5]
Contemporary Mathematics , volume =
Brassard, Gilles and Hoyer, Peter and Mosca, Michele and Tapp, Alain , title =. Contemporary Mathematics , volume =
-
[6]
and Chuang, Isaac L
Nielsen, Michael A. and Chuang, Isaac L. , title =
-
[7]
arXiv preprint arXiv:1411.4028 , year =
Farhi, Edward and Goldstone, Jeffrey and Gutmann, Sam , title =. arXiv preprint arXiv:1411.4028 , year =
-
[8]
Quantum , volume =
Preskill, John , title =. Quantum , volume =
-
[9]
and Arrasmith, A
Cerezo, M. and Arrasmith, A. and Babbush, R. and Benjamin, S. C. and Endo, S. and Fujii, K. and McClean, J. R. and Mitarai, K. and Yuan, X. and Cincio, L. and Coles, P. J. , title =. Nature Reviews Physics , volume =
-
[10]
and Boixo, Sergio and Smelyanskiy, Vadim N
McClean, Jarrod R. and Boixo, Sergio and Smelyanskiy, Vadim N. and Babbush, Ryan and Neven, Hartmut , title =. Nature Communications , volume =
-
[11]
Nature , volume =
Biamonte, Jacob and Wittek, Peter and Pancotti, Nicola and Rebentrost, Patrick and Wiebe, Nathan and Lloyd, Seth , title =. Nature , volume =
-
[12]
Physical Review Letters , volume =
Schuld, Maria and Killoran, Nathan , title =. Physical Review Letters , volume =
-
[13]
and Temme, Kristan and Harrow, Aram W
Havlicek, Vojtech and Corcoles, Antonio D. and Temme, Kristan and Harrow, Aram W. and Kandala, Abhinav and Chow, Jerry M. and Gambetta, Jay M. , title =. Nature , volume =
-
[14]
and Yoo, Jae Hyeon and Isakov, Sergei V
Broughton, Michael and Verdon, Guillaume and McCourt, Trevor and Martinez, Antonio J. and Yoo, Jae Hyeon and Isakov, Sergei V. and Massey, Philip and Niu, Murphy Yuezhen and Halavati, Ramin and Peters, Evan and Lockwood, Owen and Skolik, Andrea and Jerbi, Sofiene and Dunjko, Vedran and Leib, Martin and Streif, Michael and Von Dollen, David and Chen, Hongx...
arXiv 2003
-
[15]
and Briegel, Hans J
Jerbi, Sofiene and Gyurik, Casper and Marshall, Simon C. and Briegel, Hans J. and Dunjko, Vedran , title =. Advances in Neural Information Processing Systems , volume =
-
[16]
arXiv preprint arXiv:1910.03088 , year =
Zhan, Wei and Sun, Liting and Wang, Di and Shi, Hao and Clausse, Aubrey and Naumann, Maximilian and Kummerle, Julius and Konigshof, Hendrik and Stiller, Christoph and de La Fortelle, Arnaud and Tomizuka, Masayoshi , title =. arXiv preprint arXiv:1910.03088 , year =
arXiv 1910
-
[17]
Proceedings of the IEEE International Conference on Intelligent Transportation Systems , pages =
Poggenhans, Fabian and Pauls, Jan-Hendrik and Janosovits, Johannes and Orf, Stefan and Naumann, Maximilian and Kuhnt, Florian and Mayr, Matthias , title =. Proceedings of the IEEE International Conference on Intelligent Transportation Systems , pages =
-
[18]
arXiv preprint arXiv:1708.06374 , year =
Shalev-Shwartz, Shai and Shammah, Shaked and Shashua, Amnon , title =. arXiv preprint arXiv:1708.06374 , year =
-
[19]
and Pendleton, Scott and Fu, Jingnan and Frazzoli, Emilio , title =
Censi, Andrea and Slutsky, Konstantin and Wongpiromsarn, Tichakorn and Yershov, Dmitry S. and Pendleton, Scott and Fu, Jingnan and Frazzoli, Emilio , title =. Proceedings of the IEEE International Conference on Robotics and Automation , pages =
-
[20]
Proceedings of the AAAI Conference on Artificial Intelligence , year =
Alshiekh, Mohammed and Bloem, Roderick and Ehlers, Ruediger and Koenighofer, Bettina and Niekum, Scott and Topcu, Ufuk , title =. Proceedings of the AAAI Conference on Artificial Intelligence , year =
-
[21]
Journal of Machine Learning Research , volume =
Garcia, Javier and Fernandez, Fernando , title =. Journal of Machine Learning Research , volume =
-
[22]
and Sastry, S
Sadigh, Dorsa and Dragan, Anca D. and Sastry, S. Shankar and Seshia, Sanjit A. , title =. Proceedings of Robotics: Science and Systems , year =
-
[23]
Proceedings of the National Academy of Sciences , volume =
Schwarting, Wilko and Pierson, Alyssa and Alonso-Mora, Javier and Karaman, Sertac and Rus, Daniela , title =. Proceedings of the National Academy of Sciences , volume =
-
[24]
Proceedings of the IEEE International Conference on Robotics and Automation , pages =
Kuderer, Markus and Gulati, Shilpa and Burgard, Wolfram , title =. Proceedings of the IEEE International Conference on Robotics and Automation , pages =
-
[25]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages =
Alahi, Alexandre and Goel, Kratarth and Ramanathan, Vignesh and Robicquet, Alexandre and Fei-Fei, Li and Savarese, Silvio , title =. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages =
-
[26]
Proceedings of the European Conference on Computer Vision , pages =
Salzmann, Tim and Ivanovic, Boris and Chakravarty, Punarjay and Pavone, Marco , title =. Proceedings of the European Conference on Computer Vision , pages =
-
[27]
, title =
Deo, Nachiket and Trivedi, Mohan M. , title =. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops , pages =
-
[28]
IEEE Transactions on Intelligent Vehicles , volume =
Paden, Brian and Cap, Michal and Yong, Sze Zheng and Yershov, Dmitry and Frazzoli, Emilio , title =. IEEE Transactions on Intelligent Vehicles , volume =
-
[29]
, title =
LaValle, Steven M. , title =
-
[30]
The International Journal of Robotics Research , volume =
Karaman, Sertac and Frazzoli, Emilio , title =. The International Journal of Robotics Research , volume =
-
[31]
, title =
LaValle, Steven M. , title =. Technical Report, Computer Science Department, Iowa State University , year =
-
[32]
and Lin, Ming and Manocha, Dinesh , title =
van den Berg, Jur and Guy, Stephen J. and Lin, Ming and Manocha, Dinesh , title =. Robotics Research , pages =
-
[33]
, title =
Sharon, Guni and Stern, Roni and Felner, Ariel and Sturtevant, Nathan R. , title =. Artificial Intelligence , volume =
-
[34]
Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment , pages =
Silver, David , title =. Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment , pages =
-
[35]
and Felner, Ariel and Koenig, Sven and Ma, Hang and Walker, Thayne T
Stern, Roni and Sturtevant, Nathan R. and Felner, Ariel and Koenig, Sven and Ma, Hang and Walker, Thayne T. and Li, Jiaoyang and Atzmon, Dor and Cohen, Liron and Kumar, T. K. Satish and Boyarski, Eli and Bartak, Roman , title =. Proceedings of the International Symposium on Combinatorial Search , volume =
-
[36]
Ma, Hang and Li, Jiaoyang and Kumar, T. K. Satish and Koenig, Sven , title =. Proceedings of the International Conference on Autonomous Agents and Multiagent Systems , pages =
-
[37]
Proceedings of the AAAI Conference on Artificial Intelligence , year =
Okumura, Keisuke , title =. Proceedings of the AAAI Conference on Artificial Intelligence , year =
-
[38]
Advanced Robotics , volume =
Fraichard, Thierry and Asama, Hajime , title =. Advanced Robotics , volume =
-
[39]
and Chryssanthacopoulos, James P
Kochenderfer, Mykel J. and Chryssanthacopoulos, James P. , title =. Lincoln Laboratory Journal , volume =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.