Towards World Model-Empowered Integrated Sensing, Communication, and Decision for Complex Unmanned Systems
Pith reviewed 2026-06-30 03:21 UTC · model grok-4.3
The pith
A unified world model jointly optimizes sensing, communication, and decision for unmanned systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
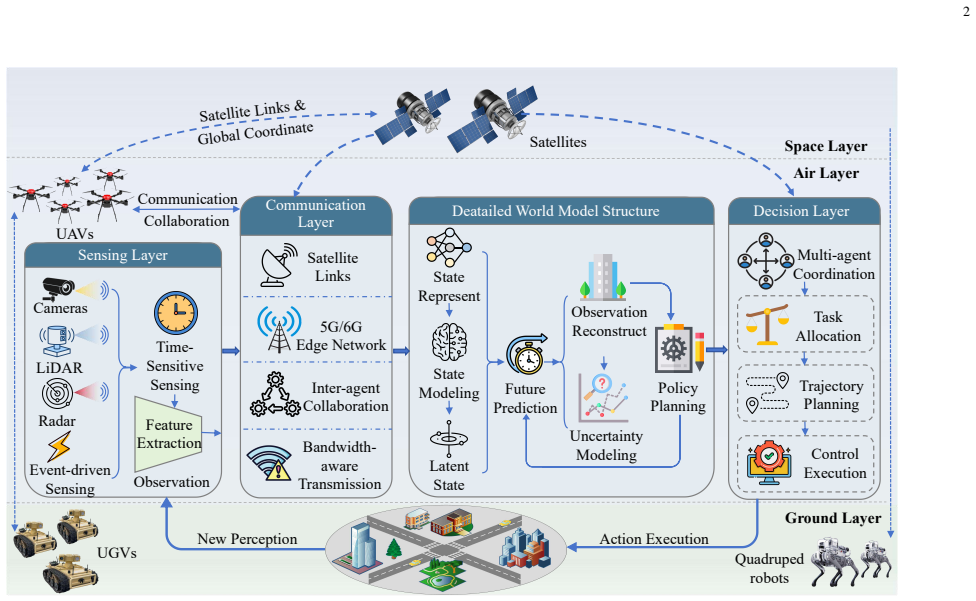
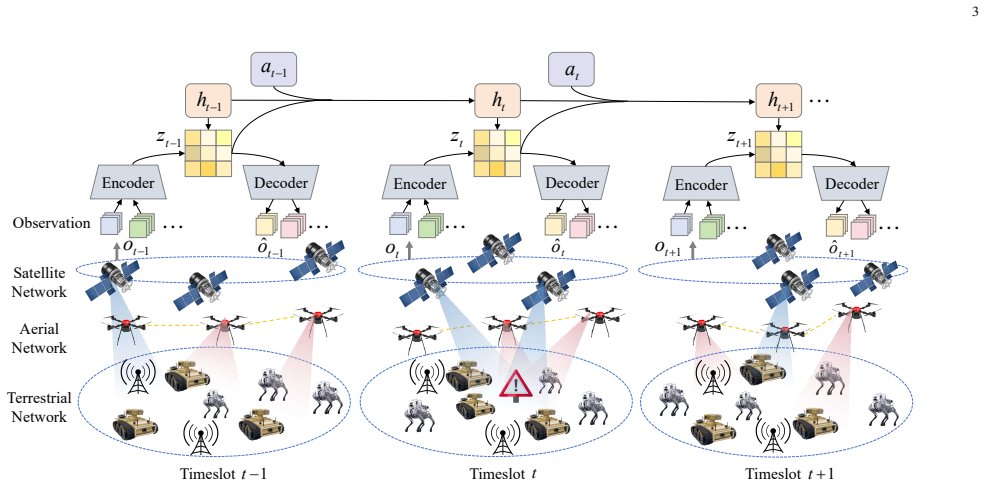
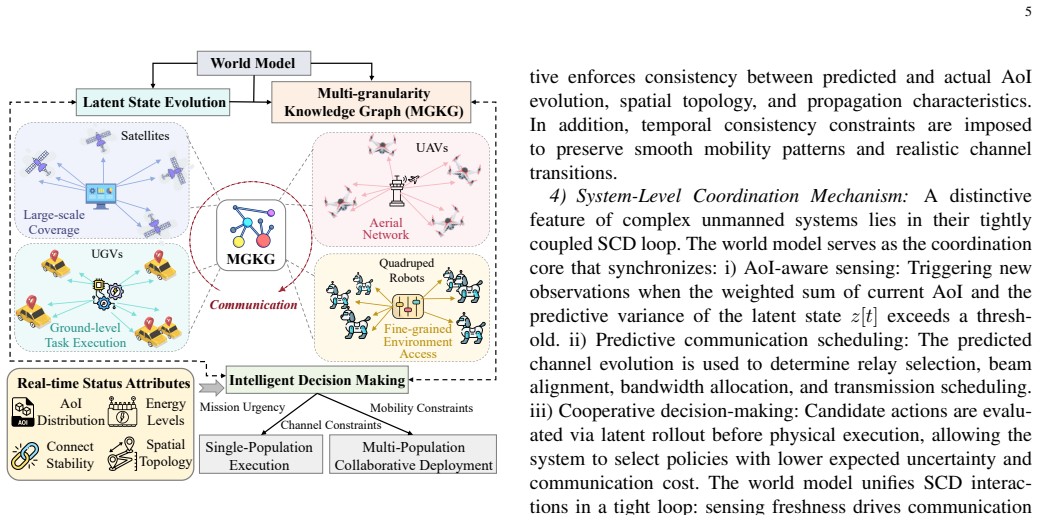
The proposed SCD framework establishes a closed-loop system where a unified world model jointly optimizes time-sensitive sensing, wireless communication, and intelligent decision-making. A time-sensitive AoI-driven sensing mechanism dynamically schedules sensing updates based on task urgency and predictive uncertainty. A predictive world model jointly represents environmental dynamics, wireless channel evolution, and agent mobility within a hybrid deterministic-stochastic latent space, enabling proactive communication scheduling and decision evaluation via latent rollout. A multi-granularity knowledge graph organizes cross-population relationships among satellites, UAVs, UGVs, and ground age
What carries the argument
The predictive world model in a hybrid deterministic-stochastic latent space that jointly represents environmental dynamics, wireless channel evolution, and agent mobility to enable proactive scheduling and latent-rollout evaluation.
If this is right
- AoI-driven sensing reduces redundant data generation while preserving freshness for time-sensitive tasks.
- Latent rollout permits evaluation of candidate decisions inside the model before they are executed in the physical environment.
- The multi-granularity knowledge graph enables coordination across heterogeneous agent populations at different scales.
- The overall closed-loop architecture supports large-scale unmanned operations more efficiently than separate sensing, communication, and decision pipelines.
Where Pith is reading between the lines
- Anticipatory scheduling could lower total communication energy by avoiding transmissions that later prove unnecessary.
- The same latent-space structure might transfer to predictive control in other mobile networks where channel and mobility states interact.
- Real deployments would need to measure how well the hybrid latent representation tracks actual sensor and channel traces beyond simulation.
Load-bearing premise
That a single predictive world model in a hybrid deterministic-stochastic latent space can accurately represent and enable proactive optimization of environmental dynamics, wireless channel evolution, and agent mobility simultaneously.
What would settle it
A controlled test in which the world model's channel or mobility predictions deviate enough from measured data that the resulting SCD schedule performs no better than independent sensing, communication, and decision modules.
Figures
read the original abstract
Complex unmanned systems comprising satellites, unmanned aerial vehicles (UAVs), unmanned ground vehicles (UGVs), and quadruped robots are increasingly deployed to perform large-scale sensing and autonomous operations. We propose a world model-empowered sensing, communication, decision (SCD) integration framework for complex unmanned communication networks. The proposed architecture establishes a closed-loop system where a unified world model jointly optimizes time-sensitive sensing, wireless communication, and intelligent decision-making. To regulate sensing freshness and reduce redundant data generation, we propose a time-sensitive age of information (AoI)-driven sensing mechanism that dynamically schedules sensing updates based on task urgency and predictive uncertainty. Furthermore, a predictive world model is developed to jointly represent environmental dynamics, wireless channel evolution, and agent mobility within a hybrid deterministic-stochastic latent space. This enables proactive communication scheduling and decision evaluation via latent rollout. To support large-scale heterogeneous coordination, a multi-granularity knowledge graph is further designed to organize cross-population relationships among satellites, UAVs, UGVs, and ground agents. Numerical results demonstrate that the proposed SCD framework outperforms conventional systems, highlighting the significant potential of world models for supporting unmanned systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a world model-empowered sensing-communication-decision (SCD) integration framework for complex unmanned systems (satellites, UAVs, UGVs, quadruped robots). Key elements include an AoI-driven sensing mechanism that schedules updates based on task urgency and predictive uncertainty, a predictive world model representing environmental dynamics, wireless channel evolution, and agent mobility in a hybrid deterministic-stochastic latent space to enable proactive scheduling via latent rollouts, and a multi-granularity knowledge graph for heterogeneous coordination. The central claim is that numerical results demonstrate outperformance over conventional systems.
Significance. If the numerical results are reproducible and the joint world model proves accurate across the three domains without prohibitive error accumulation, the work could meaningfully advance proactive, closed-loop integration of sensing, communication, and decision-making in large-scale unmanned networks. The hybrid latent-space formulation and multi-granularity graph are conceptually coherent directions, though their practical impact hinges on validation that is not yet visible.
major comments (3)
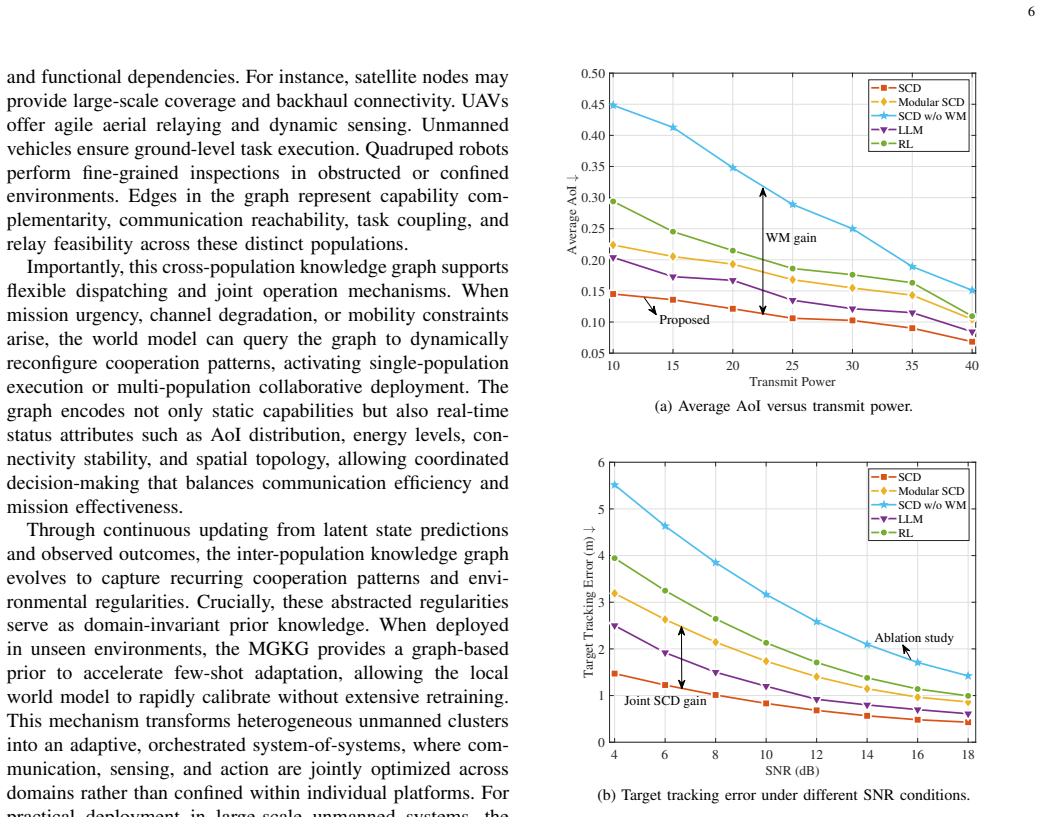
- [Numerical Results] Numerical Results section: the abstract asserts that the SCD framework 'outperforms conventional systems,' yet supplies no baselines, metrics, simulation parameters, statistical tests, or error bars. This absence is load-bearing for the primary empirical claim.
- [§3–4] World-model construction (abstract and §3–4): the premise that a single hybrid deterministic-stochastic latent model can simultaneously and accurately capture environmental dynamics, wireless channel evolution, and multi-agent mobility is stated without any reported analysis of cross-domain error accumulation, model mismatch, or rollout fidelity. This assumption underpins the proactive-scheduling gains.
- [§2] AoI-driven sensing mechanism (abstract and §2): the claim that the mechanism 'regulates sensing freshness and reduces redundant data' is presented without a derivation or comparison showing that the uncertainty-aware scheduler improves upon standard AoI or periodic policies under the same channel and mobility models.
minor comments (2)
- [Abstract] Abstract: the phrase 'numerical results demonstrate outperformance' should be accompanied by at least one concrete metric and baseline to allow readers to gauge the magnitude of the reported gains.
- [§3] Notation: the hybrid deterministic-stochastic latent space is introduced without an explicit definition of the state-transition or observation models; adding a short equation block would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We agree that the current manuscript requires additional details to substantiate its empirical claims and analytical components. We will revise the manuscript to address each major comment as described below.
read point-by-point responses
-
Referee: [Numerical Results] Numerical Results section: the abstract asserts that the SCD framework 'outperforms conventional systems,' yet supplies no baselines, metrics, simulation parameters, statistical tests, or error bars. This absence is load-bearing for the primary empirical claim.
Authors: We agree that the abstract and Numerical Results section lack the necessary details on baselines, metrics, simulation parameters, statistical tests, and error bars. In the revised manuscript, we will expand the Numerical Results section to specify the baselines (e.g., periodic sensing and standard AoI policies), metrics (e.g., task completion rate, latency, AoI), simulation parameters, and include error bars with statistical significance from multiple runs. revision: yes
-
Referee: [§3–4] World-model construction (abstract and §3–4): the premise that a single hybrid deterministic-stochastic latent model can simultaneously and accurately capture environmental dynamics, wireless channel evolution, and multi-agent mobility is stated without any reported analysis of cross-domain error accumulation, model mismatch, or rollout fidelity. This assumption underpins the proactive-scheduling gains.
Authors: The referee correctly notes the absence of analysis on cross-domain error accumulation, model mismatch, and rollout fidelity. We will add a dedicated analysis subsection in §3–4 that quantifies prediction accuracy for each domain, discusses potential mismatches, and evaluates rollout fidelity through targeted experiments to support the proactive scheduling claims. revision: yes
-
Referee: [§2] AoI-driven sensing mechanism (abstract and §2): the claim that the mechanism 'regulates sensing freshness and reduces redundant data' is presented without a derivation or comparison showing that the uncertainty-aware scheduler improves upon standard AoI or periodic policies under the same channel and mobility models.
Authors: We acknowledge that the AoI-driven sensing mechanism lacks a detailed derivation and comparative evaluation. The revision will include a mathematical derivation of the uncertainty-aware scheduler in §2 and add simulation comparisons against standard AoI and periodic policies under identical channel and mobility models to demonstrate improvements in freshness and redundancy reduction. revision: yes
Circularity Check
No circularity: framework proposal relies on external numerical validation without self-referential reductions
full rationale
The provided abstract and description contain no equations, derivations, or parameter-fitting steps that reduce any claimed result to its own inputs by construction. The SCD framework, AoI sensing mechanism, hybrid latent world model, and knowledge graph are introduced as architectural proposals whose performance is asserted via unspecified numerical results rather than derived from fitted quantities or self-citations. No self-definitional loops, fitted-input predictions, or load-bearing self-citations appear in the text. The central claim therefore remains open to external falsification and does not collapse to renaming or ansatz smuggling.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Robust Optimization Models for Planning Drone Swarm Missions,
R. Panowicz and W. Stecz, “Robust Optimization Models for Planning Drone Swarm Missions,”Drones, vol. 8, no. 10, pp. 572, Oct. 2024
2024
-
[2]
Understanding World or Predicting Future? A Compre- hensive Survey of World Models,
J. Dinget al., “Understanding World or Predicting Future? A Compre- hensive Survey of World Models,”ACM Comput. Surv., vol. 58, no. 3, pp. 1–38, Mar. 2025
2025
-
[3]
Dreaming: Model-based Reinforcement Learning by Latent Imagination Without Reconstruction,
M. Okada and T. Taniguchi, “Dreaming: Model-based Reinforcement Learning by Latent Imagination Without Reconstruction,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), Xi’an, China, May 2021, pp. 4209– 4215
2021
-
[4]
Dream to Control: Learning Behaviors by Latent Imagination,
D. Hafneret al., “Dream to Control: Learning Behaviors by Latent Imagination,” inProc. Int. Conf. Learn. Represent. (ICLR), Addis Ababa, Ethiopia, Apr. 2020
2020
-
[5]
DMWM: Dual-Mind World Model with Long-Term Imagination,
L. Wanget al., “DMWM: Dual-Mind World Model with Long-Term Imagination,” inProc. Adv. Neural Inf. Process. Syst. (NeurIPS), San Diego, CA, USA, Dec. 2025
2025
-
[6]
Neural kernel surface reconstruction
W. Huanget al., “PointWorld: Scaling 3D World Models for In-The-Wild Robotic Manipulation,”arXiv preprint arXiv:2601.03782, Jan. 2026
-
[7]
Puzzle it Out: Local-to-Global World Model for Offline Multi-Agent Reinforcement Learning,
X. Liet al., “Puzzle it Out: Local-to-Global World Model for Offline Multi-Agent Reinforcement Learning,”arXiv preprint arXiv:2601.07463, Feb. 2026
-
[8]
TD-MPC2: Scalable, Robust World Models for Con- tinuous Control,
N. Hansenet al., “TD-MPC2: Scalable, Robust World Models for Con- tinuous Control,” inProc. Int. Conf. Learn. Represent. (ICLR), Vienna, Austria, May 2024
2024
-
[9]
DayDreamer: World Models for Physical Robot Learning,
P. Wuet al., “DayDreamer: World Models for Physical Robot Learning,” inProc. Conf. Robot Learn. (CoRL), Nov. 2023, pp. 2226–2240
2023
-
[10]
YOLOP: You Only Look Once for Panoptic Driving Perception,
D. Wuet al., “YOLOP: You Only Look Once for Panoptic Driving Perception,”Mach. Intell. Res., vol. 19, no. 6, pp. 550–562, Nov. 2022
2022
-
[11]
Query-Centric Trajectory Prediction,
Z. Zhouet al., “Query-Centric Trajectory Prediction,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), Jun. 2023, pp. 17863–17873
2023
-
[12]
World Model-Based Learning for Long-Term Age of Information Minimization in Vehicular Networks,
L. Wanget al., “World Model-Based Learning for Long-Term Age of Information Minimization in Vehicular Networks,”arXiv preprint arXiv:2505.01712, Aug. 2025
-
[13]
Concept and Key Technologies of Time-Sensitive Age of Information in Mega Constellation Networks,
W. Xuet al., “Concept and Key Technologies of Time-Sensitive Age of Information in Mega Constellation Networks,”J. Space Technol. Eng., vol. 2, no. 4, pp. 32–40, Feb. 2025
2025
-
[14]
Zhaoet al., “AirScape: An Aerial Generative World Model With Motion Controllability,’ inProc
B. Zhaoet al., “AirScape: An Aerial Generative World Model With Motion Controllability,’ inProc. ACM Int. Conf. Multimedia (MM), Dublin, Ireland, Oct. 2025, pp. 12519–12528
2025
-
[15]
Knowledge Graphs: Opportunities and Challenges,
C. Penget al., “Knowledge Graphs: Opportunities and Challenges,” Artif. Intell. Rev., vol. 56, no. 10, pp. 13071–13102, Oct. 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.