Rethinking Continual Anomaly Detection on the Edge: Benchmarking Under Realistic Industrial Conditions
Pith reviewed 2026-06-30 16:00 UTC · model grok-4.3
The pith
DINOSaur uses a frozen DINOv3 backbone and coreset memory to achieve zero forgetting while outperforming other continual anomaly detection methods on edge hardware.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
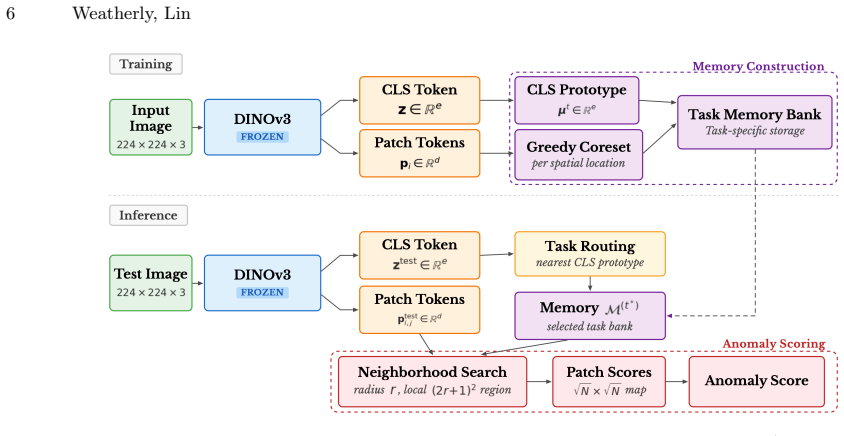
DINOSaur is a training-free method that combines a frozen DINOv3 backbone with spatially-indexed coreset memory and neighborhood-restricted anomaly scoring. It achieves zero forgetting by construction, outperforms all evaluated methods across all five protocols, runs at sub-100 ms inference on an NVIDIA Jetson Orin Nano, and completes on-device adaptation to new tasks in under 30 seconds.
What carries the argument
Spatially-indexed coreset memory paired with neighborhood-restricted anomaly scoring on a frozen DINOv3 backbone, which enables training-free operation and zero forgetting by design.
If this is right
- Existing continual anomaly detection methods do not consistently outperform traditional approaches that use simple experience replay.
- DINOSaur maintains zero forgetting across both discrete-task and continuous drift protocols.
- Inference completes in under 100 milliseconds on NVIDIA Jetson Orin Nano hardware.
- On-device adaptation to new tasks finishes in under 30 seconds without any training.
- The new benchmark protocols enable more realistic evaluation of industrial continual anomaly detection systems.
Where Pith is reading between the lines
- Memory-based designs that skip fine-tuning may prove more practical than continual learning techniques that try to mitigate forgetting through parameter updates.
- If the continuous drift protocol matches real factory changes, methods built around explicit task boundaries become less suitable than approaches that handle gradual shifts directly.
- The same frozen-backbone plus indexed memory pattern could be examined for other edge continual tasks such as classification or segmentation under distribution shift.
- Repeating the efficiency measurements on additional edge platforms would test whether the reported speed and adaptation times generalize.
Load-bearing premise
The introduced discrete-task and continuous drift protocols along with the head-to-head comparisons accurately reflect realistic industrial conditions without favoring certain method classes through implementation choices or data selection.
What would settle it
A side-by-side run on a live factory line under continuous production drift where an experience-replay baseline matches or exceeds DINOSaur in detection accuracy or adaptation speed would falsify the performance claims.
Figures
read the original abstract
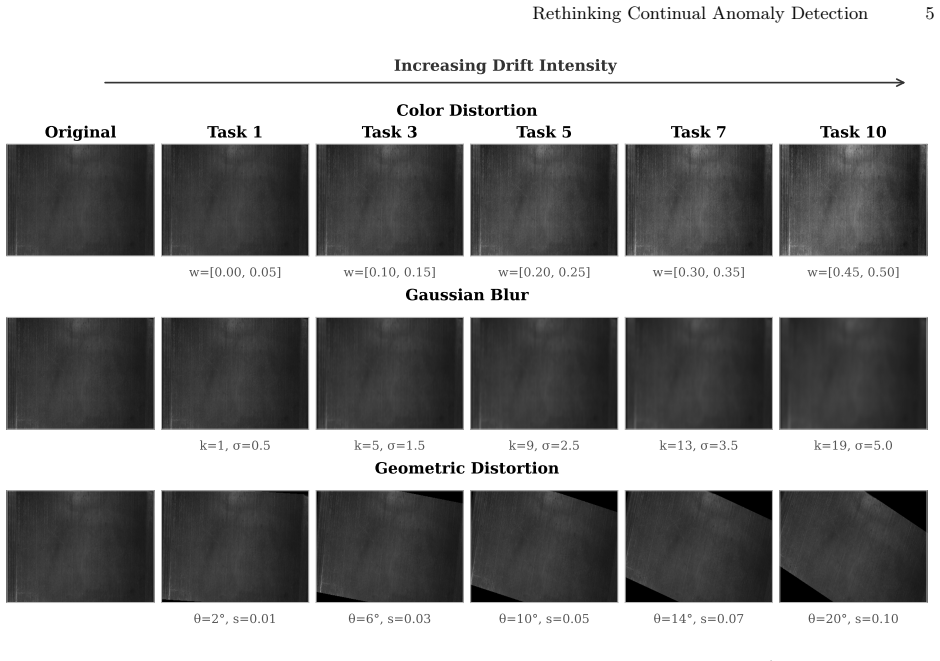
Continual anomaly detection (CAD) addresses the need for industrial inspection systems to adapt to evolving production conditions, yet existing methods share three critical gaps: unrealistic evaluation, no systematic comparison, and no consideration of edge deployment constraints. We introduce a unified benchmark combining discrete-task evaluation on structural and logical anomalies, a novel continuous drift protocol, the first head-to-head comparison of all published CAD methods, and computational efficiency profiling on edge hardware. Our results reveal that existing CAD methods do not consistently outperform traditional approaches with simple experience replay. Thus motivated, we propose DINOSaur, a training-free method combining a frozen DINOv3 backbone with spatially-indexed coreset memory and neighborhood-restricted anomaly scoring. DINOSaur achieves zero forgetting by construction, outperforms all evaluated methods across all five protocols, and runs at sub-100\,ms inference on an NVIDIA Jetson Orin Nano, with on-device adaptation to new tasks in under 30 seconds.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a unified benchmark for continual anomaly detection (CAD) under realistic industrial conditions, combining discrete-task evaluation on structural and logical anomalies with a novel continuous drift protocol. It performs the first head-to-head comparison of published CAD methods, profiles computational efficiency on edge hardware (NVIDIA Jetson Orin Nano), and proposes DINOSaur: a training-free method using a frozen DINOv3 backbone, spatially-indexed coreset memory, and neighborhood-restricted anomaly scoring. The central claims are that existing CAD methods do not consistently beat simple experience replay, DINOSaur achieves zero forgetting by construction, outperforms all baselines across five protocols, runs at sub-100 ms inference, and adapts on-device in under 30 seconds.
Significance. If the protocols and comparisons hold, the work would be significant for shifting CAD research toward edge-deployable, training-free solutions and more realistic evaluation. The provision of a unified benchmark with efficiency metrics and the explicit comparison against replay baselines are strengths that could influence industrial practice; the zero-forgetting property by construction is a clear technical advantage worth highlighting.
major comments (2)
- [§5, §4.1–4.2] §5 (Experimental Results) and §4.1–4.2 (Benchmark Protocols): The headline claim that DINOSaur 'outperforms all evaluated methods across all five protocols' is load-bearing, yet the description of baseline re-implementations provides no evidence of equivalent hyper-parameter search budget, data-preprocessing pipeline, or edge-deployment constraints applied uniformly to replay-based and other CAD methods. Without this, the ranking could arise from unequal tuning rather than method superiority, directly undermining the motivation and conclusion that 'existing CAD methods do not consistently outperform traditional approaches with simple experience replay'.
- [§4.2] §4.2 (Continuous Drift Protocol): The protocol definition does not specify how drift magnitude, frequency, and anomaly injection are controlled or whether these choices were validated to avoid favoring memory-based methods (such as the proposed spatially-indexed coreset) over gradient-based or replay methods; this is central to the claim that the benchmark reflects 'realistic industrial conditions'.
minor comments (2)
- [Abstract] Abstract: The abstract asserts 'sub-100 ms inference' and 'under 30 seconds' adaptation without reporting the precise measurement protocol (batch size, input resolution, or warm-up steps), which should be clarified for reproducibility.
- [§3] §3 (DINOSaur Method): The neighborhood-restricted anomaly scoring is introduced without an equation or pseudocode; adding a compact formal definition would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the fairness of our baseline comparisons and the specification of the continuous drift protocol. We address each major comment below and will revise the manuscript to incorporate additional details where appropriate.
read point-by-point responses
-
Referee: [§5, §4.1–4.2] §5 (Experimental Results) and §4.1–4.2 (Benchmark Protocols): The headline claim that DINOSaur 'outperforms all evaluated methods across all five protocols' is load-bearing, yet the description of baseline re-implementations provides no evidence of equivalent hyper-parameter search budget, data-preprocessing pipeline, or edge-deployment constraints applied uniformly to replay-based and other CAD methods. Without this, the ranking could arise from unequal tuning rather than method superiority, directly undermining the motivation and conclusion that 'existing CAD methods do not consistently outperform traditional approaches with simple experience replay'.
Authors: We agree that explicit documentation of the baseline implementation process is necessary to support the fairness of the comparisons. All methods were re-implemented following the configurations and hyper-parameters reported in their original publications, with identical data preprocessing pipelines and the same edge-deployment constraints (including inference latency measurement on the NVIDIA Jetson Orin Nano) applied uniformly, including to replay-based approaches. To make this transparent, we will add a new subsection to §4.1 with a table summarizing hyper-parameters, tuning procedures, and confirmation of uniform constraints across all methods. This revision will strengthen the motivation that existing CAD methods do not consistently outperform simple experience replay. revision: yes
-
Referee: [§4.2] §4.2 (Continuous Drift Protocol): The protocol definition does not specify how drift magnitude, frequency, and anomaly injection are controlled or whether these choices were validated to avoid favoring memory-based methods (such as the proposed spatially-indexed coreset) over gradient-based or replay methods; this is central to the claim that the benchmark reflects 'realistic industrial conditions'.
Authors: The continuous drift protocol parameters were selected to reflect realistic industrial production shifts, informed by discussions with domain experts. We will revise §4.2 to explicitly define drift magnitude (e.g., controlled feature distribution shifts), frequency (incremental steps), and anomaly injection rates, and add validation experiments (e.g., performance trends across method categories) demonstrating that the protocol does not systematically favor memory-based methods over others. This will better substantiate the claim of realistic industrial conditions. revision: yes
Circularity Check
No circularity: empirical benchmark and design-based method proposal
full rationale
The paper introduces new evaluation protocols and a training-free method (DINOSaur) whose zero-forgetting property is stated as holding 'by construction' due to the frozen DINOv3 backbone and absence of parameter updates. This is an explicit design choice, not a derivation that reduces an output to its inputs via equations or fitted parameters. No self-citation chains, ansatzes smuggled via prior work, or uniqueness theorems are invoked to justify core claims. Head-to-head results on the defined protocols are empirical measurements rather than predictions forced by construction. The derivation chain consists of benchmark definition followed by direct evaluation and is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Frozen DINOv3 backbone provides sufficiently general features for anomaly detection across industrial domains without fine-tuning.
invented entities (2)
-
Spatially-indexed coreset memory
no independent evidence
-
Neighborhood-restricted anomaly scoring
no independent evidence
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.