EAGG: Embodiment-Aligned Grasp Generation via Geometry-Aware Graph Conditioning
Pith reviewed 2026-06-27 00:33 UTC · model grok-4.3
The pith
A single grasp generator can match specialized models across six different robot hands by aligning each hand's structure.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
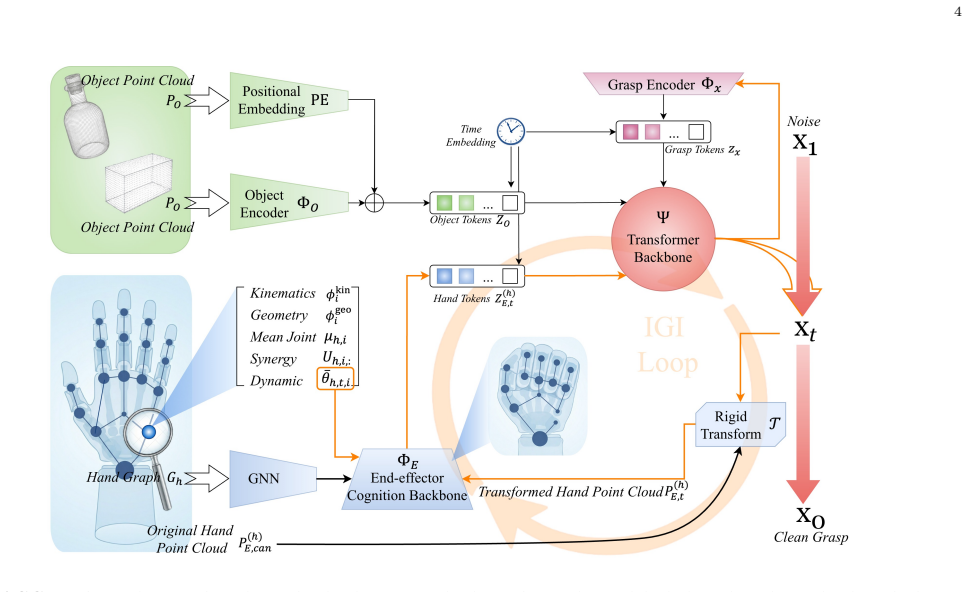
EAGG represents each embodiment with a topology-aware end-effector graph and an embodiment-specific low-dimensional end-effector control space. A frozen end-effector-cognition backbone converts the current articulated state into geometry-aware tokens that act as a reusable morphology prior, and iterative geometry injection refreshes these tokens throughout sampling so that conditioning remains synchronized with the evolving end-effector geometry.
What carries the argument
The topology-aware end-effector graph with iterative geometry injection, which produces reusable morphology priors from a frozen backbone and keeps them synchronized during grasp sampling.
If this is right
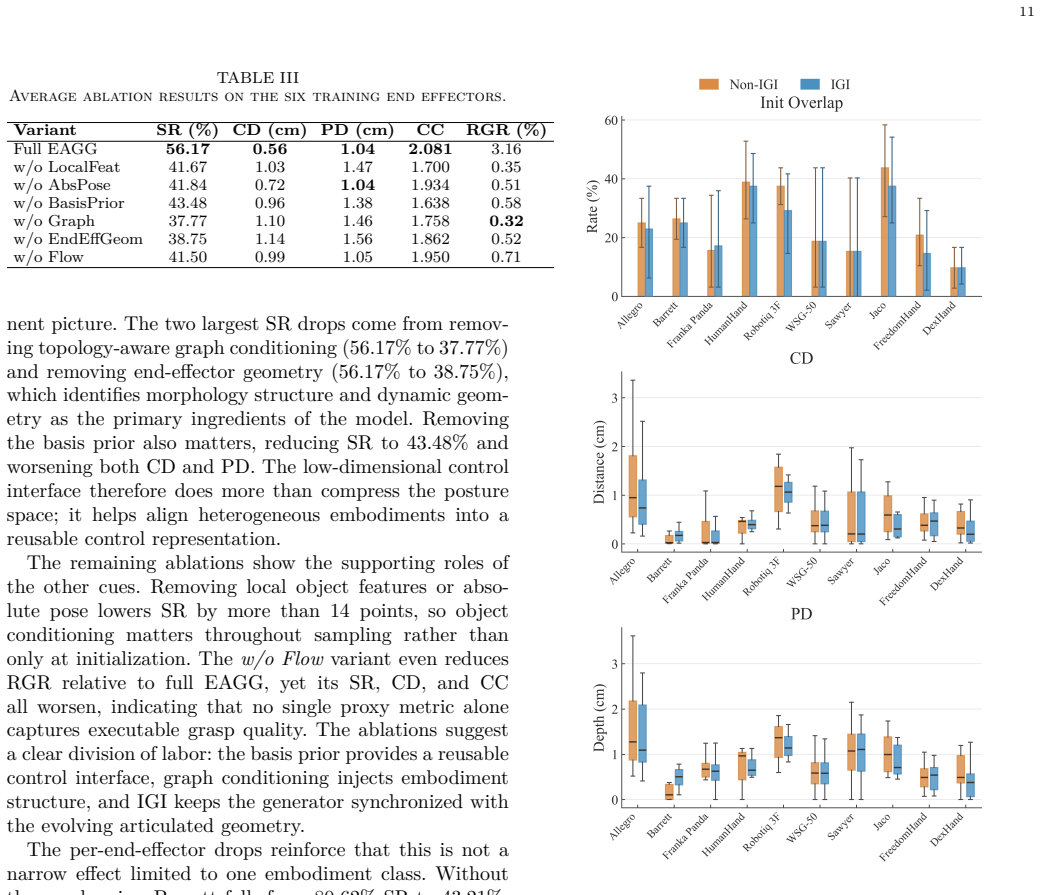
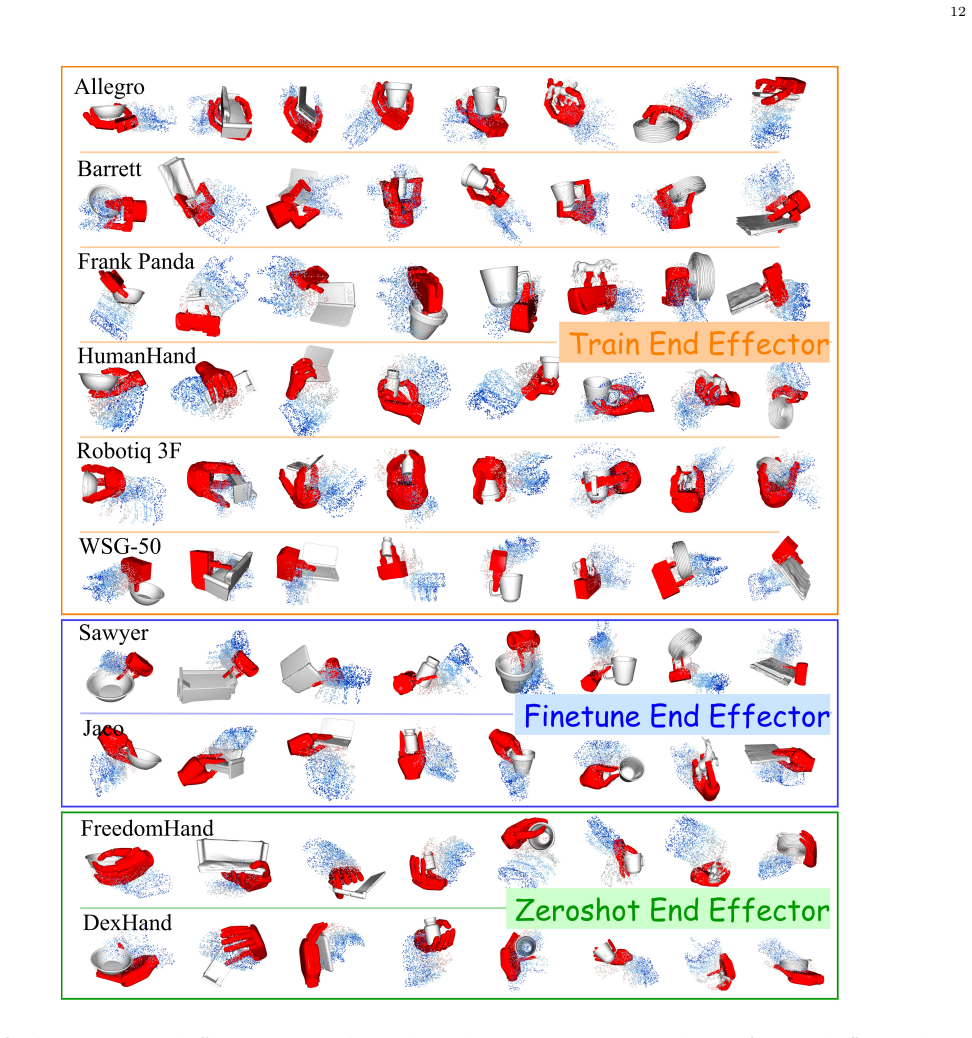
- On the MultiGripperGrasp benchmark, EAGG reaches 56.17% average success across six training end effectors.
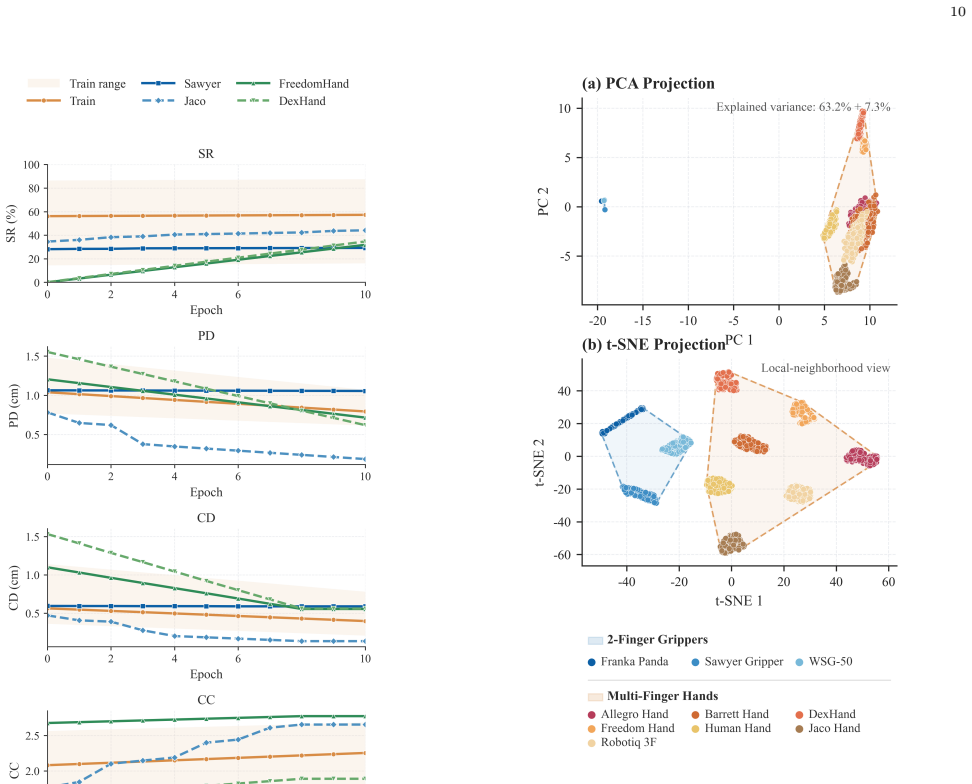
- It remains within 1.10 percentage points of specialized training while preserving transfer to finetuning and zero-shot end effectors.
- Iterative geometry injection reduces the pooled median contact distance from 0.239 cm to 0.189 cm.
Where Pith is reading between the lines
- This method implies that explicit embodiment alignment could apply to other robotics tasks like placement or assembly.
- Testing the approach on hands with very different actuation couplings might reveal limits of the graph representation.
- Zero-shot performance suggests potential for rapid adaptation to new end effectors without full retraining.
Load-bearing premise
That a frozen end-effector-cognition backbone can produce reusable geometry-aware tokens from the articulated state that stay useful when refreshed iteratively with new geometry.
What would settle it
A test showing that a version without iterative geometry injection achieves the same or lower median contact distance on the benchmark would indicate that synchronization is not necessary.
Figures
read the original abstract
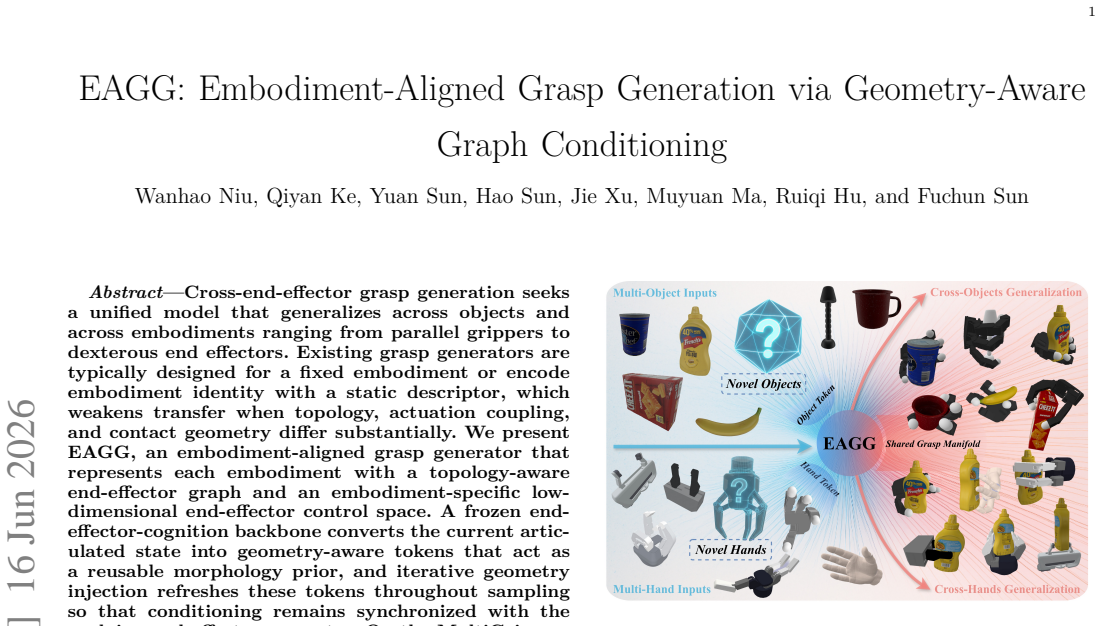
Cross-end-effector grasp generation seeks a unified model that generalizes across objects and across embodiments ranging from parallel grippers to dexterous end effectors. Existing grasp generators are typically designed for a fixed embodiment or encode embodiment identity with a static descriptor, which weakens transfer when topology, actuation coupling, and contact geometry differ substantially. We present EAGG, an embodiment-aligned grasp generator that represents each embodiment with a topology-aware end-effector graph and an embodiment-specific low-dimensional end-effector control space. A frozen end-effector-cognition backbone converts the current articulated state into geometry-aware tokens that act as a reusable morphology prior, and iterative geometry injection refreshes these tokens throughout sampling so that conditioning remains synchronized with the evolving end-effector geometry. On the MultiGripperGrasp benchmark, EAGG reaches 56.17% average success across six training end effectors, remaining within 1.10 percentage points of specialized training while preserving transfer to finetuning and zero-shot end effectors. Iterative geometry injection further reduces the pooled median contact distance from 0.239 cm to 0.189 cm. These results show that cross-end-effector grasp generation is strengthened by aligning embodiment structure inside a shared generator rather than suppressing embodiment differences. Code is available at https://github.com/wanhaoniu/EAGG.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces EAGG, a unified grasp generator for cross-end-effector settings. It represents each embodiment via a topology-aware end-effector graph plus a low-dimensional control space, employs a frozen end-effector-cognition backbone to produce reusable geometry-aware tokens, and applies iterative geometry injection to keep conditioning synchronized with evolving geometry during sampling. On the MultiGripperGrasp benchmark the method reports 56.17% average success across six training end effectors (within 1.10 pp of per-embodiment specialized training), with preserved transfer to finetuning and zero-shot cases, and a reduction in pooled median contact distance from 0.239 cm to 0.189 cm when iterative injection is used. Code is released.
Significance. If the reported margins and transfer results hold under the stated experimental protocol, the work is significant for robotics: it demonstrates that explicit embodiment structure (graph topology plus iterative geometry refresh) can be retained inside a single generator without sacrificing performance relative to specialized models. The public code release and concrete benchmark numbers constitute reproducible evidence for the central architectural claim.
minor comments (3)
- The abstract and §4 report success rates and contact-distance reductions but do not state the precise definition of “success” (e.g., whether it requires force closure, a minimum number of contacts, or a simulation threshold); adding this definition would strengthen the results section.
- Table or figure captions for the MultiGripperGrasp results should explicitly list the six training end effectors, the finetuning set, and the zero-shot set so that the transfer claims can be verified without cross-referencing the text.
- The description of the frozen backbone (how its output tokens are produced from the articulated state) would benefit from a short pseudocode block or explicit input/output dimensions in the methods section.
Simulated Author's Rebuttal
We thank the referee for the positive summary, significance assessment, and recommendation of minor revision. The report contains no major comments requiring point-by-point rebuttal.
Circularity Check
No significant circularity detected
full rationale
The paper describes an architectural method (topology-aware graph, frozen backbone, iterative geometry injection) and reports independent benchmark results on MultiGripperGrasp (56.17% success, 1.10 pp gap, contact-distance reduction). No derivation chain reduces a claimed prediction or result to its own inputs by construction, no fitted parameters are renamed as predictions, and no load-bearing self-citations or uniqueness theorems are invoked. The evaluation metrics are external to the model's internal definitions, making the central claims self-contained against the benchmark.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A frozen end-effector-cognition backbone converts the current articulated state into geometry-aware tokens that act as a reusable morphology prior.
Reference graph
Works this paper leans on
-
[1]
Dex-net 2.0: Deep learning to plan robust grasps with synthetic point clouds and analytic grasp metrics,
J. Mahler, J. Liang, S. Niyaz et al. , “Dex-net 2.0: Deep learning to plan robust grasps with synthetic point clouds and analytic grasp metrics,” in Robotics: Science and Systems (RSS) , 2017
2017
-
[2]
Pointnetgpd: Detecting grasp configurations from point sets,
H. Liang, X. Ma, S. Li, M. Görner, S. Tang, B. Fang, F. Sun, and J. Zhang, “Pointnetgpd: Detecting grasp configurations from point sets,” in 2019 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, 2019, pp. 3629–3635
2019
-
[3]
6-dof graspnet: Varia- tional grasp generation for object manipulation,
A. Mousavian, C. Eppner, and D. Fox, “6-dof graspnet: Varia- tional grasp generation for object manipulation,” in Proceedings of the IEEE/CVF International Conference on Computer Vi- sion, 2019, pp. 2901–2910
2019
-
[4]
S4g: Amodal single-view single- shot se(3) grasp detection in cluttered scenes,
Y. Qin, R. Chen, H. Zhu et al., “S4g: Amodal single-view single- shot se(3) grasp detection in cluttered scenes,” in Conference on Robot Learning. PMLR, 2020, pp. 53–65
2020
-
[5]
Contact- graspnet: Efficient 6-dof grasp generation in cluttered scenes,
M. Sundermeyer, A. Mousavian, R. Tribelhorn et al. , “Contact- graspnet: Efficient 6-dof grasp generation in cluttered scenes,” in 2021 IEEE International Conference on Robotics and Au- tomation (ICRA) . IEEE, 2021, pp. 13 438–13 444
2021
-
[6]
Dexgraspnet: A large-scale robotic dexterous grasp dataset for general objects based on simulation,
R. Wang, J. Zhang, J. Chen, Y. Xu, P. Li, T. Liu, and H. Wang, “Dexgraspnet: A large-scale robotic dexterous grasp dataset for general objects based on simulation,” in 2023 IEEE Interna- tional Conference on Robotics and Automation (ICRA) . IEEE, 2023, pp. 11 359–11 366
2023
-
[7]
Dexgraspnet 2.0: Learning generative dexterous grasping in large-scale synthetic cluttered scenes,
J. Zhang, H. Liu, D. Li, X. Yu, H. Geng, Y. Ding, J. Chen, and H. Wang, “Dexgraspnet 2.0: Learning generative dexterous grasping in large-scale synthetic cluttered scenes,” in 8th Annual Conference on Robot Learning (CoRL) , 2024
2024
-
[8]
Unidexgrasp: Universal robotic dexterous grasping via learning diverse proposal generation and goal-conditioned policy,
Y. Xu, W. Wan, J. Zhang, H. Liu, Z. Shan, H. Shen, R. Wang, H. Geng, Y. Weng, J. Chen, T. Liu, L. Yi, and H. Wang, “Unidexgrasp: Universal robotic dexterous grasping via learning diverse proposal generation and goal-conditioned policy,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , 2023, pp. 4737–4747
2023
-
[9]
Unidexgrasp++: Improving dexterous grasping policy learn- ing via geometry-aware curriculum and iterative generalist- specialist learning,
W. Wan, H. Geng, Y. Liu, Z. Shan, Y. Yang, L. Yi, and H. Wang, “Unidexgrasp++: Improving dexterous grasping policy learn- ing via geometry-aware curriculum and iterative generalist- specialist learning,” in Proceedings of the IEEE/CVF Interna- tional Conference on Computer Vision (ICCV) , 2023
2023
-
[10]
Multigrippergrasp: A dataset for robotic grasping from parallel jaw grippers to dexterous hands,
L. F. Casas, A. Oveisi, B. Chen, P. Kulkarni, and K. Pereida, “Multigrippergrasp: A dataset for robotic grasping from parallel jaw grippers to dexterous hands,” in 2024 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS) . IEEE, 2024
2024
-
[11]
Cross-embodiment dex- terous grasping with reinforcement learning,
H. Yuan, B. Zhou, Y. Fu, and Z. Lu, “Cross-embodiment dex- terous grasping with reinforcement learning,” in The Thirteenth International Conference on Learning Representations (ICLR) , 2025
2025
-
[12]
Efficient residual learning with mixture-of-experts for universal dexterous grasping,
Z. Huang, H. Yuan, Y. Fu, and Z. Lu, “Efficient residual learning with mixture-of-experts for universal dexterous grasping,” in The Thirteenth International Conference on Learning Repre- sentations (ICLR) , 2025
2025
-
[13]
D(R,O) grasp: A unified representation of robot and object interaction for cross-embodiment dexterous grasping,
Z. Wei, Z. Xu, J. Guo, Y. Hou, C. Gao, Z. Cai, J. Luo, and L. Shao, “D(R,O) grasp: A unified representation of robot and object interaction for cross-embodiment dexterous grasping,” in 2025 IEEE International Conference on Robotics and Automa- tion (ICRA) , 2025
2025
-
[14]
H. Lin, W. Chen, X. Chen, F. Yang, Q. Diao, W. Xie, S. Wu, K. Yang, M. Li, and Y. Wang, “UniFucGrasp: Human- hand-inspired unified functional grasp annotation strategy and dataset for diverse dexterous hands,” arXiv preprint arXiv:2508.03339, 2025
arXiv 2025
-
[15]
DexVLG: Dexterous vision-language-grasp model at scale,
J. He, D. Li, X. Yu, Z. Qi, W. Zhang, J. Chen, Z. Zhang, Z. Zhang, L. Yi, and H. Wang, “DexVLG: Dexterous vision-language-grasp model at scale,” in Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025
2025
-
[16]
Postural hand synergies for tool use,
M. Santello, M. Flanders, and J. F. Soechting, “Postural hand synergies for tool use,” Journal of neuroscience , vol. 18, no. 23, pp. 10 105–10 115, 1998
1998
-
[17]
Dexterous grasping with low-dimensional hand models,
M. T. Ciocarlie and P. K. Allen, “Dexterous grasping with low-dimensional hand models,” in 2007 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, 2007
2007
-
[18]
Hand posture subspaces for dexterous robotic grasping,
M. T. Ciocarlie and P. K. Allen, “Hand posture subspaces for dexterous robotic grasping,” The International Journal of Robotics Research, vol. 28, no. 7, pp. 851–867, 2009
2009
-
[19]
Mapping synergies from human to robotic hands with dis- similar kinematics: An approach in the object domain,
G. Gioioso, G. Salvietti, M. Malvezzi, and D. Prattichizzo, “Mapping synergies from human to robotic hands with dis- similar kinematics: An approach in the object domain,” IEEE Transactions on Robotics, vol. 29, no. 4, pp. 825–837, 2013
2013
-
[20]
Hand synergies: Integration of robotics and neuroscience for understanding the control of biological and artificial hands,
M. Santello, M. Bianchi, M. Gabiccini, E. Ricciardi, G. Salvietti, D. Prattichizzo, M. Ernst, A. Moscatelli, H. Jorntell, A. M. L. Kappers et al. , “Hand synergies: Integration of robotics and neuroscience for understanding the control of biological and artificial hands,” Physics of Life Reviews, vol. 17, pp. 1–23, 2016
2016
-
[21]
Synergy-based grasp synthesis for multi-fingered hands,
H. Jiang, S. Liu, J. Wang et al. , “Synergy-based grasp synthesis for multi-fingered hands,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2021
2021
-
[22]
Dexdiffuser: Gen- erating dexterous grasps with diffusion models,
Z. Weng, H. Lu, D. Kragic, and J. Lundell, “Dexdiffuser: Gen- erating dexterous grasps with diffusion models,” arXiv preprint arXiv:2402.02989, 2024
arXiv 2024
-
[23]
Learning diverse and physically feasible dexterous grasps with generative model and bilevel optimization,
A. Wu, M. Guo, and C. K. Liu, “Learning diverse and physically feasible dexterous grasps with generative model and bilevel optimization,” in Proceedings of The 6th Conference on Robot Learning (CoRL), 2023, pp. 1938–1948
2023
-
[24]
Fast-grasp’d: Dexter- ous multi-finger grasp generation through differentiable simula- tion,
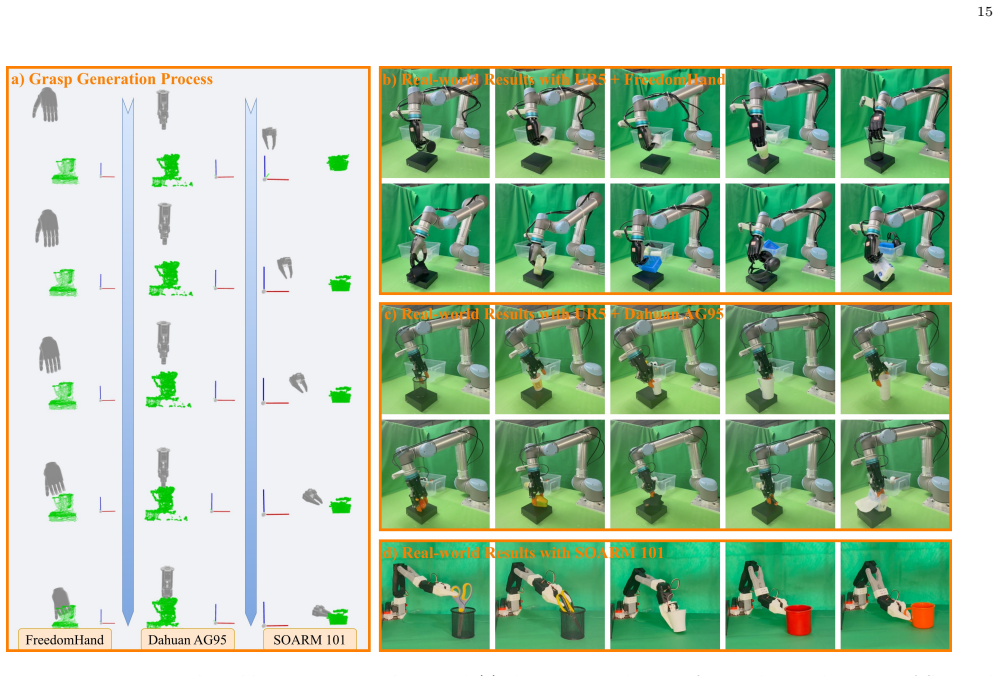
D. Turpin, T. Zhong, S. Zhang, G. Zhu, E. Heiden, M. Macklin, S. Tsogkas, S. Dickinson, and A. Garg, “Fast-grasp’d: Dexter- ous multi-finger grasp generation through differentiable simula- tion,” in 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 8082–8089. 15 Fig. 8. Representative real-world execution results. Panel...
2023
-
[25]
Graingrasp: Dexterous grasp generation with fine-grained contact guidance,
F. Zhao, D. Tsetserukou, and Q. Liu, “Graingrasp: Dexterous grasp generation with fine-grained contact guidance,” in 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 6470–6476
2024
-
[26]
Springgrasp: Synthesizing compliant, dexterous grasps under shape uncertainty,
S. Chen, J. Bohg, and C. K. Liu, “Springgrasp: Synthesizing compliant, dexterous grasps under shape uncertainty,” arXiv preprint arXiv:2404.13532, 2024
arXiv 2024
-
[27]
FFHFlow: Diverse and uncertainty-aware dexterous grasp generation via flow variational inference,
Q. Feng, J. Feng, Z. Chen, R. Triebel, and A. Knoll, “FFHFlow: Diverse and uncertainty-aware dexterous grasp generation via flow variational inference,” in Proceedings of The 9th Conference on Robot Learning (CoRL) , 2025, pp. 1352–1381
2025
-
[28]
DexTOG: Learning task-oriented dexterous grasp with language condi- tion,
J. Zhang, W. Xu, Z. Yu, P. Xie, T. Tang, and C. Lu, “DexTOG: Learning task-oriented dexterous grasp with language condi- tion,” IEEE Robotics and Automation Letters , vol. 10, no. 2, pp. 995–1002, 2025
2025
-
[29]
AffordDexGrasp: Open-set language-guided dexterous grasp with generalizable-instructive affordance,
Y.-L. Wei, M. Lin, Y. Lin, J.-J. Jiang, X.-M. Wu, L.-A. Zeng, and W.-S. Zheng, “AffordDexGrasp: Open-set language-guided dexterous grasp with generalizable-instructive affordance,” in Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) , 2025
2025
-
[30]
G- DexGrasp: Generalizable dexterous grasping synthesis via part- aware prior retrieval and prior-assisted generation,
J. Jian, X. Liu, Z. Chen, M. Li, J. Liu, and R. Hu, “G- DexGrasp: Generalizable dexterous grasping synthesis via part- aware prior retrieval and prior-assisted generation,” in Proceed- ings of the IEEE/CVF International Conference on Computer Vision (ICCV) , 2025
2025
-
[31]
Graspit! a versatile simulator for robotic grasping,
A. Miller and P. Allen, “Graspit! a versatile simulator for robotic grasping,” IEEE Robotics & Automation Magazine , vol. 11, no. 4, pp. 110–122, 2004
2004
-
[32]
The columbia grasp database,
C. Goldfeder, M. Ciocarlie, H. Dang et al., “The columbia grasp database,” in 2009 IEEE International Conference on Robotics and Automation. IEEE, 2009, pp. 1710–1716
2009
-
[33]
The ycb object and model set: Towards common benchmarks for manipulation research,
B. Calli, A. Singh, A. Walsman, S. S. Srinivasa, P. Abbeel, and A. M. Dollar, “The ycb object and model set: Towards common benchmarks for manipulation research,” in 2015 International Conference on Advanced Robotics (ICAR) . IEEE, 2015, pp. 510–517
2015
-
[34]
Egad! an evolved grasp- ing analysis dataset for diversity and reproducibility in robotic manipulation,
D. Morrison, P. Corke, and J. Leitner, “Egad! an evolved grasp- ing analysis dataset for diversity and reproducibility in robotic manipulation,” IEEE Robotics and Automation Letters , vol. 5, no. 3, pp. 4368–4375, 2020
2020
-
[35]
Deep learning approaches to grasp synthesis: A review,
R. Newbury, S. Sun, M. A. Roa et al., “Deep learning approaches to grasp synthesis: A review,” IEEE Transactions on Robotics , vol. 39, no. 5, pp. 3994–4015, 2023
2023
-
[36]
An overview of learning-based dexterous grasping: Recent advances and future directions,
X. Song, Y. Li, Y. Zhang, Y. Liu, and L. Jiang, “An overview of learning-based dexterous grasping: Recent advances and future directions,” Artificial Intelligence Review , vol. 58, p. 300, 2025
2025
-
[37]
Customizable 6 degrees of freedom grasping dataset and an interactive training method for graph convolutional network,
W. Niu, Z. Zhu, H. Wang et al. , “Customizable 6 degrees of freedom grasping dataset and an interactive training method for graph convolutional network,” Engineering Applications of Artificial Intelligence, vol. 138, p. 109320, 2024
2024
-
[38]
Visual-tactile grasp dataset and grasp margin matrix analysis for stability evaluation,
W. Niu, Z. Zhu, J. Zheng et al. , “Visual-tactile grasp dataset and grasp margin matrix analysis for stability evaluation,” IEEE Transactions on Robotics, 2026
2026
-
[39]
Unigrasp: Learning a unified model to grasp with multifingered robotic hands,
L. Shao, F. Ferreira, M. Jorda, V. Nambiar, J. Luo, K. Solovey, P. Agrawal, S. Savarese, M. Müller, R. Shome et al. , “Unigrasp: Learning a unified model to grasp with multifingered robotic hands,” IEEE Robotics and Automation Letters , vol. 5, no. 4, pp. 2286–2293, 2020
2020
-
[40]
Gendexgrasp: Generalizable dexterous grasping,
P. Li, T. Liu, Y. Li, Y. Geng, Y. Zhu, Y. Yang, and S. Huang, “Gendexgrasp: Generalizable dexterous grasping,” in 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023
2023
-
[41]
Transferring grasping across grippers: Learning-optimization hybrid framework for generalized planar grasp generation,
X. Wang and Q. Xu, “Transferring grasping across grippers: Learning-optimization hybrid framework for generalized planar grasp generation,” IEEE Transactions on Robotics , vol. 40, pp. 3388–3405, 2024
2024
-
[42]
X. Fei, Z. Xu, H. Fang, T. Zhang, and L. Shao, “T(R,O) grasp: Efficient graph diffusion of robot-object spatial transforma- tion for cross-embodiment dexterous grasping,” arXiv preprint arXiv:2510.12724, 2025
arXiv 2025
-
[43]
De- moGrasp: Universal dexterous grasping from a single demon- stration,
H. Yuan, Z. Huang, Y. Wang, C. Mao, C. Xu, and Z. Lu, “De- moGrasp: Universal dexterous grasping from a single demon- stration,” arXiv preprint arXiv:2509.22149 , 2025
arXiv 2025
-
[44]
Grasp2grasp: 16 Vision-based dexterous grasp translation via schrödinger bridges,
T. Zhong, J. Buchanan, and C. Allen-Blanchette, “Grasp2grasp: 16 Vision-based dexterous grasp translation via schrödinger bridges,” in The Thirty-Ninth Annual Conference on Neural Information Processing Systems (NeurIPS) , 2025
2025
-
[45]
Toward dexterous manipulation with augmented adaptive synergies: The pisa/iit softhand 2,
C. Della Santina, C. Piazza, G. Grioli, M. G. Catalano, and A. Bicchi, “Toward dexterous manipulation with augmented adaptive synergies: The pisa/iit softhand 2,” IEEE Transactions on Robotics, vol. 34, no. 5, pp. 1141–1156, 2018
2018
-
[46]
Nervenet: Learning structured policy with graph neural networks,
T. Wang, R. Liao, J. Ba et al. , “Nervenet: Learning structured policy with graph neural networks,” in International Conference on Learning Representations (ICLR) , 2018
2018
-
[47]
Graph-based policy for robot control,
W. Huang, I. Mordatch, and D. Pathak, “Graph-based policy for robot control,” in 2019 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, 2019
2019
-
[48]
Denoising diffusion probabilistic models,
J. Ho, A. Jain, and P. Abbeel, “Denoising diffusion probabilistic models,” in Advances in Neural Information Processing Sys- tems, vol. 33, 2020, pp. 6840–6851
2020
-
[49]
Score- based generative modeling through stochastic differential equa- tions,
Y. Song, J. Sohl-Dickstein, D. P. Kingma et al. , “Score- based generative modeling through stochastic differential equa- tions,” in International Conference on Learning Representa- tions (ICLR) , 2021
2021
-
[50]
Flow matching for generative modeling,
Y. Lipman, R. T. Chen, H. Ben-Hamu et al. , “Flow matching for generative modeling,” International Conference on Learning Representations (ICLR), 2023
2023
-
[51]
Flow straight and fast: Learning to generate and transfer data with rectified flow,
X. Liu, C. Gong, and Q. Liu, “Flow straight and fast: Learning to generate and transfer data with rectified flow,” International Conference on Learning Representations (ICLR) , 2022
2022
-
[52]
Building normal- izing flows with stochastic interpolants,
M. S. Albergo and E. Vanden-Eijnden, “Building normal- izing flows with stochastic interpolants,” arXiv preprint arXiv:2209.15571, 2023
Pith/arXiv arXiv 2023
-
[53]
Frog- ger: Fast robust grasp generation via the min-weight metric,
A. H. Li, P. Culbertson, J. W. Burdick, and A. D. Ames, “Frog- ger: Fast robust grasp generation via the min-weight metric,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2023, pp. 6809–6816
2023
-
[54]
Grasp as you say: Language- guided dexterous grasp generation,
Y.-L. Wei, J.-J. Jiang, C. Xing, X.-T. Tan, X.-M. Wu, H. Li, M. Cutkosky, and W.-S. Zheng, “Grasp as you say: Language- guided dexterous grasp generation,” in Advances in Neural In- formation Processing Systems , vol. 37, 2024, pp. 46 881–46 907
2024
-
[55]
HGDiffuser: Efficient task-oriented grasp generation via human-guided grasp diffusion models,
D. Huang, W. Dong, C. Tang, and H. Zhang, “HGDiffuser: Efficient task-oriented grasp generation via human-guided grasp diffusion models,” arXiv preprint arXiv:2503.00508 , 2025
arXiv 2025
-
[56]
Pointnet++: Deep hierarchical feature learning on point sets in a metric space,
C. R. Qi, L. Yi, H. Su, and L. J. Guibas, “Pointnet++: Deep hierarchical feature learning on point sets in a metric space,” in Advances in Neural Information Processing Systems , 2017
2017
-
[57]
Synergygrasp: A structure-aware synergy frame- work for multi-hand grasp generation,
W. Niu, H. Sun, Y. Rong, Z. Zhu, Y. Xie, H. Zhou, C. Zhuang, and F. Sun, “Synergygrasp: A structure-aware synergy frame- work for multi-hand grasp generation,” 2026, under review
2026
-
[58]
Grasp pose detection in point clouds,
A. ten Pas, M. Gualtieri, K. Saenko, and R. Platt, “Grasp pose detection in point clouds,” The International Journal of Robotics Research, vol. 36, no. 13-14, pp. 1455–1473, 2017
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.