Wind Gust Detection using Physical Sensors in Quadcopters
Pith reviewed 2026-05-25 18:40 UTC · model grok-4.3
The pith
Quadcopters can detect wind gust speed and direction from their existing IMU sensors after classifier training.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Wind speed can be detected with high accuracy after training, generalizing across different drones of the same class, while wind direction can be detected with high accuracy after training on the same drone but shows limited generalizability to other drones. Real-time detection of wind speed using offline trained models is feasible with high accuracy.
What carries the argument
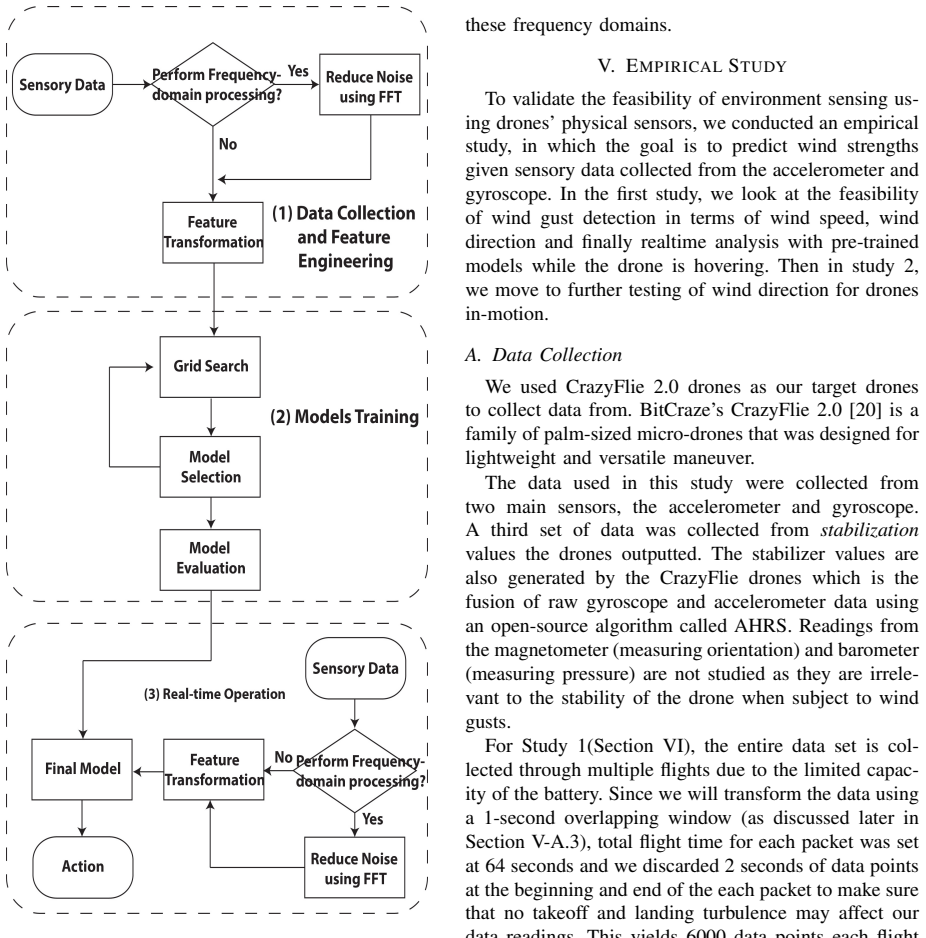
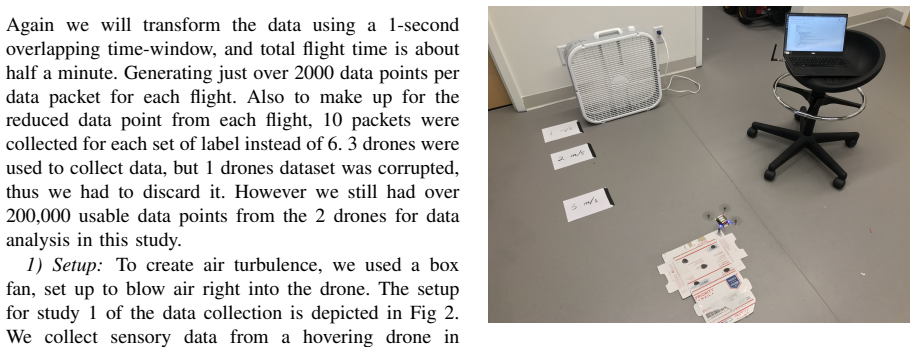
Off-the-shelf classifiers applied to accelerometer and gyroscope readings collected during hovering and low-speed motion near a fan.
If this is right
- Drones can adjust motor power in response to detected wind to maintain stable flight.
- Flight systems can steer the vehicle toward directions with lower detected wind.
- Real-time wind speed feedback can be added to existing control loops using only onboard sensors.
- Compensation for external disturbances becomes possible without extra hardware on the vehicle.
Where Pith is reading between the lines
- The same IMU data stream might be usable to detect other disturbances such as turbulence or payload shifts.
- Outdoor flight tests would be needed to check whether the indoor fan data generalizes to natural wind.
- The models could be combined with existing drone navigation software to alter planned paths based on wind readings.
Load-bearing premise
IMU patterns produced by a consumer fan inside a room match the patterns real outdoor wind gusts would produce on a flying drone.
What would settle it
Apply the trained models to IMU recordings from a drone flying in actual outdoor wind gusts and measure whether accuracy remains at the levels reported for the indoor fan tests.
Figures

read the original abstract
We propose the use of basic inertial measurement units (IMU) which contain sensors such as accelerometers and gyroscopes already on-board drones to detect the speed and direction of wind gusts. The ability to quickly sense wind gusts has many applications, the most notable of which is in flight assistance of the drone, where it may adjust motor power parameter to compensate for such external factors or steer the drone toward a safer direction. To illustrate the feasibility of the approach, we conducted studies to assess how reliably wind speed and wind direction can be detected while a quad-copter drone is hovering and then in-motion, using off-the-shelf classifiers. Empirical results with real-life data, collected on a micro aerial vehicle (MAV) in a physical room with a consumer-grade fan, show that (1.1) wind speed can be detected with high accuracy after training, not only on the same drone, but also across different drones of the same class, while (1.2) wind direction can be detected with high accuracy after training on the same drone, but with limited generalizability to other drones. (1.3) We demonstrate how real-time detection of wind speed, using offline trained models, is feasible and can be done with high accuracy. (2.1) Finally, we find the reason behind the lower accuracy for wind direction detection during the analysis of drones in-motion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that onboard IMU sensors (accelerometers and gyroscopes) on quadcopters can detect wind gust speed and direction using off-the-shelf classifiers. Indoor experiments with a consumer-grade fan on hovering and low-speed moving MAVs show high accuracy for speed detection both within and across drones of the same class, high accuracy for direction on the same drone (with limited cross-drone transfer), and feasible real-time speed detection with offline-trained models; lower direction accuracy in motion is analyzed.
Significance. If the fan-induced IMU signatures prove representative of real outdoor gusts, the work offers a low-cost, hardware-free approach to gust detection that could improve drone stability and safety. The reported cross-drone speed generalizability would be a practical strength for deployment on standard platforms.
major comments (3)
- [Abstract] Abstract and Experimental Setup: All reported accuracies rest on data collected indoors with a consumer-grade fan while the drone hovers or moves at low speeds. No outdoor flights, anemometer ground truth, spectral/turbulence comparison, or validation that fan airflow produces IMU disturbances matching natural gust frequency content or spatial uniformity are described. This assumption is load-bearing for the central claims of high-accuracy cross-drone speed detection and real-time feasibility.
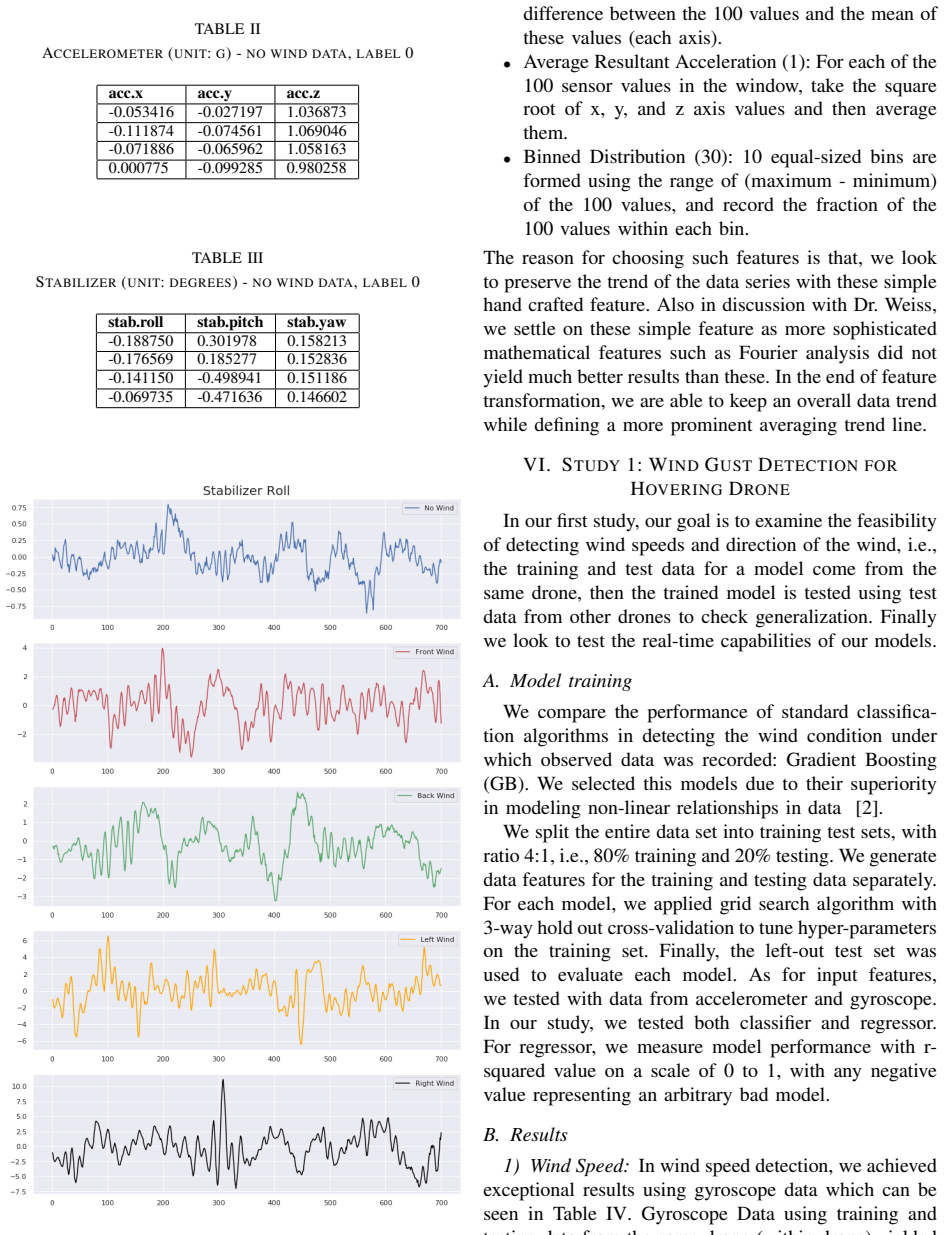
- [Abstract] Results section (empirical accuracy claims): The abstract states high accuracies for speed (same-drone and cross-drone) and direction (same-drone) but provides no details on data volume, cross-validation method, IMU feature extraction, class balance, or statistical significance. Without these, the reliability of the numerical results and the distinction between speed and direction generalizability cannot be assessed.
- [Analysis] Analysis of in-motion results: The manuscript notes lower direction accuracy during motion but does not quantify how motion-induced attitude changes interact with fan-induced accelerations or whether this interaction differs from expected outdoor gust behavior, weakening the explanation for the observed performance gap.
minor comments (2)
- [Methods] Clarify the exact IMU features fed to the classifiers and any preprocessing steps applied to the raw accelerometer/gyroscope signals.
- [Experimental Setup] Add a table or figure summarizing the number of samples, drones used, and train/test splits to support the cross-drone claims.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We respond point-by-point to the major comments below, indicating where revisions will be made to improve clarity and address limitations.
read point-by-point responses
-
Referee: [Abstract] Abstract and Experimental Setup: All reported accuracies rest on data collected indoors with a consumer-grade fan while the drone hovers or moves at low speeds. No outdoor flights, anemometer ground truth, spectral/turbulence comparison, or validation that fan airflow produces IMU disturbances matching natural gust frequency content or spatial uniformity are described. This assumption is load-bearing for the central claims of high-accuracy cross-drone speed detection and real-time feasibility.
Authors: We agree that the controlled indoor fan setup does not replicate the full spectral content, turbulence, or spatial uniformity of natural outdoor gusts, and the manuscript contains no outdoor flights or anemometer-based ground truth. The work is presented as a feasibility study demonstrating that IMU signatures can be used for classification under these conditions. We will revise the abstract and add an explicit limitations paragraph to state these assumptions, their implications for generalizability, and the need for future outdoor validation. revision: partial
-
Referee: [Abstract] Results section (empirical accuracy claims): The abstract states high accuracies for speed (same-drone and cross-drone) and direction (same-drone) but provides no details on data volume, cross-validation method, IMU feature extraction, class balance, or statistical significance. Without these, the reliability of the numerical results and the distinction between speed and direction generalizability cannot be assessed.
Authors: The full manuscript reports these details (dataset sizes, k-fold cross-validation, IMU feature sets, class distributions, and accuracy metrics with standard deviations) in the Experimental Setup and Results sections. To make the abstract self-contained, we will add a concise statement on data volume and validation method while retaining the high-level claims. revision: yes
-
Referee: [Analysis] Analysis of in-motion results: The manuscript notes lower direction accuracy during motion but does not quantify how motion-induced attitude changes interact with fan-induced accelerations or whether this interaction differs from expected outdoor gust behavior, weakening the explanation for the observed performance gap.
Authors: We will expand the analysis section with quantitative decomposition of IMU signals to separate attitude-induced components from fan-induced accelerations and will add discussion comparing these effects to expected outdoor gust behavior based on existing literature on MAV aerodynamics. revision: yes
- Outdoor validation against real gusts with anemometer ground truth and turbulence spectral analysis cannot be provided without new experiments outside the scope of a revision.
Circularity Check
No circularity: purely empirical classification on collected IMU data
full rationale
The paper reports accuracies from off-the-shelf classifiers trained and tested on IMU time-series collected indoors with a fan. No equations, first-principles derivations, or 'predictions' are claimed; results are direct empirical measurements. No self-citation chains, fitted parameters renamed as predictions, or self-definitional steps appear. The central mapping from fan-induced IMU signatures to 'wind gusts' is an external validity assumption, not a circular reduction within the reported pipeline.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption IMU accelerometer and gyroscope readings contain information sufficient to distinguish wind gust effects from other flight dynamics.
Reference graph
Works this paper leans on
-
[1]
Activity recognition from accelerometer data,
N. Ravi, N. Dandekar, P. Mysore, and M. L. Littman, “Activity recognition from accelerometer data,” in Proceedings of the 17th conference on Innovative applications of artificial intelligence- Volume 3. AAAI Press, 2005, pp. 1541–1546
work page 2005
-
[2]
Smartwatch-based activity recognition: A machine learning approach,
G. M. Weiss, J. L. Timko, C. M. Gallagher, K. Yoneda, and A. J. Schreiber, “Smartwatch-based activity recognition: A machine learning approach,” in Biomedical and Health Informatics (BHI), 2016 IEEE-EMBS International Conference on . IEEE, 2016, pp. 426–429
work page 2016
-
[3]
Cell phone-based biometric identification,
J. R. Kwapisz, G. M. Weiss, and S. A. Moore, “Cell phone-based biometric identification,” inBiometrics: Theory Applications and Systems (BTAS), 2010 Fourth IEEE International Conference on. IEEE, 2010, pp. 1–7
work page 2010
-
[4]
Smartwatch-based biometric gait recognition,
A. H. Johnston and G. M. Weiss, “Smartwatch-based biometric gait recognition,” inBiometrics Theory, Applications and Systems (BTAS), 2015 IEEE 7th International Conference on . IEEE, 2015, pp. 1–6
work page 2015
-
[5]
An eval- uation of wearable activity monitoring devices,
F. Guo, Y . Li, M. S. Kankanhalli, and M. S. Brown, “An eval- uation of wearable activity monitoring devices,” in Proceedings of the 1st ACM international workshop on Personal data meets distributed multimedia. ACM, 2013, pp. 31–34
work page 2013
-
[6]
Accurate figure flying with a quadrocopter using onboard visual and inertial sensing,
J. Engel, J. Sturm, and D. Cremers, “Accurate figure flying with a quadrocopter using onboard visual and inertial sensing,” Imu, vol. 320, p. 240, 2012
work page 2012
-
[7]
Learning monocular reac- tive uav control in cluttered natural environments,
S. Ross, N. Melik-Barkhudarov, K. S. Shankar, A. Wendel, D. Dey, J. A. Bagnell, and M. Hebert, “Learning monocular reac- tive uav control in cluttered natural environments,” in Robotics and Automation (ICRA), 2013 IEEE International Conference on. IEEE, 2013, pp. 1765–1772
work page 2013
-
[8]
T. Mori and S. Scherer, “First results in detecting and avoiding frontal obstacles from a monocular camera for micro unmanned aerial vehicles,” in Robotics and automation (icra), 2013 ieee international conference on . IEEE, 2013, pp. 1750–1757
work page 2013
-
[9]
Obstacle avoidance based-visual navigation for micro aerial vehicles,
W. G. Aguilar, V . P. Casaliglla, and J. L. P ´olit, “Obstacle avoidance based-visual navigation for micro aerial vehicles,” Electronics, vol. 6, no. 1, p. 10, 2017
work page 2017
-
[10]
A. Benini, A. Mancini, and S. Longhi, “An imu/uwb/vision- based extended kalman filter for mini-uav localization in indoor environment using 802.15. 4a wireless sensor network,” Journal of Intelligent & Robotic Systems , vol. 70, no. 1-4, pp. 461–476, 2013
work page 2013
-
[11]
K. McGuire, G. de Croon, C. De Wagter, K. Tuyls, and H. Kappen, “Efficient optical flow and stereo vision for velocity estimation and obstacle avoidance on an autonomous pocket drone,” IEEE Robotics and Automation Letters , vol. 2, no. 2, pp. 1070–1076, 2017
work page 2017
-
[12]
Gas-drone: Portable gas sensing system on uavs for gas leakage localization,
M. Rossi, D. Brunelli, A. Adami, L. Lorenzelli, F. Menna, and F. Remondino, “Gas-drone: Portable gas sensing system on uavs for gas leakage localization,” in SENSORS, 2014 IEEE . IEEE, 2014, pp. 1431–1434
work page 2014
-
[13]
Autonomous gas detection and mapping with unmanned aerial vehicles,
M. Rossi and D. Brunelli, “Autonomous gas detection and mapping with unmanned aerial vehicles,” IEEE Transactions on Instrumentation and Measurement , vol. 65, no. 4, pp. 765–775, 2016
work page 2016
-
[14]
Dynamic control of autonomous quadrotor flight in an estimated wind field,
N. Sydney, B. Smyth, and D. A. Paley, “Dynamic control of autonomous quadrotor flight in an estimated wind field,” in De- cision and Control (CDC), 2013 IEEE 52nd Annual Conference on. IEEE, 2013, pp. 3609–3616
work page 2013
-
[15]
Gust disturbance alleviation with incremental nonlinear dynamic inversion,
E. J. Smeur, G. C. de Croon, and Q. Chu, “Gust disturbance alleviation with incremental nonlinear dynamic inversion,” in Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ Inter- national Conference on . IEEE, 2016, pp. 5626–5631
work page 2016
-
[16]
J. Paneque-G ´alvez, M. K. McCall, B. M. Napoletano, S. A. Wich, and L. P. Koh, “Small drones for community-based forest monitoring: An assessment of their feasibility and potential in tropical areas,” Forests, vol. 5, no. 6, pp. 1481–1507, 2014
work page 2014
-
[17]
Coastal and environmental remote sensing from unmanned aerial vehicles: An overview,
V . V . Klemas, “Coastal and environmental remote sensing from unmanned aerial vehicles: An overview,” Journal of Coastal Research, vol. 31, no. 5, pp. 1260–1267, 2015. 9
work page 2015
-
[18]
Drone remote sensing for forestry research and practices,
L. Tang and G. Shao, “Drone remote sensing for forestry research and practices,” Journal of Forestry Research, vol. 26, no. 4, pp. 791–797, 2015
work page 2015
-
[19]
Low airspeed measuring devices for helicopter usage monitoring,
C. G. Knight, “Low airspeed measuring devices for helicopter usage monitoring,” DEFENCE SCIENCE AND TECHNOLOGY ORGANISATION VICTORIA (AUSTRALIA) PLATFORM , Tech. Rep., 2003
work page 2003
-
[20]
Bitcraze AB, “Crazyflie 2.0,” 2016. [Online]. Available: https://www.bitcraze.io/crazyflie-2/ 10
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.