A Stochastic Birth-and-Death Approach for Street Furniture Geolocation in Urban Environments
Pith reviewed 2026-05-21 21:49 UTC · model grok-4.3
The pith
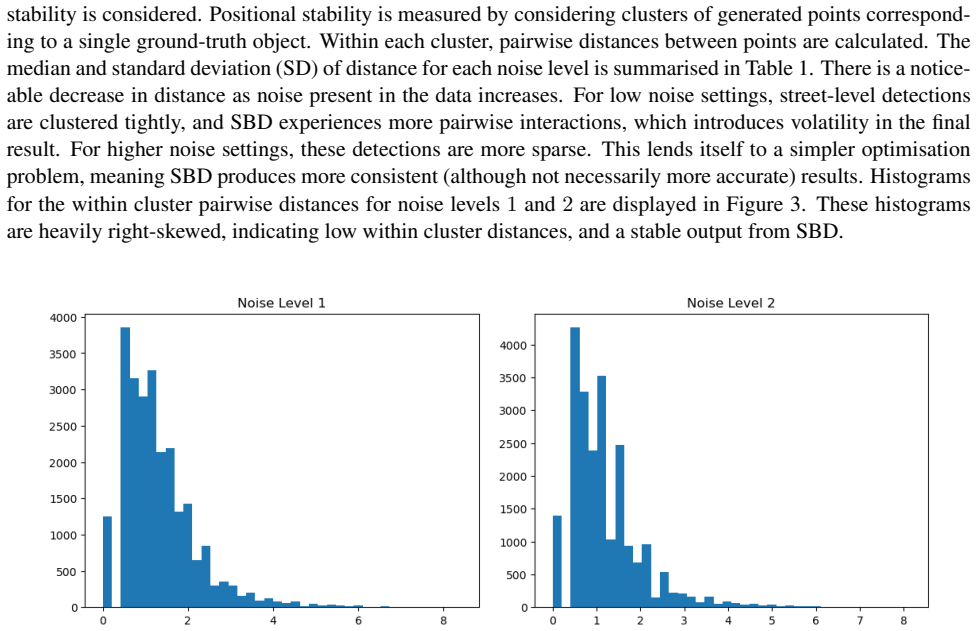
A stochastic birth-and-death algorithm infers the most probable configuration of street furniture from energy maps.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By representing spatial likelihoods as energy maps in geopositioned format and running a stochastic birth-and-death optimisation algorithm, the approach infers the single most probable configuration of street-furniture assets while incorporating external geospatial constraints such as GIS layers and road maps.
What carries the argument
The stochastic birth-and-death optimisation algorithm, which proposes births (adding candidate asset positions) and deaths (removing them) to explore and converge on the configuration of highest probability under the energy map.
If this is right
- Localisation accuracy improves because placement constraints and road networks are enforced during optimisation rather than applied afterward.
- The number of assets need not be known in advance, since births and deaths let the configuration size adjust itself.
- Multiple data sources can be fused at the map level before optimisation begins, reducing the need for separate post-processing steps.
- The same framework can produce updated maps whenever new imagery or GIS updates become available.
Where Pith is reading between the lines
- The same energy-map plus birth-and-death structure could locate other fixed urban objects whose counts are also unknown in advance.
- Errors in the initial energy maps would directly limit final accuracy, suggesting that improving map construction is a natural next bottleneck to address.
- Because the optimisation is stochastic, repeated runs on identical inputs could be used to estimate configuration uncertainty for risk-aware maintenance planning.
Load-bearing premise
Energy maps stored in map-based geopositioned format let the optimisation process integrate external geospatial information such as GIS layers and placement constraints without loss of accuracy or compatibility.
What would settle it
Applying the algorithm to the Dublin city-centre street-lighting simulation and measuring that the recovered asset configurations deviate substantially from the known ground-truth positions when external constraints are included.
Figures
read the original abstract
In this paper we address the problem of precise geolocation of street furniture in complex urban environments, which is a critical task for effective monitoring and maintenance of public infrastructure by local authorities and private stakeholders. To this end, we propose a probabilistic framework based on energy maps that encode the spatial likelihood of object locations. Representing the energy in a map-based geopositioned format allows the optimisation process to seamlessly integrate external geospatial information, such as GIS layers, road maps, or placement constraints, which improves contextual awareness and localisation accuracy. A stochastic birth-and-death optimisation algorithm is introduced to infer the most probable configuration of assets. We evaluate our approach using a realistic simulation informed by a geolocated dataset of street lighting infrastructure in Dublin city centre, demonstrating its potential for scalable and accurate urban asset mapping. The implementation of the algorithm will be made available in the GitHub repository https://github.com/EMurphy0108/SBD_Street_Furniture.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a probabilistic framework for geolocating street furniture in urban environments. Energy maps in geopositioned format encode spatial likelihoods and enable integration of GIS layers, road maps, and placement constraints. A stochastic birth-and-death optimization algorithm is introduced to recover the most probable asset configuration. The method is evaluated on a simulation derived from a geolocated street-lighting dataset in Dublin city centre, with code promised on GitHub.
Significance. If the birth-and-death process can be shown to converge to the MAP configuration of the posterior induced by the energy maps while respecting hard geospatial constraints, the framework would supply a flexible mechanism for incorporating external GIS data into urban asset mapping, offering a scalable alternative to purely data-driven or manual approaches.
major comments (2)
- [Proposed method] The manuscript supplies no explicit functional form for the energy function that defines the target distribution, nor any statement of the birth and death intensity functions or the Metropolis-Hastings acceptance ratio. Without these, it is impossible to verify that the stochastic process targets the claimed posterior or satisfies detailed balance (see the paragraph introducing the stochastic birth-and-death optimisation algorithm).
- [Energy maps and geospatial integration] The claim that map-based energy representation permits seamless integration of GIS layers and hard placement constraints is unsupported by any description of how constraints enter the proposal distribution or the energy (rejection sampling, modified intensities, or soft penalties). This detail is load-bearing for the assertion that sampled configurations remain valid under urban road-boundary rules (see the paragraph on energy-map representation).
minor comments (2)
- [Experiments] The simulation-based evaluation is described only at a high level; no numerical error metrics, convergence diagnostics, ablation on constraint handling, or comparison against baseline geolocation methods are reported.
- [Implementation] The GitHub repository link is given but the manuscript contains no description of the code structure, input data format, or instructions for reproducing the Dublin simulation.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed review. The comments highlight important areas where the manuscript requires greater mathematical precision to substantiate the claims. We address each point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Proposed method] The manuscript supplies no explicit functional form for the energy function that defines the target distribution, nor any statement of the birth and death intensity functions or the Metropolis-Hastings acceptance ratio. Without these, it is impossible to verify that the stochastic process targets the claimed posterior or satisfies detailed balance (see the paragraph introducing the stochastic birth-and-death optimisation algorithm).
Authors: We agree that the explicit functional forms are necessary for rigorous verification. The original manuscript described the energy function and birth-and-death process at a conceptual level to emphasize the overall framework. In the revision we will insert the precise mathematical definitions: the energy function E(x) = -log p(x|data, constraints), the birth intensity λ_b(x) and death intensity λ_d(x) derived from the energy map, and the Metropolis-Hastings acceptance ratio that ensures detailed balance with respect to the target posterior. These additions will confirm convergence to the MAP configuration while respecting the hard geospatial constraints. revision: yes
-
Referee: [Energy maps and geospatial integration] The claim that map-based energy representation permits seamless integration of GIS layers and hard placement constraints is unsupported by any description of how constraints enter the proposal distribution or the energy (rejection sampling, modified intensities, or soft penalties). This detail is load-bearing for the assertion that sampled configurations remain valid under urban road-boundary rules (see the paragraph on energy-map representation).
Authors: We acknowledge that the mechanism for enforcing hard constraints was described only at a high level. In the revised manuscript we will explicitly state that road-boundary and placement constraints are incorporated by (i) modulating the birth intensity function to zero outside permitted regions and (ii) applying rejection sampling on proposals that violate hard GIS rules. This ensures all sampled configurations remain valid without relying on soft penalties alone, directly supporting the claim of seamless geospatial integration. revision: yes
Circularity Check
No significant circularity; derivation remains self-contained
full rationale
The paper presents a probabilistic framework using energy maps in geopositioned format and introduces a stochastic birth-and-death optimisation algorithm to infer the most probable asset configuration. No explicit equations, energy functions, birth/death intensity functions, or fitted parameters are quoted or described in the provided abstract and text excerpts. No self-definitional reductions, fitted inputs renamed as predictions, or load-bearing self-citations appear. The evaluation on a Dublin simulation dataset is presented as external validation rather than a closed loop. The derivation chain is therefore independent of its inputs by construction and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Energy maps encode the spatial likelihood of object locations and can be represented in geopositioned format to integrate GIS layers and placement constraints.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
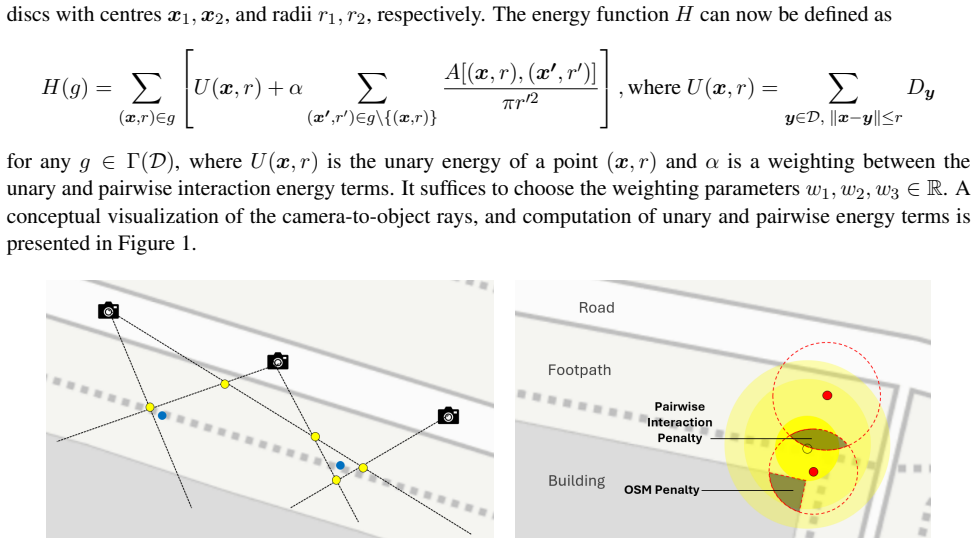
A stochastic birth-and-death optimisation algorithm is introduced to infer the most probable configuration of assets... energy function H: Γ(V)→R... unary term U(x,r) and pairwise interaction term I(x,r;g)
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
PGibbs(g;β)=1/Z e^{-β H(g)} ... as β→∞ ... converge weakly to the distribution of global minimisers
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Descombes, X., Minlos, R., and Zhizhina, E. (2009). Object extraction using a stochastic birth-and-death dynamics in continuum. Journal of Mathematical Imaging and Vision , 33(3):347--359
work page 2009
-
[2]
Data.gov.ie, dublin city council, public lighting
Dublin City Council (2021). Data.gov.ie, dublin city council, public lighting. https://data.gov.ie/dataset/street-lighting-dublin-city. Accessed: May 2025
work page 2021
-
[3]
Krylov, V. A., Kenny, E., and Dahyot, R. (2018). Automatic discovery and geotagging of objects from street view imagery. Remote Sensing , 10(5):661
work page 2018
-
[4]
D., Produit, T., and Nassar, A
Lefevre, S., Tuia, D., Wegner, J. D., Produit, T., and Nassar, A. S. (2017). Toward seamless multiview scene analysis from satellite to street level. Proceedings of the IEEE , 105(10):1884--1899
work page 2017
-
[5]
J., Ulicny, M., Manzke, M., and Dahyot, R
Liu, C. J., Ulicny, M., Manzke, M., and Dahyot, R. (2021). Context aware object geotagging. In Irish Machine Vision and Image Processing Conference , pages 65--72
work page 2021
-
[6]
Mabon, J., Ortner, M., and Zerubia, J. (2024). Learning point processes and convolutional neural networks for object detection in satellite images. Remote Sensing , 16(6):1019
work page 2024
-
[7]
Sun, Y., Ye, Y., Kang, J., Fernandez-Beltran, R., Feng, S., Li, X., Luo, C., Zhang, P., and Plaza, A. (2023). Cross-view object geo-localization in a local region with satellite imagery. IEEE Transactions on Geoscience and Remote Sensing , 61:1--16
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.