Diffusion-Based Stochastic Operator Networks for Uncertainty Quantification in Stochastic Partial Differential Equations
Pith reviewed 2026-05-20 14:57 UTC · model grok-4.3
The pith
Stochastic Operator Networks learn solution operators for SPDEs and quantify uncertainty directly from noisy data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
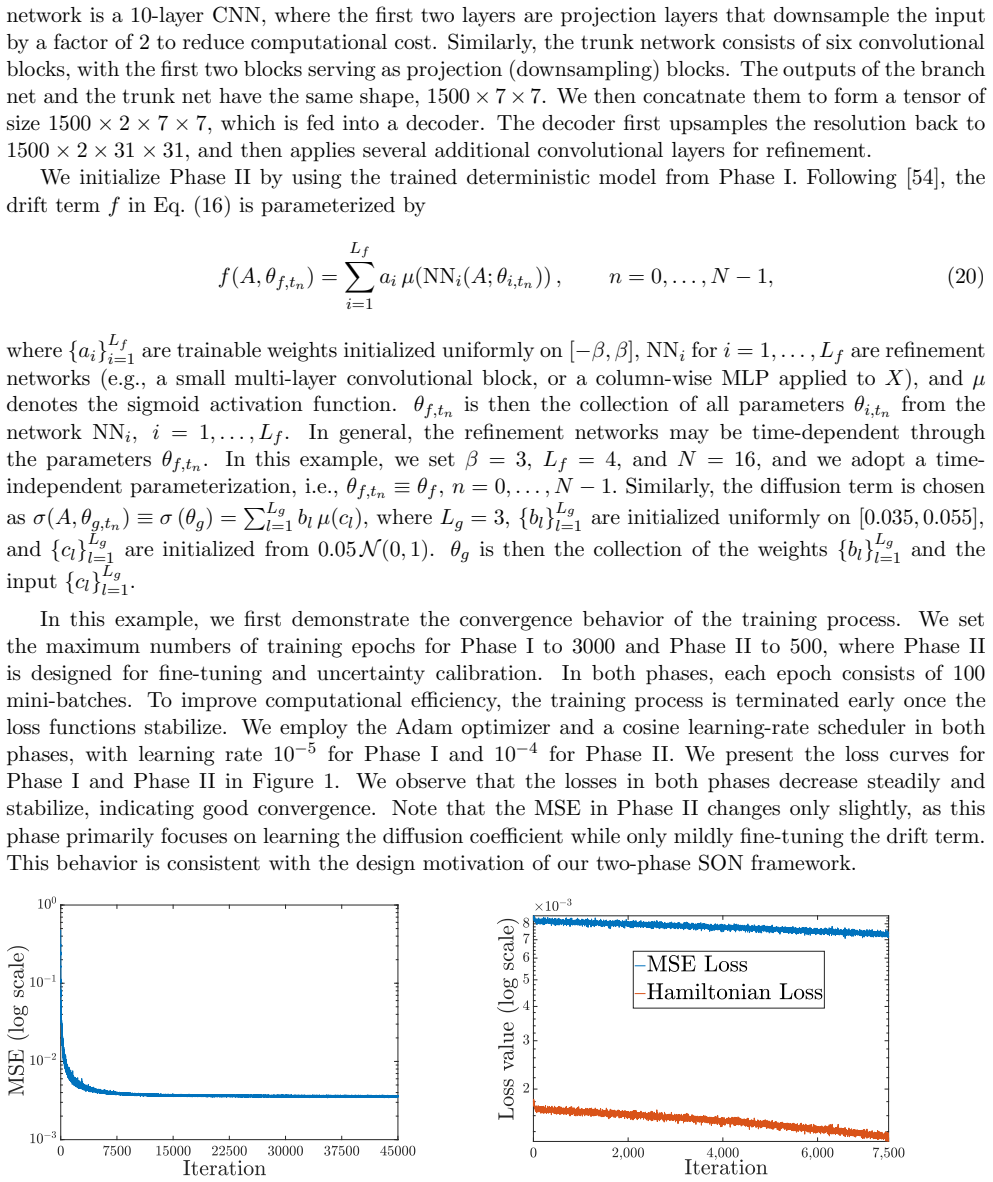
The Stochastic Operator Network is formed by combining the Deep Operator Network structure with Stochastic Neural Networks to model stochasticity and enable probabilistic predictions of SPDE solution operators. Training proceeds by minimizing a Hamiltonian-type loss and optimizing the objective with the Stochastic Maximum Principle. Numerical experiments on benchmark SPDEs with multiple uncertainty sources show the approach captures solution structure and quantifies predictive uncertainty accurately and robustly.
What carries the argument
The Stochastic Operator Network (SON), which merges the DeepONet architecture with Stochastic Neural Networks and trains via minimization of a Hamiltonian-type loss using the Stochastic Maximum Principle.
If this is right
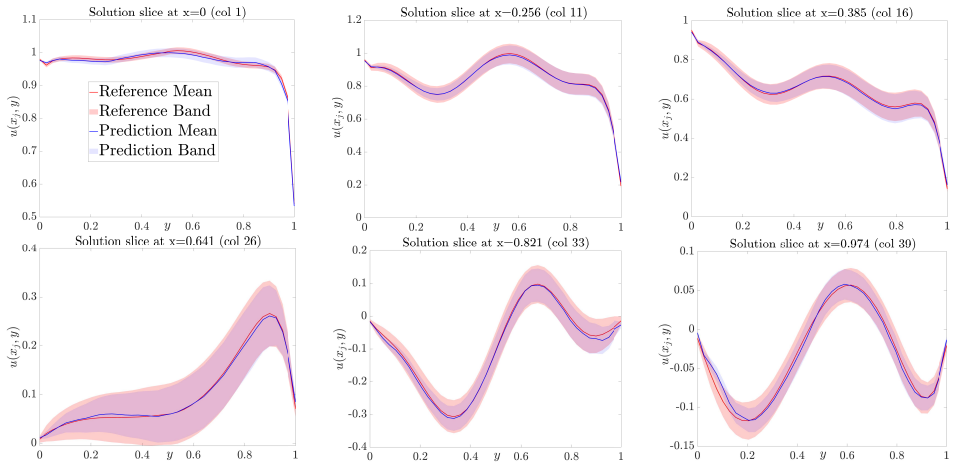
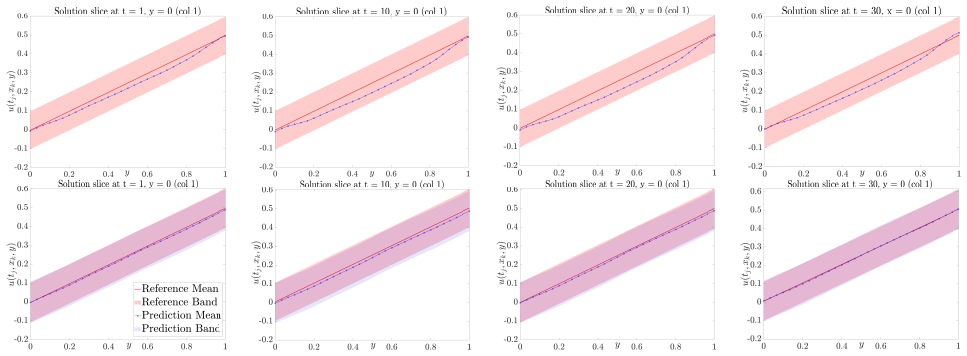
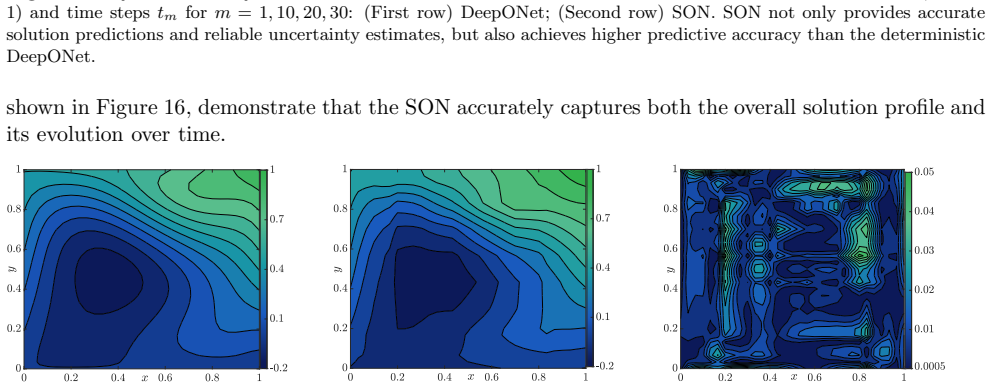
- The method produces accurate mean solution fields on standard SPDE test problems.
- It quantifies predictive uncertainty reliably when multiple sources of uncertainty are present.
- It operates directly on noisy measurements without requiring a separate noise model to be supplied.
Where Pith is reading between the lines
- The same architecture might be tested on inverse problems where the goal is to infer uncertain parameters from observations.
- Extensions could examine performance on SPDEs with non-Gaussian or spatially correlated noise.
- Integration with existing physics-informed neural network techniques could further constrain the learned operators.
Load-bearing premise
That combining DeepONet with stochastic neural networks and training through a Hamiltonian loss optimized by the Stochastic Maximum Principle yields well-calibrated uncertainty estimates that generalize across different SPDE problems without an explicit noise model.
What would settle it
Apply the trained SON to a new benchmark SPDE whose true noise statistics are known, then check whether the predicted uncertainty bands contain the actual solution errors at the claimed rate, for instance whether 95 percent intervals contain the true errors in 95 percent of cases.
Figures



















read the original abstract
We introduce a novel framework for uncertainty quantification of solution operators associated with stochastic partial differential equations (SPDEs). Although SPDEs play a central role in modeling complex physical systems under uncertainty, their practical use typically requires specifying the magnitude and structure of model uncertainties that are often unknown and difficult to infer from noisy measurements. To address this challenge, we develop a stochastic operator-learning framework that learns directly from noisy data and outputs both a mean solution field and a quantification of uncertainty. The proposed method, namely the Stochastic Operator Network (SON), is constructed by combining the structure of the Deep Operator Network (DeepONet) with Stochastic Neural Networks (SNNs) to model stochasticity and enable probabilistic prediction. The training procedure is carried out by minimizing a Hamiltonian-type loss and optimizing the resulting objective using the Stochastic Maximum Principle. Numerical experiments on benchmark SPDEs under multiple uncertainty sources demonstrate the accuracy and robustness of the proposed method in capturing solution structure and quantifying predictive uncertainty.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Stochastic Operator Network (SON) for uncertainty quantification in SPDEs. It combines the DeepONet architecture with Stochastic Neural Networks to model stochasticity, and trains the model by minimizing a Hamiltonian-type loss optimized via the Stochastic Maximum Principle. This allows learning both mean solution operators and predictive uncertainty directly from noisy data without an explicit noise model. Numerical experiments on benchmark problems such as the stochastic heat equation and Burgers equation under multiple uncertainty sources are used to demonstrate accuracy in capturing solution structure and robustness in uncertainty quantification.
Significance. If the central claim holds, the framework would offer a practical advance in operator learning for SPDEs by enabling data-driven UQ when noise structure is unknown, which is common in physical modeling. The integration of DeepONet with SNNs and SMP-based optimization is a novel technical contribution to probabilistic operator networks. The work is grounded in learning from data rather than assuming a specific noise law, which aligns with real-world needs.
major comments (2)
- [Numerical Experiments] Numerical Experiments section: results are limited to pointwise errors and visual uncertainty bands on standard benchmarks; no proper scoring rules, coverage probabilities, calibration plots, or out-of-distribution tests (e.g., deliberately changing from additive to multiplicative noise) are reported. This leaves the claim of well-calibrated predictive uncertainty without formal verification.
- [Method] Method and Experiments: the implicit assumption that SNN stochasticity optimized under the SMP-derived Hamiltonian loss recovers accurate posterior predictive distributions for unknown noise structures is load-bearing for the central claim, yet no sensitivity analysis or formal checks against violated modeling assumptions are provided.
minor comments (2)
- [Numerical Experiments] Add explicit details on data splits, training/validation/test ratios, and any error bars or statistical significance measures for the reported errors.
- [Related Work] Clarify notation for the stochastic components in the SON architecture relative to prior stochastic DeepONet variants.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments identify opportunities to strengthen the empirical validation of uncertainty calibration and to provide additional robustness checks. We address each major comment below and describe the revisions we will implement.
read point-by-point responses
-
Referee: [Numerical Experiments] Numerical Experiments section: results are limited to pointwise errors and visual uncertainty bands on standard benchmarks; no proper scoring rules, coverage probabilities, calibration plots, or out-of-distribution tests (e.g., deliberately changing from additive to multiplicative noise) are reported. This leaves the claim of well-calibrated predictive uncertainty without formal verification.
Authors: We agree that the current numerical results rely primarily on pointwise errors and visual inspection of uncertainty bands. To provide a more rigorous assessment of calibration, we will augment the Numerical Experiments section with the Continuous Ranked Probability Score (CRPS), empirical coverage probabilities at multiple nominal levels, and reliability (calibration) diagrams. We will also add an out-of-distribution experiment that deliberately changes the noise structure (additive to multiplicative) on the stochastic heat and Burgers equations. These additions will be included in the revised manuscript. revision: yes
-
Referee: [Method] Method and Experiments: the implicit assumption that SNN stochasticity optimized under the SMP-derived Hamiltonian loss recovers accurate posterior predictive distributions for unknown noise structures is load-bearing for the central claim, yet no sensitivity analysis or formal checks against violated modeling assumptions are provided.
Authors: The Stochastic Maximum Principle supplies a principled optimality condition for the Hamiltonian loss that enables learning without an explicit parametric noise model; this is the theoretical motivation for the framework. Nevertheless, we recognize that empirical sensitivity checks are important for practical credibility. In the revised manuscript we will add a dedicated sensitivity study that perturbs the noise structure and distribution during training and reports the resulting changes in predictive mean and uncertainty metrics. These results will be presented alongside the existing benchmark experiments. revision: yes
Circularity Check
No circularity: method is a data-driven combination of architectures with external benchmark validation
full rationale
The paper presents a Stochastic Operator Network formed by combining DeepONet with Stochastic Neural Networks, trained via a Hamiltonian-type loss derived from the Stochastic Maximum Principle. This is a constructive modeling choice applied to noisy data, followed by numerical experiments on standard SPDE benchmarks. No step reduces a claimed prediction to a fitted input by construction, invokes a self-citation as the sole justification for uniqueness, or renames an empirical pattern as a first-principles result. The derivation chain remains self-contained because the architecture and loss are explicitly assembled from known components and then evaluated against independent benchmark problems rather than being tautological with the training data.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The Hamiltonian-type loss combined with the Stochastic Maximum Principle yields a well-defined optimization problem whose solution corresponds to accurate mean and uncertainty estimates for the SPDE solution operator.
invented entities (1)
-
Stochastic Operator Network (SON)
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The training procedure is carried out by minimizing a Hamiltonian-type loss and optimizing the resulting objective using the Stochastic Maximum Principle.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Numerical experiments on benchmark SPDEs under multiple uncertainty sources demonstrate the accuracy and robustness
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
R. Abgrall and P. M. Congedo. A semi-intrusive determini stic approach to uncertainty quantifica- tion in non-linear fluid flow problems. Journal of Computational Physics , 235:828–845, 2013
work page 2013
-
[2]
R. Abgrall and S. Tokareva. The stochastic finite volume m ethod. In S. Jin and L. Pareschi, editors, Uncertainty Quantification for Hyperbolic and Kinetic Equa tions, pages 1–57. Springer International Publishing, Cham, 2017
work page 2017
- [3]
-
[4]
R. Archibald and F. Bao. Kernel learning backward sde filt er for data assimilation. J. Comput. Phys., 455(3):111009, 2022
work page 2022
-
[5]
R. Archibald, F. Bao, Y. Cao, and H. Sun. Numerical analys is for convergence of a sample-wise backpropagation method for training stochastic neural net works. SIAM Journal on Numerical Analysis, 62(2):593–621, 2024
work page 2024
-
[6]
R. Archibald, F. Bao, Y. Cao, and H. Zhang. A backward sde m ethod for uncertainty quantification in deep learning. Discrete and Continuous Dynamical Systems - S , 15(10):2807–2835, 2022
work page 2022
-
[7]
R. Archibald, F. Bao, and J. Yong. A stochastic gradient d escent approach for stochastic optimal control. East Asian Journal on Applied Mathematics , 10(4):635–658, 2020
work page 2020
-
[8]
R. Archibald, F. Bao, J. Yong, and T. Zhou. An efficient nume rical algorithm for solving data driven feedback control problems. Journal of Scientific Computing , 85(51), 2020
work page 2020
-
[9]
F. Bao, Y. Cao, A. Meir, and W. Zhao. A first order scheme for backward doubly stochastic differential equations. SIAM/ASA Journal on Uncertainty Quantification , 4(1):413–445, 2016
work page 2016
-
[10]
F. Bao, Y. Cao, and J. Yong. Data informed solution estim ation for forward-backward stochastic differential equations. Analysis and Applications , 19(3):439–464, 2021. 27
work page 2021
-
[11]
L´ evy backward sde filter for jump diffusion processes and its applications in material sciences
Feng Bao, Richard Archibald, and Peter Maksymovych. L´ evy backward sde filter for jump diffusion processes and its applications in material sciences. Communications in Computational Physics , 27(2):589–618, Dec. 2019
work page 2019
-
[12]
Feng Bao, Yanzhao Cao, and Hongmei Chi. Adjoint forward backward stochastic differential equations driven by jump diffusion processes and its applicat ion to nonlinear filtering problems. International Journal for Uncertainty Quantification , 9(2):143–159, 2019
work page 2019
-
[13]
Feng Bao, Yanzhao Cao, Clayton Webster, and Guannan Zha ng. A hybrid sparse-grid approach for nonlinear filtering problems based on adaptive-domain o f the zakai equation approximations. SIAM/ASA Journal on Uncertainty Quantification , 2(1):784–804, 2014
work page 2014
-
[14]
Feng Bao, Yanzhao Cao, and Weidong Zhao. Numerical solu tions for forward backward doubly stochastic differential equations and zakai equations. Visualization of Mechanical Processes: An International Online Journal , 1(4):351–367, 2011
work page 2011
-
[15]
A first order sem i-discrete algorithm for backward dou- bly stochastic differential equations
Feng Bao, Yanzhao Cao, and Weidong Zhao. A first order sem i-discrete algorithm for backward dou- bly stochastic differential equations. Discrete and Continuous Dynamical Systems - B , 20(5):1297– 1313, 2015
work page 2015
-
[16]
Adaptive meshfree bac kward sde filter
Feng Bao and Vasileios Maroulas. Adaptive meshfree bac kward sde filter. SIAM Journal on Scientific Computing , 39(6):A2664–A2683, 2017
work page 2017
-
[17]
D. A. Barajas-Solano and D. M. Tartakovsky. Stochastic collocation methods for nonlinear parabolic equations with random coefficients. SIAM/ASA Journal on Uncertainty Quantification , 4(1):475–494, 2016
work page 2016
-
[18]
T. Barth. On the propagation of statistical model param eter uncertainty in cfd calculations. Theoretical and Computational Fluid Dynamics , 26(5):435–457, 2012
work page 2012
-
[19]
R. Bausback, J. Tang, Lu Lu, F. Bao, and P-.T. Huynh. Stoc hastic operator network: A stochastic maximum principle based approach to operator learning. Journal of Machine Learning , 2026
work page 2026
-
[20]
K. Bhattacharya, B. Hosseini, N. B. Kovachki, and A. M. S tuart. Model reduction and neural networks for parametric pdes. The SMAI Journal of computational mathematics , 7:121–157, 2021
work page 2021
- [21]
-
[22]
F. Brunner, A. F. Radu, and P. Knabner. Analysis of an upw ind-mixed hybrid finite element method for transport problems. SIAM Journal on Numerical Analysis , 52(1):83–102, 2014
work page 2014
-
[23]
B. Chen, C. Wang, W. Li, and H. Fu. A hybrid decoder-deepo net operator regression framework for unaligned observation data. Physics of Fluids , 36(2):027132, 2 2024
work page 2024
-
[24]
R.T. Q. Chen, Y. Rubanova, J. Bettencourt, and D. Duvena ud. Neural ordinary differential equa- tions. In Proceedings of the 32nd International Conference on Neural Inf ormation Processing Sys- tems, NIPS’18, page 6572–6583, Red Hook, NY, USA, 2018. Curran As sociates Inc
work page 2018
-
[25]
T. Chen and H. Chen. Universal approximation to nonline ar operators by neural networks with arbitrary activation functions and its application to dyna mical systems. IEEE transactions on neural netwrosk, 6(4):911–917, 1995. 28
work page 1995
-
[26]
B. Cockburn and C.-W. Shu. The runge-kutta local projec tion-discontinuous-galerkin finite element method for scalar conservation laws. ESAIM: Math. Model. Numer. Anal. , 25(3):337–361, 1991
work page 1991
- [27]
-
[28]
W. H. Fleming and R. W. Rishel. Deterministic and Stochastic Optimal Control , volume 1 of Applications of Mathematics . Springer, New York, 1975
work page 1975
-
[29]
W. H. Fleming and H. M. Soner. Controlled Markov Processes and Viscosity Solutions , volume 25 of Stochastic Modelling and Applied Probability . Springer, New York, 2 edition, 2006
work page 2006
- [30]
-
[31]
R. Gerstberger and P. Rentrop. Feedforward neural nets as discretization schemes for odes and daes. J. Comput. Appl. Math. , 82:117–128, 1997
work page 1997
-
[32]
S. Gottlieb and C.-W. Shu. Total variation diminishing runge-kutta schemes. Math. Comp. , 67(221):73–85, 1998
work page 1998
-
[33]
L. Guo, H. Wu, Y. Wang, W. Zhou, and T. Zhou. Ib-uq: Inform ation bottleneck based uncertainty quantification for neural function regression and neural op erator learning. Journal of Computational Physics, 510:113089, 2024
work page 2024
-
[34]
E. Haber and L. Ruthotto. Stable architectures for deep neural networks. Inverse Problems , 34:014004, 2018
work page 2018
-
[35]
J. J. Harmon, S. Tokareva, A. Zlotnik, and P. J. Swart. Ad aptive uncertainty quantification for stochastic hyperbolic conservation laws. SIAM/ASA Journal on Uncertainty Quantification , 13(2):339–374, 2025
work page 2025
-
[36]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learnin g for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recogniti on, pages 770–778, 2016
work page 2016
-
[37]
K. He, X. Zhang, S. Ren, and J. Sun. Identity mappings in d eep residual networks. In European Conference on Computer Vision , pages 630–645. Springer, 2016
work page 2016
- [38]
-
[39]
J. Jung, H. Shin, and M. Choi. Bayesian deep learning fra mework for uncertainty quantification in stochastic partial differential equations. SIAM Journal on Scientific Computing , 46(1):C57–C76, 2024
work page 2024
-
[40]
O.M. Knio and O.P. Le Ma ˆ ıtre. Uncertainty propagation in cfd using polynomial chaos decom- position. Fluid Dynamics Research , 38(9):616–640, 2006. Recent Topics in Computational Flui d Dynamics
work page 2006
-
[41]
L. Kong, J. Sun, and C. Zhang. SDE-Net: Equipping deep ne ural networks with uncertainty estimates. In Proceedings of the 37th International Conference on Machine L earning, volume 119 of Proceedings of Machine Learning Research , pages 5405–5415, 2020. 29
work page 2020
-
[42]
Assimilating partial observation to enhance feedback control of stochastic dyna mical systems
Siming Liang, Ruoyu Hu, Feng Bao, Richard Archibald, an d Guannan Zhang. Assimilating partial observation to enhance feedback control of stochastic dyna mical systems. Foundations of Data Science, 9:1–33, 2026
work page 2026
-
[43]
Convergence analysis for an online data-driven feedback control algorithm
Siming Liang, Hui Sun, Richard Archibald, and Feng Bao. Convergence analysis for an online data-driven feedback control algorithm. Mathematics (2227-7390) , 12(16), 2024
work page 2024
-
[44]
G. Lin, C. Moya, and Z. Zhang. B-deeponet: An enhanced ba yesian deeponet for solving noisy para- metric pdes using accelerated replica exchange sgld. Journal of Computational Physics , 473:111713, 2023
work page 2023
-
[45]
X. Liu, T. Xiao, S. Si, Q. Cao andS. K. Kumar, and C.-J. Hsi eh. Neural sde: Stabilizing neural ode networks with stochastic noise. arXiv preprint, 2019
work page 2019
-
[46]
L. Lu, , G. Pang, P. Jin, Z. Zhang, and G. E. Karniadakis. L earning nonlinear operators via deeponet based on the universal approximation theorem of op erators. Nat. Mach. Intell. , 3:218– 229, 2021
work page 2021
-
[47]
L. Lu, X. Meng, S. Cai, Z. Mao, S. Goswami, Z. Zhang, and G. E. Karniadakis. A comprehensive and fair comparison of two neural operators (with practical ext ensions) based on fair data. Computer Methods in Applied Mechanics and Engineering , 393:114778, 2022
work page 2022
- [48]
-
[49]
H. C. ¨Ozen and G. Bal. A dynamical polynomial chaos approach for lo ng-time evolution of SPDEs. Journal of Computational Physics , 343:300–323, 2017
work page 2017
-
[50]
M. Petrella, S. Tokareva, and E.F. Toro. Uncertainty qu antification methodology for hyperbolic systems with application to blood flow in arteries. Journal of Computational Physics , 386:405–427, 2019
work page 2019
-
[51]
S. Pranesh and D. Ghosh. Cost reduction of stochastic ga lerkin method by adaptive identification of significant polynomial chaos bases for elliptic equations. Computer Methods in Applied Mechanics and Engineering , 340:54–69, 2018
work page 2018
- [52]
-
[53]
Cho S and M. Choi. Mgdgan: Multiple generator and discri minator generative adversarial networks for solving stochastic partial differential equations. IEEE Access, 10:130908–130920, 2022
work page 2022
-
[54]
Stochastic Optimal Control through Gradient Projection Met hod and Back- ward Action Learning
Hui Sun. Stochastic Optimal Control through Gradient Projection Met hod and Back- ward Action Learning . Phd thesis, Florida State University, 2023. Retrieved fro m https://purl.lib.fsu.edu/diginole/Sun_fsu_0071E_18074
work page 2023
-
[55]
S. Tokareva, A. Zlotnik, and V. Gyrya. Stochastic finite volume method for uncertainty quan- tification of transient flow in gas pipeline networks. Applied Mathematical Modelling , 125:66–84, 2024
work page 2024
- [56]
-
[57]
N. Winovich, M. Daneker, Lu Lu, and G. Lin. Active operat or learning with predictive uncertainty quantification for partial differential equations. Journal of Computational Physics , 555:114791, 2026
work page 2026
-
[58]
Nick Winovich, Karthik Ramani, and Guang Lin. ConvPDE- UQ: Convolutional neural networks with quantified uncertainty for heterogeneous elliptic par tial differential equations on varied do- mains. Journal of Computational Physics , 394:263–279, 2019
work page 2019
-
[59]
Y. Yang, G. Kissas, and P. Perdikaris. Scalable uncerta inty quantification for deep operator networks using randomized priors. Computer Methods in Applied Mechanics and Engineering , 399:115399, 2022
work page 2022
-
[60]
J. Yong and X. Y. Zhou. Stochastic controls: Hamiltonian systems and HJB equation s. Number 43 in Applications of mathematics. Springer Science & Busines s Media, New York, 1999
work page 1999
-
[61]
W. Zhao, L. Chen, and S. Peng. A new kind of accurate numer ical method for backward stochastic differential equations. SIAM Journal on Scientific Computing , 28(4):1563–1581, 2006. 31
work page 2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.