RoverDevKit: An open, physics-grounded tradespace toolkit for conceptual design of lunar micro-rovers
Pith reviewed 2026-06-26 13:57 UTC · model grok-4.3
The pith
An open physics-based evaluator shows four-wheel lunar micro-rover layouts Pareto-dominate across mass ranges under smooth-regolith objectives.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
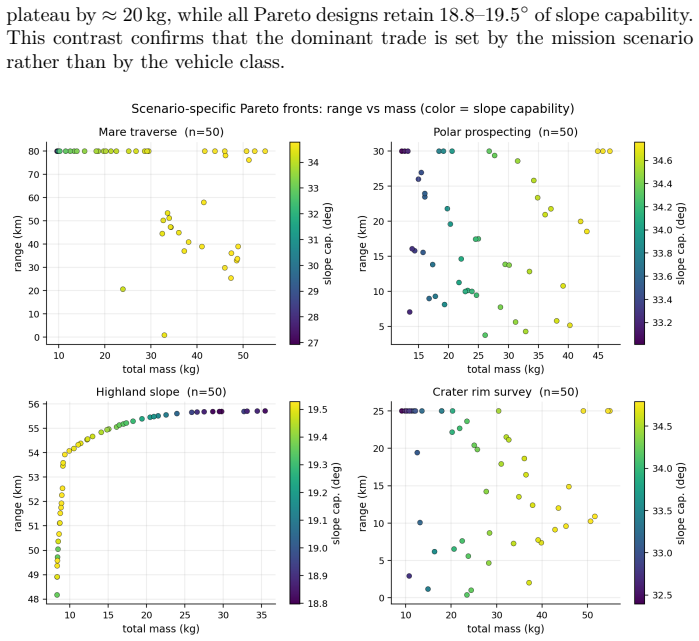
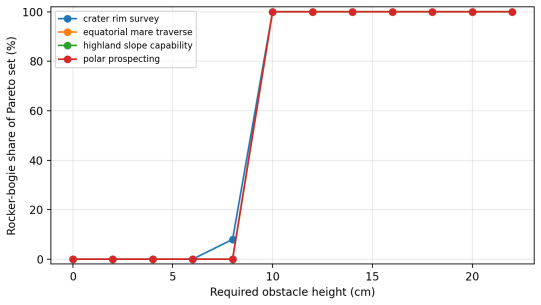
RoverDevKit enables direct use of a terramechanics-plus-mass evaluator as the fitness function for NSGA-II, producing Pareto fronts in which energy storage binds at high latitude, slope traction binds on loose highland regolith, and traverse range binds on mare and crater-rim missions; rigid four-wheel layouts occupy the entire front under smooth-regolith range-mass-slope objectives, while six-wheel rocker-bogie layouts appear only after an obstacle-navigation constraint is added.
What carries the argument
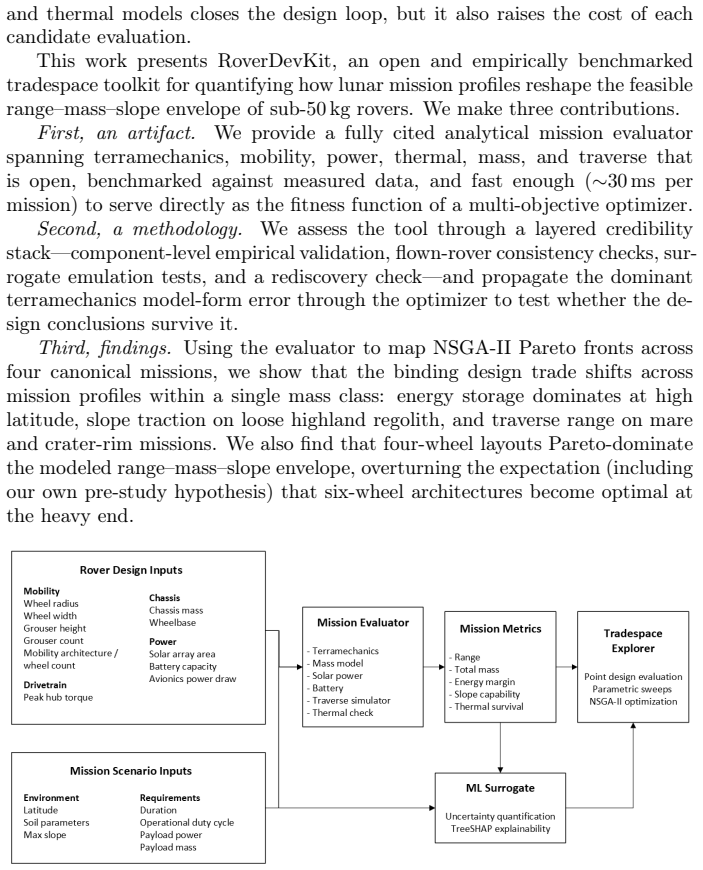
The RoverDevKit analytical evaluator that couples terramechanics, bottom-up mass, power, thermal survival, and traverse models to return a scalar fitness value in 30 ms for multi-objective search.
If this is right
- Energy storage mass becomes the binding constraint for polar missions while traction on loose regolith binds for highland missions.
- Rigid four-wheel layouts remain on the Pareto front for the full 5-50 kg range under range-mass-slope objectives.
- Six-wheel rocker-bogie suspensions enter the Pareto set only when an explicit obstacle-navigation requirement is imposed.
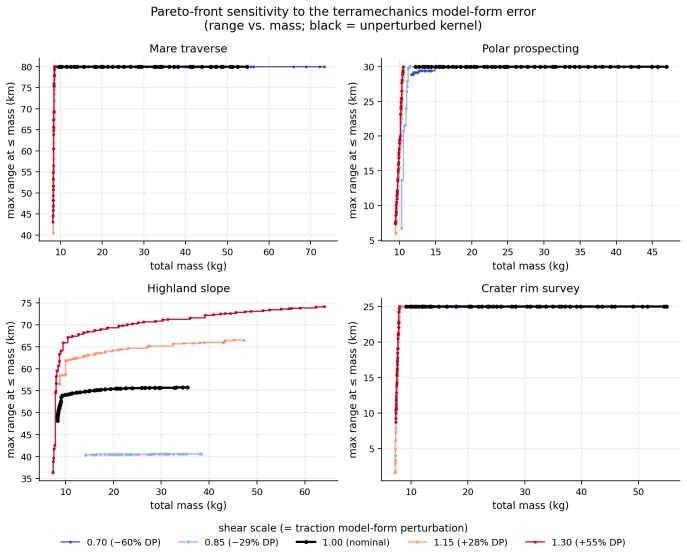
- Propagating the measured terramechanics model error through the optimizer does not alter the qualitative mission-specific trade rules.
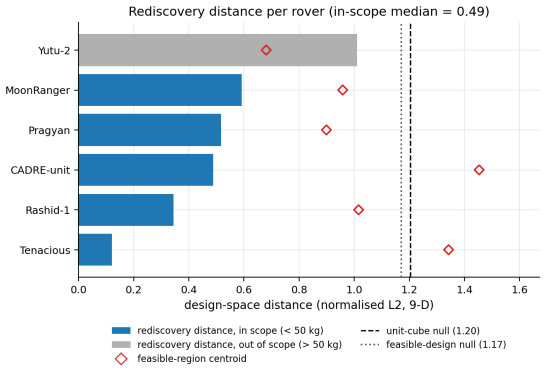
- Published real micro-rovers lie near the computed fronts in the rediscovery check.
Where Pith is reading between the lines
- The same evaluator structure could be extended to other planetary bodies by swapping the regolith parameters and gravity term.
- If the 30 ms evaluation time holds under added fidelity, the tool could support real-time trades during field operations planning.
- The open release of the evaluator, validation scripts, and data artifacts allows independent teams to test alternative terramechanics kernels against the same mission scenarios.
Load-bearing premise
The terramechanics kernel and bottom-up mass model remain accurate enough to support the reported Pareto dominance when checked only against existing literature datasets rather than new targeted lunar-regolith experiments.
What would settle it
A new single-wheel drawbar-pull measurement on simulated highland regolith or a published micro-rover mass that falls outside the 13.3 percent median error band of the mass model, when re-run through the optimizer, would move the four-wheel dominance off the front.
Figures
read the original abstract
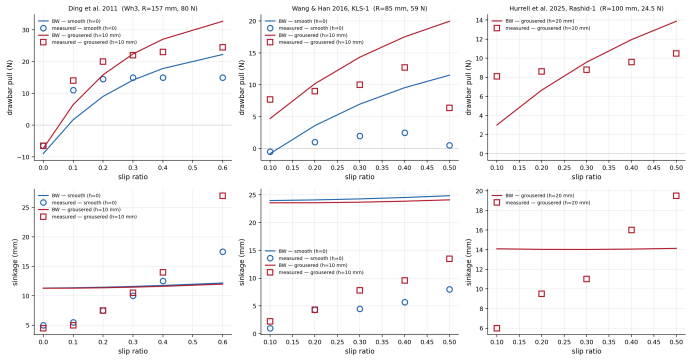
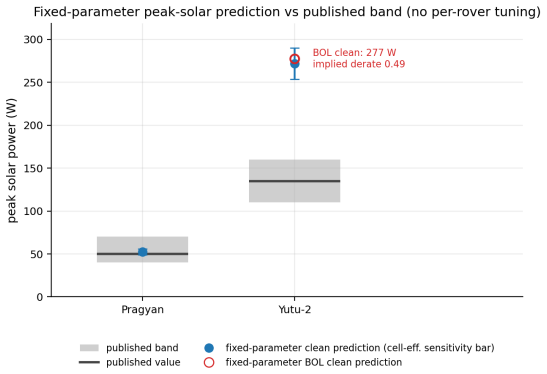
Pre-Phase-A design of lunar micro-rovers is dominated by tightly coupled mobility, power, thermal, and mass trades, yet conceptual-design tooling for the rapidly growing sub-50 kg class is typically proprietary, weakly benchmarked, or too slow to drive optimization. We contribute RoverDevKit, an open analytical evaluator coupling terramechanics, mass, power, thermal survival, and traverse that runs in 30ms per mission, fast enough to serve directly as a multi-objective optimizer's fitness function. Across mare, polar, highland, and crater-rim scenarios, NSGA-II Pareto fronts show that the binding design trade changes with mission profile within a single mass class: energy storage dominates at high latitude, slope traction on loose highland regolith, and traverse range on mare and crater-rim missions. Notably, rigid four-wheel layouts Pareto-dominate the full modeled mass range under smooth-regolith range-mass-slope objectives, contrary to the expectation that six-wheel architectures become optimal at heavier masses; six-wheel rocker-bogie layouts enter the Pareto set only once missions impose an obstacle-navigation requirement. The evaluator performance is benchmarked using both component and system checks: the terramechanics kernel matches measured single-wheel drawbar pull within the literature model-form band on two independent datasets, the bottom-up mass model predicts published in-class (5-50 kg) rover masses to 13.3% median absolute error, and a rediscovery check places real micro-rovers near the optimizer's fronts. Propagating the measured terramechanics error through the optimizer leaves the qualitative design rules unchanged. The tool, data, validation artifacts, and figure-generation scripts are released openly.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces RoverDevKit, an open analytical evaluator for lunar micro-rover conceptual design that couples terramechanics, bottom-up mass, power, thermal survival, and traverse models, running in 30 ms per mission to serve as a fitness function for NSGA-II multi-objective optimization. Across mare, polar, highland, and crater-rim scenarios, the resulting Pareto fronts indicate that binding trades shift with mission profile (energy storage at high latitude, slope traction on loose highland regolith, traverse range on mare/crater-rim), with rigid four-wheel layouts dominating under smooth-regolith range-mass-slope objectives and six-wheel rocker-bogie entering only with obstacle requirements. Validations include single-wheel drawbar-pull matching literature model-form bands on two datasets, 13.3% median absolute error on published 5-50 kg rover masses, rediscovery of real rovers near fronts, and explicit propagation of terramechanics error leaving qualitative rules unchanged. The tool, data, and scripts are released openly.
Significance. If the models hold at the reported accuracy, the work provides a valuable open, physics-grounded toolkit for tradespace exploration in the sub-50 kg lunar rover class, where proprietary or unbenchmarked tools currently dominate. Strengths include the explicit literature-dataset validations, error propagation demonstrating robustness of the mission-specific trade and 4-wheel dominance claims, rediscovery check, and full open release of code, data, validation artifacts, and figure scripts, which directly support reproducibility and extension.
minor comments (2)
- [Abstract and validation section] The abstract and validation sections refer to matching 'within the literature model-form band' on two datasets; a brief explicit definition or citation of the band width in the main text would aid readers in interpreting the terramechanics kernel accuracy.
- [Results figures] Figure captions for the Pareto fronts could note the exact NSGA-II population size and generation count used, to allow direct reproduction of the reported fronts.
Simulated Author's Rebuttal
We thank the referee for their positive review, detailed summary of the contribution, and recommendation to accept. No major comments were raised in the report.
Circularity Check
No significant circularity; derivation is self-contained against external benchmarks
full rationale
The paper constructs RoverDevKit from terramechanics kernels, bottom-up mass/power/thermal models, and NSGA-II optimization. All load-bearing elements are validated against independent literature datasets (single-wheel drawbar pull on two datasets, published 5-50 kg rover masses at 13.3% median error) with explicit error propagation that leaves qualitative Pareto rules unchanged. No step reduces a claimed prediction to a fitted parameter by construction, renames a known result, or relies on self-citation chains for uniqueness. The central claims (mission-specific binding trades, 4-wheel dominance) emerge from running the open evaluator on scenario inputs rather than from internal redefinition of those inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Literature terramechanics models remain predictive for the specific lunar regolith scenarios and wheel configurations modeled in the evaluator.
Reference graph
Works this paper leans on
-
[1]
eoPortal, Chandrayaan-3 - eoPortal,https://www.eoportal.org/ satellite-missions/chandrayaan-3, accessed: 2026-06-09 (2023)
2026
-
[2]
M. Alzaabi, L.-J. Burtz, S. Amilineni, S. Almesmar, M. S. Khoory, M. Al- balooshi, A. Salem, S. Almaeeni, S. G. Els, H. Almarzooqi, L. B. N. Clausen, M. Battler, M. Cross, Operational Concepts and Rehearsal Re- sults of the First Emirates Lunar Rover: Rashid-1, Space Science Reviews 220 (8) (2024) 84.doi:10.1007/s11214-024-01118-6
-
[3]
NASA Jet Propulsion Laboratory, CADRE (Cooperative Autonomous Dis- tributed Robotic Exploration),https://www.jpl.nasa.gov/missions/ cadre/, accessed 2026-06-09 (2024)
2026
-
[4]
ispace EUROPE S.A., Ispace-EUROPE announces Completion of First European Designed, Manufactured, and Assembled Lunar Micro Rover,https://ispace-inc.com/news-en/?p=5593, accessed: 2026-06- 09 (2024)
2026
-
[5]
A. M. Ross, D. E. Hastings, The tradespace exploration paradigm, in: INCOSE International Symposium, 2005, pp. 1706–1718
2005
-
[6]
M. G. Bekker, Introduction to Terrain-vehicle Systems, University of Michi- gan Press, 1969
1969
-
[7]
J.-Y. Wong, A. R. Reece, Prediction of rigid wheel performance based on the analysis of soil-wheel stresses part I. Performance of driven rigid wheels, Journal of Terramechanics 4 (1) (1967) 81–98.doi:10.1016/ 0022-4898(67)90105-X
1967
-
[8]
Janosi, B
Z. Janosi, B. Hanamoto, The analytical determination of drawbar pull as a function of slip for tracked vehicles in deformable soils, in: Proceedings of the 1st International Conference on the Mechanics of Soil–Vehicle Systems, 1961, pp. 707–736
1961
-
[9]
L. Ding, H. Gao, Z. Deng, K. Nagatani, K. Yoshida, Experimental study and analysis on driving wheels’ performance for planetary exploration rovers moving in deformable soil, Journal of Terramechanics 48 (1) (2011) 27–45.doi:10.1016/j.jterra.2010.08.001
-
[10]
Wang, Cheng-Can, Han, Jin-Tae, Experimental Study of Lunar Rover Wheel’s Motion Performance on Korean Lunar Soil Simulant, in: Jour- nal of the Korean Geotechnical Society, Vol. 32, 2016, pp. 97–108.doi: 10.7843/KGS.2016.32.11.97
-
[11]
J. Hurrell, K. Takehana, T. Tanaka, K. Uno, A. K. Busoud, K. Yoshida, Traction Performance Evaluation for a Rashid-1 Rover Wheel, Space Sci- ence Reviews 221 (3) (2025) 37.doi:10.1007/s11214-025-01164-8. 27
-
[12]
S. M. Lundberg, S.-I. Lee, A unified approach to interpreting model predic- tions, in: Proceedings of the 31st International Conference on Neural Infor- mation Processing Systems, NIPS’17, Curran Associates Inc., Red Hook, NY, USA, 2017, pp. 4768–4777
2017
-
[13]
K. Deb, A. Pratap, S. Agarwal, T. Meyarivan, A fast and elitist multiob- jective genetic algorithm: NSGA-II, IEEE Transactions on Evolutionary Computation 6 (2) (2002) 182–197.doi:10.1109/4235.996017
-
[14]
K. Case, A. Nash, A. Austin, J. Murphy, The Evolution of Team-X: 25 Years of Concurrent Engineering Design Experience, in: 2021 IEEE Aerospace Conference (50100), 2021, pp. 1–6.doi:10.1109/AERO50100. 2021.9438521
-
[15]
Lamamy, D
J.-A. Lamamy, D. W. Miller, Designing the next generation of rovers through a mid-rover analysis, in: Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA), Noordwijk, The Netherlands, 2006. URLhttps://robotics.estec.esa.int/ASTRA/Astra2006/Papers/ ASTRA2006-2.2.1.01.pdf
2006
-
[16]
Jagula, Module-Based Design Tool for Planetary Rovers, https://elib.dlr.de/56194/ (Aug
D. Jagula, Module-Based Design Tool for Planetary Rovers, https://elib.dlr.de/56194/ (Aug. 2008)
2008
-
[17]
Michaud, T
S. Michaud, T. Thueer, A. Krebs, Rover Chassis Evaluation and Design Optimisation Using the RCET, in: Proceedings of The 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA), 2006.arXiv:20.500.11850/82640
2006
-
[18]
A. Seeni, B. Schäfer, A computational tool for conceptual design and op- timization of planetary rovers, INCAS BULLETIN 15 (1) (2023) 81–96. doi:10.13111/2066-8201.2023.15.1.8
-
[19]
Riccobono, G
D. Riccobono, G. Genta, S. Moreland, P. Backes, A multidisciplinary de- sign tool for robotic systems involved in sampling operations on plane- tary bodies, CEAS Space Journal 13 (2) (2021) 155–174.doi:10.1007/ s12567-020-00330-8
2021
-
[20]
Y. Kim, J. Ahn, Multi-disciplinary and Multi-objective Design Optimiza- tion of a Lunar Rover System with Operational Considerations, Interna- tional Journal of Aeronautical and Space Sciences 23 (1) (2022) 192–206. doi:10.1007/s42405-021-00415-6
-
[21]
M. A. Alhajeri, M. Ceriotti, K. Worrall, Model-based systems engineering simulation tool for the design and performance analysis of modular lunar rovers, in: Proceedings of the 74th International Astronautical Congress, Baku, Azerbaijan, 2023. 28
2023
-
[22]
A. I. J. Forrester, A. J. Keane, Recent advances in surrogate-based op- timization, Progress in Aerospace Sciences 45 (1) (2009) 50–79.doi: 10.1016/j.paerosci.2008.11.001
-
[23]
W. Yao, X. Chen, W. Luo, M. van Tooren, J. Guo, Review of uncertainty- based multidisciplinary design optimization methods for aerospace vehicles, Progress in Aerospace Sciences 47 (6) (2011) 450–479.doi:10.1016/j. paerosci.2011.05.001
work page doi:10.1016/j 2011
-
[24]
K. Iizuka, T. Yoshida, T. Kubota, Effect of tractive given by grousers mounted on wheels for lunar rovers on loose soil, in: IECON 2011 - 37th Annual Conference of the IEEE Industrial Electronics Society, 2011, pp. 110–115.doi:10.1109/IECON.2011.6119297
-
[25]
Kanamori, S
H. Kanamori, S. Udagawa, T. Yoshida, S. Matsumoto, K. Takagi, Proper- ties of lunar soil simulant manufactured in japan, in: Space 98, 1998, pp. 462–468
1998
-
[26]
X. Zeng, C. He, H. Oravec, A. Wilkinson, J. Agui, V. Asnani, Geotechnical Properties of JSC-1A Lunar Soil Simulant, Journal of Aerospace Engineer- ing 23 (2) (2010) 111–116.doi:10.1061/(ASCE)AS.1943-5525.0000014
-
[27]
H. A. Oravec, X. Zeng, V. M. Asnani, Design and characterization of GRC- 1: A soil for lunar terramechanics testing in Earth-ambient conditions, JournalofTerramechanics47(6)(2010)361–377.doi:10.1016/j.jterra. 2010.04.006
-
[28]
C. He, X. Zeng, A. Wilkinson, Geotechnical Properties of GRC-3 Lunar Simulant, Journal of Aerospace Engineering 26 (3) (2013) 528–534.doi: 10.1061/(ASCE)AS.1943-5525.0000162
-
[29]
G. H. Heiken, D. T. Vaniman, B. M. French (Eds.), Lunar Sourcebook: A User’s Guide to the Moon, Cambridge University Press, Cambridge, UK, 1991
1991
-
[30]
2023, npj Microgravity, 9, 61, doi: 10.1038/s41526-023-00308-w
S. Ozaki, G. Ishigami, M. Otsuki, H. Miyamoto, K. Wada, Y. Watan- abe, T. Nishino, H. Kojima, K. Soda, Y. Nakao, M. Sutoh, T. Maeda, T. Kobayashi, Granular flow experiment using artificial gravity gener- ator at International Space Station, npj Microgravity 9 (1) (2023) 61. doi:10.1038/s41526-023-00308-w
-
[31]
X. Wu, H. Yang, L. Ding, L. Yang, J. Tao, H. Gao, Z. Qiao, R. Zhou, Z. Deng, Experimental Study and Analysis of Wheel-Terrain Interaction for Crewed Lunar Vehicle Based on Single-Wheel Testbed, in: T. Matsuno, H. Liu, L. Liu, Z. Yin, X. Zhu, W. Ren, Z. Wang, Y. Sheng (Eds.), In- telligent Robotics and Applications, Springer Nature, Singapore, 2026, pp. 13...
-
[32]
Agarwal, C
S. Agarwal, C. Senatore, T. Zhang, M. Kingsbury, K. Iagnemma, D. I. Goldman, K. Kamrin, Modeling of the interaction of rigid wheels with dry granular media, Journal of Terramechanics 85 (2019) 1–14.doi:10.1016/ j.jterra.2019.06.001
2019
-
[33]
G. Ishigami, A. Miwa, K. Nagatani, K. Yoshida, Terramechanics-based model for steering maneuver of planetary exploration rovers on loose soil, Journal of Field Robotics 24 (3) (2007) 233–250.doi:10.1002/rob.20187
-
[34]
J. R. Wertz, D. F. Everett, J. J. Puschell, Space Mission Engineering: The New SMAD, Microcosm Press, Hawthorne, CA, 2011
2011
-
[35]
American Institute of Aeronautics and Astronautics, AIAA S-120A: Mass properties control for space systems, AIAA Standard (2015)
2015
-
[36]
J. A. Duffie, W. A. Beckman, Solar Engineering of Thermal Processes, 4th Edition, John Wiley & Sons, Hoboken, NJ, 2013
2013
-
[37]
G. Kopp, J. L. Lean, A new, lower value of total solar irradiance: Evi- dence and climate significance, Geophysical Research Letters 38 (1) (2011) L01706.doi:10.1029/2010GL045777
-
[38]
D. G. Gilmore, Spacecraft Thermal Control Handbook, Volume I: Funda- mental Technologies, 2nd Edition, The Aerospace Press, El Segundo, CA, 2002
2002
-
[39]
M. D. McKay, R. J. Beckman, W. J. Conover, Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Out- put from a Computer Code, Technometrics 21 (2) (1979) 239–245.doi: 10.1080/00401706.1979.10489755
-
[40]
T. Chen, C. Guestrin, XGBoost: A Scalable Tree Boosting System, in: Pro- ceedings of the 22nd ACM SIGKDD International Conference on Knowl- edge Discovery and Data Mining, KDD ’16, Association for Computing Ma- chinery, New York, NY, USA, 2016, pp. 785–794.doi:10.1145/2939672. 2939785
-
[41]
Y. Lim, V. D. Le, P. A. Bahati, Development of a New Pressure-Sinkage Model for Rover Wheel-Lunar Soil Interaction based on Dimensional Anal- ysis and Bevameter Tests, Journal of Astronomy and Space Sciences 38 (4) (2021) 237–250.doi:10.5140/JASS.2021.38.4.237
-
[42]
M. R. Patel, Spacecraft Power Systems, 2nd Edition, CRC Press, Boca Raton, FL, 2023. 30
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.