hia-gat: A Heterogeneous Interaction-Aware Graph Attention Network For Frame-Level Traffic Conflict Risk Prediction On Freeways
Pith reviewed 2026-06-29 01:26 UTC · model grok-4.3
The pith
HIA-GAT ranks frame-level freeway conflict risk by running separate attention streams on same-lane and adjacent-lane vehicle graphs then fusing them with a supervised gate.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
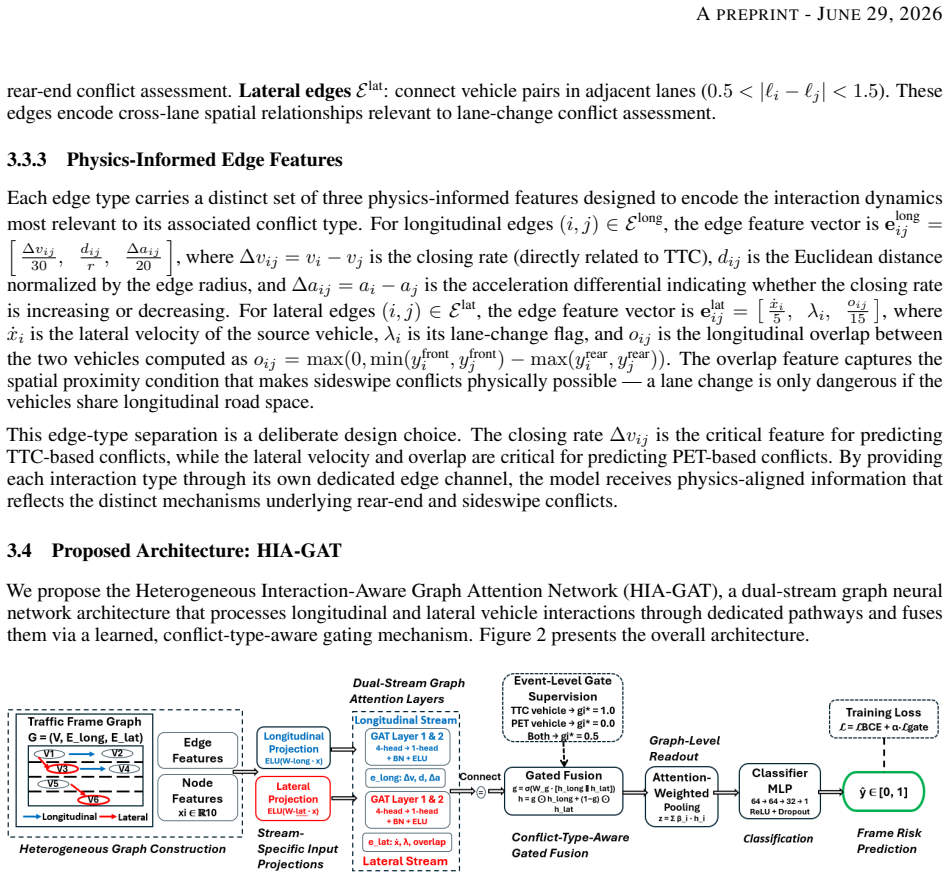
Frame-level risk is predicted by constructing per-frame heterogeneous graphs with two edge types, feeding them through a dual-stream graph attention network, and fusing the streams with a gating mechanism trained under event-level supervision derived from SSM conflict attribution; this architecture attains AUC 0.835 on I-80 and 0.867 on US-101 and shows that relational structure is essential for lateral but not always for longitudinal conflict detection.
What carries the argument
Dual-stream heterogeneous graph attention network with conflict-type-aware gating that processes longitudinal and lateral interactions separately before fusion under event-level supervision.
If this is right
- Relational structure improves accuracy most on PET-only lane-change settings where non-relational models lose the most ground.
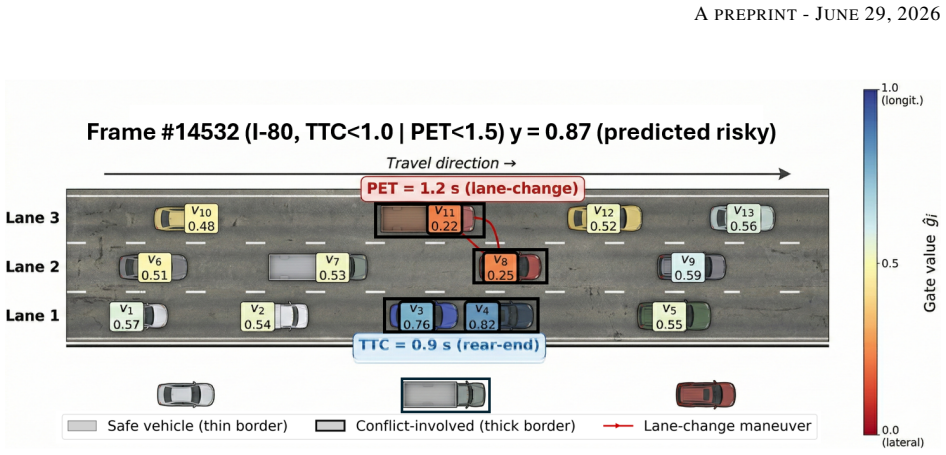
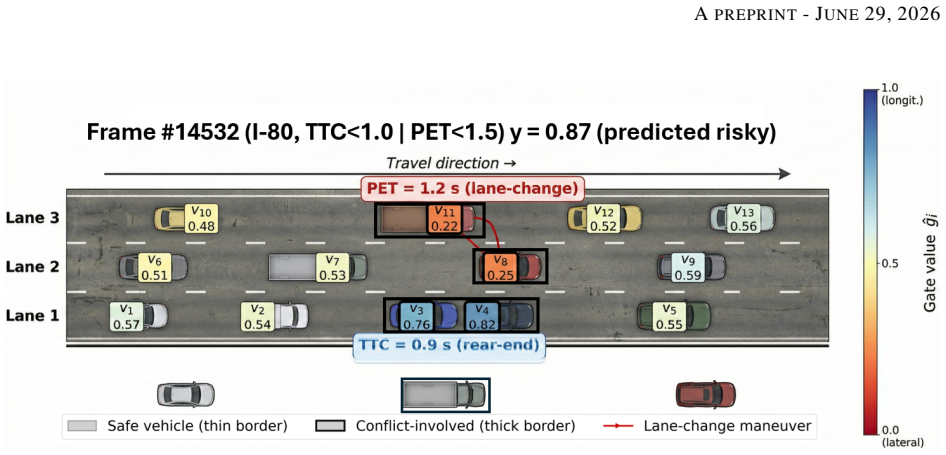
- The learned gate supplies per-vehicle attribution of which conflict type dominates each frame.
- Longitudinal rear-end risk can frequently be captured by simple aggregation without explicit edges.
- The same graph construction and supervision recipe supports real-time monitoring across multiple severity thresholds.
- Graph-based models outperform the non-graph baselines that were benchmarked on the NGSIM data.
Where Pith is reading between the lines
- The two-edge construction could be tested on urban arterial data where additional interaction types such as yielding or merging appear.
- The gating output might be used directly as input to downstream trajectory planners that need to know the dominant conflict mode.
- If the same supervision signal works on datasets with different sensor noise levels, the method could transfer to camera-only freeway deployments.
- Replacing the fixed thresholds with learned severity functions would test whether the graph architecture still adds value when labels are softer.
Load-bearing premise
The two-edge-type graph construction together with the physics-informed edge features and the SSM-derived gate supervision correctly represent the mechanisms that produce the chosen TTC and PET risk labels.
What would settle it
A non-graph or single-stream baseline reaching equal or higher AUC on the same I-80 and US-101 frames and the same nine TTC/PET thresholds would show the heterogeneous graph and dual-stream design are not required.
Figures
read the original abstract
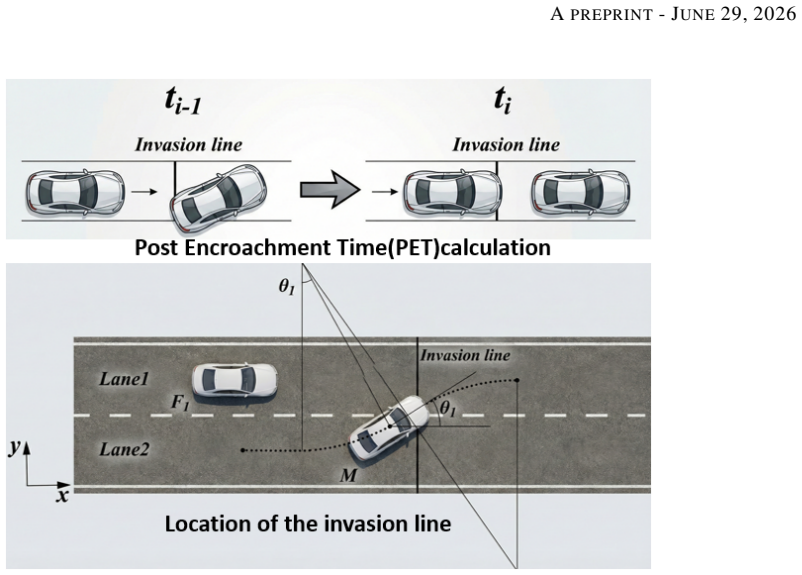
This paper formulates frame-level freeway risk assessment as a multi-agent scene graph-level binary classification problem, where each video or trajectory frame is labeled risky if any TTC- or PET-based conflict violates a specified severity threshold. We construct a relation-aware graph per frame with vehicles as nodes and two interaction types as edges: same-lane (longitudinal) and adjacent-lane (lateral), augmented with physics-informed edge features aligned to rear-end and lane-change conflict mechanisms. Building on a structured benchmarking suite of non-graph models and graph baselines, we propose HIA-GAT, a dual-stream heterogeneous graph attention network that processes longitudinal and lateral interactions through dedicated attention pathways and fuses them via a conflict-type-aware gating mechanism with event-level gate supervision derived from SSM conflict attribution. Experiments on the NGSIM I-80 and US-101 freeway datasets across nine TTC and PET threshold configurations show that HIA-GAT achieves the best average risk-ranking performance (AUC 0.835 on I-80 and 0.867 on US-101), with the largest gains on PET-only (lane-change) settings where relational structure is essential. Beyond accuracy, the learned gate provides interpretable per-vehicle attribution of dominant conflict type, supporting actionable, real-time freeway safety monitoring. We show that graph structure is critical for modeling lateral conflict risk, while longitudinal risk can often be captured by non-relational aggregation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formulates frame-level freeway risk assessment as a multi-agent scene graph-level binary classification problem, labeling each frame risky if any TTC- or PET-based conflict violates a severity threshold. It builds per-frame graphs with vehicles as nodes and two edge types (same-lane longitudinal, adjacent-lane lateral) augmented by physics-informed features. HIA-GAT is proposed as a dual-stream heterogeneous graph attention network that processes the two interaction types separately and fuses them via a conflict-type-aware gating mechanism whose supervision is derived from SSM conflict attribution. On NGSIM I-80 and US-101, across nine TTC/PET threshold configurations, HIA-GAT reports the highest average AUC (0.835 and 0.867) with largest gains on PET-only (lane-change) settings; the work also claims that graph structure is essential for lateral risk while longitudinal risk can be captured by non-relational aggregation, and that the learned gate yields interpretable per-vehicle conflict-type attribution.
Significance. If the central modeling assumptions hold, the work supplies a concrete, relation-aware architecture for frame-level conflict prediction that explicitly separates longitudinal and lateral mechanisms and supplies an interpretable gating output. The structured benchmarking against non-graph and graph baselines is a positive feature. However, the absence of error bars, ablation tables, and verification that the edge definitions and SSM supervision are independent of the TTC/PET labeling rules substantially weakens the evidential support for the headline performance claims.
major comments (3)
- [Abstract (supervision paragraph)] Abstract (supervision paragraph): the event-level gate supervision is derived from SSM conflict attribution on the same TTC/PET labels used for the main binary classification task; without an explicit derivation or controlled experiment demonstrating that this supervision does not induce indirect label leakage into the reported AUC, the claimed advantage on PET-only settings cannot be unambiguously attributed to the heterogeneous attention architecture.
- [Abstract (experiments paragraph)] Abstract (experiments paragraph): superior average AUC is stated across nine threshold configurations, yet no standard deviations, confidence intervals, or statistical significance tests are provided, and no ablation tables are referenced that isolate the contribution of the two-edge-type construction, dual-stream attention, or conflict-type-aware gating.
- [Abstract (graph construction paragraph)] Abstract (graph construction paragraph): the central claim that the two-edge-type graph (same-lane longitudinal, adjacent-lane lateral) together with physics-informed edge features and SSM-derived gating faithfully captures the mechanisms determining TTC/PET frame labels is load-bearing for the superiority result, but remains unverified; a sensitivity study replacing the edge definitions or removing the SSM supervision would be required to rule out construction artifacts.
minor comments (2)
- [Abstract] The abstract refers to a 'structured benchmarking suite' without enumerating the exact non-graph models and graph baselines employed.
- Full training details, hyper-parameters, random seeds, and precise dataset splits should be supplied to support reproducibility of the reported AUC values.
Simulated Author's Rebuttal
We thank the referee for their insightful comments on our manuscript. We address each of the major comments below, acknowledging the need for additional verification and statistical reporting. We plan to incorporate revisions accordingly.
read point-by-point responses
-
Referee: [Abstract (supervision paragraph)] Abstract (supervision paragraph): the event-level gate supervision is derived from SSM conflict attribution on the same TTC/PET labels used for the main binary classification task; without an explicit derivation or controlled experiment demonstrating that this supervision does not induce indirect label leakage into the reported AUC, the claimed advantage on PET-only settings cannot be unambiguously attributed to the heterogeneous attention architecture.
Authors: We appreciate this concern regarding potential indirect label leakage. The gate supervision is derived from SSM-based attribution of the specific conflict type (longitudinal vs. lateral) per interacting pair, whereas the frame label is a binary indicator of whether any conflict exceeds the threshold. This distinction means the supervision provides type information rather than directly copying the label. Nevertheless, to strengthen the claim, we will add an explicit derivation of the supervision process in the methods section and include a controlled experiment in the revised manuscript where we compare against a version with randomized gate supervision to confirm no leakage affects the AUC. revision: yes
-
Referee: [Abstract (experiments paragraph)] Abstract (experiments paragraph): superior average AUC is stated across nine threshold configurations, yet no standard deviations, confidence intervals, or statistical significance tests are provided, and no ablation tables are referenced that isolate the contribution of the two-edge-type construction, dual-stream attention, or conflict-type-aware gating.
Authors: We agree that the absence of error bars, confidence intervals, and ablation studies limits the strength of the performance claims. In the revised manuscript, we will report standard deviations from multiple training runs, include 95% confidence intervals for the AUC values, perform statistical significance tests (e.g., paired t-tests) against baselines, and add comprehensive ablation tables isolating the effects of the heterogeneous edge types, dual-stream attention, and the gating mechanism. revision: yes
-
Referee: [Abstract (graph construction paragraph)] Abstract (graph construction paragraph): the central claim that the two-edge-type graph (same-lane longitudinal, adjacent-lane lateral) together with physics-informed edge features and SSM-derived gating faithfully captures the mechanisms determining TTC/PET frame labels is load-bearing for the superiority result, but remains unverified; a sensitivity study replacing the edge definitions or removing the SSM supervision would be required to rule out construction artifacts.
Authors: We acknowledge that verifying the sensitivity of the results to the specific edge definitions and SSM supervision is crucial to support the architectural claims. We will conduct and report a sensitivity analysis in the revision, including experiments with alternative edge constructions (e.g., fully connected graphs or single edge type) and ablations removing the SSM-derived supervision to demonstrate that the performance gains are not artifacts of the graph construction. revision: yes
Circularity Check
No circularity; empirical performance on held-out frames is independent of construction
full rationale
The paper defines a two-edge-type graph from domain rules (same-lane longitudinal, adjacent-lane lateral), augments with physics-informed features, applies dual-stream attention plus SSM-derived gating, and measures AUC on held-out NGSIM frames across TTC/PET thresholds. No equation or claim reduces the reported ranking performance to the input labels or graph definition by construction; the advantage on PET-only settings is presented as an empirical outcome rather than a definitional identity. The supervision shares conflict labels but does not force the AUC metric.
Axiom & Free-Parameter Ledger
free parameters (1)
- attention and gating weights
axioms (2)
- domain assumption The chosen TTC and PET thresholds produce reliable binary risk labels that align with actual conflict severity.
- domain assumption The two interaction edge types plus physics-informed features are sufficient to represent rear-end and lane-change mechanisms.
Reference graph
Works this paper leans on
-
[1]
Fatality Analysis Reporting System (FARS)
National Highway Traffic Safety Administration. Fatality Analysis Reporting System (FARS). https://www. nhtsa.gov/research-data/fatality-analysis-reporting-system-fars, n.d., Accessed: 2025-07-07
2025
-
[2]
About Intersection Safety
Federal Highway Administration. About Intersection Safety. https://highways.dot.gov/safety/ intersection-safety/about, n.d., Accessed: 2025-07-07
2025
-
[3]
Factors contributing to the severity of intersection crashes.Journal of Advanced Transportation, 41(3):245–265, 2007
Richard Tay and Shakil Mohammad Rifaat. Factors contributing to the severity of intersection crashes.Journal of Advanced Transportation, 41(3):245–265, 2007
2007
-
[4]
Temporal and spatial analyses of rear-end crashes at signalized intersections.Accident Analysis & Prevention, 38(6):1137–1150, 2006
Xuesong Wang and Mohamed Abdel-Aty. Temporal and spatial analyses of rear-end crashes at signalized intersections.Accident Analysis & Prevention, 38(6):1137–1150, 2006
2006
-
[5]
Right-angle crash occurrence at signalized intersections.Transportation Research Record, 2019(1):156–168, 2007
Xuesong Wang and Mohamed Abdel-Aty. Right-angle crash occurrence at signalized intersections.Transportation Research Record, 2019(1):156–168, 2007
2019
-
[6]
Intersection characteristics that influence collision severity and cost
Andrew Northmore and Eric Hildebrand. Intersection characteristics that influence collision severity and cost. Journal of safety research, 70:49–57, 2019
2019
-
[7]
Intersection accident estimation: the role of intersection location and non- collision flows.Accident Analysis & Prevention, 30(4):505–517, 1998
Shane Turner and Alan Nicholson. Intersection accident estimation: the role of intersection location and non- collision flows.Accident Analysis & Prevention, 30(4):505–517, 1998
1998
-
[8]
Collision pattern modeling and real-time collision detection at road intersections
Flora Dilys Salim, Seng Wai Loke, Andry Rakotonirainy, Bala Srinivasan, and Shonali Krishnaswamy. Collision pattern modeling and real-time collision detection at road intersections. In2007 IEEE Intelligent transportation systems conference, pages 161–166. IEEE, 2007
2007
-
[9]
Role of peripheral vision in brake reaction time during safety critical events
Abhijit Sarkar, Hananeh Alambeigi, Anthony McDonald, Gustav Markkula, and Jeff Hickman. Role of peripheral vision in brake reaction time during safety critical events. InProceedings of the Human Factors and Ergonomics Society Annual Meeting, volume 65, number 1, pages 695–699. SAGE Publications Sage CA: Los Angeles, CA, 2021
2021
-
[10]
Bor-Shong Liu. Association of intersection approach speed with driver characteristics, vehicle type and traffic conditions comparing urban and suburban areas.Accident Analysis & Prevention, 39(2):216–223, 2007
2007
-
[11]
Multidisciplinary in-depth investigations of head-on and left-turn road collisions
Lotte Larsen and Peter Kines. Multidisciplinary in-depth investigations of head-on and left-turn road collisions. Accident Analysis & Prevention, 34(3):367–380, 2002
2002
-
[12]
Vision-Based Collision Warning Systems with Deep Learning: A Systematic Review.Journal of Imaging, 11(2):64, 2025
Charith Chitraranjan, Vipooshan Vipulananthan, and Thuvarakan Sritharan. Vision-Based Collision Warning Systems with Deep Learning: A Systematic Review.Journal of Imaging, 11(2):64, 2025
2025
-
[13]
Deep learning serves traffic safety analysis: A forward-looking review.IET Intelligent Transport Systems, 17(1):22–71, 2023
Abolfazl Razi, Xiwen Chen, Huayu Li, Hao Wang, Brendan Russo, Yan Chen, and Hongbin Yu. Deep learning serves traffic safety analysis: A forward-looking review.IET Intelligent Transport Systems, 17(1):22–71, 2023
2023
-
[14]
Micro-simulation modelling for traffic safety: A review and potential application to heterogeneous traffic environment.IATSS research, 43(1):27–36, 2019
SM Sohel Mahmud, Luis Ferreira, Md Shamsul Hoque, and Ahmad Tavassoli. Micro-simulation modelling for traffic safety: A review and potential application to heterogeneous traffic environment.IATSS research, 43(1):27–36, 2019
2019
-
[15]
Development of zone system for macro-level traffic safety analysis.Journal of transport geography, 38:13–21, 2014
Jaeyoung Lee, Mohamed Abdel-Aty, and Ximiao Jiang. Development of zone system for macro-level traffic safety analysis.Journal of transport geography, 38:13–21, 2014
2014
-
[16]
Artificial neural networks and logit models for traffic safety analysis of toll plazas.Transportation Research Record, 1784(1):115–125, 2002
Hassan T Abdelwahab and Mohamed A Abdel-Aty. Artificial neural networks and logit models for traffic safety analysis of toll plazas.Transportation Research Record, 1784(1):115–125, 2002
2002
-
[17]
Multilevel data and Bayesian analysis in traffic safety.Accident Analysis & Prevention, 42(6):1556–1565, 2010
Helai Huang and Mohamed Abdel-Aty. Multilevel data and Bayesian analysis in traffic safety.Accident Analysis & Prevention, 42(6):1556–1565, 2010
2010
-
[18]
An integration of different computing approaches in traffic safety analysis
Yetis Sazi Murat and Ziya Cakici. An integration of different computing approaches in traffic safety analysis. Transportation research procedia, 22:265–274, 2017
2017
-
[19]
Assessment of Traffic Safety Between Pedestrians and Vehicles Using Traffic Conflict Technique
Tuan Thanh Nguyen and Phuong Thao Cao. Assessment of Traffic Safety Between Pedestrians and Vehicles Using Traffic Conflict Technique. InInternational Conference on Sustainability in Civil Engineering, pages 763–769. Springer, 2022. 14 APREPRINT- JUNE29, 2026
2022
-
[20]
Madhumita Paul and Indrajit Ghosh. Post encroachment time threshold identification for right-turn related crashes at unsignalized intersections on intercity highways under mixed traffic.International journal of injury control and safety promotion, 27(2):121–135, 2020
2020
-
[21]
A modified post encroachment time model of urban road merging area based on lane-change characteristics.IEEE Access, 8:72835–72846, 2020
Weiwei Qi, Wei Wang, Bin Shen, and Jiabin Wu. A modified post encroachment time model of urban road merging area based on lane-change characteristics.IEEE Access, 8:72835–72846, 2020
2020
-
[22]
Real-time risk prediction at signalized intersections using a graph neural network
Akash Sonth, Abhijit Sarkar, Sparsh Jain, Hirva Bhagat, and Zachary R Doerzaph. Real-time risk prediction at signalized intersections using a graph neural network. Safe-D University Transportation Center, 2023
2023
-
[23]
Manual on uniform traffic control devices.US Department of Transportation, Federal Highway Administation, 2009
C Traffic. Manual on uniform traffic control devices.US Department of Transportation, Federal Highway Administation, 2009
2009
-
[24]
Distracted driving, visual inattention, and crash risk among teenage drivers.American journal of preventive medicine, 56(4):494–500, 2019
Pnina Gershon, Kellienne R Sita, Chunming Zhu, Johnathon P Ehsani, Sheila G Klauer, Tom A Dingus, and Bruce G Simons-Morton. Distracted driving, visual inattention, and crash risk among teenage drivers.American journal of preventive medicine, 56(4):494–500, 2019
2019
-
[25]
The statistical analysis of crash-frequency data: A review and assessment of methodological alternatives.Transportation research part A: policy and practice, 44(5):291–305, 2010
Dominique Lord and Fred Mannering. The statistical analysis of crash-frequency data: A review and assessment of methodological alternatives.Transportation research part A: policy and practice, 44(5):291–305, 2010
2010
-
[26]
The statistical analysis of highway crash-injury severities: A review and assessment of methodological alternatives.Accident Analysis & Prevention, 43(5):1666–1676, 2011
Peter T Savolainen, Fred L Mannering, Dominique Lord, and Mohammed A Quddus. The statistical analysis of highway crash-injury severities: A review and assessment of methodological alternatives.Accident Analysis & Prevention, 43(5):1666–1676, 2011
2011
-
[27]
Severity of driver injury and vehicle damage in traffic crashes at intersections: a Bayesian hierarchical analysis.Accident Analysis & Prevention, 40(1):45–54, 2008
Helai Huang, Hoong Chor Chin, and Md Mazharul Haque. Severity of driver injury and vehicle damage in traffic crashes at intersections: a Bayesian hierarchical analysis.Accident Analysis & Prevention, 40(1):45–54, 2008
2008
-
[28]
Analysis of intersection traffic safety in the city of San Antonio, 2013–2017.Sustainability, 13(9):5296, 2021
Khondoker Billah, Qasim Adegbite, Hatim O Sharif, Samer Dessouky, and Lauren Simcic. Analysis of intersection traffic safety in the city of San Antonio, 2013–2017.Sustainability, 13(9):5296, 2021
2013
-
[29]
N Mohamed Hasain and Mokaddes Ali Ahmed. Safety evaluation of unsignalized intersection with heterogeneous traffic using Post Encroachment Time and conflicting vehicle speed.European Transport/Trasporti Europei, 88(88):1–14, 2022
2022
-
[30]
Validation of surrogate measures of safety with a focus on bicyclist–motor vehicle interactions.Accident Analysis & Prevention, 153:106037, 2021
Carl Johnsson, Aliaksei Laureshyn, and Carmelo Dágostino. Validation of surrogate measures of safety with a focus on bicyclist–motor vehicle interactions.Accident Analysis & Prevention, 153:106037, 2021
2021
-
[31]
A comparison of headway and time to collision as safety indicators.Accident analysis & prevention, 35(3):427–433, 2003
Katja V ogel. A comparison of headway and time to collision as safety indicators.Accident analysis & prevention, 35(3):427–433, 2003
2003
-
[32]
Time-to-collision judgments under realistic driving conditions.Human factors, 48(2):334–345, 2006
Raymond J Kiefer, Carol A Flannagan, and Christian J Jerome. Time-to-collision judgments under realistic driving conditions.Human factors, 48(2):334–345, 2006
2006
-
[33]
Adjusted minimum time-to-collision (TTC): A robust approach to evaluating crash scenarios
Timothy L Brown. Adjusted minimum time-to-collision (TTC): A robust approach to evaluating crash scenarios. InProceedings of the Driving Simulation Conference North America, volume 40, pages 40–48, 2005
2005
-
[34]
Can post encroachment time substitute intersection characteristics in crash prediction models?Journal of safety research, 66:205–211, 2018
Lakshmi N Peesapati, Michael P Hunter, and Michael O Rodgers. Can post encroachment time substitute intersection characteristics in crash prediction models?Journal of safety research, 66:205–211, 2018
2018
-
[35]
Comparison of threshold determination methods for the deceleration rate to avoid a crash (DRAC)-based crash estimation.Accident Analysis & Prevention, 153:106051, 2021
Chuanyun Fu and Tarek Sayed. Comparison of threshold determination methods for the deceleration rate to avoid a crash (DRAC)-based crash estimation.Accident Analysis & Prevention, 153:106051, 2021
2021
-
[36]
A time gap interval for safe following distance (TGFD) in avoiding car collision in wireless vehicular networks (V ANET) environment
Suzi Iryanti Fadilah and Azizul Rahman Mohd Shariff. A time gap interval for safe following distance (TGFD) in avoiding car collision in wireless vehicular networks (V ANET) environment. In2014 5th International Conference on Intelligent Systems, Modelling and Simulation, pages 683–689. IEEE, 2014
2014
-
[37]
Extended time-to-collision measures for road traffic safety assessment
Michiel M Minderhoud and Piet HL Bovy. Extended time-to-collision measures for road traffic safety assessment. Accident Analysis & Prevention, 33(1):89–97, 2001
2001
-
[38]
Near miss determination through use of a scale of danger
John C Hayward. Near miss determination through use of a scale of danger. Pennsylvania State University University Park, 1972
1972
-
[39]
EV-TTC: Event-Based Time to Collision under Low Light Conditions.IEEE Robotics and Automation Letters, 2025
Anthony Bisulco, Vijay Kumar, and Kostas Daniilidis. EV-TTC: Event-Based Time to Collision under Low Light Conditions.IEEE Robotics and Automation Letters, 2025
2025
-
[40]
Safety Analysis at Unsignalized T Intersection Using PET and Extreme Value Theorem.Transportation in Developing Economies, 11(1):1–15, 2025
Jino Thomas Therattil, More Prathamesh Avinash, and Nipjyoti Bharadwaj. Safety Analysis at Unsignalized T Intersection Using PET and Extreme Value Theorem.Transportation in Developing Economies, 11(1):1–15, 2025
2025
-
[41]
Sepp hochreiter and jürgen schmidhuber.Neural Computation, 9(8):1735, 1997
Long Short-Term Memory. Sepp hochreiter and jürgen schmidhuber.Neural Computation, 9(8):1735, 1997
1997
-
[42]
Surrogate safety analysis of pedestrian-vehicle conflict at intersections using unmanned aerial vehicle videos.Journal of advanced transportation, 2017(1):5202150, 2017
Peng Chen, Weiliang Zeng, Guizhen Yu, and Yunpeng Wang. Surrogate safety analysis of pedestrian-vehicle conflict at intersections using unmanned aerial vehicle videos.Journal of advanced transportation, 2017(1):5202150, 2017. 15 APREPRINT- JUNE29, 2026
2017
-
[43]
Traffic safety analysis on mixed traffic flows at signalized intersection based on Haar-Adaboost algorithm and machine learning.Safety Science, 120:248–253, 2019
Quan Yu and Yuting Zhou. Traffic safety analysis on mixed traffic flows at signalized intersection based on Haar-Adaboost algorithm and machine learning.Safety Science, 120:248–253, 2019
2019
-
[44]
Pedestrian safety at signalized intersections: Spatial and machine learning approaches.Journal of Transport & Health, 24:101322, 2022
Emre Ku¸ skapan, Mohammad Ali Sahraei, Merve Kayaci Çodur, and Muhammed Yasin Çodur. Pedestrian safety at signalized intersections: Spatial and machine learning approaches.Journal of Transport & Health, 24:101322, 2022
2022
-
[45]
Machine learning applied to road safety modeling: A systematic literature review.Journal of traffic and transportation engineering (English edition), 7(6):775–790, 2020
Philippe Barbosa Silva, Michelle Andrade, and Sara Ferreira. Machine learning applied to road safety modeling: A systematic literature review.Journal of traffic and transportation engineering (English edition), 7(6):775–790, 2020
2020
-
[46]
A recurrent neural network solution for predicting driver intention at unsignalized intersections.IEEE Robotics and Automation Letters, 3(3):1759–1764, 2018
Alex Zyner, Stewart Worrall, and Eduardo Nebot. A recurrent neural network solution for predicting driver intention at unsignalized intersections.IEEE Robotics and Automation Letters, 3(3):1759–1764, 2018
2018
-
[47]
A detection transformer-based intelligent identification method for multiple types of road traffic safety facilities.Sensors, 24(10):3252, 2024
Lingxin Lu, Hui Wang, Yan Wan, and Feifei Xu. A detection transformer-based intelligent identification method for multiple types of road traffic safety facilities.Sensors, 24(10):3252, 2024
2024
-
[48]
Embedded real-time speed limit sign recognition using image processing and machine learning techniques.Neural Computing and Applications, 28(Suppl 1):573–584, 2017
Samuel L Gomes, Elizângela de S Rebouças, Edson Cavalcanti Neto, João P Papa, Victor HC de Albuquerque, Pedro P Rebouças Filho, and Joao Manuel RS Tavares. Embedded real-time speed limit sign recognition using image processing and machine learning techniques.Neural Computing and Applications, 28(Suppl 1):573–584, 2017
2017
-
[49]
Brazilian vehicle identification using a new embedded plate recognition system.Measurement, 70:36–46, 2015
Edson Cavalcanti Neto, Samuel Luz Gomes, Pedro Pedrosa Rebouças Filho, and Victor Hugo C de Albuquerque. Brazilian vehicle identification using a new embedded plate recognition system.Measurement, 70:36–46, 2015
2015
-
[50]
Lynn Scholl, Mohamed Elagaty, Bismarck Ledezma-Navarro, Edgar Zamora, and Luis Miranda-Moreno. A surro- gate video-based safety methodology for diagnosis and evaluation of low-cost pedestrian-safety countermeasures: The case of Cochabamba, Bolivia.Sustainability, 11(17):4737, 2019
2019
-
[51]
Graph neural networks for road safety modeling: Datasets and evaluations for accident analysis.Advances in neural information processing systems, 36:52009–52032, 2023
Abhinav Nippani, Dongyue Li, Haotian Ju, Haris Koutsopoulos, and Hongyang Zhang. Graph neural networks for road safety modeling: Datasets and evaluations for accident analysis.Advances in neural information processing systems, 36:52009–52032, 2023
2023
-
[52]
Semi-Supervised Classification with Graph Convolutional Networks
Thomas N Kipf and Max Welling. Semi-supervised classification with graph convolutional networks.arXiv preprint arXiv:1609.02907, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[53]
MoleculeNet: a benchmark for molecular machine learning.Chemical science, 9(2):513–530, 2018
Zhenqin Wu, Bharath Ramsundar, Evan N Feinberg, Joseph Gomes, Caleb Geniesse, Aneesh S Pappu, Karl Leswing, and Vijay Pande. MoleculeNet: a benchmark for molecular machine learning.Chemical science, 9(2):513–530, 2018
2018
-
[54]
The graph neural network model.IEEE transactions on neural networks, 20(1):61–80, 2008
Franco Scarselli, Marco Gori, Ah Chung Tsoi, Markus Hagenbuchner, and Gabriele Monfardini. The graph neural network model.IEEE transactions on neural networks, 20(1):61–80, 2008
2008
-
[55]
Xiaoyu Mo, Yang Xing, and Chen Lv. Heterogeneous edge-enhanced graph attention network for multi-agent trajectory prediction.arXiv preprint arXiv:2106.07161, 2021
-
[56]
Spatiotemporal scene-graph embedding for autonomous vehicle collision prediction.IEEE Internet of Things Journal, 9(12):9379–9388, 2022
Arnav Vaibhav Malawade, Shih-Yuan Yu, Brandon Hsu, Deepan Muthirayan, Pramod P Khargonekar, and Mohammad Abdullah Al Faruque. Spatiotemporal scene-graph embedding for autonomous vehicle collision prediction.IEEE Internet of Things Journal, 9(12):9379–9388, 2022
2022
-
[57]
Graph neural networks for modelling traffic participant interaction
Frederik Diehl, Thomas Brunner, Michael Truong Le, and Alois Knoll. Graph neural networks for modelling traffic participant interaction. In2019 IEEE Intelligent Vehicles Symposium (IV), pages 695–701. IEEE, 2019
2019
-
[58]
Spatial modeling of urban road traffic using graph theory
Kamaldeep Singh Oberoi, Géraldine Del Mondo, Yohan Dupuis, and Pascal Vasseur. Spatial modeling of urban road traffic using graph theory. InProceedings of Spatial Analysis and GEOmatics (SAGEO) 2017, pages 264–277, 2017
2017
-
[59]
Yuyan Annie Pan et al. Urban intersection traffic flow prediction: A physics-guided stepwise framework utilizing spatio-temporal graph neural network algorithms.Multimodal Transportation, 4(2):100207, 2025
2025
-
[60]
Towards large scale urban traffic reference data: Smart infrastructure in the test area autonomous driving baden-württemberg
Tobias Fleck, Karam Daaboul, Michael Weber, Philip Schörner, Marek Wehmer, Jens Doll, Stefan Orf, Nico Sußmann, Christian Hubschneider, Marc René Zofka et al. Towards large scale urban traffic reference data: Smart infrastructure in the test area autonomous driving baden-württemberg. InIntelligent Autonomous Systems 15: Proceedings of the 15th Internation...
2019
-
[61]
From traffic sensor data to semantic traffic descriptions: The test area autonomous driving baden-württemberg dataset (taf-bw dataset)
Maximilian Zipfl, Tobias Fleck, Marc René Zofka, and J Marius Zöllner. From traffic sensor data to semantic traffic descriptions: The test area autonomous driving baden-württemberg dataset (taf-bw dataset). In2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), pages 1–7. IEEE, 2020
2020
-
[62]
Lanelets: Efficient map representation for autonomous driving
Philipp Bender, Julius Ziegler, and Christoph Stiller. Lanelets: Efficient map representation for autonomous driving. In2014 IEEE Intelligent Vehicles Symposium Proceedings, pages 420–425. IEEE, 2014. 16 APREPRINT- JUNE29, 2026
2014
-
[63]
Lanelet2: A High-Definition Map Framework for the Future of Automated Driving
Fabian Poggenhans, Jan-Hendrik Pauls, Johannes Janosovits, Stefan Orf, Maximilian Naumann, Florian Kuhnt, and Matthias Mayr. Lanelet2: A High-Definition Map Framework for the Future of Automated Driving. InProc. IEEE Intell. Trans. Syst. Conf., Hawaii, USA, November 2018. http://www.mrt.kit.edu/z/publ/download/ 2018/Poggenhans2018Lanelet2.pdf
2018
-
[64]
Openstreetmap: User-generated street maps.IEEE Pervasive computing, 7(4):12–18, 2008
Mordechai Haklay and Patrick Weber. Openstreetmap: User-generated street maps.IEEE Pervasive computing, 7(4):12–18, 2008
2008
-
[65]
Mohammad Shokrolah Shirazi and Brendan Tran Morris. Looking at intersections: a survey of intersection monitoring, behavior and safety analysis of recent studies.IEEE Transactions on Intelligent Transportation Systems, 18(1):4–24, 2016
2016
-
[66]
Analysis of traffic conflicts and collisions
Brian L Allen, B Tom Shin, and Peter J Cooper. Analysis of traffic conflicts and collisions. Technical report, 1978
1978
-
[67]
Traffic conflicts on bicycle paths: A systematic observation of behaviour from video.Accident Analysis & Prevention, 62:358–368, 2014
A Richard A Van der Horst, Maartje de Goede, Stefanie de Hair-Buijssen, and Rob Methorst. Traffic conflicts on bicycle paths: A systematic observation of behaviour from video.Accident Analysis & Prevention, 62:358–368, 2014
2014
-
[68]
Development of traffic safety evaluation method based on simulated conflicts at signalized intersections.Procedia-Social and Behavioral Sciences, 96:881–885, 2013
Huanyun Zhou and Fei Huang. Development of traffic safety evaluation method based on simulated conflicts at signalized intersections.Procedia-Social and Behavioral Sciences, 96:881–885, 2013
2013
-
[69]
Towards traffic scene description: The semantic scene graph
Maximilian Zipfl and J Marius Zöllner. Towards traffic scene description: The semantic scene graph. In2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), pages 3748–3755. IEEE, 2022
2022
-
[70]
The Weisfeiler-Lehman Method and Graph Isomorphism Testing
Brendan L Douglas. The weisfeiler-lehman method and graph isomorphism testing.arXiv preprint arXiv:1101.5211, 2011
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[71]
How Powerful are Graph Neural Networks?
Keyulu Xu, Weihua Hu, Jure Leskovec, and Stefanie Jegelka. How powerful are graph neural networks?arXiv preprint arXiv:1810.00826, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[72]
Petar Veliˇckovi´c, Guillem Cucurull, Arantxa Casanova, Adriana Romero, Pietro Lio, and Yoshua Bengio. Graph attention networks.arXiv preprint arXiv:1710.10903, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[73]
Message passing neural networks
Justin Gilmer, Samuel S Schoenholz, Patrick F Riley, Oriol Vinyals, and George E Dahl. Message passing neural networks. InMachine learning meets quantum physics, pages 199–214. Springer, 2020
2020
-
[74]
Department of Transportation Federal Highway Administration
U.S. Department of Transportation Federal Highway Administration. Next Generation Simulation (NGSIM) Program I-80 Videos. https://data.transportation.gov, 2016, [Dataset]. Provided by ITS DataHub through Data.transportation.gov
2016
-
[75]
Conflict-Based safety evaluations at unsignalized intersections using surrogate safety measures.Heliyon, 10(5), 2024
Dungar Singh, Pritikana Das, and Indrajit Ghosh. Conflict-Based safety evaluations at unsignalized intersections using surrogate safety measures.Heliyon, 10(5), 2024
2024
-
[76]
Review of traffic safety evaluation at T-intersections using surrogate safety measures in developing countries context.IATSS research, 46(3):307–321, 2022
Someswara Rao Bonela and B Raghuram Kadali. Review of traffic safety evaluation at T-intersections using surrogate safety measures in developing countries context.IATSS research, 46(3):307–321, 2022
2022
-
[77]
Exploring pedestrian surrogate safety measures by road geometry at midblock crosswalks: A perspective under mixed traffic conditions.IATSS research, 45(1):87–101, 2021
Avinash Chaudhari, Ninad Gore, Shriniwas Arkatkar, Gaurang Joshi, and Srinivas Pulugurtha. Exploring pedestrian surrogate safety measures by road geometry at midblock crosswalks: A perspective under mixed traffic conditions.IATSS research, 45(1):87–101, 2021
2021
-
[78]
Tamer Bataineh, Nischal Bhattarai, Keshav Jimee, Yibin Zhang, Martin Lucero, Junxuan Zhao, and Hongchao Liu. Evaluating driving behavior and intersection safety using roadside LiDAR: A study of safety indicators across collision metrics.Journal of Transportation Safety & Security, 17(10):1105–1137, 2025
2025
-
[79]
N Mohamed Hasain and Mokaddes Ali Ahmed. Proposing an effective approach for traffic safety assessment on heterogeneous traffic conditions using surrogate safety measures and speed of the involved vehicles.Traffic injury prevention, 25(2):219–227, 2024
2024
-
[80]
Short-term segment-level crash risk prediction using advanced data modeling with proactive and reactive crash data.Applied Sciences, 12(2):856, 2022
Branislav Dimitrijevic, Sina Darban Khales, Roksana Asadi, and Joyoung Lee. Short-term segment-level crash risk prediction using advanced data modeling with proactive and reactive crash data.Applied Sciences, 12(2):856, 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.