Optimizing Agricultural Drone Operations: From Launch and Recovery Siting to Tiered Routing Strategies
Pith reviewed 2026-06-26 16:06 UTC · model grok-4.3
The pith
A p-median heuristic for drone launch siting cuts planning time from over 97 seconds to under 1.2 seconds with only a 4% drop in covered field area.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
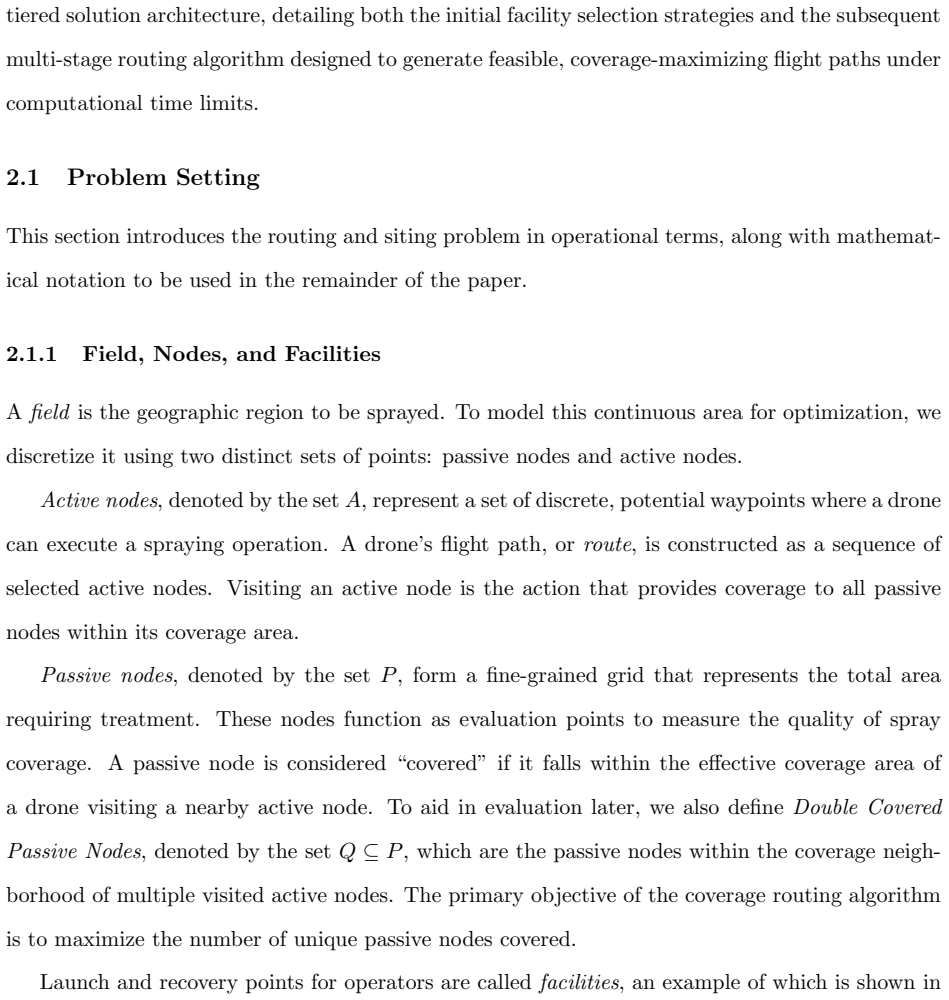
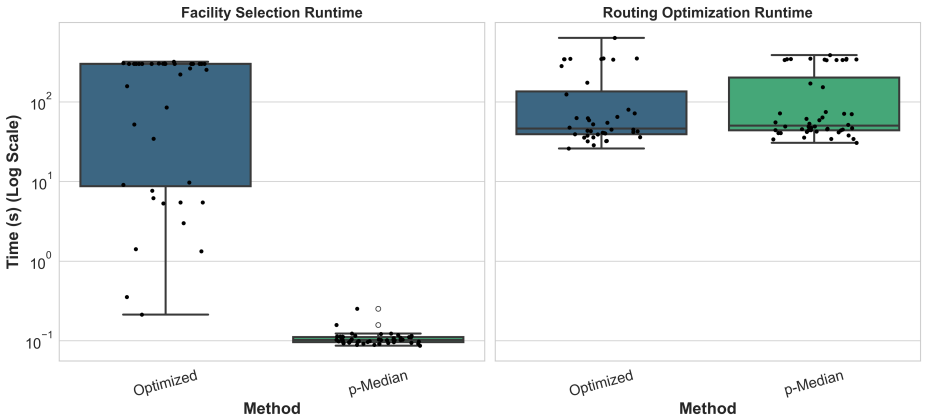
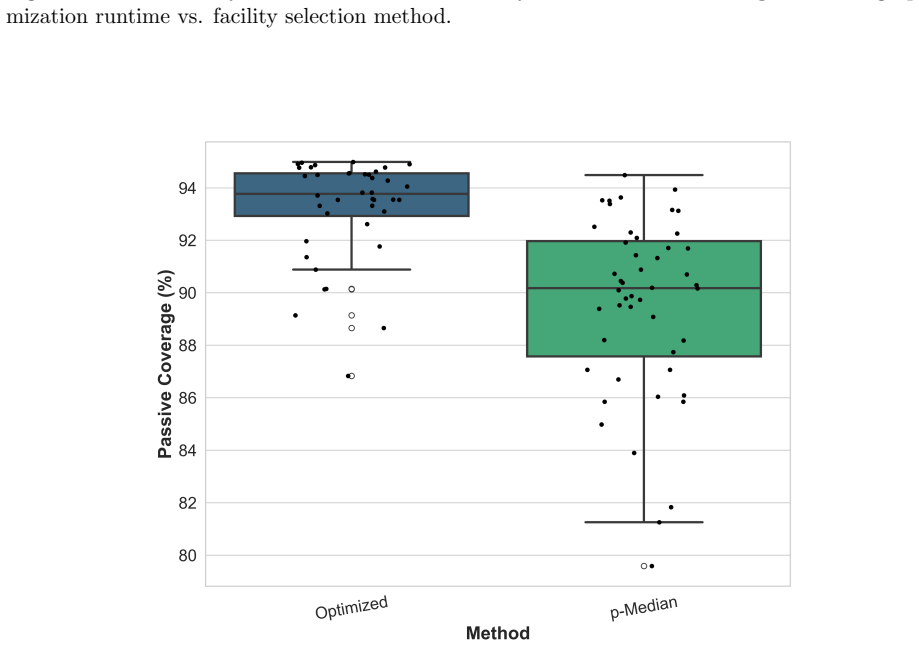
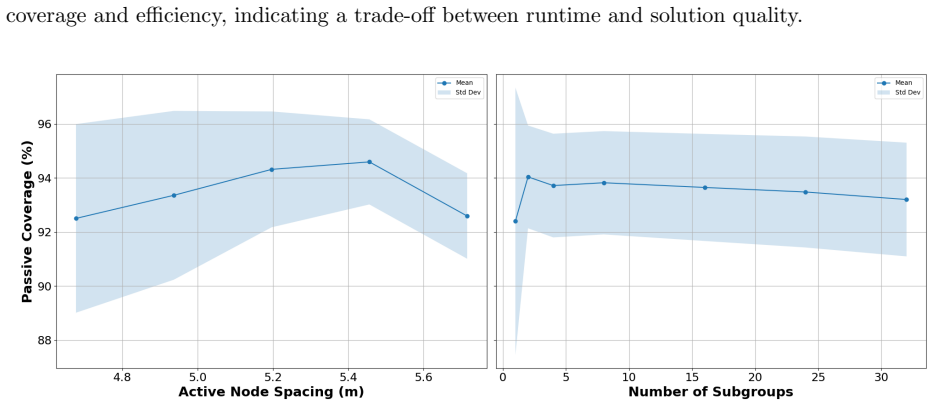
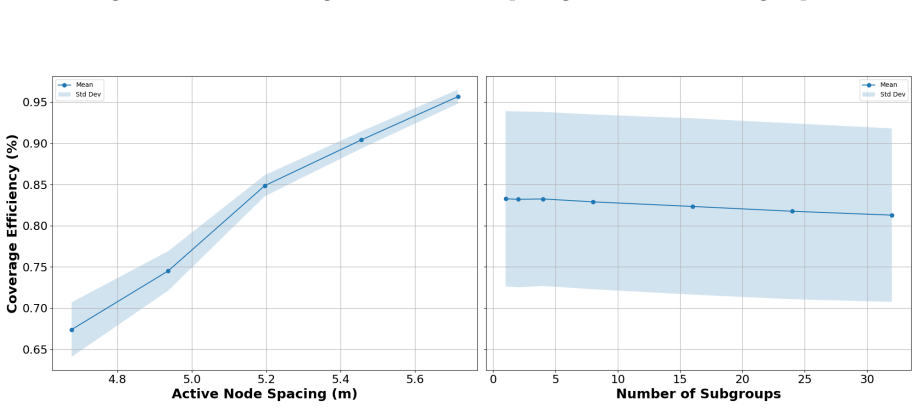
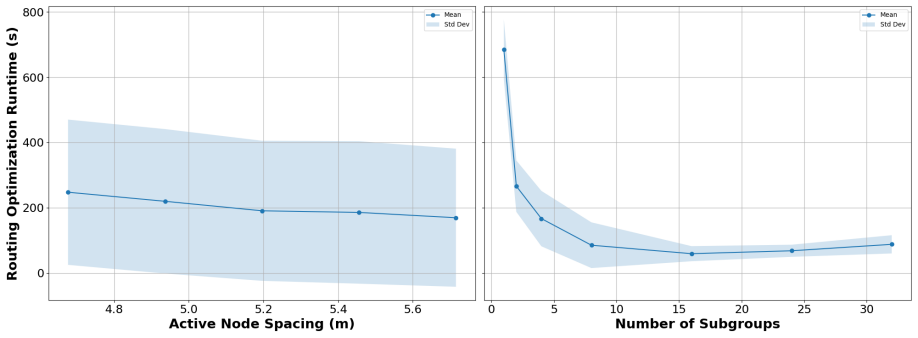
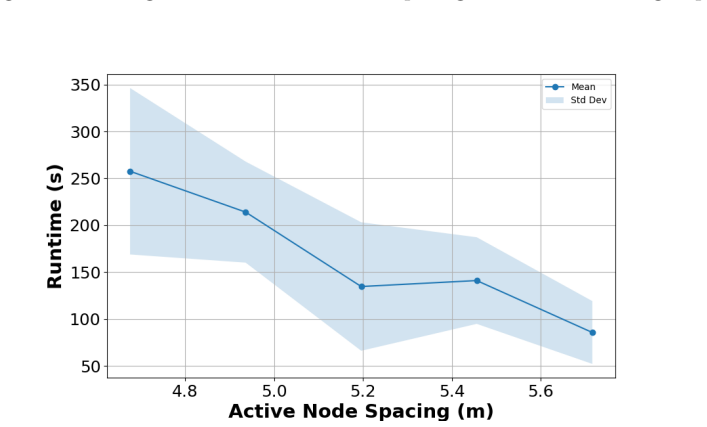
The paper establishes that the p-median heuristic for facility siting reduces runtime by three orders of magnitude from over 97 seconds to under 1.2 seconds with only a 4% reduction in serviced field area compared to the mixed-integer program baseline. For route planning, partitioning the target area into 6 to 8 spatial clusters reduces computation time by an order of magnitude with minimal degradation in serviced area. The resulting framework supports minute-scale planning on commodity hardware.
What carries the argument
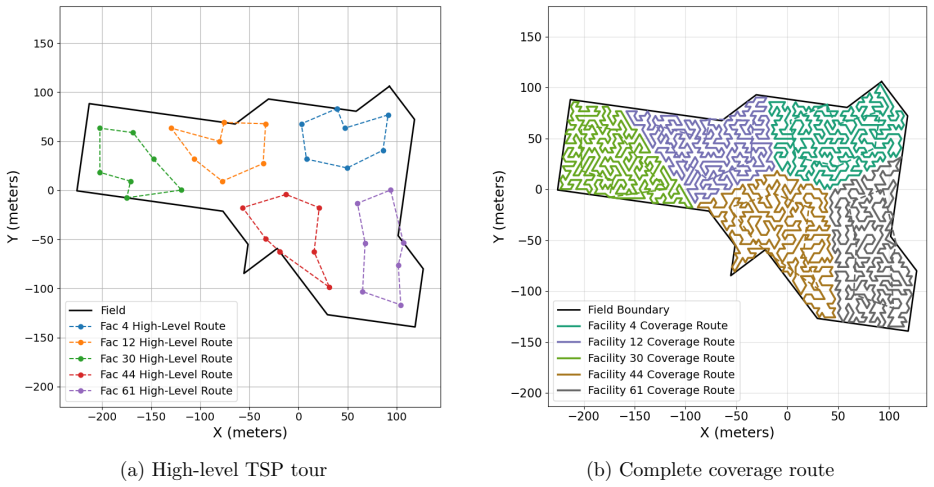
p-median heuristic for selecting launch and recovery sites to minimize total distance to fields, paired with tiered decomposition of the routing problem into 6-8 spatial clusters.
If this is right
- Daily spraying plans become computable in minutes on standard hardware instead of requiring longer runtimes.
- The approach scales to larger numbers of fields without specialized computing resources.
- Small reductions in covered area are acceptable when offset by large gains in planning speed.
- Optimization tools move from research prototypes to practical daily decision support for drone operations.
Where Pith is reading between the lines
- Adding weather constraints to the siting and routing steps could reduce the risk that plans become unusable on the day of operation.
- Testing the 6-8 cluster choice on a broader set of irregular field layouts would show how stable the speed-accuracy trade-off remains.
- Solving siting and routing together in one model might recover some of the 4% coverage that is currently traded for speed.
Load-bearing premise
That the 4% coverage loss and the performance of 6-8 clusters will remain acceptable when the methods are applied to field geometries and conditions outside the tested instances.
What would settle it
Running the p-median heuristic and exact MIP on a fresh collection of real farm fields with different shapes and sizes, then checking whether runtime savings stay near three orders of magnitude and coverage loss stays near 4%.
Figures

read the original abstract
Drones are increasingly used in agriculture, where tight margins demand efficient planning. Current optimization tools suffer from exponential runtimes as problem sizes grow, necessitating practical heuristics for daily operations. This paper presents an operational framework and benchmarking analysis for drone spraying operations. We evaluate the trade-offs between facility siting methods and tiered routing parameters. For facility siting, comparing a Mixed-Integer Program (MIP) baseline against a $p$-Median heuristic shows that the heuristic reduces runtime by three orders of magnitude, from over 97 seconds to under 1.2 seconds, with only a 4\% reduction in serviced field area. For route planning, a tiered problem decomposition approach partitioning the target area into 6 to 8 spatial clusters reduces computation time by an order of magnitude with minimal degradation in serviced area. This framework achieves minute-scale planning on commodity hardware, demonstrating operational relevance. Future research will incorporate weather modeling, integrated optimization of facility location and routing, and validation across diverse field geometries.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an operational framework for agricultural drone spraying operations. It benchmarks a p-median heuristic against a mixed-integer program (MIP) baseline for launch and recovery facility siting, and evaluates a tiered routing strategy that decomposes the target area into 6-8 spatial clusters. The central empirical claims are that the p-median heuristic reduces runtime from over 97 seconds to under 1.2 seconds with only a 4% reduction in serviced field area, while the tiered decomposition reduces computation time by an order of magnitude with minimal degradation in serviced area, enabling minute-scale planning on commodity hardware.
Significance. If the reported runtime-coverage trade-offs prove reproducible, the work supplies practical, scalable heuristics that bridge exact optimization and daily operational use in agriculture. The explicit numerical comparisons (three-order-of-magnitude speed-up for siting, order-of-magnitude reduction for routing) constitute concrete evidence of operational relevance on the tested instances.
major comments (2)
- [Abstract] Abstract: the performance claims (runtime reduction from >97 s to <1.2 s with 4 % area loss; order-of-magnitude improvement for 6-8 clusters) are presented without any description of the underlying test instances, including number of fields, field geometries, instance sizes, or data sources. These details are load-bearing for assessing whether the reported deltas are representative or stable.
- [Abstract] Abstract: the statement that the tiered decomposition yields 'minimal degradation in serviced area' is not accompanied by quantitative metrics (e.g., exact percentage loss per cluster count) or by the method used to form the spatial clusters, preventing evaluation of the robustness of the 6-8 cluster recommendation.
Simulated Author's Rebuttal
We thank the referee for the detailed feedback on the abstract. The comments correctly identify opportunities to improve clarity by adding context on test instances and quantitative metrics. We will revise the abstract to address both points while preserving the manuscript's core claims and length constraints.
read point-by-point responses
-
Referee: [Abstract] Abstract: the performance claims (runtime reduction from >97 s to <1.2 s with 4 % area loss; order-of-magnitude improvement for 6-8 clusters) are presented without any description of the underlying test instances, including number of fields, field geometries, instance sizes, or data sources. These details are load-bearing for assessing whether the reported deltas are representative or stable.
Authors: We agree that the abstract would benefit from a concise description of the test instances to contextualize the performance claims. In the revised version we will insert a short clause summarizing the instance characteristics (number of fields, representative geometries, scale, and data provenance) drawn from the experimental section, enabling readers to evaluate representativeness without expanding the abstract beyond its current scope. revision: yes
-
Referee: [Abstract] Abstract: the statement that the tiered decomposition yields 'minimal degradation in serviced area' is not accompanied by quantitative metrics (e.g., exact percentage loss per cluster count) or by the method used to form the spatial clusters, preventing evaluation of the robustness of the 6-8 cluster recommendation.
Authors: We concur that replacing the qualitative phrase with explicit metrics and a brief mention of the clustering approach would strengthen the abstract. The revision will report the observed area-loss percentages for the 6- and 8-cluster cases (as quantified in the results) and indicate the spatial partitioning method, thereby making the 6-8 cluster recommendation more transparent while remaining within abstract length limits. revision: yes
Circularity Check
No circularity: empirical runtime and coverage deltas from direct computation
full rationale
The paper reports explicit computational comparisons (MIP baseline vs. p-median heuristic; tiered 6-8 cluster decomposition) on its test instances, giving concrete runtime reductions (97s to 1.2s; order-of-magnitude) and area losses (4%). No equations, fitted parameters, self-citations, or ansatzes are invoked to derive these deltas; they are measured outputs. The manuscript itself notes the results are instance-specific and flags future validation on other geometries, confirming the claims do not reduce to self-definition or prediction-by-construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Eye in the sky: 360° inspection of bridge infrastructure using uncrewed aerial vehicles,
S. S. C. Congress, J. Escamilla III, H. Chimauriya, and A. J. Puppala, “Eye in the sky: 360° inspection of bridge infrastructure using uncrewed aerial vehicles,”Transportation Research Record, 2024.doi:10.1177/03611981231185138
-
[2]
Uav-based wildland fire air toxics data collection and analysis,
P. Ragbir et al., “Uav-based wildland fire air toxics data collection and analysis,”Sensors, vol. 23, no. 7, p. 3561, 2023.doi:10.3390/s23073561
-
[3]
Unmanned aerial vehicles for search and rescue: A survey,
Z. Lyu et al., “Unmanned aerial vehicles for search and rescue: A survey,”Remote Sensing, vol. 15, no. 13, p. 3266, 2023.doi:10.3390/rs15133266
-
[4]
Spatial coverage in routing and path planning problems,
K. Glock and A. Meyer, “Spatial coverage in routing and path planning problems,”European Journal of Operational Research, vol. 305, no. 1, pp. 1–20, 2023.doi:10.1016/j.ejor.2022. 02.031
-
[5]
W. K. Mennell,Heuristics for solving three routing problems: Close-enough traveling sales- man problem, close-enough vehicle routing problem, and sequence-dependent team orienteer- ing problem. University of Maryland, College Park, 2009. [Online]. Available:http://hdl. handle.net/1903/9822
2009
-
[6]
Decomposition strategies for vehicle routing heuristics,
A. Santini, M. Schneider, T. Vidal, and D. Vigo, “Decomposition strategies for vehicle routing heuristics,”INFORMS Journal on Computing, vol. 35, no. 3, pp. 543–559, 2023.doi:10. 1287/ijoc.2023.1288
arXiv 2023
-
[7]
The covering salesman problem,
J. R. Current and D. A. Schilling, “The covering salesman problem,”Transportation Science, vol. 23, no. 3, pp. 208–213, 1989.doi:10.1287/trsc.23.3.208
-
[8]
M. Gendreau, G. Laporte, and F. Semet, “The covering tour problem,”Operations Research, vol. 45, no. 4, pp. 568–576, 1997.doi:10.1287/opre.45.4.568 29
-
[9]
An integer-programming-based approach to the close-enough traveling salesman problem,
B. Behdani and J. C. Smith, “An integer-programming-based approach to the close-enough traveling salesman problem,”INFORMS Journal on Computing, vol. 26, no. 3, pp. 415–432, 2014.doi:10.1287/ijoc.2013.0574
-
[10]
A branch-and-bound algorithm for the close-enough traveling salesman problem,
W. P. Coutinho, R. Martinelli, and R. S. de Camargo, “A branch-and-bound algorithm for the close-enough traveling salesman problem,”INFORMS Journal on Computing, vol. 28, no. 4, pp. 772–787, 2016.doi:10.1287/ijoc.2016.0711
-
[11]
Hierarchical coverage path planning in com- plex 3d environments,
C. Cao, J. Zhang, M. Travers, and H. Choset, “Hierarchical coverage path planning in com- plex 3d environments,” in2020 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2020, pp. 8437–8443.doi:10.1109/ICRA40945.2020.9196575
-
[12]
Maximum coverage capacitated facility location problem with range constrained drones,
D. Chauhan, A. Unnikrishnan, and M. Figliozzi, “Maximum coverage capacitated facility location problem with range constrained drones,”Transportation Research Part C: Emerging Technologies, vol. 99, pp. 1–18, 2019.doi:10.1016/j.trc.2018.12.001
-
[13]
The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery,
C. C. Murray and A. G. Chu, “The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery,”Transportation Research Part C: Emerging Technologies, vol. 54, pp. 86–109, 2015.doi:10.1016/j.trc.2015.03.005
-
[14]
The drone-assisted vehicle routing problem with robot stations,
A. Morim, G. Campuzano, P. Amorim, M. Mes, and E. Lalla-Ruiz, “The drone-assisted vehicle routing problem with robot stations,”Expert Systems with Applications, vol. 238, p. 121 741, 2024.doi:10.1016/j.eswa.2023.121741
-
[15]
Drones for automated parcel delivery: Use case exploration and analysis,
S. Zieher et al., “Drones for automated parcel delivery: Use case exploration and analysis,” Case Studies on Transport Policy, vol. 12, p. 101 253, 2024.doi:10.1016/j.trip.2024. 101253
-
[16]
Research on collaborative delivery path planning for trucks and drones in parcel delivery,
T. Fu, S. Li, and Z. Li, “Research on collaborative delivery path planning for trucks and drones in parcel delivery,”Sensors, vol. 25, no. 10, p. 3087, 2025.doi:10.3390/s25103087
-
[17]
Optimizing an on-demand delivery mode based on trucks and drones,
L. Zhen, J. Gao, S. Wang, L. Gilbert, and X. Yue, “Optimizing an on-demand delivery mode based on trucks and drones,”Transportation Science, 2025.doi:10.1287/trsc.2024.0693
-
[18]
A method for solving traveling-salesman problems,
G. A. Croes, “A method for solving traveling-salesman problems,”Operations Research, vol. 6, no. 6, pp. 791–812, 1958.doi:10.1287/opre.6.6.791 30
-
[19]
An effective heuristic algorithm for the traveling-salesman problem,
S. Lin and B. W. Kernighan, “An effective heuristic algorithm for the traveling-salesman problem,”Operations Research, vol. 21, no. 2, pp. 498–516, 1973.doi:10.1287/opre.21.2. 498
-
[20]
A review on the state of the art in copter drones and flight control systems,
J. Peksa and D. Mamchur, “A review on the state of the art in copter drones and flight control systems,”Sensors, vol. 24, no. 11, p. 3349, 2024.doi:10.3390/s24113349
-
[21]
J. Silberstein, R. Sasse, M. K. Harjam¨ aki, et al., “Deployment of a fixed-wing small uncrewed aircraft system for urban traffic–related air pollution assessment,”Journal of Atmospheric and Oceanic Technology, 2025.doi:10.1175/JTECH-D-24-0042.1
-
[22]
E. Mitridis et al., “An evaluation of fixed-wing unmanned aerial vehicle trends and corre- lations with respect to nato classification, region, eis date and operational specifications,” Aerospace, vol. 10, no. 1, p. 53, 2023.doi:10.3390/aerospace10040382
-
[23]
A review on uav-based applications for precision agriculture,
D. C. Tsouros, S. Bibi, and P. G. Sarigiannidis, “A review on uav-based applications for precision agriculture,”Information, vol. 10, no. 11, p. 349, 2019.doi:10.3390/info10110349
-
[24]
F. A. Lara-Molina et al., “Optimization of coverage path planning for agricultural drones in weed-infested fields using semantic segmentation,”Agriculture, vol. 15, no. 12, p. 1262, 2025. doi:10.3390/agriculture15121262
-
[25]
Deep learning-based weed detection using uav images: A comparative study,
T. B. Shahi, S. Dahal, C. Sitaula, A. Neupane, and W. Guo, “Deep learning-based weed detection using uav images: A comparative study,”Drones, vol. 7, no. 10, p. 624, 2023.doi: 10.3390/drones7100624
-
[26]
P. Wang et al., “A novel path planning approach for plant protection uav based on ddpg and ila optimization algorithm,”Computers and Electronics in Agriculture, vol. 239, p. 111 006, 2025.doi:https://doi.org/10.1016/j.compag.2025.111006
-
[27]
Integration of uav-LiDAR and uav-photogrammetry for infrastructure monitoring and bridge assessment,
F. Gaspari, F. Ioli, F. Barbieri, E. Belcore, and L. Pinto, “Integration of uav-LiDAR and uav-photogrammetry for infrastructure monitoring and bridge assessment,” inThe Interna- tional Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. XLIII-B2-2022, 2022, pp. 995–1002.doi:10.5194/isprs-archives-XLIII-B2-2022- 995-2022 31
-
[28]
Uav photogramme- try for concrete bridge inspection using object-based image analysis (obia),
S. Zollini, M. Alicandro, D. Dominici, R. Quaresima, and M. Giallonardo, “Uav photogramme- try for concrete bridge inspection using object-based image analysis (obia),”Remote Sensing, vol. 12, no. 19, p. 3180, 2020.doi:10.3390/rs12193180
-
[29]
Supporting search and rescue operations with uavs,
S. Waharte and N. Trigoni, “Supporting search and rescue operations with uavs,” in2010 IEEE International Conference on Emerging Security Technologies (EST), 2010, pp. 142–147. doi:10.1109/EST.2010.31
-
[30]
Aerial person detection for search and rescue: A survey,
X. Zhang et al., “Aerial person detection for search and rescue: A survey,”Journal of Remote Sensing, vol. 9, p. 0474, 2025.doi:10.34133/remotesensing.0474
-
[31]
Robust air-to-air channel model for swarms of drones in sar missions,
S. Shaheen, W. Saad, et al., “Robust air-to-air channel model for swarms of drones in sar missions,”IEEE Access, vol. 11, pp. 68 890–68 896, 2023.doi:10 . 1109 / ACCESS . 2023 . 3292517
2023
-
[32]
A. Bouguettaya, H. Zarzour, A. M. Taberkit, and A. Kechida, “A review on early wildfire de- tection from unmanned aerial vehicles using deep learning-based computer vision algorithms,” Signal Processing, vol. 190, p. 108 309, 2022.doi:10.1016/j.sigpro.2021.108309
-
[33]
Remote sens- ing applications for prescribed burn research: A review,
A. LoPresti, M. T. Hayden, K. Siegel, B. Poulter, E. N. Stavros, and L. E. Dee, “Remote sens- ing applications for prescribed burn research: A review,”International Journal of Wildland Fire, vol. 33, WF23130, 2024.doi:10.1071/WF23130
-
[34]
Integer programming formulation of traveling salesman problems,
C. E. Miller, A. W. Tucker, and R. A. Zemlin, “Integer programming formulation of traveling salesman problems,”Journal of the ACM (JACM), vol. 7, no. 4, pp. 326–329, 1960.doi: 10.1145/321043.321046
-
[35]
Computer solutions of the traveling salesman problem,
S. Lin, “Computer solutions of the traveling salesman problem,”Bell System Technical Jour- nal, vol. 44, no. 10, pp. 2245–2269, 1965.doi:10.1002/j.1538-7305.1965.tb04146.x
-
[36]
Machine learning and optimization pipeline for agricultural drone aerial imaging operations,
X. Ni et al., “Machine learning and optimization pipeline for agricultural drone aerial imaging operations,” Jul. 2024.doi:10.2514/6.2024-3657 32 Table 4: Performance Metrics (Mean±Std. Dev.) vs. Grid Spacing and Number of Subgroups. Subgroups Runtime (s) Coverage (%) Efficiency (%) Active Node Spacing: 4.68 m 1 706.95±93.79 89.03±7.66 0.68±0.04 2 351.02±...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.