Denoising ICF Images with Multiplicative Uniform Noise: A Self-Supervised Study Based on the Log-Domain Noisier2Inverse Framework
Pith reviewed 2026-06-29 00:34 UTC · model grok-4.3
The pith
Minimising the log-domain self-supervised loss is equivalent to supervised learning in the transformed domain for multiplicative uniform noise.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
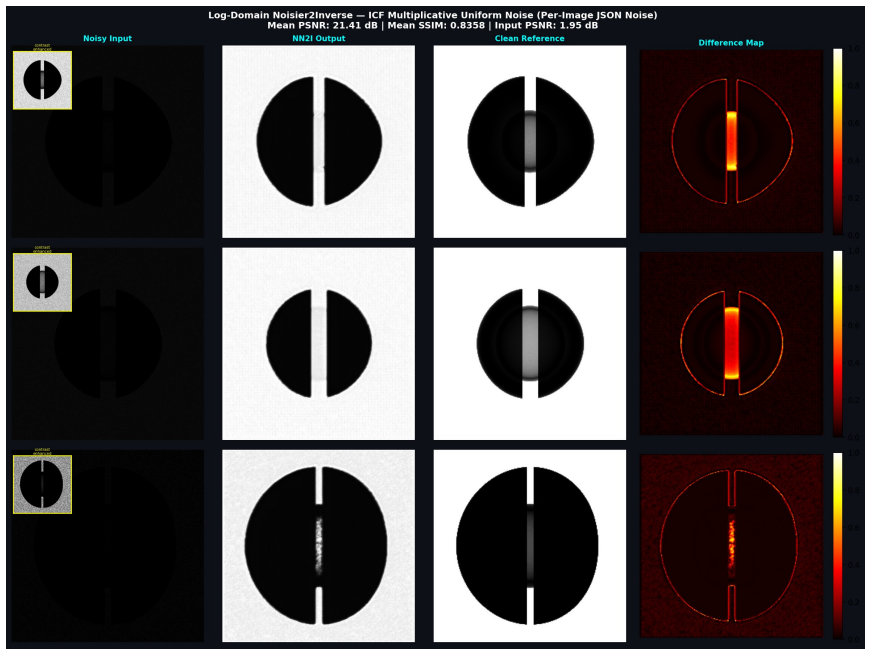
The central claim is that minimising the log-domain self-supervised loss is equivalent to supervised learning in the transformed domain, with a full proof provided. The log-domain Noisier2Inverse framework is developed and applied to ICF images corrupted by multiplicative uniform noise, with per-image JSON noise loading yielding the best results of 21.41 dB PSNR and 0.8358 SSIM after fixes for the unique characteristics of the imagery.
What carries the argument
The Log-Domain Noisier2Inverse framework, which applies a log transform to convert multiplicative uniform noise into an additive problem and uses a self-supervised loss whose minimum matches supervised training in the transformed domain.
If this is right
- Self-supervised training can replace supervised training for this noise class without loss of optimality after the transform.
- The framework applies to any imagery where multiplicative uniform noise dominates, using only noisy inputs during learning.
- Quantitative gains of roughly 19 dB PSNR over the noisy baseline become achievable with no clean data required at train time.
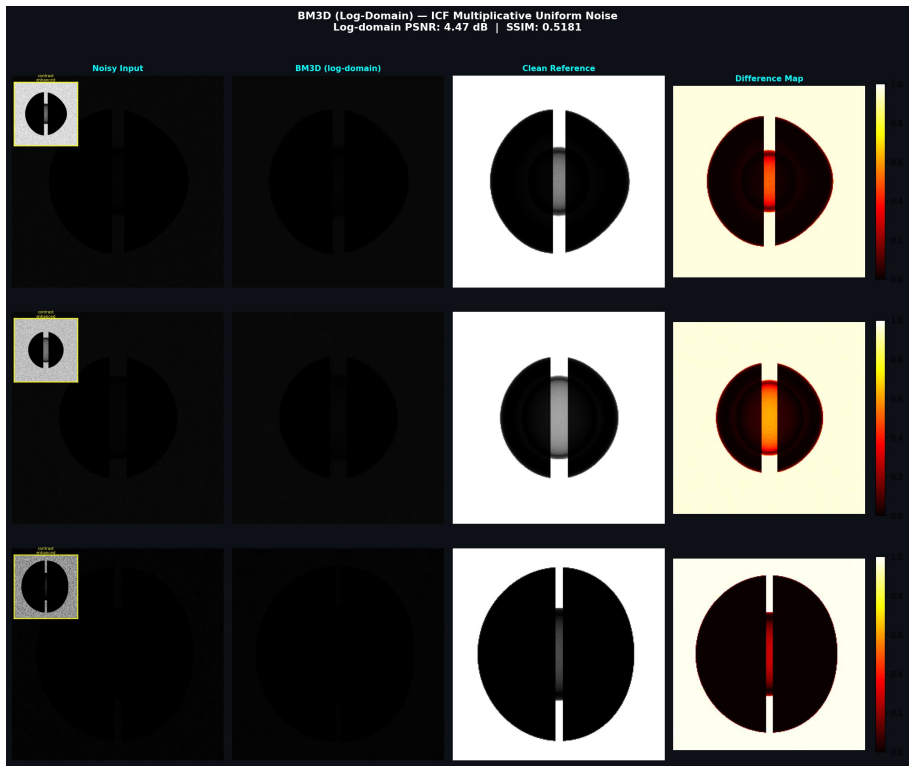
- Classical methods such as BM3D remain inferior even after the same log-domain preprocessing.
Where Pith is reading between the lines
- The equivalence may extend to other monotonic transforms that turn multiplicative noise additive, provided the proof conditions on the loss still hold.
- If ICF images contain a mixture of noise types, a hybrid model that first estimates the uniform component could preserve the self-supervised optimality.
- The same log-domain construction could be tested on other scientific imaging domains that record multiplicative sensor noise, such as certain astronomical or medical modalities.
Load-bearing premise
The multiplicative uniform noise model accurately describes the corruption in ICF images and the log transform preserves the conditions needed for the equivalence proof to hold.
What would settle it
A direct comparison on synthetic data where the noise deviates from multiplicative uniform: if the self-supervised loss minimum no longer matches the supervised optimum after the log transform, or if performance gains disappear, the equivalence claim fails.
Figures
read the original abstract
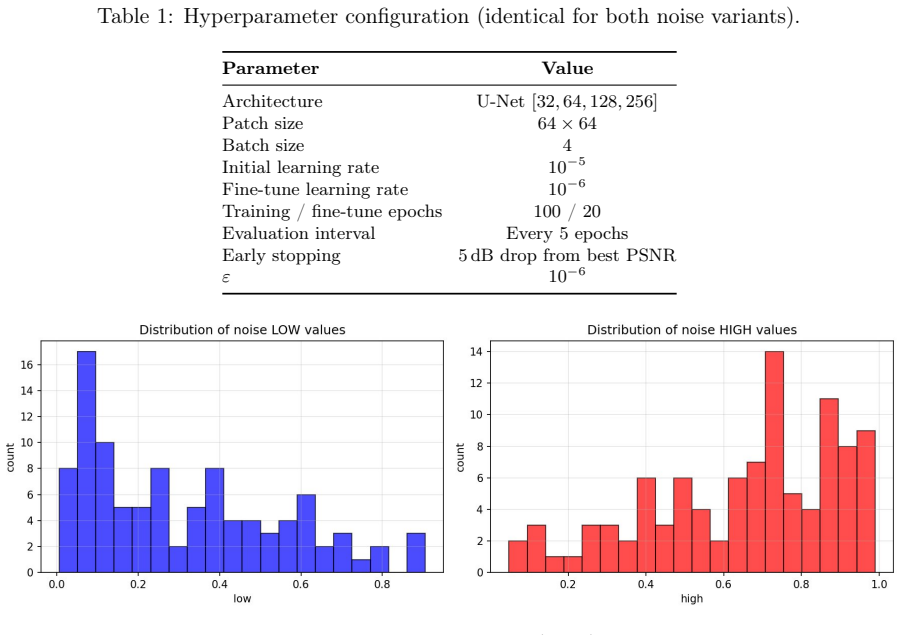
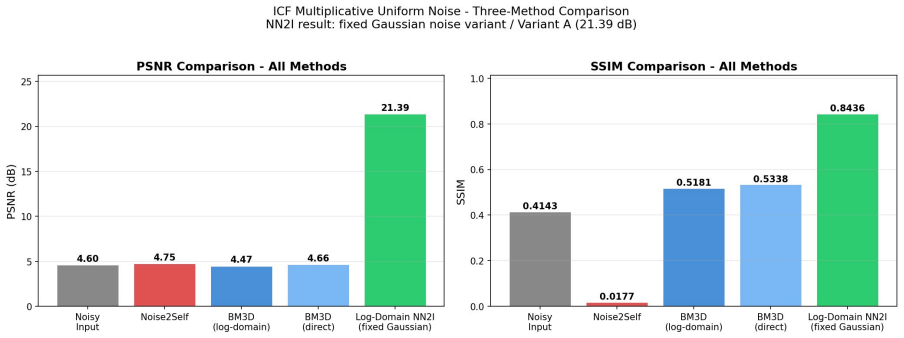
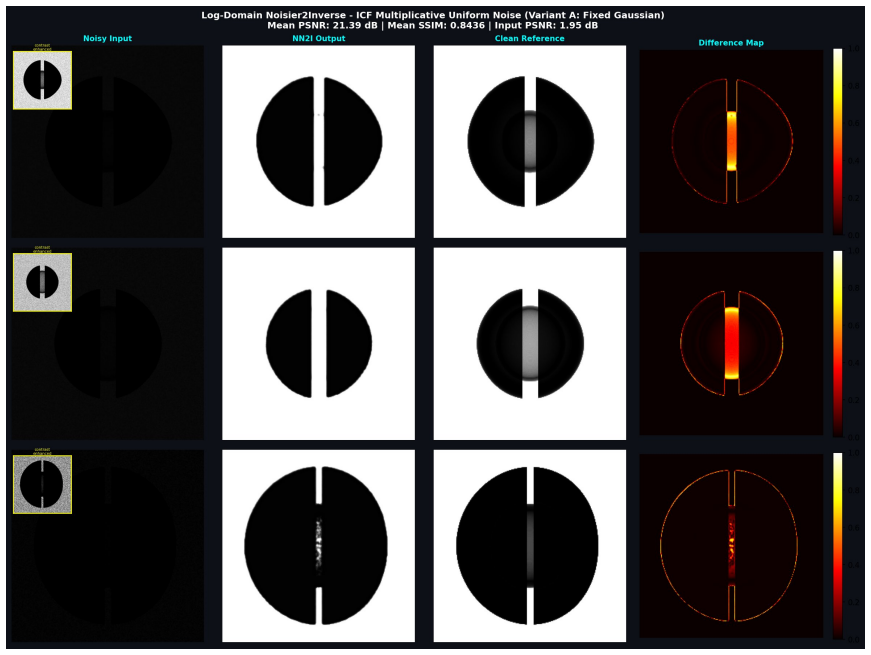
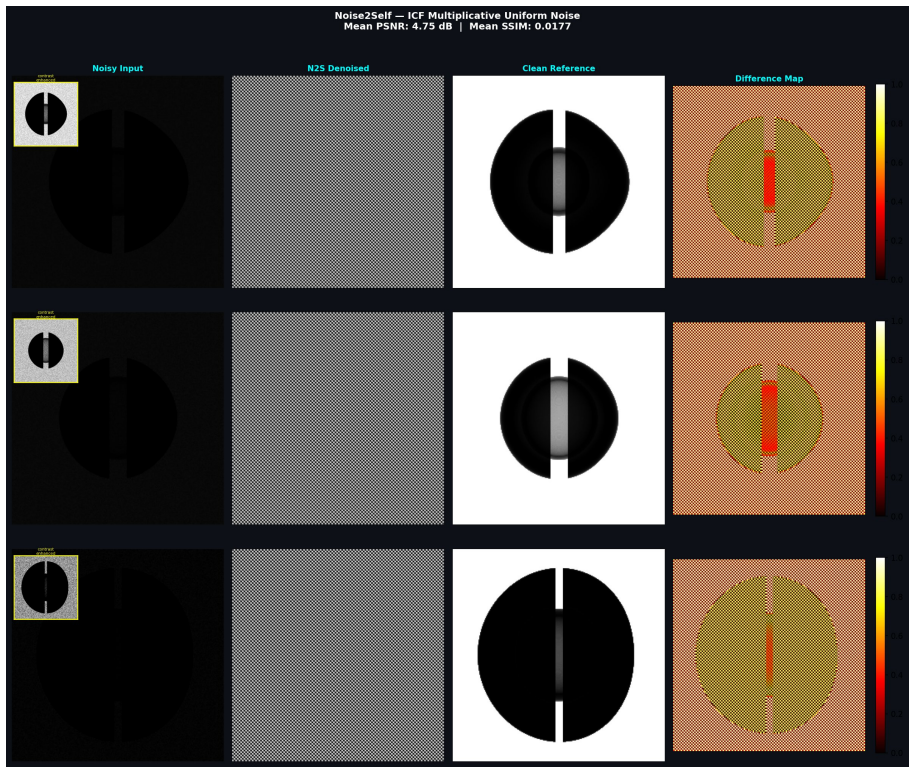
This paper documents the implementation and evaluation of a self-supervised denoising framework on Inertial Confinement Fusion (ICF) images corrupted by Multiplicative Uniform noise: the \emph{Log-Domain Noisier2Inverse} framework. This framework is developed and analysed in this work; the key theoretical result -- that minimising the log-domain self-supervised loss is equivalent to supervised learning in the transformed domain -- is presented with full proof. We document significant implementation challenges arising from the unique characteristics of ICF imagery, describe the fixes applied at each stage, and report final quantitative results. The log-domain approach with per-image JSON Uniform noise loading (Variant~B) achieves the best result: a mean PSNR of $21.41\db$ and SSIM of $0.8358$, a $+19.46\db$ improvement over the noisy input baseline of $1.95\db$, substantially outperforming BM3D log-domain ($4.47\db$, SSIM $0.5181$) and Noise2Self ($4.75\db$, SSIM $0.0177$). Variant~A, using fixed Gaussian noise loading, achieves $21.39\db$ PSNR and SSIM $0.8436$. Of the three evaluated methods, Log-Domain Noisier2Inverse and Noise2Self are entirely self-supervised during training, requiring no clean ground truth data; BM3D is a classical filter-based method requiring no training at all. The clean reference images are used solely for quantitative evaluation of all three methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents the Log-Domain Noisier2Inverse framework for self-supervised denoising of ICF images corrupted by multiplicative uniform noise. It claims that minimizing the log-domain self-supervised loss is equivalent to supervised learning in the transformed domain and provides a full proof of this equivalence. The work documents ICF-specific implementation challenges and fixes, then reports quantitative results where Variant B (per-image JSON Uniform noise loading) achieves mean PSNR 21.41 dB and SSIM 0.8358, outperforming log-domain BM3D (4.47 dB, 0.5181) and Noise2Self (4.75 dB, 0.0177); Variant A reaches 21.39 dB PSNR and 0.8436 SSIM. Clean references are used only for evaluation.
Significance. If the equivalence holds under the log-uniform noise model, the work supplies a theoretically grounded, fully self-supervised method with concrete gains on a specialized scientific imaging task. The reported +19.46 dB improvement and explicit comparison to two baselines constitute a falsifiable empirical contribution; the provision of a full proof (rather than a reduction to fitted parameters) is a positive feature.
major comments (1)
- [Theoretical analysis section (equivalence proof)] Theoretical analysis section (equivalence proof): the claim that the log-domain self-supervised loss equals supervised learning in the transformed domain requires that the additive noise log(U), U~Uniform[0,1], satisfies the independence, zero-mean, and moment conditions used in the original Noisier2Inverse derivation. The manuscript presents an adapted proof but does not explicitly re-derive or verify each intermediate identity after substituting the pdf of log(U); if any step fails for this non-Gaussian, asymmetric distribution, the central equivalence does not apply to the stated noise model.
minor comments (2)
- [Abstract and results section] Abstract and results section: the reported PSNR/SSIM values are given to two decimal places without accompanying standard deviations or number of test images, making it difficult to assess statistical significance of the 0.02 dB difference between Variant A and Variant B.
- [Implementation section] Implementation section: the description of 'per-image JSON Uniform noise loading' (Variant B) would benefit from an explicit equation showing how the per-image parameters enter the loss, to clarify the distinction from the fixed Gaussian loading in Variant A.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review. We address the single major comment below and will revise the manuscript accordingly to strengthen the presentation of the theoretical result.
read point-by-point responses
-
Referee: Theoretical analysis section (equivalence proof): the claim that the log-domain self-supervised loss equals supervised learning in the transformed domain requires that the additive noise log(U), U~Uniform[0,1], satisfies the independence, zero-mean, and moment conditions used in the original Noisier2Inverse derivation. The manuscript presents an adapted proof but does not explicitly re-derive or verify each intermediate identity after substituting the pdf of log(U); if any step fails for this non-Gaussian, asymmetric distribution, the central equivalence does not apply to the stated noise model.
Authors: We agree that making the substitution explicit strengthens the exposition. The manuscript's adapted proof relies on the fact that log(U) remains independent of the underlying signal (by construction of the multiplicative model), possesses all finite moments on (0,1), and that the self-supervised loss structure carries over once the additive noise term is substituted. To directly address the referee's concern, the revised manuscript will expand the theoretical analysis section with a step-by-step re-derivation of the key identities after inserting the pdf of log(U), explicitly verifying each condition (including handling of the non-zero mean of log(U) via the loss formulation) and confirming that no step fails for this distribution. revision: yes
Circularity Check
No circularity: central equivalence presented as independent full proof
full rationale
The manuscript states that the key theoretical result (minimising the log-domain self-supervised loss is equivalent to supervised learning in the transformed domain) is presented with a full proof developed in this work. No equations, fitted parameters, or self-citations are shown reducing any prediction or claim to its own inputs by construction. Evaluation metrics use clean references solely for post-hoc assessment, not training or derivation. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The corruption follows a multiplicative uniform noise model
Reference graph
Works this paper leans on
-
[1]
Naheed, B
N. Naheed, B. T. Wolfe, and Z. Wang, Noise Classification of ICF Images Using a Convolu- tional Neural Network (CNN),Asia Mathematika, 7(2):27–34, 2023
2023
-
[2]
C. R. Harris, K. J. Millman, S. J. van der Walt, R. Gommers, P. Virtanen, D. Cournapeau, E. Wieser, J. Taylor, S. Berg, N. J. Smith, R. Kern, M. Picus, S. Hoyer, M. H. van Kerkwijk, M. Brett, A. Haldane, J. F. del Río, M. Wiebe, P. Peterson, P. Gérard-Marchant, K. Sheppard, T. Reddy, W. Weckesser, H. Abbasi, C. Gohlke, and T. E. Oliphant, Array programmin...
-
[3]
Lehtinen, J
J. Lehtinen, J. Munkberg, J. Hasselgren, S. Laine, T. Karras, M. Aittala, and T. Aila, Noise2Noise: Learning Image Restoration without Clean Data, InProceedings of ICML, 2018
2018
-
[4]
Moran, D
N. Moran, D. Schmidt, Y. Zhong, and P. Coady, Noisier2Noise: Learning to Denoise from Unpaired Noisy Data, InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 12064–12072, 2020. 11 Figure 5: BM3D (log-domain) results on ICF Multiplicative Uniform noise. Columns (left to right): noisy input (with contrast-enhance...
2020
-
[5]
N. Gruber, J. Schwab, M. Haltmeier, A. Biguri, C. Dlaska, and G. Hwang, Noisier2Inverse: Self-Supervised Learning for Image Reconstruction With Correlated Noise,IEEE Access, 13:139445–139459, 2025. DOI: 10.1109/ACCESS.2025.3596557
-
[6]
Batson and L
J. Batson and L. Royer, Noise2Self: Blind Denoising by Self-Supervision, InProceedings of ICML, 2019
2019
-
[7]
Ronneberger, P
O. Ronneberger, P. Fischer, and T. Brox, U-Net: Convolutional Networks for Biomedical Image Segmentation, InMICCAI, 2015
2015
-
[8]
Dabov, A
K. Dabov, A. Foi, V. Katkovnik, and K. Egiazarian, Image Denoising by Sparse 3-D Transform-Domain Collaborative Filtering,IEEE Trans. Image Processing, 16(8):2080–2095, 2007
2080
-
[9]
Krull, T.-O
A. Krull, T.-O. Buchholz, and F. Jug, Noise2Void – Learning Denoising from Single Noisy Images, InCVPR, 2019. 12 Figure 6: Noise2Self results. Columns (left to right): noisy input (with contrast-enhanced inset), N2S denoised output, clean reference, difference map (yellow/white=high residual). Checkerboard artifacts dominate the denoised output in all thr...
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.