Beyond Additivity: Causal Discovery in Location-Scale Noise Models with Hidden Variables
Pith reviewed 2026-06-27 19:14 UTC · model grok-4.3
The pith
Under location-scale noise models, bow-free acyclic directed mixed graphs with hidden variables are identifiable from observational data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Acyclic directed mixed graphs that satisfy the bow-free condition are identifiable under location-scale noise models even when hidden variables are present; this is the first identifiability result for causally insufficient models that goes beyond additive noise. Sufficient conditions are also given for identifying causal directions when the bow-free assumption is dropped. The two-stage LSNM-UV algorithm recovers the graph and is shown to be sound and complete.
What carries the argument
The bow-free condition on acyclic directed mixed graphs (ADMGs) under location-scale noise models, which uses variance modulation to break symmetries that additive noise leaves intact.
If this is right
- The LSNM-UV algorithm recovers the underlying ADMG from observational data when the bow-free condition holds.
- Causal directions remain identifiable under additional sufficient conditions even if the bow-free restriction is violated.
- Recovery accuracy exceeds that of additive-noise methods on data sets where variance depends on the cause.
- Hidden confounders do not destroy identifiability provided the graph remains bow-free.
Where Pith is reading between the lines
- Variance modulation may supply directional information in other non-additive causal models that are currently treated as unidentifiable.
- Domains with strong heteroscedasticity, such as financial returns or gene-expression levels, become natural targets for this style of causal search.
- The same modeling step could be tested on graphs that contain cycles or on noise families that combine location-scale with other parametric forms.
Load-bearing premise
The data must be generated exactly by a location-scale noise process rather than by some other noise structure.
What would settle it
A pair of distinct bow-free ADMGs that produce identical observational distributions under some location-scale noise model would falsify the identifiability claim.
Figures
read the original abstract
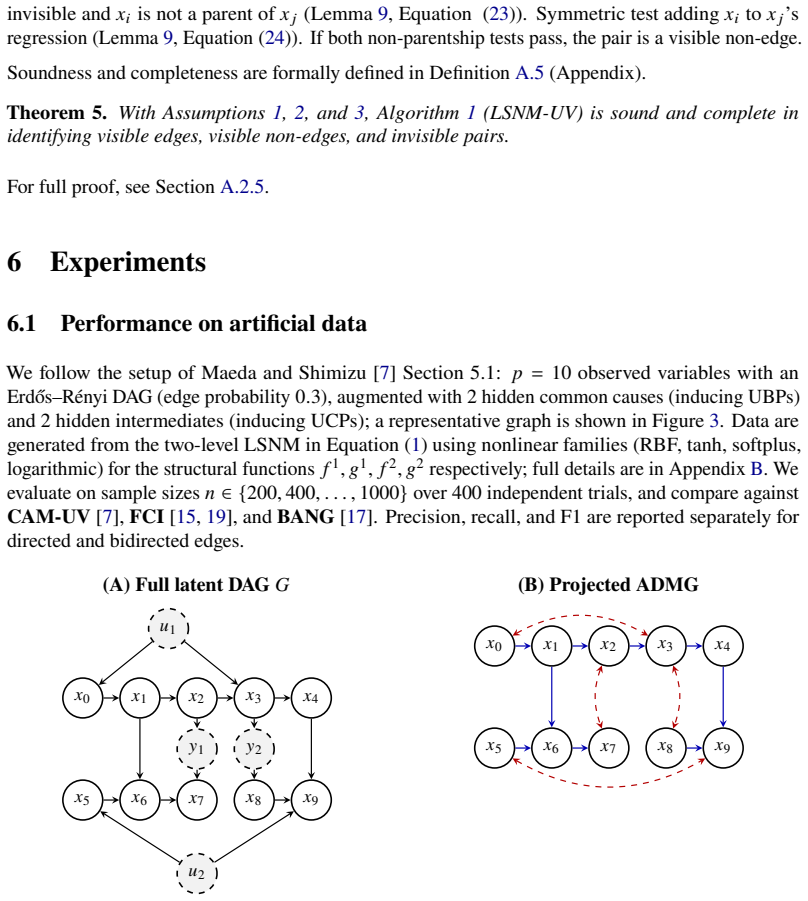
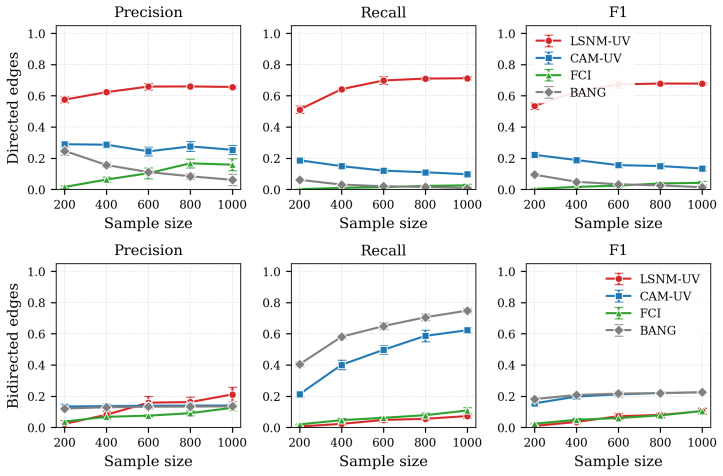
We study causal discovery from observational data when some variables are hidden and the data-generating process follows a location-scale noise model (LSNM). Existing methods that handle hidden confounders typically assume additive noise, but in practice, causes often modulate not just the mean but also the variance of their effects. We prove that acyclic directed mixed graphs (ADMGs) satisfying a bow-free condition are identifiable under LSNM with hidden variables, establishing the first identifiability result for causally insufficient models beyond noise additivity. We further provide sufficient conditions for identifying causal direction even when the bow-free assumption is violated. Our two-stage algorithm, LSNM-UV, is sound and complete, and experiments demonstrate improved performance over additive baselines on heteroscedastic data.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to prove that acyclic directed mixed graphs (ADMGs) satisfying a bow-free condition are identifiable under location-scale noise models (LSNM) with hidden variables. It establishes this as the first identifiability result for causally insufficient models beyond additive noise, provides sufficient conditions for identifying causal direction even when the bow-free assumption is violated, introduces the two-stage LSNM-UV algorithm claimed to be sound and complete, and reports experiments showing improved performance over additive baselines on heteroscedastic data.
Significance. If the identifiability theorem and soundness/completeness of LSNM-UV hold, the result would meaningfully extend causal discovery beyond additive noise assumptions to location-scale models that capture variance modulation, while accommodating hidden variables via ADMGs. This addresses a practical limitation of existing methods and could enable more realistic modeling of heteroscedastic causal effects.
minor comments (2)
- The abstract asserts a proof of identifiability and that the algorithm is sound and complete but supplies no derivation steps, key lemmas, or error analysis; the central claim therefore cannot be evaluated from the provided information.
- Experimental details (datasets, metrics, baselines, and quantitative results) are referenced but not described in the abstract, limiting assessment of the performance claims.
Simulated Author's Rebuttal
We thank the referee for their review and for recognizing the potential significance of extending causal discovery to location-scale noise models with hidden variables. The report notes an 'uncertain' recommendation but provides no specific major comments for us to address point by point. We remain available to provide additional clarifications or revisions if the editor or referee identifies particular concerns.
Circularity Check
No significant circularity detected
full rationale
The paper advances a theoretical identifiability theorem for bow-free ADMGs under the location-scale noise model with hidden variables. The derivation is presented as a direct proof from the stated graphical and distributional assumptions (LSNM rather than additive noise), without any reduction of the central claim to fitted parameters, self-referential definitions, or load-bearing self-citations whose validity depends on the present work. The bow-free condition and LSNM scope are explicitly declared as the enabling restrictions, and the result is framed as extending prior additive-noise results rather than re-deriving them by construction. This is the most common honest outcome for a pure identifiability paper whose assumptions are stated up front.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Observed data are generated by an acyclic directed mixed graph under a location-scale noise model.
- domain assumption The graph satisfies the bow-free condition.
Reference graph
Works this paper leans on
-
[1]
Causal reasoning in the presence of latent confounders via neural ADMG learning
Matthew Ashman, Chao Ma, Agrin Hilmkil, Joel Jennings, and Cheng Zhang. Causal reasoning in the presence of latent confounders via neural ADMG learning. InThe 11th International Conference on Learning Representations (ICLR), 2023. 10
2023
-
[2]
CAM: Causal additive models, high-dimensional order search and penalized regression.The Annals of Statistics, 42(6):2526–2556, 2014
Peter Bühlmann, Jonas Peters, and Jan Ernest. CAM: Causal additive models, high-dimensional order search and penalized regression.The Annals of Statistics, 42(6):2526–2556, 2014
2014
-
[3]
Hoyer, Shohei Shimizu, Antti J
Patrik O. Hoyer, Shohei Shimizu, Antti J. Kerminen, and Markus Palviainen. Causal discovery of linear acyclic models with arbitrary distributions. InProceedings of the 24th Conference on Uncertainty in Artificial Intelligence (UAI), pages 282–289, 2008
2008
-
[4]
Hoyer, Dominik Janzing, Joris M
Patrik O. Hoyer, Dominik Janzing, Joris M. Mooij, Jonas Peters, and Bernhard Schölkopf. Nonlinear causal discovery with additive noise models. InAdvances in Neural Information Processing Systems 21 (NeurIPS), pages 689–696, 2009
2009
-
[5]
Vogt, Bernhard Schölkopf, Peter Bühlmann, and Alexander Marx
Alexander Immer, Christoph Schultheiss, Julia E. Vogt, Bernhard Schölkopf, Peter Bühlmann, and Alexander Marx. On the identifiability and estimation of causal location-scale noise models. InProceedings of the 40th International Conference on Machine Learning (ICML), volume 202 ofPMLR, pages 14316–14332, 2023
2023
-
[6]
A skewness-based criterion for addressing heteroscedastic noise in causal discovery
Yingyu Lin, Yuxing Huang, Wenqin Liu, Haoran Deng, Ignavier Ng, Kun Zhang, Mingming Gong, Yian Ma, and Biwei Huang. A skewness-based criterion for addressing heteroscedastic noise in causal discovery. InThe 13th International Conference on Learning Representations (ICLR), 2025
2025
-
[7]
Causaladditivemodelswithunobservedvariables
TakashiNicholasMaedaandShoheiShimizu. Causaladditivemodelswithunobservedvariables. InProceedings of the 37th Conference on Uncertainty in Artificial Intelligence (UAI), volume 161 ofPMLR, pages 97–106, 2021
2021
-
[8]
Cambridge University Press, 2nd edition, 2009
Judea Pearl.Causality: Models, Reasoning, and Inference. Cambridge University Press, 2nd edition, 2009
2009
-
[9]
Mooij, Dominik Janzing, and Bernhard Schölkopf
Jonas Peters, Joris M. Mooij, Dominik Janzing, and Bernhard Schölkopf. Identifiability of causal graphs using functional models. InProceedings of the 27th Conference on Uncertainty in Artificial Intelligence (UAI), pages 589–598, 2011
2011
-
[10]
Mooij, Dominik Janzing, and Bernhard Schölkopf
Jonas Peters, Joris M. Mooij, Dominik Janzing, and Bernhard Schölkopf. Causal discovery with continuous additive noise models.Journal of Machine Learning Research, 15(58):2009–2053, 2014
2009
-
[11]
Causal additive models with unobserved causal paths and backdoor paths
Thong Pham, Takashi Nicholas Maeda, and Shohei Shimizu. Causal additive models with unobserved causal paths and backdoor paths. InThe 29th International Conference on Artificial Intelligence and Statistics, 2026
2026
-
[12]
Markov Properties for Acyclic Directed Mixed Graphs , volume=
Thomas Richardson. Markov properties for acyclic directed mixed graphs.Scandinavian Journal of Statistics, 30(1):145–157, 2003. doi: 10.1111/1467-9469.00323
-
[13]
AncestralgraphMarkovmodels.TheAnnalsofStatistics, 30(4):962–1030, 2002
ThomasRichardsonandPeterSpirtes. AncestralgraphMarkovmodels.TheAnnalsofStatistics, 30(4):962–1030, 2002
2002
-
[14]
Hoyer, Aapo Hyvärinen, and Antti Kerminen
Shohei Shimizu, Patrik O. Hoyer, Aapo Hyvärinen, and Antti Kerminen. A linear non-Gaussian acyclic model for causal discovery.Journal of Machine Learning Research, 7:2003–2030, 2006
2003
-
[15]
Glymour, and Richard Scheines.Causation, Prediction, and Search
Peter Spirtes, Clark N. Glymour, and Richard Scheines.Causation, Prediction, and Search. MIT Press, Cambridge, MA, 2nd edition, 2000
2000
-
[16]
Cause-effect inference in location-scale noise models: Maximum likelihood vs
Xiangyu Sun and Oliver Schulte. Cause-effect inference in location-scale noise models: Maximum likelihood vs. independence testing. InAdvances in Neural Information Processing Systems 36 (NeurIPS), 2023
2023
-
[17]
Samuel Wang and Mathias Drton
Y. Samuel Wang and Mathias Drton. Causal discovery with unobserved confounding and non-Gaussian data.Journal of Machine Learning Research, 24(271):1–61, 2023. 11
2023
-
[18]
Effective causal discovery under identifiable heteroscedastic noise model
Naiyu Yin, Tian Gao, Yue Yu, and Qiang Ji. Effective causal discovery under identifiable heteroscedastic noise model. InProceedings of the 38th AAAI Conference on Artificial Intelligence, volume 38, 2024
2024
-
[19]
On the completeness of orientation rules for causal discovery in the presence of latent confounders and selection bias.Artificial Intelligence, 172(16–17):1873–1896, 2008
Jiji Zhang. On the completeness of orientation rules for causal discovery in the presence of latent confounders and selection bias.Artificial Intelligence, 172(16–17):1873–1896, 2008
2008
-
[20]
visible edge,
Kun Zhang and Aapo Hyvärinen. On the identifiability of the post-nonlinear causal model. InProceedings of the 25th Conference on Uncertainty in Artificial Intelligence (UAI), pages 647–655, 2009. A Technical appendices and supplementary material A.1 Theoretical proofs Notation.In the main text, the regression functionℎ(𝑖, 𝑆) uses a single exclusion set𝑆 f...
2009
-
[21]
, 𝑚 , the pair (𝑥𝑖, 𝑥𝑘𝑞 ) is invisible (Definition A.3): ∀ℎ 1, ℎ2 ∈ H : ℎ1(𝑖,{𝑖}) ̸ ⊥ ⊥ℎ2(𝑘 𝑞,{𝑘 𝑞 })
For each 𝑞=1, . . . , 𝑚 , the pair (𝑥𝑖, 𝑥𝑘𝑞 ) is invisible (Definition A.3): ∀ℎ 1, ℎ2 ∈ H : ℎ1(𝑖,{𝑖}) ̸ ⊥ ⊥ℎ2(𝑘 𝑞,{𝑘 𝑞 }). Under Assumptions 1 and 2, suppose further that for each𝑞=1, . . . , 𝑚the following holds: ∀ℎ 1, ℎ2 ∈ H:ℎ 1(𝑖,{𝑖, 𝑘 𝑞 }) ̸ ⊥ ⊥ℎ 2 (𝑗,{𝑗, 𝑘 𝑞 }).(25) Then each𝑥𝑘𝑞 is an ancestor of𝑥𝑖. Proof. Fix any𝑞∈ {1, . . . , 𝑚} . We prove the cont...
-
[22]
Select a pair(𝑥 𝑎, 𝑥𝑏) of observed variables that have no direct edge between them in either direction
-
[23]
The node𝑢𝑘 is a root (no parents of its own)
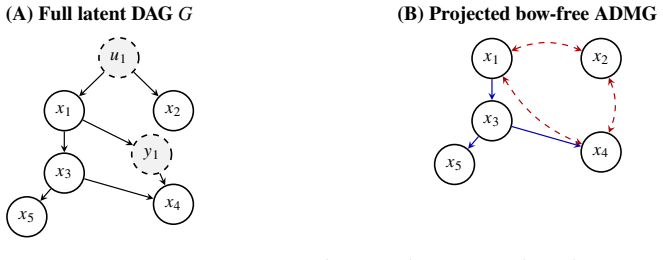
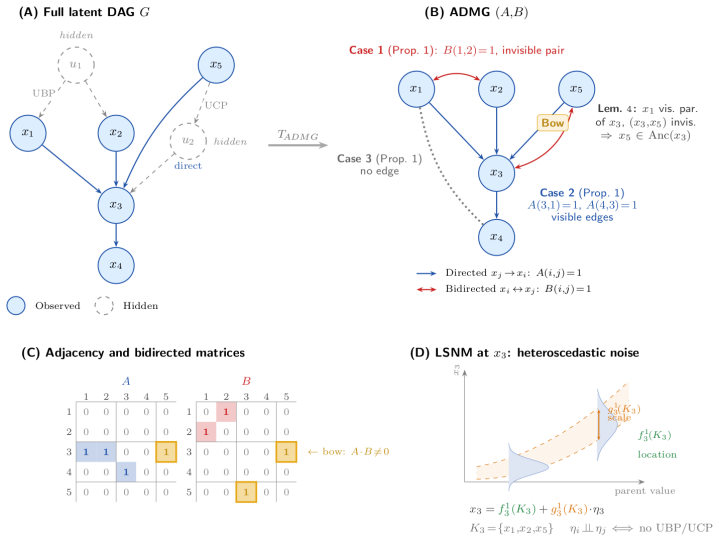
Add directed edges𝑢𝑘 →𝑥 𝑎 and𝑢 𝑘 →𝑥 𝑏. The node𝑢𝑘 is a root (no parents of its own). When 𝑢𝑘 ismarginalisedout,theprojectedADMGacquiresthebidirectededge 𝑥𝑎 ↔𝑥 𝑏,representing an Unobserved Backdoor Path (UBP). Because(𝑥 𝑎, 𝑥𝑏) was chosen to have no direct edge, the bow-free condition is satisfied for this pair. Hidden intermediates (UCPs).For each of the𝑛i...
-
[24]
2.Removethe direct edge𝑥 𝑗 →𝑥 𝑖
Select an existing direct observed edge𝑥𝑗 →𝑥 𝑖. 2.Removethe direct edge𝑥 𝑗 →𝑥 𝑖
-
[25]
When 𝑦𝑘 ismarginalisedout,theprojectedADMGacquiresthebidirectededge 𝑥 𝑗 ↔𝑥 𝑖,representing an Unobserved Causal Path (UCP)
Add𝑥 𝑗 →𝑦 𝑘 and𝑦 𝑘 →𝑥 𝑖. When 𝑦𝑘 ismarginalisedout,theprojectedADMGacquiresthebidirectededge 𝑥 𝑗 ↔𝑥 𝑖,representing an Unobserved Causal Path (UCP). Removing the direct edge ensures bow-freeness. Step 2: Data generation All variables are generated in topological order of the full latent DAG, so that every parent of𝑣 𝑖 has already been assigned values when𝑣...
-
[26]
• FCI[ 15, 19]
Output parsing identical to LSNM-UV. • FCI[ 15, 19]. From the causal-learn package (v0.1.4.5) with Fisher-𝑧 test at 𝛼=0.01 . We extract onlydefiniteedges (no circle marks): directed𝑥 𝑗 →𝑥 𝑖 when 𝐺[𝑗, 𝑖]=−1 and 𝐺[𝑖, 𝑗]=1; bidirected𝑥 𝑖 ↔𝑥 𝑗 when𝐺[𝑖, 𝑗]=𝐺[𝑗, 𝑖]=1. • BANG[17]. Sourcefrom https://github.com/ysamwang/ngBap,calledvia rpy2(v3.5.11, Rv4.3.1). Run...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.