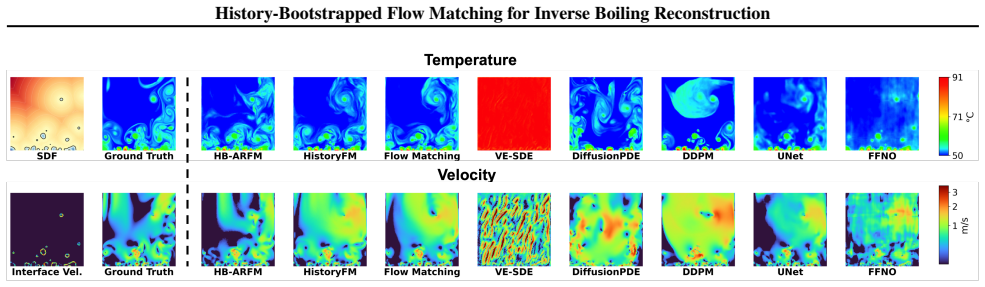
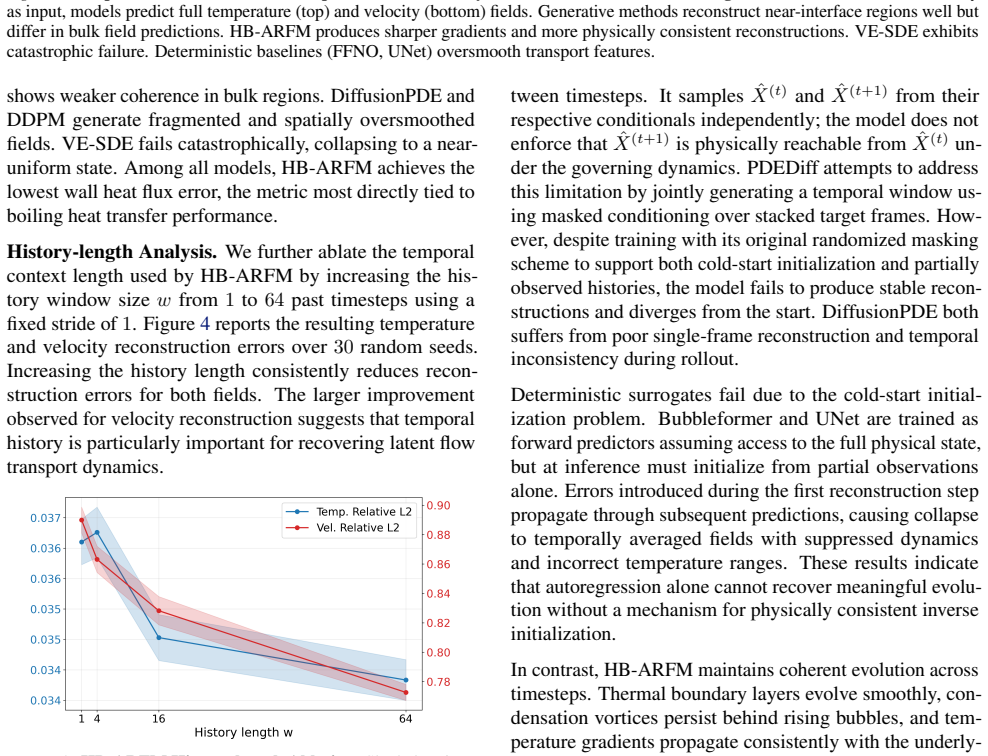
(HB-ARFM) History-Bootstrapped Flow Matching for Inverse Boiling Reconstruction
Pith reviewed 2026-06-28 22:52 UTC · model grok-4.3
The pith
History-bootstrapped autoregressive flow matching reconstructs valid boiling velocity and temperature fields from partial interface observations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
HB-ARFM produces physically and temporally valid reconstructions of full velocity and temperature fields from interface geometry and motion in boiling dynamics by first using conditional flow matching on observation history for bootstrapping and then applying the model autoregressively on new observations and past predictions, succeeding across two inverse tasks with different observation sparsity where other models fail.
What carries the argument
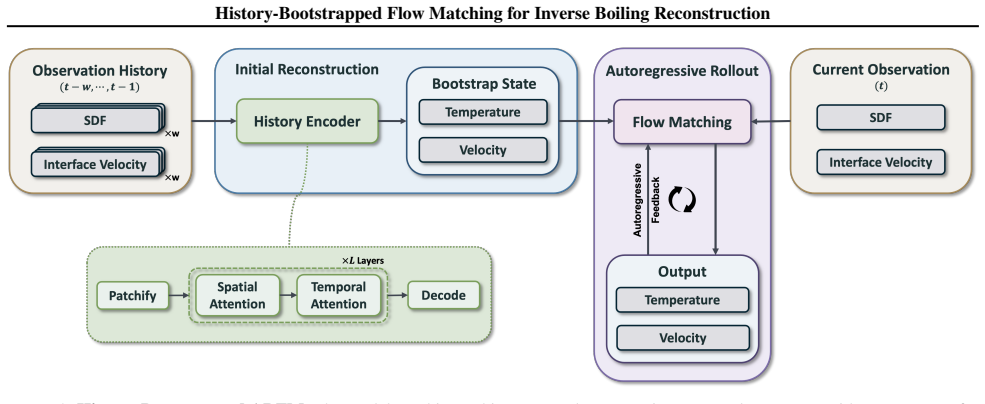
History-bootstrapped autoregressive flow matching (HB-ARFM), which conditions on observation history to bootstrap the initial reconstruction via conditional flow matching and then propagates forward autoregressively while conditioning on both new observations and prior predictions.
If this is right
- Recovers complete velocity and temperature fields from interface geometry and motion alone.
- Maintains physical and temporal validity across tasks that differ in observation sparsity.
- Avoids the invalid outputs produced by models lacking history bootstrapping or autoregressive conditioning.
- Resolves the ill-posed inverse problem created when partial observation operators make the posterior non-Markovian.
Where Pith is reading between the lines
- The same bootstrapping-plus-autoregression pattern may apply directly to other partial-observation inverse problems such as atmospheric state recovery from satellite imagery.
- History conditioning appears necessary whenever the observation operator itself introduces temporal dependencies that single-timestep models cannot capture.
- Longer test sequences would expose whether autoregressive propagation eventually diverges even when initial bootstrapping succeeds.
Load-bearing premise
Conditioning on observation history plus autoregressive use of past predictions is sufficient to resolve the non-Markovian posterior induced by partial observations without accumulating errors over time.
What would settle it
Running the method on a held-out sequence with known full ground-truth states and checking whether reconstructed velocity and temperature fields remain consistent with the boiling PDE dynamics and match ground truth over many timesteps beyond the training horizon.
Figures
read the original abstract
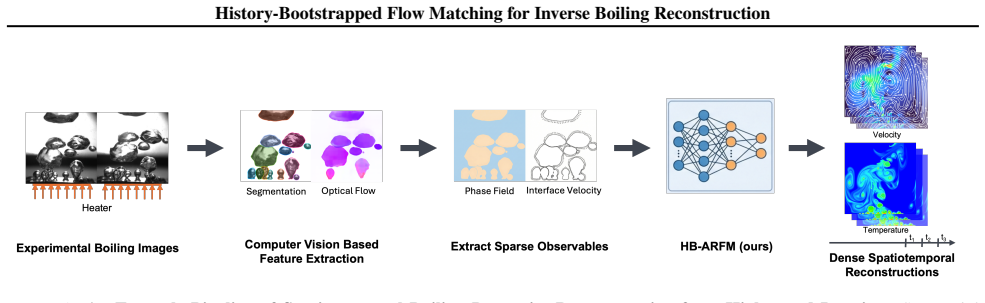
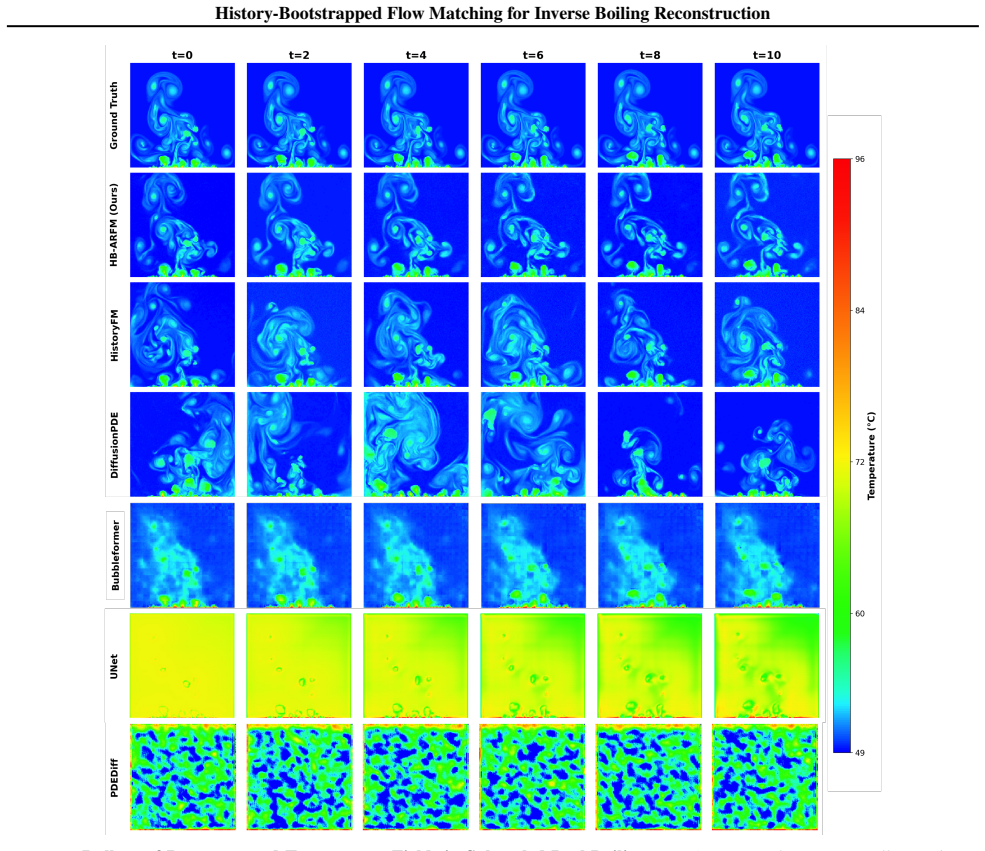
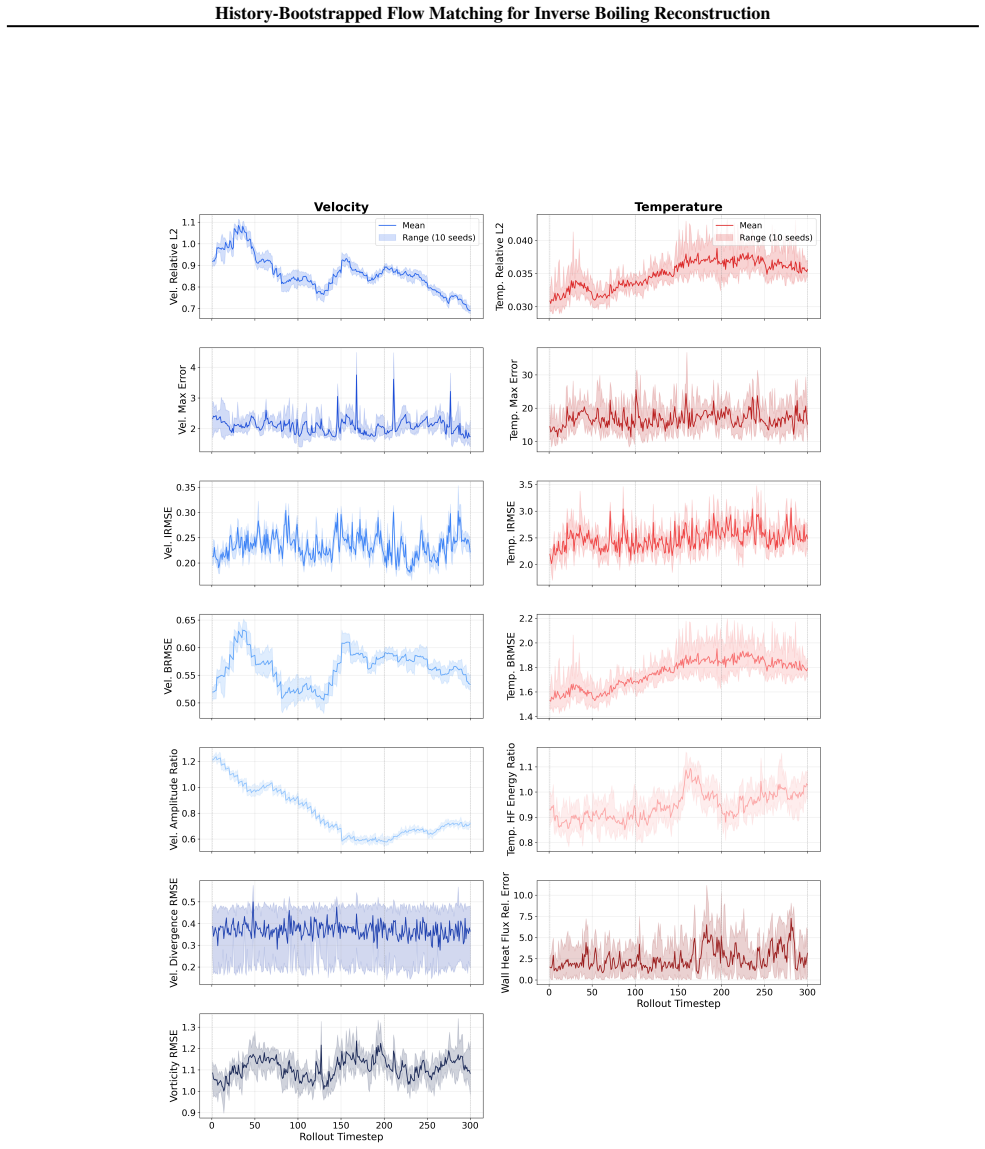
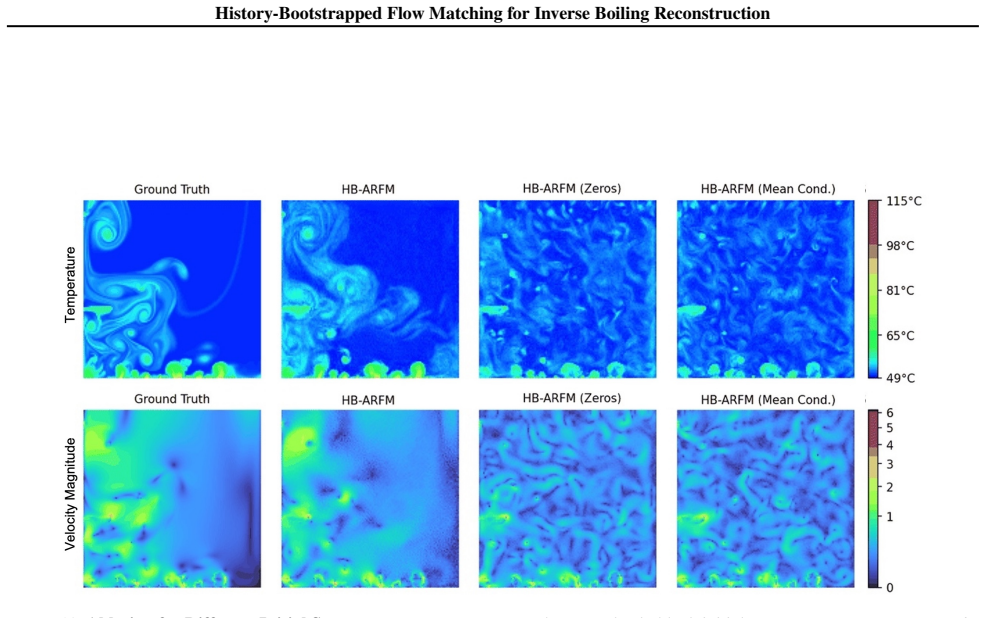
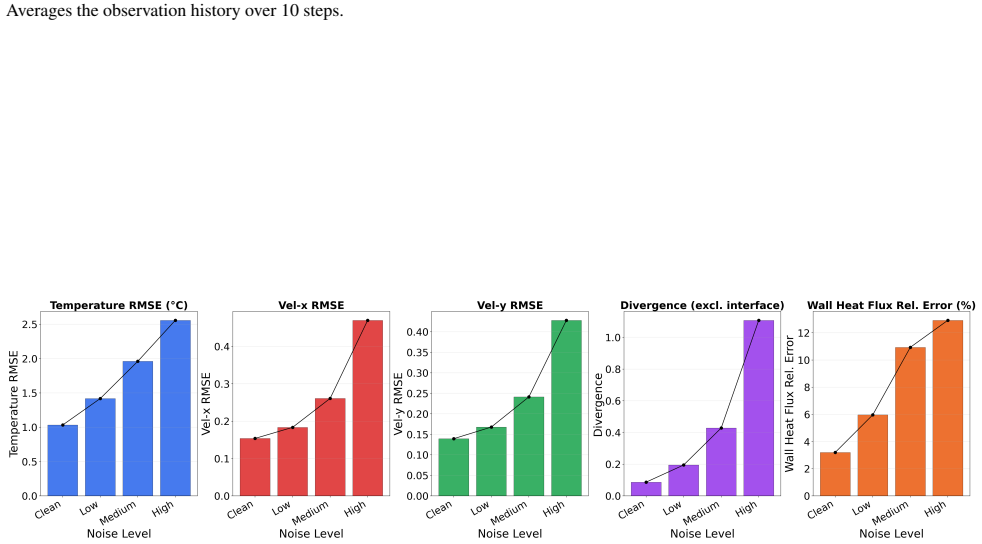
Reconstructing spatiotemporal fields from partial observations is fundamental to scientific inference, from inferring atmospheric states from satellite data to recovering fluid states from imaging. When observations are incomplete, the inverse problem is fundamentally ill-posed: even when the underlying PDE dynamics are Markovian in the full state, partial observation operators induce a non-Markovian posterior that cannot be resolved from a single timestep. We propose a history-bootstrapped autoregressive flow matching (HB-ARFM) for spatiotemporal inverse reconstruction under partial observability. Observation history bootstraps the initial reconstruction via conditional flow matching, reducing ambiguities. The same conditional transport model is then applied autoregressively, conditioning on both new observations and past predictions to propagate the reconstruction forward in time. We evaluate the method on boiling dynamics reconstruction, recovering full velocity and temperature fields from interface geometry and motion. Across two inverse tasks with varying observation sparsity, HB-ARFM produces physically and temporally valid reconstructions where other models fail.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes History-Bootstrapped Autoregressive Flow Matching (HB-ARFM) to reconstruct spatiotemporal fields (velocity and temperature) from partial observations in boiling dynamics. Observation history is used to bootstrap an initial reconstruction via conditional flow matching; the same model is then applied autoregressively, conditioning on new observations plus prior predictions, to address the non-Markovian posterior induced by incomplete observations. The paper claims that this produces physically and temporally valid reconstructions on two inverse tasks with varying sparsity, where other models fail.
Significance. If the central claims hold with supporting quantitative evidence, the work could contribute a practical approach to ill-posed inverse problems in fluid dynamics by combining history conditioning with autoregressive flow matching to maintain temporal consistency under partial observability.
major comments (2)
- [Abstract] Abstract: the claim that autoregressive application of the conditional transport model 'resolves the non-Markovian posterior' and yields 'physically and temporally valid reconstructions' is load-bearing, yet the description provides no indication of mitigation for exposure bias (conditioning on model predictions rather than ground truth at test time), such as scheduled sampling, consistency regularization, or bounded-error analysis; without this, error compounding over timesteps remains an unaddressed risk to the temporal-validity claim.
- [Abstract] Abstract: the assertion of success 'across two inverse tasks with varying observation sparsity' and that 'HB-ARFM produces ... reconstructions where other models fail' is unsupported by any equations, dataset details, baseline methods, quantitative metrics, or ablation results, preventing verification that the architecture actually delivers the stated performance.
minor comments (1)
- [Title] The parenthetical '(HB-ARFM)' in the title is redundant with the expansion given in the first sentence of the abstract.
Simulated Author's Rebuttal
We thank the referee for their detailed feedback on our manuscript. We address the major comments point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that autoregressive application of the conditional transport model 'resolves the non-Markovian posterior' and yields 'physically and temporally valid reconstructions' is load-bearing, yet the description provides no indication of mitigation for exposure bias (conditioning on model predictions rather than ground truth at test time), such as scheduled sampling, consistency regularization, or bounded-error analysis; without this, error compounding over timesteps remains an unaddressed risk to the temporal-validity claim.
Authors: We acknowledge the referee's concern regarding exposure bias in the autoregressive rollout. The manuscript describes conditioning on both new observations and prior predictions to propagate reconstructions, which is intended to leverage the history bootstrapping to mitigate ambiguities from partial observations. However, the abstract does not explicitly discuss mitigation techniques such as scheduled sampling or error bounds. We will revise the manuscript to add a dedicated discussion of this issue, including any empirical checks on error accumulation performed during evaluation. revision: yes
-
Referee: [Abstract] Abstract: the assertion of success 'across two inverse tasks with varying observation sparsity' and that 'HB-ARFM produces ... reconstructions where other models fail' is unsupported by any equations, dataset details, baseline methods, quantitative metrics, or ablation results, preventing verification that the architecture actually delivers the stated performance.
Authors: The abstract is a concise summary of the work. The full manuscript provides the model equations for the conditional flow matching, details on the two boiling dynamics inverse tasks and observation sparsity levels, descriptions of baseline methods, quantitative metrics (e.g., field reconstruction errors), and ablation studies demonstrating where HB-ARFM succeeds while others fail. These elements are presented in the methods, experiments, and results sections to support the claims. revision: no
Circularity Check
No circularity: method is a standard conditional flow-matching architecture with autoregressive rollout
full rationale
The provided abstract and description define HB-ARFM as a conditional flow-matching model trained on observation histories, then applied autoregressively. No equations, fitted parameters, or self-citations are shown that reduce any claimed result to its inputs by construction. The central mechanism (history bootstrapping + autoregressive conditioning) is an architectural choice whose validity is evaluated externally on boiling reconstruction tasks; it does not rename or tautologically reproduce any input quantity. This matches the default expectation of a non-circular proposal.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Partial observation operators induce a non-Markovian posterior that cannot be resolved from a single timestep even when full-state PDE dynamics are Markovian.
Reference graph
Works this paper leans on
-
[1]
Bastek, J.-H., Sun, W., and Kochmann, D
URL https://openreview.net/forum? id=tAf1KI3d4X. Bastek, J.-H., Sun, W., and Kochmann, D. Physics-informed diffusion models. InThe Thirteenth International Confer- ence on Learning Representations, 2025. URL https: //openreview.net/forum?id=tpYeermigp. Bertsch, S. S., Groll, E. A., and Garimella, S. V . A compos- ite heat transfer correlation for saturate...
-
[2]
doi: https://doi.org/10.1016/j.softx.2022.101168. URL https://www.sciencedirect.com/ science/article/pii/S2352711022001030. El-Gazzar, A. and van Gerven, M. Probabilistic forecast- ing via autoregressive flow matching.arXiv preprint arXiv:2503.10375, 2025. Fu, Q., Suh, Y ., Zhang, X., Chang, S., and Won, Y . Bub- ble2heat: Optical to thermal inference in ...
-
[3]
Konishi, C., Lee, H., Mudawar, I., Hasan, M
URL https://www.sciencedirect.com/ science/article/pii/S001793101400934X. Konishi, C., Lee, H., Mudawar, I., Hasan, M. M., Nahra, H. K., Hall, N. R., Wagner, J. D., May, R. L., and Mackey, J. R. Flow boiling in microgravity: Part 2 – critical heat flux interfacial behavior, experimental data, and model.International Journal of Heat and Mass Transfer, 81:7...
-
[4]
Li, Z., Liu-Schiaffini, M., Kovachki, N., Azizzadenesheli, K., Liu, B., Bhattacharya, K., Stuart, A., and Anandku- mar, A
URL https://www.sciencedirect.com/ science/article/pii/S0017931014009375. Li, Z., Liu-Schiaffini, M., Kovachki, N., Azizzadenesheli, K., Liu, B., Bhattacharya, K., Stuart, A., and Anandku- mar, A. Learning chaotic dynamics in dissipative systems. Advances in Neural Information Processing Systems, 35: 16768–16781, 2022. Li, Z., Han, W., Zhang, Y ., Fu, Q.,...
2022
-
[5]
URL https://api.semanticscholar. org/CorpusID:122454757. Ni, S., Pan, C., Hibiki, T., and Zhao, J. Applications of nucleate boiling in renewable energy and thermal man- agement and recent advances in modeling——a review. Energy, 289:129962, 2024. 11 History-Bootstrapped Flow Matching for Inverse Boiling Reconstruction Phillips, B. A.Experimental investigat...
Pith/arXiv arXiv 2024
-
[6]
Song, Y ., Shen, L., Xing, L., and Ermon, S
URL https://openreview.net/forum? id=PxTIG12RRHS. Song, Y ., Shen, L., Xing, L., and Ermon, S. Solving inverse problems in medical imaging with score-based genera- tive models. InInternational Conference on Learning Representations, 2022. URL https://openreview. net/forum?id=vaRCHVj0uGI. Suh, Y ., Chandramowlishwaran, A., and Won, Y . Recent progress of a...
2022
-
[7]
Wang, S., Dou, Z., Shan, S., Liu, T.-R., and Lu, L
URL https://openreview.net/forum? id=tmIiMPl4IPa. Wang, S., Dou, Z., Shan, S., Liu, T.-R., and Lu, L. Fundiff: Diffusion models over function spaces for physics-informed generative modeling.arXiv preprint arXiv:2506.07902, 2025a. Wang, S., Wu, Z., van Dijk, D., and Lu, L. Geofunflow: Geometric function flow matching for inverse opera- tor learning over co...
-
[8]
org/CorpusID:121594079
URL https://api.semanticscholar. org/CorpusID:121594079. 12 History-Bootstrapped Flow Matching for Inverse Boiling Reconstruction A. Software and Data Code, trained models, and evaluation scripts are available at:https://github.com/therml-ai/HB-ARFM. B. Notation Table 2.Notation summary for generative models Symbol Description Xt Full physical state at ti...
-
[9]
During training, a clean sample x0 is progressively corrupted by noise ϵ according to a fixed schedule, producing noisy versions xt at different timesteps
Denoising Diffusion Probabilistic Models (DDPM)DDPM (Ho et al., 2020) defines a forward noising process and learns to reverse it by predicting Gaussian noise at each timestep. During training, a clean sample x0 is progressively corrupted by noise ϵ according to a fixed schedule, producing noisy versions xt at different timesteps. A neural network is train...
2020
-
[10]
Score-based models learn the score function ∇x logp t(x), the gradient of the log-density of the noisy data at each noise level
Variance Exploding Score-Based Models (VE-SDE).VE-SDE is a score-based generative baseline (Song et al., 2021). Score-based models learn the score function ∇x logp t(x), the gradient of the log-density of the noisy data at each noise level. Training perturbs clean data with a forward stochastic differential equation (SDE) and matches the network output to...
2021
-
[11]
Flow Matching.Flow Matching (Lipman et al., 2023) is a framework for learning continuous-time generative models that transport samples from a simple base distribution to a target distribution by integrating a learned velocity field. Given conditioning information c, flow matching learns a time-dependent velocity fieldvθ(x,c, s) defining the ordinary diffe...
2023
-
[12]
It uses spatial and temporal attention to capture long-range spatial correlations and temporal dependencies arising from phase-change dynamics
Bubbleformer.Bubbleformer (Hassan et al., 2025) is a spatiotemporal transformer-based neural surrogate for multiphase boiling simulations that can act as a robust forecasting model for a boiling system. It uses spatial and temporal attention to capture long-range spatial correlations and temporal dependencies arising from phase-change dynamics. The model ...
2025
-
[13]
FFNO.FFNO (Tran et al., 2023) is a 2D Factorized Fourier Neural Operator: it applies learnable spectral convolutions in the Fourier domain along each spatial dimension separately, retaining a fixed number of low-frequency modes per dimension, then passes the result through small feedforward networks. Our implementation uses shared Fourier weights and shar...
2023
-
[14]
DiffusionPDE.DiffusionPDE (Huang et al., 2024) is a conditional diffusion baseline for PDE field prediction under partial observation. It uses the EDM (Karras et al., 2022) framework: a denoising network is trained to predict the clean target given noisy target and conditioning, with input/output preconditioning (scale and skip terms depending on noise le...
2024
-
[15]
UNet.UNet (Ronneberger et al., 2015) is a standard convolutional encoder–decoder baseline. The 2D UNet uses a four-level encoder with repeated blocks of two 3×3 convolutions, batch normalization, and GELU activation, downsampling via max pooling; a bottleneck at the deepest level; and a symmetric decoder with transposed convolutions for upsampling and ski...
2015
-
[16]
PDEDiff.PDEDiff (Shysheya et al., 2024) is a conditional diffusion model that generates a full temporal window of w frames jointly rather than predicting one frame at a time. The window is flattened along the channel axis,X∈R w·Cout×H×W , and the model is trained with an amortized mask-based conditioning scheme: the input to the score network is the conca...
2024
-
[17]
Given a window of past conditioning frames {(SDFt−w+1,u Γ t−w+1),
HistoryFM.History-window Flow Matching is a history-conditioned extension of OT-CFM (described above in §3) that augments the per-frame conditioning with a sliding window of w past observable frames, providing the model with explicit temporal context while remaining non-autoregressive. Given a window of past conditioning frames {(SDFt−w+1,u Γ t−w+1), . . ...
arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.