PairWise Image Finder: An Open-source Tool for Finding Visually Aligned Street-Level Image Pairs for Urban Perception Studies
Pith reviewed 2026-06-27 18:40 UTC · model grok-4.3
The pith
PairWise quantifies visual alignment of Street View image pairs across time with feature matching and semantic masks to support longitudinal urban studies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The PairWise image finder integrates feature detection and matching supported by semantic segmentation masks to quantify the visual alignment of two images of varying time periods. The tool outputs the share of matched key features, the matched feature distance and coverage, and the alignment of semantic masks, which enables the user to filter image pairs depending on the alignment quality and use case. The visually aligned pairs derived from the tool can be used to accurately study explicit longitudinal change and help reduce manual effort for perception studies.
What carries the argument
The combination of key feature matching metrics (share, distance, coverage) together with semantic mask alignment as a proxy for visual alignment quality between image pairs.
If this is right
- Filtered pairs enable accurate study of explicit longitudinal urban change.
- Manual effort in selecting image pairs for perception studies is reduced.
- Perspective must be accounted for when quantifying changes using aligned pairs.
- The method supplies a scalable open tool for researchers working on urban analysis and related applications.
Where Pith is reading between the lines
- The same alignment metrics could be tested on non-street-level imagery such as satellite or indoor scenes to check generality.
- Automated pipelines might combine the tool's scores with downstream models that score perceptual attributes on the filtered pairs.
- Thresholds on the output metrics could be tuned per city or time span to improve precision for specific research questions.
Load-bearing premise
The share of matched key features, matched feature distance and coverage, and semantic mask alignment together provide a sufficient and generalizable proxy for visual alignment quality across different cities, time gaps, and use cases.
What would settle it
A test set of image pairs from a new city or larger time gap where human raters consistently disagree with the tool's alignment scores on whether pairs are suitable for longitudinal perception analysis.
Figures
read the original abstract
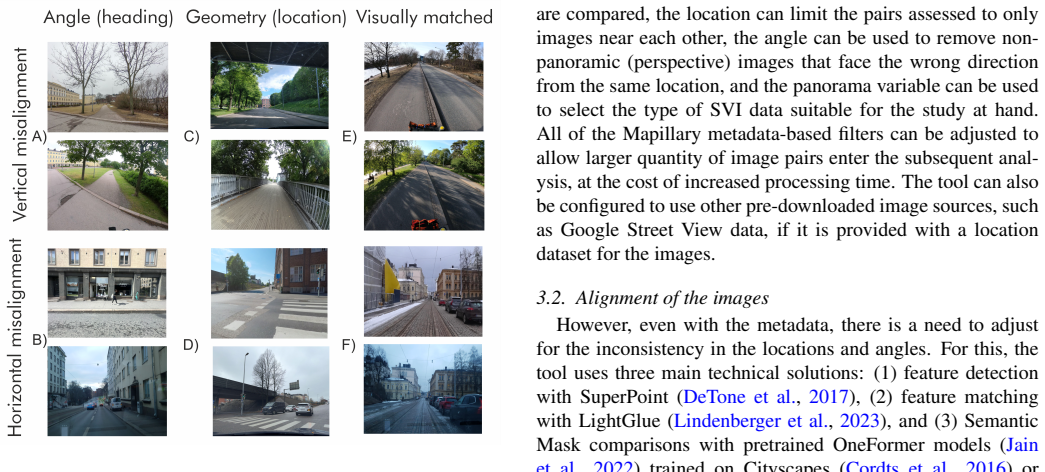
Change detection and scene recognition techniques have been widely applied to Street View Imagery (SVI) to understand changes in scenes across the years. However, metadata alone is often insufficient to reliably find visually aligned image pairs. This study introduces the PairWise image finder, a tool that integrates feature detection and matching, supported by semantic segmentation masks to quantify the visual alignment of two images of varying time periods. The tool outputs the share of matched key features, the matched feature distance and coverage, and the alignment of semantic masks, which enables the user to filter image pairs depending on the alignment quality and use case. The visually aligned pairs derived from the tool can be used to accurately study explicit longitudinal change and help reduce manual effort for perception studies. The usability of the tool is demonstrated through a comparison of longitudinal changes, highlighting the importance of perspective when quantifying changes. The proposed method provides a scalable and open tool for researchers and stakeholders to find high-quality image pairs for urban analysis, perception and related applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces PairWise, an open-source tool for identifying visually aligned pairs of street-level images from different time periods. It combines feature detection/matching with semantic segmentation masks to compute alignment metrics (matched key feature share, matched feature distance and coverage, semantic mask alignment), allowing users to filter pairs by quality. The tool is demonstrated on longitudinal change comparisons, emphasizing perspective effects, and is positioned as a scalable aid for urban perception studies to reduce manual effort.
Significance. If the alignment metrics are shown to be reliable proxies, the open-source tool could reduce manual effort in selecting SVI pairs for longitudinal urban studies and provide a reusable pipeline integrating standard CV components. The demonstration's attention to perspective effects is a constructive detail.
major comments (2)
- [Abstract] Abstract: the claim that 'the visually aligned pairs derived from the tool can be used to accurately study explicit longitudinal change' is unsupported by any quantitative validation (e.g., correlation of the metrics with human alignment ratings, precision@K on ground-truth pairs, or ablation across cities/time gaps).
- [Demonstration section] Demonstration section: the reported comparison of longitudinal changes does not include any test establishing that the combination of matched-keypoint share, feature distance/coverage, and semantic-mask alignment functions as a sufficient proxy for visual alignment quality, leaving the central usability claim untested.
minor comments (2)
- [Abstract] Abstract: the listed outputs appear to be three quantities, yet the skeptic note refers to 'four metrics'; clarify the exact set of outputs and their definitions.
- [Methods / Code availability] Ensure the open-source repository link, installation instructions, and example usage scripts are included with version pins for all dependencies to support reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We agree that the current version overstates the tool's validated utility for accurate longitudinal studies and will revise the abstract and demonstration section to align claims with the presented evidence.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'the visually aligned pairs derived from the tool can be used to accurately study explicit longitudinal change' is unsupported by any quantitative validation (e.g., correlation of the metrics with human alignment ratings, precision@K on ground-truth pairs, or ablation across cities/time gaps).
Authors: We agree that this claim lacks quantitative support in the manuscript. The tool provides alignment metrics derived from standard feature matching and semantic segmentation, but no correlation analysis, precision evaluation, or cross-city ablation is included. We will revise the abstract to remove 'accurately' and rephrase the claim to indicate that the tool outputs metrics enabling users to filter pairs for longitudinal studies, without asserting validated accuracy. revision: yes
-
Referee: [Demonstration section] Demonstration section: the reported comparison of longitudinal changes does not include any test establishing that the combination of matched-keypoint share, feature distance/coverage, and semantic-mask alignment functions as a sufficient proxy for visual alignment quality, leaving the central usability claim untested.
Authors: This assessment is correct. The demonstration illustrates application to change detection while noting perspective effects, but provides no empirical test (such as human ratings or ground-truth comparison) that the combined metrics serve as a reliable proxy. We will revise the demonstration section to explicitly state the metrics' role as user-selectable filters rather than proven proxies, and qualify the usability claims accordingly. If space permits, we will add a brief note on potential validation approaches for future work. revision: yes
Circularity Check
No circularity: tool pipeline with no derivations or self-referential predictions
full rationale
The manuscript describes an open-source software tool that combines standard feature matching and semantic segmentation to output alignment metrics for users to filter pairs. No equations, fitted parameters, or predictions are derived from the tool's own outputs; the central claim is simply that the resulting pairs can support perception studies, supported by example demonstrations rather than any closed-loop validation or self-citation chain. The absence of mathematical derivation or statistical prediction steps means no opportunity for the listed circularity patterns exists.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Street-view change detection with deconvolutional networks , volume =. Autonomous Robots , author =. 2018 , pages =. doi:10.1007/s10514-018-9734-5 , language =
-
[2]
SuperPoint: Self-Supervised Interest Point Detection and Description
DeTone, Daniel and Malisiewicz, Tomasz and Rabinovich, Andrew , year =. doi:10.48550/ARXIV.1712.07629 , abstract =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1712.07629
-
[3]
IEEE Transactions on Robotics , author =
Visual. IEEE Transactions on Robotics , author =. 2016 , pages =. doi:10.1109/TRO.2015.2496823 , number =
-
[4]
Cho, Kyusik and Woo, Suhan and Seong, Hongje and Kim, Euntai , year =. Environmental. doi:10.48550/ARXIV.2506.11481 , abstract =
-
[5]
Sakurada, Ken and Okatani, Takayuki , year =. Change. Procedings of the. doi:10.5244/C.29.61 , language =
-
[6]
Proceedings of the National Academy of Sciences , volume =
Computer Vision Uncovers Predictors of Physical Urban Change , author =. Proceedings of the National Academy of Sciences , volume =. doi:10.1073/pnas.1619003114 , urldate =
-
[7]
Lowe, D.G. , year =. Object recognition from local scale-invariant features , isbn =. Proceedings of the. doi:10.1109/ICCV.1999.790410 , urldate =
-
[8]
doi:10.48550/ARXIV.2306.13643 , abstract =
Lindenberger, Philipp and Sarlin, Paul-Edouard and Pollefeys, Marc , year =. doi:10.48550/ARXIV.2306.13643 , abstract =
-
[9]
Cordts, Marius and Omran, Mohamed and Ramos, Sebastian and Rehfeld, Timo and Enzweiler, Markus and Benenson, Rodrigo and Franke, Uwe and Roth, Stefan and Schiele, Bernt , month = jun, year =. The. 2016. doi:10.1109/CVPR.2016.350 , urldate =
-
[10]
Zhou, Bolei and Zhao, Hang and Puig, Xavier and Fidler, Sanja and Barriuso, Adela and Torralba, Antonio , month = jul, year =. Scene. 2017. doi:10.1109/CVPR.2017.544 , urldate =
-
[11]
2026 , note =
Mapillary , url =. 2026 , note =
2026
-
[12]
doi:10.48550/ARXIV.2409.15255 , abstract =
Kannan, Shyam Sundar and Min, Byung-Cheol , year =. doi:10.48550/ARXIV.2409.15255 , abstract =
-
[13]
Landscape and Urban Planning , author =
Exploring. Landscape and Urban Planning , author =. 2026 , keywords =. doi:10.1016/j.landurbplan.2026.105686 , language =
-
[14]
Examining state-led gentrification using street view imagery:. Cities , author =. 2026 , keywords =. doi:10.1016/j.cities.2026.107113 , language =
-
[15]
doi:10.48550/ARXIV.2401.01107 , abstract =
Huang, Tianyuan and Wu, Zejia and Wu, Jiajun and Hwang, Jackelyn and Rajagopal, Ram , year =. doi:10.48550/ARXIV.2401.01107 , abstract =
-
[16]
and Rajagopal, Ram and Hwang, Jackelyn , month = dec, year =
Huang, Tianyuan and Dai, Timothy and Wang, Zhecheng and Yoon, Hesu and Sheng, Hao and Ng, Andrew Y. and Rajagopal, Ram and Hwang, Jackelyn , month = dec, year =. Detecting. 2022. doi:10.1109/BigData55660.2022.10020341 , urldate =
-
[17]
Street View Imagery in Urban Analytics and
Biljecki, Filip and Ito, Koichi , year = 2021, month = nov, journal =. Street View Imagery in Urban Analytics and. doi:10.1016/j.landurbplan.2021.104217 , urldate =
-
[18]
The AI community building the future
Hugging. The AI community building the future. , urldate =
-
[19]
Sustainable Cities and Society , author =
Accessing. Sustainable Cities and Society , author =. 2024 , note =. doi:10.1016/j.scs.2024.105262 , language =
-
[20]
doi:10.48550/ARXIV.2211.06220 , abstract =
Jain, Jitesh and Li, Jiachen and Chiu, MangTik and Hassani, Ali and Orlov, Nikita and Shi, Humphrey , year =. doi:10.48550/ARXIV.2211.06220 , abstract =
-
[21]
perspective images for assessing place perception , volume =
Beyond the frame: evaluating panoramic vs. perspective images for assessing place perception , volume =. International Journal of Geographical Information Science , author =. 2025 , pages =. doi:10.1080/13658816.2025.2483857 , language =
-
[22]
A review of multimodal image matching:. Information Fusion , author =. 2021 , pages =. doi:10.1016/j.inffus.2021.02.012 , language =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.