PanoVine: Whole-Body Visuomotor Control for Soft Growing Vine Robot
Pith reviewed 2026-06-26 08:32 UTC · model grok-4.3
The pith
An end-to-end visuomotor policy trained from human demonstrations on whole-body camera feeds enables autonomous control of a soft vine robot in complex environments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
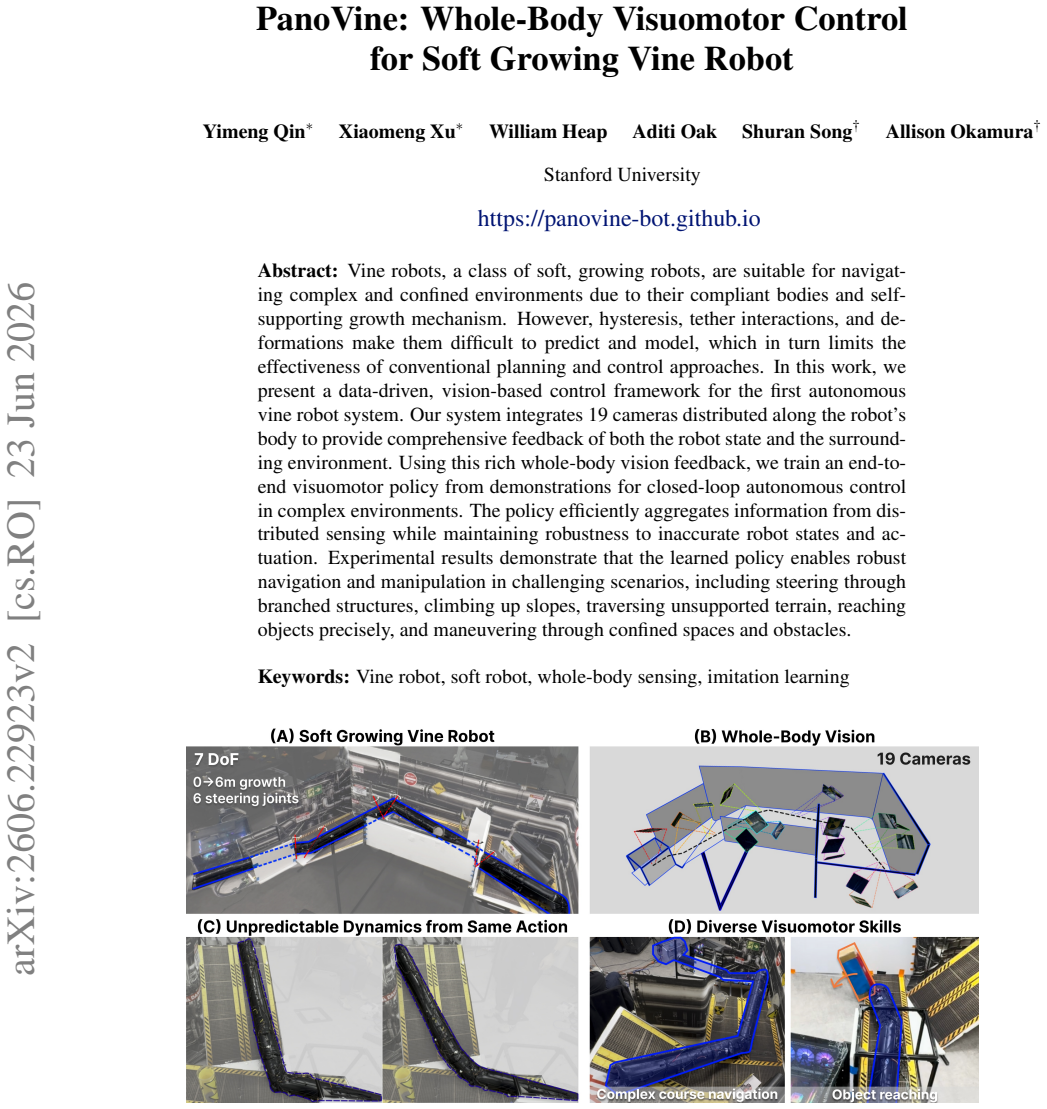
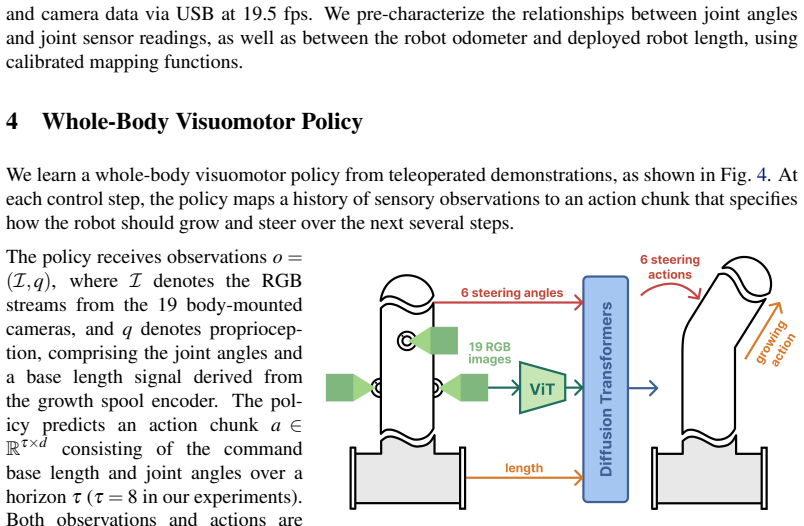
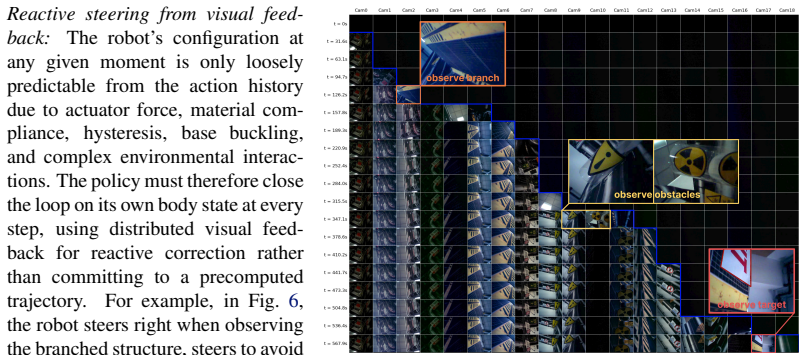
We present a data-driven, vision-based control framework for the first autonomous vine robot system. Our system integrates 19 cameras distributed along the robot's body to provide comprehensive feedback of both the robot state and the surrounding environment. Using this rich whole-body vision feedback, we train an end-to-end visuomotor policy from demonstrations for closed-loop autonomous control in complex environments. The policy efficiently aggregates information from distributed sensing while maintaining robustness to inaccurate robot states and actuation.
What carries the argument
The end-to-end visuomotor policy trained on images from 19 distributed cameras that maps visual observations directly to control actions.
If this is right
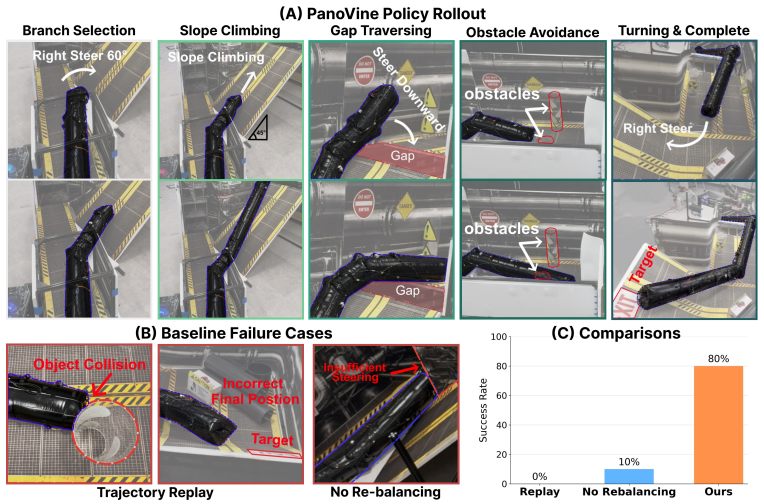
- The policy enables steering through branched structures without explicit kinematic models.
- It supports climbing slopes and traversing unsupported terrain.
- It allows precise reaching of objects and maneuvering through confined spaces and obstacles.
- The policy remains effective despite inaccurate estimates of robot state or actuation delays.
Where Pith is reading between the lines
- The same distributed-camera approach could be tested on other soft continuum robots that lack reliable forward models.
- A smaller camera subset focused on growth tip and contact points might retain performance while lowering hardware cost.
- Adding online adaptation to the policy could address gradual changes in tether friction over long growth distances.
Load-bearing premise
The set of human demonstrations covers the range of states and disturbances the robot will encounter, including unmodeled effects such as hysteresis and tether interactions.
What would settle it
Running the trained policy on a branched structure or slope configuration whose visual appearance and dynamics differ substantially from the demonstration set and observing repeated failure to reach the goal would falsify the robustness claim.
Figures
read the original abstract
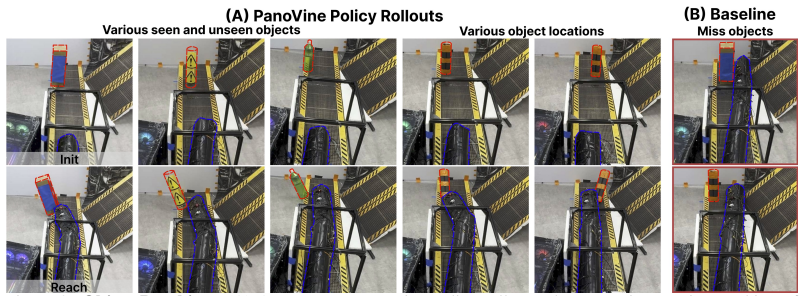
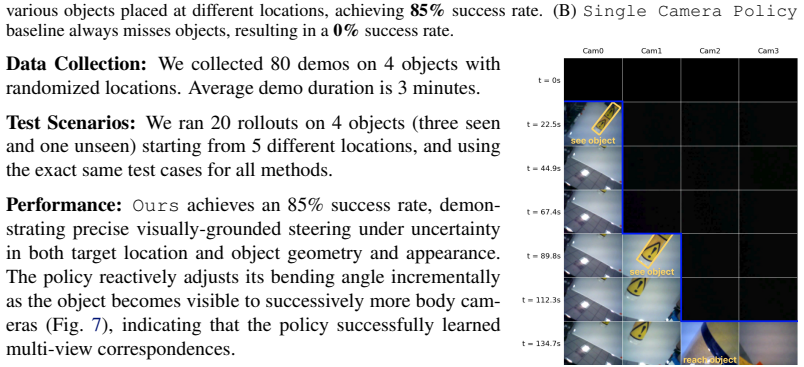
Vine robots, a class of soft, growing robots, are suitable for navigating complex and confined environments due to their compliant bodies and self-supporting growth mechanism. However, hysteresis, tether interactions, and deformations make them difficult to predict and model, which in turn limits the effectiveness of conventional planning and control approaches. In this work, we present a data-driven, vision-based control framework for the first autonomous vine robot system. Our system integrates 19 cameras distributed along the robot's body to provide comprehensive feedback of both the robot state and the surrounding environment. Using this rich whole-body vision feedback, we train an end-to-end visuomotor policy from demonstrations for closed-loop autonomous control in complex environments. The policy efficiently aggregates information from distributed sensing while maintaining robustness to inaccurate robot states and actuation. Experimental results demonstrate that the learned policy enables robust navigation and manipulation in challenging scenarios, including steering through branched structures, climbing up slopes, traversing unsupported terrain, reaching objects precisely, and maneuvering through confined spaces and obstacles. Project website https://panovine-bot.github.io
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents PanoVine, the first autonomous vine robot system, which integrates 19 cameras distributed along the robot body to supply whole-body visual feedback of state and environment. An end-to-end visuomotor policy is trained via imitation learning from human demonstrations and deployed for closed-loop control. The central claim is that this policy enables robust autonomous navigation and manipulation in challenging scenarios including steering through branched structures, climbing slopes, traversing unsupported terrain, precise reaching, and maneuvering in confined spaces with obstacles, thereby overcoming modeling difficulties such as hysteresis and tether interactions.
Significance. If the experimental claims hold under quantitative scrutiny, the work would be significant as the first demonstration of reliable data-driven whole-body control for growing vine robots. The multi-camera sensing and end-to-end policy approach directly addresses the core modeling challenges of soft growing robots and could serve as a template for other continuum and soft robots operating in unstructured environments where analytic models are intractable.
major comments (2)
- [Abstract and experimental results section] Abstract and experimental results section: the manuscript repeatedly asserts that the learned policy enables 'robust navigation and manipulation' and 'experimental robustness,' yet supplies no quantitative metrics (success rates, path error, completion time), baseline comparisons, failure rates, or statistical analysis across trials. This absence is load-bearing for the central empirical claim.
- [Training and evaluation pipeline (likely §4)] Training and evaluation pipeline (likely §4): the paper relies on the assumption that the collected human demonstrations sufficiently cover the state and disturbance distribution encountered at deployment, but provides no analysis of state coverage, out-of-distribution detection, or recovery behavior under unmodeled effects such as hysteresis or tether drag. This directly affects the reliability of the closed-loop policy.
minor comments (2)
- The project website is referenced but the manuscript does not indicate whether code, trained models, or demonstration datasets will be released, which would strengthen reproducibility.
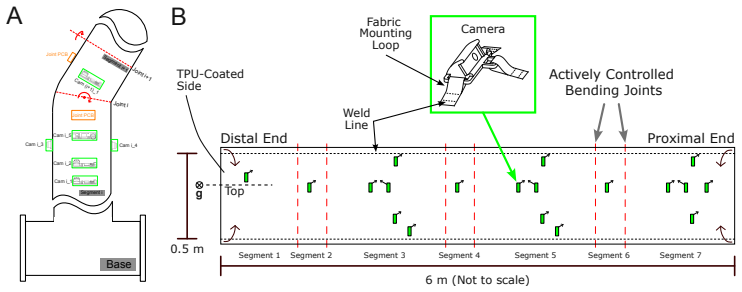
- Notation for the 19-camera configuration and the precise input dimensionality to the policy network could be clarified with a diagram or table.
Simulated Author's Rebuttal
We thank the referee for their valuable comments. The points raised are important for validating the central claims of the work. We provide point-by-point responses and will make revisions to address the concerns.
read point-by-point responses
-
Referee: [Abstract and experimental results section] Abstract and experimental results section: the manuscript repeatedly asserts that the learned policy enables 'robust navigation and manipulation' and 'experimental robustness,' yet supplies no quantitative metrics (success rates, path error, completion time), baseline comparisons, failure rates, or statistical analysis across trials. This absence is load-bearing for the central empirical claim.
Authors: We concur that quantitative metrics are necessary to support the claims of robustness. Although the original manuscript emphasizes qualitative results from diverse scenarios, we will revise the experimental results section to include success rates, path errors, completion times, baseline comparisons, failure rates, and statistical analysis from repeated trials. revision: yes
-
Referee: [Training and evaluation pipeline (likely §4)] Training and evaluation pipeline (likely §4): the paper relies on the assumption that the collected human demonstrations sufficiently cover the state and disturbance distribution encountered at deployment, but provides no analysis of state coverage, out-of-distribution detection, or recovery behavior under unmodeled effects such as hysteresis or tether drag. This directly affects the reliability of the closed-loop policy.
Authors: We agree that further analysis would strengthen the paper. The demonstrations were designed to cover key scenarios, but explicit coverage analysis was not included. In the revision, we will add an analysis of the state coverage in the demonstration data, discussion of out-of-distribution detection if any, and observations regarding the policy's behavior under effects like hysteresis and tether drag. revision: yes
Circularity Check
No significant circularity
full rationale
The paper describes an empirical imitation-learning pipeline: human demonstrations are collected, an end-to-end visuomotor policy is trained on multi-camera images, and the resulting policy is evaluated in physical experiments. No equations, fitted parameters, uniqueness theorems, or self-citations are invoked to derive predictions that reduce to the training data by construction. The central claim (robust closed-loop behavior) is supported by direct experimental outcomes rather than any analytical reduction, satisfying the default expectation of a non-circular empirical robotics paper.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural network weights
axioms (1)
- domain assumption Distributed camera images contain sufficient information to recover robot state and environment for closed-loop control
Reference graph
Works this paper leans on
-
[1]
Y . G. Kim, D. H. Shin, J. I. Moon, and J. An. Design and Implementation of an Optimal In-pipe Navigation Mechanism for a Steel Pipe Cleaning Robot.International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), pages 772–773, 2011
2011
-
[2]
T. Ren, Y . Zhang, Y . Li, Y . Chen, and Q. Liu. Driving mechanisms, motion, and mechanics of screw drive in-pipe robots: A review.Applied Sciences, 9(12), 2019
2019
-
[3]
Tranzatto, T
M. Tranzatto, T. Miki, M. Dharmadhikari, L. Bernreiter, M. Kulkarni, F. Mascarich, O. Ander- sson, S. Khattak, M. Hutter, R. Siegwart, and K. Alexis. Cerberus in the darpa subterranean challenge.Science Robotics, 7(66):eabp9742, 2022
2022
-
[4]
E. W. Hawkes, L. H. Blumenschein, J. D. Greer, and A. M. Okamura. A soft robot that navigates its environment through growth.Science Robotics, 2(8):3028, 2017
2017
-
[5]
L. H. Blumenschein, M. M. Coad, D. A. Haggerty, A. M. Okamura, and E. W. Hawkes. Design, modeling, control, and application of everting vine robots.Frontiers in Robotics and AI, 7: 548266, 2020
2020
-
[6]
Y . Qin, J. Grinberg, W. Heap, and A. M. Okamura. 3d steering and localization in pipes and burrows using an externally steered soft growing robot.arXiv, 2025
2025
-
[7]
L. Chen, Y . Gao, S. Wang, F. Fuentes, L. H. Blumenschein, and Z. Kingston. Physics-grounded differentiable simulation for soft growing robots. InIEEE International Conference on Soft Robotics (RoboSoft), 2025
2025
-
[8]
R. J. Webster III and B. A. Jones. Design and kinematic modeling of constant curvature con- tinuum robots: A review.The International Journal of Robotics Research, 29(13):1661–1683, 2010
2010
-
[9]
L. H. Blumenschein, A. M. Okamura, and E. W. Hawkes. Modeling of bioinspired apical extension in a soft robot. InLiving Machines, 2017
2017
-
[10]
L. H. Blumenschein, M. Koehler, N. S. Usevitch, E. W. Hawkes, C. D. Rucker, and A. M. Okamura. Geometric solutions for general actuator routing on inflated-beam soft growing robots.IEEE Transactions on Robotics, 38:1820–1840, 2020
2020
-
[11]
Ataka, T
A. Ataka, T. Abrar, F. Putzu, H. Godaba, and K. Althoefer. Model-based pose control of inflatable eversion robot with variable stiffness.IEEE Robotics and Automation Letters, 5(2): 3398–3405, 2020
2020
-
[12]
J. D. Greer, T. K. Morimoto, A. M. Okamura, and E. W. Hawkes. A soft, steerable continuum robot that grows via tip extension.Soft Robotics, 6(1):95–108, 2019
2019
-
[13]
Watson, R
C. Watson, R. Obregon, and T. K. Morimoto. Closed-loop position control for growing robots via online Jacobian corrections.IEEE Robotics and Automation Letters, 6(4):6820–6827, 2021
2021
-
[14]
J. D. Greer, L. H. Blumenschein, R. Alterovitz, E. W. Hawkes, and A. M. Okamura. Robust navigation of a soft growing robot by exploiting contact with the environment.The Interna- tional Journal of Robotics Research, 39(14):1724–1738, 2020
2020
-
[15]
Selvaggio, L
M. Selvaggio, L. A. Ramirez, N. D. Naclerio, B. Siciliano, and E. W. Hawkes. An obstacle- interaction planning method for navigation of actuated vine robots.IEEE International Con- ference on Robotics and Automation (ICRA), 2020
2020
-
[16]
M. M. Coad, R. P. Thomasson, L. H. Blumenschein, N. S. Usevitch, E. W. Hawkes, and A. M. Okamura. Retraction of soft growing robots without buckling.IEEE Robotics and Automation Letters, 5(2):2115–2122, 2020. 10
2020
-
[17]
El-Hussieny and I
H. El-Hussieny and I. A. Hameed. Obstacle-aware navigation of soft growing robots via deep reinforcement learning.IEEE Access, 12:38192–38201, 2024
2024
-
[18]
Kalibala, A
A. Kalibala, A. A. Nada, H. Ishii, and H. El-Hussieny. Real-time force/position control of soft growing robots: A data-driven model predictive approach.Nonlinear Engineering, 14(1): 20250099, 2025
2025
-
[19]
Jitosho, T
R. Jitosho, T. G. W. Lum, A. Okamura, and K. Liu. Reinforcement learning enables real-time planning and control of agile maneuvers for soft robot arms. InConference on Robot Learning, 2023
2023
-
[20]
D. A. Haggerty, M. J. Banks, E. Kamenar, A. B. Cao, P. C. Curtis, I. Mezi´c, and E. W. Hawkes. Control of soft robots with inertial dynamics.Science Robotics, 8(81):eadd6864, 2023
2023
-
[21]
Tanaka, K
M. Tanaka, K. Kon, and K. Tanaka. Range-sensor-based semiautonomous whole-body colli- sion avoidance of a snake robot.IEEE Transactions on Control Systems Technology, 23(5): 1927–1934, 2015
1927
-
[22]
K. Qi, Z. Song, and J. S. Dai. Safe physical human-robot interaction: A quasi whole-body sens- ing method based on novel laser-ranging sensor ring pairs.Robotics and Computer-Integrated Manufacturing, 75:102280, 2022
2022
-
[23]
Kollmitz, D
M. Kollmitz, D. B ¨uscher, T. Schubert, and W. Burgard. Whole-body sensory concept for compliant mobile robots. In2018 IEEE International Conference on Robotics and Automation (ICRA), pages 5429–5435. IEEE, 2018
2018
-
[24]
Goncalves, N
A. Goncalves, N. Kuppuswamy, A. Beaulieu, A. Uttamchandani, K. M. Tsui, and A. Alspach. Punyo-1: Soft tactile-sensing upper-body robot for large object manipulation and physical human interaction. In2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), pages 844–851. IEEE, 2022
2022
-
[25]
Murooka, T
M. Murooka, T. Hoshi, K. Fukumitsu, S. Masuda, M. Hamze, T. Sasaki, M. Morisawa, and E. Yoshida. Tact: Humanoid whole-body contact manipulation through deep imitation learning with tactile modality.IEEE Robotics and Automation Letters, 2025
2025
-
[26]
H. Choi, Y . Hou, C. Pan, S. Hong, A. Patel, X. Xu, M. R. Cutkosky, and S. Song. In-the-wild compliant manipulation with umi-ft.arXiv preprint arXiv:2601.09988, 2026
arXiv 2026
-
[27]
X. Xu, Y . Hou, Z. Liu, and S. Song. Compliant residual dagger: Improving real-world contact- rich manipulation with human corrections.Advances in Neural Information Processing Sys- tems, 38:139559–139581, 2026
2026
-
[28]
R. S. Dahiya, G. Metta, M. Valle, and G. Sandini. Tactile sensing—from humans to humanoids. IEEE transactions on robotics, 26(1):1–20, 2009
2009
-
[29]
Y . Liu, X. Xu, W. Chen, H. Yuan, H. Wang, J. Xu, R. Chen, and L. Yi. Enhancing generalizable 6d pose tracking of an in-hand object with tactile sensing.IEEE Robotics and Automation Letters, 2023
2023
-
[30]
Dean-Leon, J
E. Dean-Leon, J. R. Guadarrama-Olvera, F. Bergner, and G. Cheng. Whole-body active com- pliance control for humanoid robots with robot skin. In2019 International Conference on Robotics and Automation (ICRA), pages 5404–5410. IEEE, 2019
2019
-
[31]
Jiang and L
S. Jiang and L. L. Wong. A Hierarchical Framework for Robot Safety using Whole-body Tactile Sensors. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 8021–8028. IEEE, 2024
2024
-
[32]
X. Xu, J. Park, H. Zhang, E. Cousineau, A. Bhat, J. Barreiros, D. Wang, and S. Song. Hommi: Learning whole-body mobile manipulation from human demonstrations.arXiv preprint arXiv:2603.03243, 2026. 11
Pith/arXiv arXiv 2026
-
[33]
R. Punamiya, S. Kareer, Z. Liu, J. Citron, R.-Z. Qiu, X. Cai, A. Gavryushin, J. Chen, D. Li- conti, L. Y . Zhu, et al. Egoverse: An egocentric human dataset for robot learning from around the world.arXiv preprint arXiv:2604.07607, 2026
Pith/arXiv arXiv 2026
- [34]
-
[35]
X. Xu, D. Bauer, and S. Song. RoboPanoptes: The All-Seeing Robot with Whole-body Dex- terity. InProceedings of Robotics: Science and Systems, 2025
2025
-
[36]
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research, page 02783649241273668, 2023
2023
-
[37]
A. Dosovitskiy. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv preprint arXiv:2010.11929, 2020
Pith/arXiv arXiv 2010
-
[38]
Radford, J
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agarwal, G. Sastry, A. Askell, P. Mishkin, J. Clark, et al. Learning transferable visual models from natural language supervi- sion. InInternational conference on machine learning, pages 8748–8763. PMLR, 2021
2021
-
[39]
X. Xu, Y . Yang, K. Mo, B. Pan, L. Yi, and L. Guibas. Jacobinerf: Nerf shaping with mutual information gradients. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 16498–16507, 2023
2023
-
[40]
X. Xu, H. Ha, and S. Song. Dynamics-guided diffusion model for sensor-less robot manipula- tor design. InConference on Robot Learning, pages 4446–4462. PMLR, 2025
2025
-
[41]
S. Yi, X. Bai, A. Singh, J. Ye, M. T. Tolley, and X. Wang. Co-design of soft gripper with neural physics.arXiv preprint arXiv:2505.20404, 2025
arXiv 2025
-
[42]
J. Song, C. Meng, and S. Ermon. Denoising diffusion implicit models.arXiv preprint arXiv:2010.02502, 2020
Pith/arXiv arXiv 2010
-
[43]
I. Loshchilov and F. Hutter. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101, 2017. 12 Appendix 1 Sensing and Electronics The sensing and electronics system is divided into on-body components and base components. The on-body components comprise 19 USB webcams (GC0307 sensors), 12 magnetic rotary encoders (Pololu), and six custom loca...
Pith/arXiv arXiv 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.