Multi-Floor Exploration for Ground Robots via an Incremental Reachable Graph and Structural Priors
Pith reviewed 2026-05-25 04:22 UTC · model grok-4.3
The pith
Ground robots explore multi-floor buildings by maintaining an incremental reachable graph with projected structural priors from known floors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that an incremental reachable graph, constructed sparsely over reachable support surfaces and augmented by projected task-zone priors that initialize hypothetical structures on new floors, enables stable detection of physically reachable frontiers and global guidance across multiple floors without dense volumetric maps.
What carries the argument
Incremental reachable graph: a sparse graph over reachable support surfaces that retains tentative elements under sparse observations to maintain potential connectivity and support frontier detection.
If this is right
- Exploration proceeds beyond the currently mapped floor by using hypothetical graph elements for planning.
- Frontier detection remains stable because tentative connections are preserved until observations confirm or refute them.
- The hierarchical planner produces global guidance by jointly considering confirmed and hypothetical structures.
- Simulation trials show higher efficiency and mapping completeness than the evaluated baseline methods.
- Onboard real-world runs achieve real-time performance and practical feasibility in multi-floor settings.
Where Pith is reading between the lines
- The sparse graph approach may reduce memory and computation demands compared with full 3D reconstructions in vertically connected spaces.
- The projection and reconciliation steps could generalize to other environments that contain ramps or elevators once appropriate priors are defined.
- Integration with dynamic obstacle avoidance would test whether the tentative elements remain useful when the environment changes rapidly.
Load-bearing premise
Task-zone priors projected from an explored floor can initialize a hypothetical graph on the target floor and be reconciled incrementally with observations without creating unreachable or invalid connections.
What would settle it
A test case in which projected priors produce persistent invalid connectivity that incremental updates never resolve, causing the planner to select unreachable frontiers or fail to advance to new floors.
Figures





read the original abstract
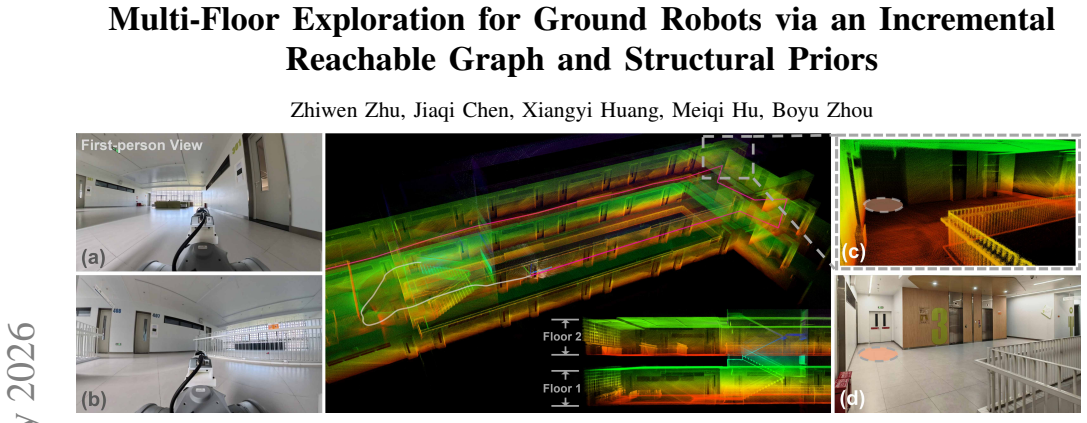
Autonomous exploration of multi-floor buildings remains challenging for ground robots because conventional 2D and 2.5D maps cannot represent overlapping traversable surfaces such as stairs, ramps, and multiple reachable elevations. This letter presents a multi-floor exploration framework based on an incremental reachable graph. Built as a sparse graph over reachable support surfaces, the graph preserves potentially valid connectivity through tentative graph elements under sparse observations and enables stable, physically reachable frontier detection. To guide exploration beyond the currently mapped floor, we project task-zone priors from an explored floor to initialize a hypothetical graph on the target floor and reconcile it incrementally with incoming observations. A hierarchical planner then jointly reasons over confirmed and hypothetical structures for global guidance. In simulation, the proposed method demonstrates improved exploration efficiency and mapping completeness compared to evaluated baselines. Furthermore, onboard real-world experiments validate its practical feasibility and real-time performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a multi-floor exploration framework for ground robots based on an incremental reachable graph over reachable support surfaces. The graph uses tentative elements to preserve connectivity under sparse observations and enables stable frontier detection. Task-zone priors are projected from explored floors to initialize hypothetical graphs on target floors, which are reconciled incrementally with new observations. A hierarchical planner reasons jointly over confirmed and hypothetical structures. In simulation, it shows improved exploration efficiency and mapping completeness over baselines, and real-world onboard experiments validate feasibility and real-time performance.
Significance. If the claims hold, this work addresses an important challenge in robotics by enabling efficient multi-floor exploration where standard 2D and 2.5D maps are insufficient. The incremental reachable graph with structural priors and the hierarchical planner represent a promising approach for handling vertical connectivity in buildings. The inclusion of both simulation comparisons and real-world validation is a strength, providing evidence of practical applicability.
minor comments (1)
- [Abstract] Abstract: Consider specifying the number of simulation trials or the exact metrics used for 'improved exploration efficiency' to strengthen the claim.
Simulated Author's Rebuttal
We thank the referee for the positive summary of our work on multi-floor exploration via an incremental reachable graph and structural priors, as well as the recommendation for minor revision. We appreciate the recognition of the approach's potential for handling vertical connectivity in buildings and the value placed on both simulation and real-world validation.
Circularity Check
No significant circularity; derivation self-contained
full rationale
The provided abstract and context describe a method using an incremental reachable graph, projection of task-zone priors, incremental reconciliation, and a hierarchical planner. No equations, fitted parameters, self-citations, or derivation steps are present that reduce a claimed prediction or result to its own inputs by construction. The central claims rest on the described algorithmic mechanisms and external experimental validation rather than self-referential definitions or renamings. No load-bearing step matches any enumerated circularity pattern.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Using occupancy grids for mobile robot perception and navigation,
A. Elfes, “Using occupancy grids for mobile robot perception and navigation,”Computer, vol. 22, no. 6, pp. 46–57, 1989
work page 1989
-
[2]
Universal trajectory optimization framework for differential drive robot class,
M. Zhang, N. Chen, H. Wang, J. Qiu, Z. Han, Q. Ren, C. Xu, F. Gao, and Y . Cao, “Universal trajectory optimization framework for differential drive robot class,”IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 13 030–13 045, 2025
work page 2025
-
[3]
Elevation mapping for locomotion and navigation using gpu,
T. Miki, L. Wellhausen, R. Grandia, F. Jenelten, T. Homberger, and M. Hutter, “Elevation mapping for locomotion and navigation using gpu,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 2273–2280
work page 2022
-
[4]
M. Oh, B. Yu, I. M. A. Nahrendra, S. Jang, H. Lee, D. Lee, S. Lee, Y . Kim, M. K. Christiansen, H. Lim, and H. Myung, “Trip: Terrain traversability mapping with risk-aware prediction for enhanced online quadrupedal robot navigation,”arXiv preprint arXiv:2411.17134, 2024
-
[5]
Real-time spatial-temporal traversability assessment via feature-based sparse gaussian process,
S. Tan, Z. Hou, Z. Zhang, L. Xu, M. Zhang, Z. He, C. Xu, F. Gao, and Y . Cao, “Real-time spatial-temporal traversability assessment via feature-based sparse gaussian process,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 17 533–17 540
work page 2025
-
[6]
P. Kr ¨usi, P. Furgale, M. Bosse, and R. Siegwart, “Driving on point clouds: Motion planning, trajectory optimization, and terrain assessment in generic nonplanar environments,”Journal of Field Robotics, vol. 34, no. 5, pp. 940–984, 2017
work page 2017
-
[7]
M. Brandao, O. B. Aladag, and I. Havoutis, “Gaitmesh: Controller-aware navigation meshes for long-range legged locomotion planning in multi- layered environments,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3596–3603, 2020
work page 2020
-
[8]
Putn: A plane-fitting based uneven terrain navigation framework,
Z. Jian, Z. Lu, X. Zhou, B. Lan, A. Xiao, X. Wang, and B. Liang, “Putn: A plane-fitting based uneven terrain navigation framework,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 7160–7166
work page 2022
-
[9]
Pare: A plane-assisted autonomous robot exploration framework in unknown and uneven terrain,
P. Xu, Z. Bai, H. Liu, and Z. Fang, “Pare: A plane-assisted autonomous robot exploration framework in unknown and uneven terrain,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 11 707–11 714
work page 2024
-
[10]
Efficient trajectory generation based on traversable planes in 3d complex archi- tectural spaces,
M. Zhang, Z. Tian, Y . Xia, C. Xu, F. Gao, and Y . Cao, “Efficient trajectory generation based on traversable planes in 3d complex archi- tectural spaces,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 14 513–14 519
work page 2025
-
[11]
Efficient global nav- igational planning in 3-d structures based on point cloud tomography,
B. Yang, J. Cheng, B. Xue, J. Jiao, and M. Liu, “Efficient global nav- igational planning in 3-d structures based on point cloud tomography,” IEEE/ASME Transactions on Mechatronics, vol. 30, no. 1, 2025
work page 2025
-
[12]
Y . Li, K. Chen, Y . Wang, W. Zhang, J. Wang, H. Chen, and Y . Liu, “Real- time multilevel terrain-aware path planning for ground mobile robots in large-scale rough terrains,”IEEE Transactions on Robotics, vol. 41, pp. 4159–4179, 2025
work page 2025
-
[13]
D. Lee, I. M. A. Nahrendra, M. Oh, B. Yu, and H. Myung, “Trg-planner: Traversal risk graph-based path planning in unstructured environments for safe and efficient navigation,”IEEE Robotics and Automation Letters, vol. 10, no. 2, pp. 1736–1743, 2025
work page 2025
-
[14]
Frontier-based exploration using multiple robots,
B. Yamauchi, “Frontier-based exploration using multiple robots,” in Proceedings of the second international conference on Autonomous agents, 1998, pp. 47–53
work page 1998
-
[15]
A. Bircher, M. Kamel, K. Alexis, H. Oleynikova, and R. Siegwart, “Receding horizon” next-best-view” planner for 3d exploration,” in 2016 IEEE international conference on robotics and automation (ICRA). IEEE, 2016, pp. 1462–1468
work page 2016
-
[16]
Fuel: Fast uav exploration using incremental frontier structure and hierarchical planning,
B. Zhou, Y . Zhang, X. Chen, and S. Shen, “Fuel: Fast uav exploration using incremental frontier structure and hierarchical planning,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 779–786, 2021
work page 2021
-
[17]
Tare: A hierarchical frame- work for efficiently exploring complex 3d environments
C. Cao, H. Zhu, H. Choset, and J. Zhang, “Tare: A hierarchical frame- work for efficiently exploring complex 3d environments.” inRobotics: Science and Systems, vol. 5, 2021
work page 2021
-
[18]
Falcon: Fast autonomous aerial exploration using coverage path guidance,
Y . Zhang, X. Chen, C. Feng, B. Zhou, and S. Shen, “Falcon: Fast autonomous aerial exploration using coverage path guidance,”IEEE Transactions on Robotics, 2024
work page 2024
-
[19]
Racer: Rapid collaborative exploration with a decentralized multi-uav system,
B. Zhou, H. Xu, and S. Shen, “Racer: Rapid collaborative exploration with a decentralized multi-uav system,”IEEE Transactions on Robotics, 2023
work page 2023
-
[20]
Sfre: Safe and fast robotic exploration for 3d uneven terrains,
S. Liu, R. Wang, Q. Bi, G. Wen, and X. Zhang, “Sfre: Safe and fast robotic exploration for 3d uneven terrains,” in2024 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). IEEE, 2024, pp. 1–6
work page 2024
-
[21]
Actively mapping industrial structures with information gain-based planning on a quadruped robot,
Y . Wang, M. Ramezani, and M. Fallon, “Actively mapping industrial structures with information gain-based planning on a quadruped robot,” IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 7535–7542, 2020
work page 2020
-
[22]
Three-dimensional terrain aware autonomous exploration for subterranean and confined spaces,
H. Azpurua, M. F. M. Campos, and D. G. Macharet, “Three-dimensional terrain aware autonomous exploration for subterranean and confined spaces,” in2021 IEEE International Conference on Robotics and Au- tomation (ICRA). IEEE, 2021, pp. 2443–2449
work page 2021
-
[23]
Fael: Fast autonomous exploration for large-scale environments with a mobile robot,
J. Huang, B. Zhou, Z. Fan, Y . Zhu, Y . Jie, L. Li, and H. Cheng, “Fael: Fast autonomous exploration for large-scale environments with a mobile robot,”IEEE Robotics and Automation Letters, vol. 8, no. 3, pp. 1667– 1674, 2023
work page 2023
-
[24]
Lite: A learning-integrated topological explorer for multi-floor indoor envi- ronments,
J. Chen, Z. Zhang, C. Zhu, X. Hou, T. Hu, H. Wu, and Y . Liu, “Lite: A learning-integrated topological explorer for multi-floor indoor envi- ronments,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 9533–9540
work page 2025
-
[25]
Unlocking full exploration potential of ground robots by multiresolution topological mapping,
Y . Jia, C. Wang, W. Tang, Z. Wang, and Z. Sun, “Unlocking full exploration potential of ground robots by multiresolution topological mapping,”IEEE Transactions on Industrial Informatics, vol. 21, no. 8, pp. 6387–6397, 2025
work page 2025
-
[26]
Fast-lio2: Fast direct lidar- inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar- inertial odometry,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2053–2073, 2022
work page 2053
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.