How Should a Robot Configure Its Laser Scanner for Inspection?
Pith reviewed 2026-06-26 14:31 UTC · model grok-4.3
The pith
SenseHD selects stable laser scanner configurations using hyperdimensional associative memory to improve robotic inspection reliability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SenseHD formulates scanner configuration as an instruction-conditioned sensing decision where parameters are treated as discrete sensing actions. It selects stable sensing regimes through hyperdimensional associative memory. On a real robotic inspection platform, this approach robustly selects appropriate configurations and significantly improves inspection reliability compared to baseline methods while remaining lightweight and efficient.
What carries the argument
hyperdimensional associative memory that maps instructions to stable discrete sensing regimes for laser scanner parameters
If this is right
- SenseHD improves inspection reliability on real robotic platforms.
- It remains lightweight and efficient compared to baseline methods.
- It robustly selects appropriate sensing configurations.
- Framing parameters as discrete actions avoids needing precise value prediction.
Where Pith is reading between the lines
- Similar approaches could apply to configuring other sensors in robotic systems.
- The method might scale to dynamic environments where instructions change frequently.
- Testing on different hardware platforms could reveal how general the hyperdimensional selection is.
Load-bearing premise
Framing scanner parameters as discrete sensing actions and selecting them via hyperdimensional associative memory produces stable regimes that improve measurement quality better than continuous optimization methods.
What would settle it
Running the same robotic inspection tasks with continuous optimization of scanner parameters and finding that measurement quality does not improve or is worse than with SenseHD.
Figures
read the original abstract
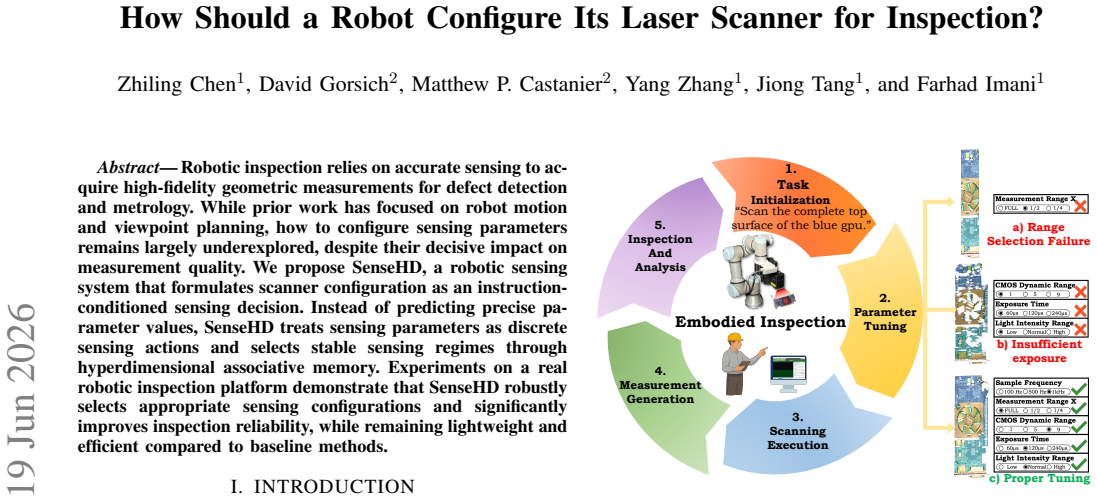
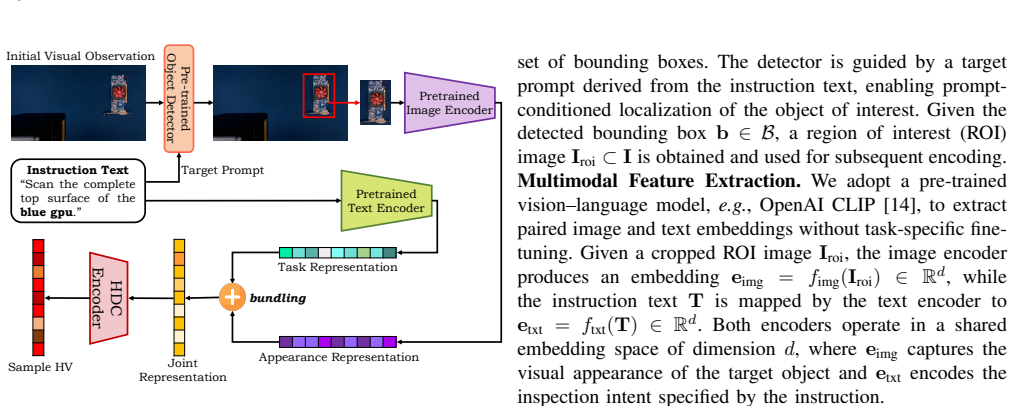
Robotic inspection relies on accurate sensing to acquire high-fidelity geometric measurements for defect detection and metrology. While prior work has focused on robot motion and viewpoint planning, how to configure sensing parameters remains largely underexplored, despite their decisive impact on measurement quality. We propose SenseHD, a robotic sensing system that formulates scanner configuration as an instruction-conditioned sensing decision. Instead of predicting precise parameter values, SenseHD treats sensing parameters as discrete sensing actions and selects stable sensing regimes through hyperdimensional associative memory. Experiments on a real robotic inspection platform demonstrate that SenseHD robustly selects appropriate sensing configurations and significantly improves inspection reliability, while remaining lightweight and efficient compared to baseline methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
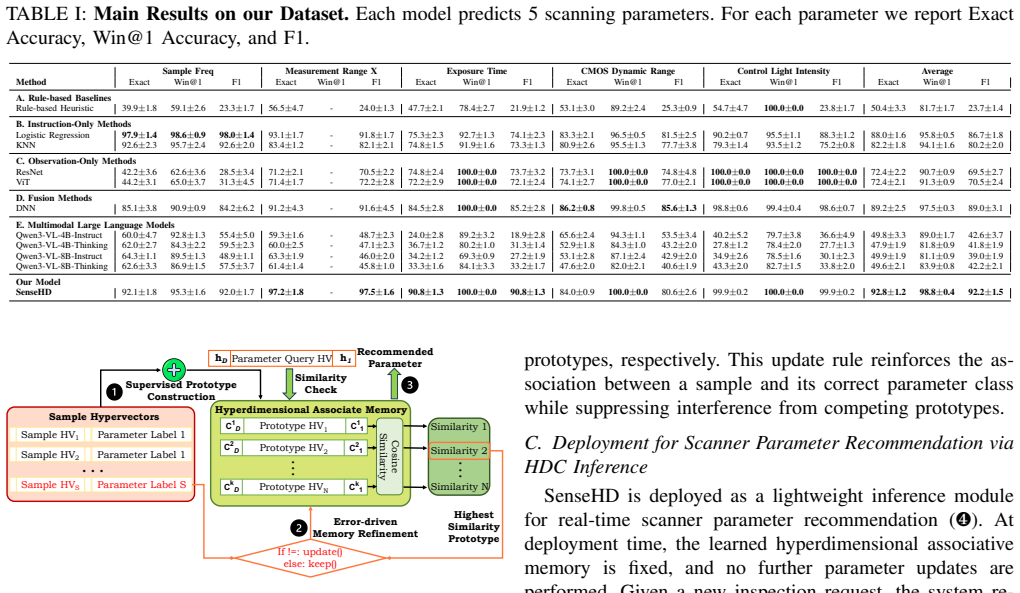
Summary. The manuscript proposes SenseHD, a system that formulates laser scanner configuration for robotic inspection as discrete sensing actions selected via hyperdimensional associative memory conditioned on instructions. It claims that real-platform experiments demonstrate robust selection of appropriate configurations, significant improvement in inspection reliability over baselines, and that the method remains lightweight and efficient.
Significance. If the experimental claims are substantiated with quantitative evidence, the work could contribute a lightweight hyperdimensional-computing approach to sensing-parameter selection that avoids continuous optimization, potentially improving reliability in metrology tasks. However, the current manuscript supplies no metrics, baselines, or implementation details, preventing assessment of whether the result would meaningfully advance the field.
major comments (1)
- [Abstract] Abstract: The central claim that 'experiments on a real robotic inspection platform demonstrate that SenseHD ... significantly improves inspection reliability' is unsupported by any quantitative results (e.g., defect detection rates, metrology error, statistical tests), baseline definitions, discretization scheme for sensing parameters, or details on hyperdimensional memory construction and associative recall. This absence makes it impossible to verify that the selected regimes are stable or superior rather than artifacts of the setup.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive comments. We will revise the manuscript to address the concerns regarding the lack of quantitative evidence supporting our claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'experiments on a real robotic inspection platform demonstrate that SenseHD ... significantly improves inspection reliability' is unsupported by any quantitative results (e.g., defect detection rates, metrology error, statistical tests), baseline definitions, discretization scheme for sensing parameters, or details on hyperdimensional memory construction and associative recall. This absence makes it impossible to verify that the selected regimes are stable or superior rather than artifacts of the setup.
Authors: We acknowledge that the current version of the manuscript does not include the specific quantitative metrics, baseline comparisons, or implementation details. In the revised version, we will add quantitative results from the experiments including defect detection rates, metrology errors, and statistical tests; define the baselines; describe the discretization scheme for sensing parameters; and provide details on hyperdimensional memory construction and associative recall. These additions will substantiate the claims and allow assessment of the method's performance. revision: yes
Circularity Check
No circularity: empirical claims rest on platform experiments without derivations or self-referential fits
full rationale
The provided abstract and description contain no equations, parameter-fitting procedures, uniqueness theorems, or self-citations that could reduce any claimed result to its inputs by construction. SenseHD is presented as a formulation that selects discrete sensing regimes via hyperdimensional memory, with the central claim supported solely by reported real-platform experiments comparing reliability and efficiency to baselines. This structure is self-contained against external benchmarks and exhibits none of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
invented entities (1)
-
SenseHD
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Quality control in manufacturing–review and challenges on robotic applications,
A. Papavasileiou, G. Michalos, and S. Makris, “Quality control in manufacturing–review and challenges on robotic applications,”Inter- national Journal of Computer Integrated Manufacturing, vol. 38, no. 1, pp. 79–115, 2025
2025
-
[2]
A survey on inspecting structures using robotic systems,
R. Almadhoun, T. Taha, L. Seneviratne, J. Dias, and G. Cai, “A survey on inspecting structures using robotic systems,”International Journal of Advanced Robotic Systems, vol. 13, no. 6, p. 1729881416663664, 2016
2016
-
[3]
Active perception,
R. Bajcsy, “Active perception,”Proceedings of the IEEE, vol. 76, no. 8, pp. 966–1005, 1988
1988
-
[4]
Revisiting active per- ception,
R. Bajcsy, Y . Aloimonos, and J. K. Tsotsos, “Revisiting active per- ception,”Autonomous Robots, vol. 42, no. 2, pp. 177–196, 2018
2018
-
[5]
ScanBot: A Benchmark for Precision Robotic Surface Scanning with Industrial Laser Profilers
Z. Chen, Y . Zhang, F. J. Piran, Q. Zhou, J. Tang, and F. Imani, “Scanbot: Towards intelligent surface scanning in embodied robotic systems,”arXiv preprint arXiv:2505.17295, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[6]
Camera exposure control for robust robot vision with noise-aware image quality assessment,
U. Shin, J. Park, G. Shim, F. Rameau, and I. S. Kweon, “Camera exposure control for robust robot vision with noise-aware image quality assessment,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019, pp. 1165–1172
2019
-
[7]
An overview of next-generation manu- facturing execution systems: How important is mes for industry 4.0?
S. Mantravadi and C. Møller, “An overview of next-generation manu- facturing execution systems: How important is mes for industry 4.0?” Procedia manufacturing, vol. 30, pp. 588–595, 2019
2019
-
[8]
Classification using hyperdimensional com- puting: A review,
L. Ge and K. K. Parhi, “Classification using hyperdimensional com- puting: A review,”IEEE Circuits and Systems Magazine, vol. 20, no. 2, pp. 30–47, 2020
2020
-
[9]
Hyperdimensional computing: An introduction to com- puting in distributed representation with high-dimensional random vectors,
P. Kanerva, “Hyperdimensional computing: An introduction to com- puting in distributed representation with high-dimensional random vectors,”Cognitive computation, vol. 1, no. 2, pp. 139–159, 2009
2009
-
[10]
Brain-inspired hyperdimensional computing in the wild: Lightweight symbolic learning for sensorimotor controls of wheeled robots,
H. Kwon, K. Kim, J. Lee, H. Lee, J. Kim, J. Kim, T. Kim, Y . Kim, Y . Ni, M. Imaniet al., “Brain-inspired hyperdimensional computing in the wild: Lightweight symbolic learning for sensorimotor controls of wheeled robots,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 5176–5182
2024
-
[11]
Navhd: Low-power learning for micro-robotic controls in the wild,
C. Y . Lee, S. Achour, and Z. Kapetanovic, “Navhd: Low-power learning for micro-robotic controls in the wild,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, pp. 13 399–13 405
2025
-
[12]
Hdpg: Hyperdimensional policy-based reinforcement learning for continuous control,
Y . Ni, M. Issa, D. Abraham, M. Imani, X. Yin, and M. Imani, “Hdpg: Hyperdimensional policy-based reinforcement learning for continuous control,” inProceedings of the 59th ACM/IEEE Design Automation Conference, 2022, pp. 1141–1146
2022
-
[13]
Yolo- world: Real-time open-vocabulary object detection,
T. Cheng, L. Song, Y . Ge, W. Liu, X. Wang, and Y . Shan, “Yolo- world: Real-time open-vocabulary object detection,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 16 901–16 911
2024
-
[14]
Learning transferable visual models from natural language supervision,
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agarwal, G. Sastry, A. Askell, P. Mishkin, J. Clarket al., “Learning transferable visual models from natural language supervision,” inInternational conference on machine learning. PmLR, 2021, pp. 8748–8763
2021
-
[15]
Onlinehd: Robust, efficient, and single-pass online learning using hyperdimen- sional system,
A. Hern ´andez-Cano, N. Matsumoto, E. Ping, and M. Imani, “Onlinehd: Robust, efficient, and single-pass online learning using hyperdimen- sional system,” in2021 Design, Automation & Test in Europe Con- ference & Exhibition (DATE). IEEE, 2021, pp. 56–61
2021
-
[16]
Deep residual learning for image recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 770–778
2016
-
[17]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
A. Dosovitskiy, L. Beyer, A. Kolesnikov, D. Weissenborn, X. Zhai, T. Unterthiner, M. Dehghani, M. Minderer, G. Heigold, S. Gellyet al., “An image is worth 16x16 words: Transformers for image recognition at scale,”arXiv preprint arXiv:2010.11929, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[18]
S. Bai, Y . Cai, R. Chen, K. Chen, X. Chen, Z. Cheng, L. Deng, W. Ding, C. Gao, C. Ge, W. Ge, Z. Guo, Q. Huang, J. Huang, F. Huang, B. Hui, S. Jiang, Z. Li, M. Li, M. Li, K. Li, Z. Lin, J. Lin, X. Liu, J. Liu, C. Liu, Y . Liu, D. Liu, S. Liu, D. Lu, R. Luo, C. Lv, R. Men, L. Meng, X. Ren, X. Ren, S. Song, Y . Sun, J. Tang, J. Tu, J. Wan, P. Wang, P. Wang,...
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.