Real-Time Physics Simulation with Dynamic Mesh-Gaussian Reconstructions
Pith reviewed 2026-06-28 19:27 UTC · model grok-4.3
The pith
Converting high-quality dynamic 3D reconstructions to fixed-topology meshes for physics causes 65-80 percent geometric degradation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
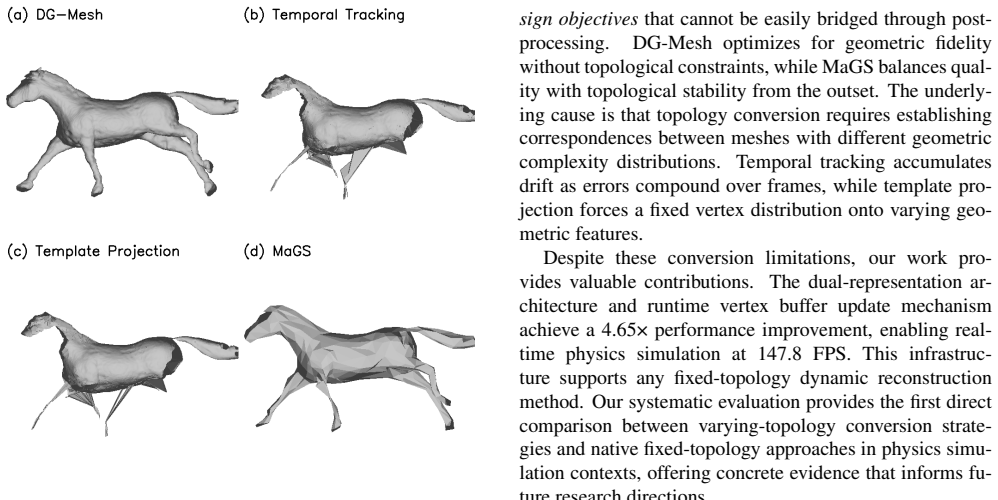
High-quality reconstruction and physics-compatible topology represent fundamentally distinct objectives that cannot be reconciled through post-processing, because both tested conversion strategies from varying-topology reconstructions produced 65-80 percent geometric degradation and performed worse than native fixed-topology methods.
What carries the argument
Dual-representation framework that pairs fixed-topology meshes for physics collision detection with Gaussian splatting for rendering and performs runtime vertex buffer updates.
If this is right
- Real-time physics simulation achieves a 4.65 times speedup compared with methods that must handle varying topology during runtime.
- The dual framework allows any fixed-topology reconstruction method to support real-time physics simulation.
- Future reconstruction algorithms should incorporate fixed topology constraints during optimization rather than relying on later conversion.
Where Pith is reading between the lines
- Reconstruction methods may need to optimize geometry and topology constraints simultaneously instead of separating the concerns.
- The same incompatibility could limit other applications that combine high-fidelity rendering with real-time physical interaction.
Load-bearing premise
The two tested conversion strategies are representative of the best results possible with any post-processing approach.
What would settle it
A conversion method that produces fixed-topology meshes while retaining geometric quality comparable to the original varying-topology reconstructions would disprove the claim.
Figures
read the original abstract
Integrating dynamic 3D reconstructions into physics simulation requires fixed mesh topology for efficient collision detection, but state-of-the-art methods like DG-Mesh produce varying topology optimized for geometric quality. We investigate whether topology conversion can enable physics integration while preserving reconstruction fidelity. We propose a dual-representation framework combining fixed-topology meshes for physics with Gaussian splatting for rendering, achieving 4.65$\times$ speedup over varying-topology baselines through runtime vertex buffer updates. We evaluate two conversion strategies, temporal correspondence tracking and template-based projection, against native fixed-topology methods (MaGS) on the DG-Mesh dataset. Our evaluation reveals that both conversion approaches incur 65-80% geometric degradation, producing results inferior to MaGS despite DG-Mesh's superior initial quality. This demonstrates that high-quality reconstruction and physics-compatible topology represent fundamentally distinct objectives that cannot be reconciled through post-processing. Our findings inform future development of physics-aware reconstruction methods and our framework enables real-time simulation with any fixed-topology approach.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a dual-representation framework combining fixed-topology meshes for physics simulation with Gaussian splatting for rendering, reporting a 4.65× speedup over varying-topology baselines via runtime vertex buffer updates. It evaluates two post-processing conversion strategies (temporal correspondence tracking and template-based projection) against native fixed-topology methods like MaGS on the DG-Mesh dataset, finding 65-80% geometric degradation for both, and concludes that high-quality reconstruction and physics-compatible topology are fundamentally distinct objectives that cannot be reconciled through post-processing.
Significance. If the empirical finding on degradation holds under broader testing, the result would usefully inform the field by showing that post-hoc topology conversion is not a reliable bridge between reconstruction quality and simulation requirements, encouraging development of physics-aware reconstruction pipelines instead. The dual framework itself provides a concrete engineering contribution for real-time integration of any fixed-topology mesh method. The work is an empirical comparison without invented parameters or circular derivations.
major comments (2)
- [Abstract] Abstract: the central claim that the objectives 'cannot be reconciled through post-processing' is load-bearing on the assumption that the two tested strategies (temporal correspondence tracking and template-based projection) are representative of the post-processing design space. No argument, ablation, or comparison to alternatives (e.g., learning-based topology transfer or differentiable remeshing) is provided to support this representativeness, so the negative result does not yet establish the stronger conclusion.
- [Abstract] Abstract (evaluation description): the reported 65-80% geometric degradation figures are presented without error bars, statistical significance tests, variance across sequences, or implementation details of the conversion methods, undermining assessment of whether the inferiority to MaGS is robust.
Simulated Author's Rebuttal
Thank you for the opportunity to respond to the referee's comments. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the objectives 'cannot be reconciled through post-processing' is load-bearing on the assumption that the two tested strategies (temporal correspondence tracking and template-based projection) are representative of the post-processing design space. No argument, ablation, or comparison to alternatives (e.g., learning-based topology transfer or differentiable remeshing) is provided to support this representativeness, so the negative result does not yet establish the stronger conclusion.
Authors: We agree that the strong phrasing in the abstract—that the objectives cannot be reconciled through post-processing—is not fully supported without evidence that the two tested strategies are representative of the full design space. Our evaluation was limited to temporal correspondence tracking and template-based projection as standard post-processing approaches from the dynamic reconstruction literature. We will revise the abstract to moderate the conclusion to state that these specific post-processing strategies incur substantial degradation and underperform native fixed-topology methods, and we will add a brief discussion of this limitation along with the suggestion that learning-based alternatives remain an open direction. revision: yes
-
Referee: [Abstract] Abstract (evaluation description): the reported 65-80% geometric degradation figures are presented without error bars, statistical significance tests, variance across sequences, or implementation details of the conversion methods, undermining assessment of whether the inferiority to MaGS is robust.
Authors: We agree that the presentation of the 65-80% degradation figures would be strengthened by additional statistical details. These figures are averages computed over the DG-Mesh dataset, but we will incorporate error bars (standard deviation across sequences), report per-sequence variance, and expand the implementation details of both conversion methods in the revised manuscript (main text or supplementary material) to improve robustness assessment. revision: yes
Circularity Check
No circularity; empirical comparison is self-contained
full rationale
The paper conducts an empirical evaluation of two post-processing conversion strategies (temporal correspondence tracking and template-based projection) against native fixed-topology methods like MaGS, reporting 65-80% geometric degradation on the DG-Mesh dataset. The conclusion that reconstruction quality and fixed topology are distinct objectives follows from these direct performance measurements without any equations, fitted parameters presented as predictions, self-definitional constructs, or load-bearing self-citations that reduce the result to its inputs by construction. The derivation chain consists of experimental observation and comparison, which remains independent of the reported outcomes.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Physics simulation requires fixed mesh topology for efficient collision detection.
Reference graph
Works this paper leans on
-
[1]
Genesis: A generative and universal physics engine for robotics and beyond, 2024
Genesis Authors. Genesis: A generative and universal physics engine for robotics and beyond, 2024. 1, 2
2024
-
[2]
Gasp: Gaussian splatting for physic-based simulations
Piotr Borycki, Weronika Smolak, Joanna Waczy ´nska, Marcin Mazur, Sławomir Tadeja, and Przemysław Spurek. Gasp: Gaussian splatting for physic-based simulations
-
[3]
Pybullet, a python mod- ule for physics simulation for games, robotics and machine learning.http://pybullet.org, 2016–2021
Erwin Coumans and Yunfei Bai. Pybullet, a python mod- ule for physics simulation for games, robotics and machine learning.http://pybullet.org, 2016–2021. 2
2016
-
[4]
Dynamic view synthesis from dynamic monocular video
Chen Gao, Ayush Saraf, Johannes Kopf, and Jia-Bin Huang. Dynamic view synthesis from dynamic monocular video. In Proceedings of the IEEE International Conference on Com- puter Vision, 2021. 1
2021
-
[5]
Sugar: Surface- aligned gaussian splatting for efficient 3d mesh reconstruc- tion and high-quality mesh rendering.CVPR, 2024
Antoine Gu ´edon and Vincent Lepetit. Sugar: Surface- aligned gaussian splatting for efficient 3d mesh reconstruc- tion and high-quality mesh rendering.CVPR, 2024. 2
2024
-
[6]
Karen Liu, Tuur Stuyck, and Egor Larionov
Michelle Guo, Matt Jen-Yuan Chiang, Igor Santesteban, Nikolaos Sarafianos, Hsiao-Yu Chen, Oshri Halimi, Alja ˇz Boˇziˇc, Shunsuke Saito, Jiajun Wu, C. Karen Liu, Tuur Stuyck, and Egor Larionov. Pgc: Physics-based gaussian cloth from a single pose. In2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 21215–21225, 2025. 2
2025
-
[7]
Yi-Hua Huang, Yang-Tian Sun, Ziyi Yang, Xiaoyang Lyu, Yan-Pei Cao, and Xiaojuan Qi. Sc-gs: Sparse-controlled gaussian splatting for editable dynamic scenes.arXiv preprint arXiv:2312.14937, 2023. 2
-
[8]
3d gaussian splatting for real-time radiance field rendering.ACM Transactions on Graphics, 42 (4), 2023
Bernhard Kerbl, Georgios Kopanas, Thomas Leimk ¨uhler, and George Drettakis. 3d gaussian splatting for real-time radiance field rendering.ACM Transactions on Graphics, 42 (4), 2023. 1, 2
2023
-
[9]
Dynamic gaus- sians mesh: Consistent mesh reconstruction from monocular videos, 2024
Isabella Liu, Hao Su, and Xiaolong Wang. Dynamic gaus- sians mesh: Consistent mesh reconstruction from monocular videos, 2024. 1, 2, 3
2024
-
[10]
Matthew Loper, Naureen Mahmood, Javier Romero, Ger- ard Pons-Moll, and Michael J. Black. SMPL: A skinned multi-person linear model.ACM Trans. Graphics (Proc. SIGGRAPH Asia), 34(6):248:1–248:16, 2015. 2
2015
-
[11]
Dynamic 3d gaussians: Tracking by per- sistent dynamic view synthesis
Jonathon Luiten, Georgios Kopanas, Bastian Leibe, and Deva Ramanan. Dynamic 3d gaussians: Tracking by per- sistent dynamic view synthesis. In3DV, 2024. 2
2024
-
[12]
Mags: Re- constructing and simulating dynamic 3d objects with mesh- adsorbed gaussian splatting
Shaojie Ma, Yawei Luo, Wei Yang, and Yi Yang. Mags: Re- constructing and simulating dynamic 3d objects with mesh- adsorbed gaussian splatting. 2024. 1, 2, 3
2024
-
[13]
Srinivasan, Matthew Tancik, Jonathan T
Ben Mildenhall, Pratul P. Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view syn- thesis. InECCV, 2020. 1
2020
-
[14]
Splat- ting physical scenes: End-to-end real-to-sim from imperfect robot data, 2025
Ben Moran, Mauro Comi, Arunkumar Byravan, Steven Bo- hez, Tom Erez, Zhibin Li, and Leonard Hasenclever. Splat- ting physical scenes: End-to-end real-to-sim from imperfect robot data, 2025. 2
2025
-
[15]
Barron, Sofien Bouaziz, Dan B Goldman, Steven M
Keunhong Park, Utkarsh Sinha, Jonathan T. Barron, Sofien Bouaziz, Dan B Goldman, Steven M. Seitz, and Ricardo Martin-Brualla. Nerfies: Deformable neural radiance fields. ICCV, 2021. 1
2021
-
[16]
Gs-verse: Mesh-based gaussian splat- ting for physics-aware interaction in virtual reality, 2025
Anastasiya Pechko, Piotr Borycki, Joanna Waczy ´nska, Daniel Barczyk, Agata Szyma ´nska, Sławomir Tadeja, and Przemysław Spurek. Gs-verse: Mesh-based gaussian splat- ting for physics-aware interaction in virtual reality, 2025. 1
2025
-
[17]
Albert Pumarola, Enric Corona, Gerard Pons-Moll, and Francesc Moreno-Noguer. D-nerf: Neural radiance fields for dynamic scenes.arXiv preprint arXiv:2011.13961, 2020. 1
-
[18]
Gaus- sianavatars: Photorealistic head avatars with rigged 3d gaus- sians
Shenhan Qian, Tobias Kirschstein, Liam Schoneveld, Davide Davoli, Simon Giebenhain, and Matthias Nießner. Gaus- sianavatars: Photorealistic head avatars with rigged 3d gaus- sians. InProceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition, pages 20299–20309,
-
[19]
Black, Bernhard Thomaszewski, Christina Tsalicoglou, and Otmar Hilliges
Boxiang Rong, Artur Grigorev, Wenbo Wang, Michael J. Black, Bernhard Thomaszewski, Christina Tsalicoglou, and Otmar Hilliges. Gaussian Garments: Reconstruct- ing simulation-ready clothing with photorealistic appearance from multi-view video. InInternational Conference on 3D Vision 2025, 2025. 2
2025
-
[20]
As-rigid-as-possible surface modeling
Olga Sorkine and Marc Alexa. As-rigid-as-possible surface modeling. InProceedings of EUROGRAPHICS/ACM SIG- GRAPH Symposium on Geometry Processing, pages 109– 116, 2007. 2
2007
-
[21]
Mujoco: A physics engine for model-based control
Emanuel Todorov, Tom Erez, and Yuval Tassa. Mujoco: A physics engine for model-based control. In2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 5026–5033. IEEE, 2012. 1, 2
2012
-
[22]
Games: Mesh-based adapt- ing and modification of gaussian splatting
Joanna Waczy ´nska, Piotr Borycki, Sławomir Tadeja, Jacek Tabor, and Przemysław Spurek. Games: Mesh-based adapt- ing and modification of gaussian splatting. 2024. 2
2024
-
[23]
4d gaussian splatting for real-time dynamic scene render- ing
Guanjun Wu, Taoran Yi, Jiemin Fang, Lingxi Xie, Xiaopeng Zhang, Wei Wei, Wenyu Liu, Qi Tian, and Xinggang Wang. 4d gaussian splatting for real-time dynamic scene render- ing. InProceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition (CVPR), pages 20310– 20320, 2024. 2
2024
-
[24]
PhysGaussian: Physics-integrated 3d gaussians for generative dynamics
Tianyi Xie, Zeshun Zong, Yuxing Qiu, Xuan Li, Yutao Feng, Yin Yang, and Chenfanfu Jiang. Physgaussian: Physics- integrated 3d gaussians for generative dynamics.arXiv preprint arXiv:2311.12198, 2023. 2
-
[25]
Deformable 3d gaussians for high- fidelity monocular dynamic scene reconstruction,
Ziyi Yang, Xinyu Gao, Wen Zhou, Shaohui Jiao, Yuqing Zhang, and Xiaogang Jin. Deformable 3d gaussians for high-fidelity monocular dynamic scene reconstruction.arXiv preprint arXiv:2309.13101, 2023. 2
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.