Koopman operator theory: fundamentals, control, and applications
Pith reviewed 2026-07-03 08:03 UTC · model grok-4.3
The pith
Koopman operator turns nonlinear dynamics into linear representations using observable functions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The Koopman operator describes nonlinear dynamics in a linear way through the lens of real- or complex-valued observable functions, and recently proposed data-driven techniques like EDMD can generate finite-dimensional approximations accompanied by finite-data error bounds.
What carries the argument
The Koopman operator, which evolves observable functions linearly to capture the full nonlinear state evolution.
If this is right
- Finite-dimensional EDMD approximations become practical surrogate models for simulation and prediction.
- Systems with inputs admit direct extensions that preserve the linear structure for control design.
- Koopman MPC applies linear predictive control to originally nonlinear plants while retaining stability guarantees from the linear theory.
- Kernelized and machine-learning variants of EDMD improve scalability when the observable space must be learned from data.
Where Pith is reading between the lines
- The framework could be tested on high-dimensional fluid or power-system models where traditional linearization fails at large deviations.
- Error-bound results open a route to certified learning-based controllers whose guarantees do not rely on local linearization.
- Choice of observables may be automated by combining the theory with dictionary-learning algorithms that minimize the reported error bounds.
Load-bearing premise
Suitable observable functions exist that yield a useful global linear representation for the systems of interest.
What would settle it
A concrete dynamical system for which every choice of observable functions produces approximations whose error bounds grow without bound or fail to capture the dynamics on a positive-measure set.
Figures




read the original abstract
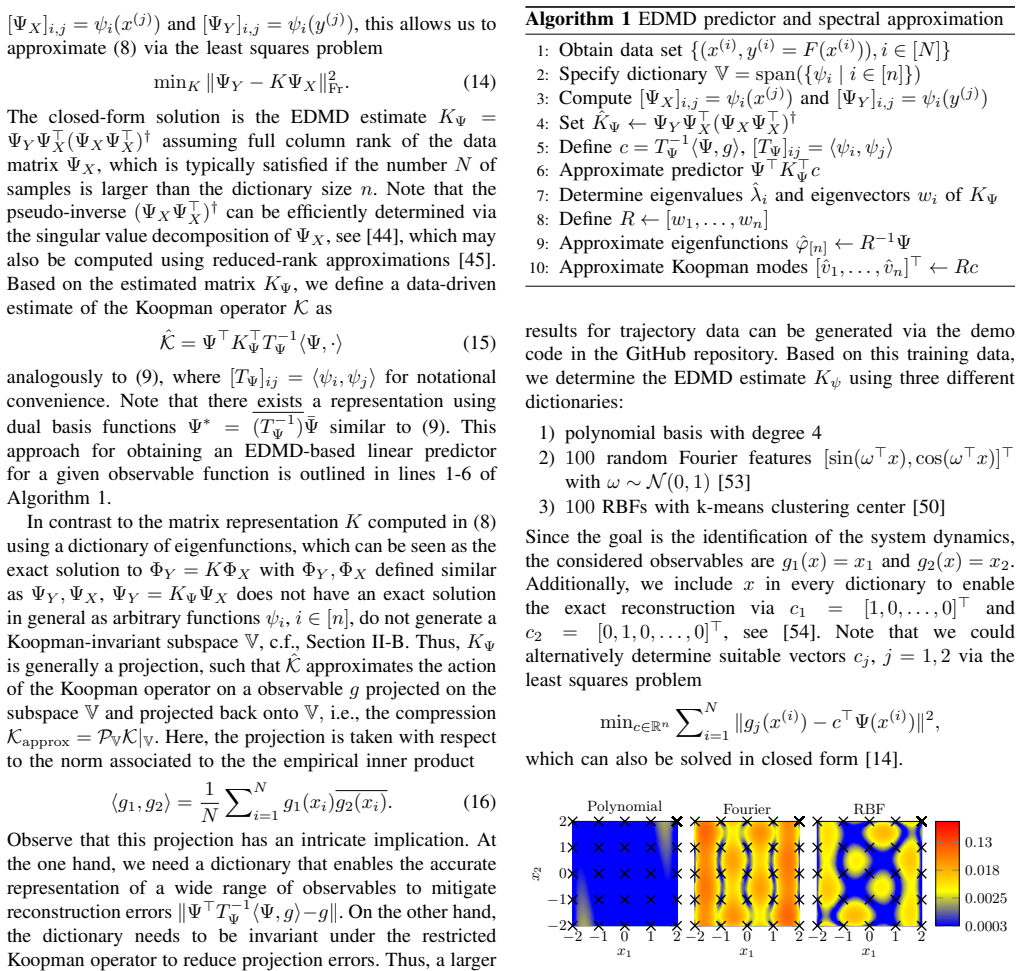
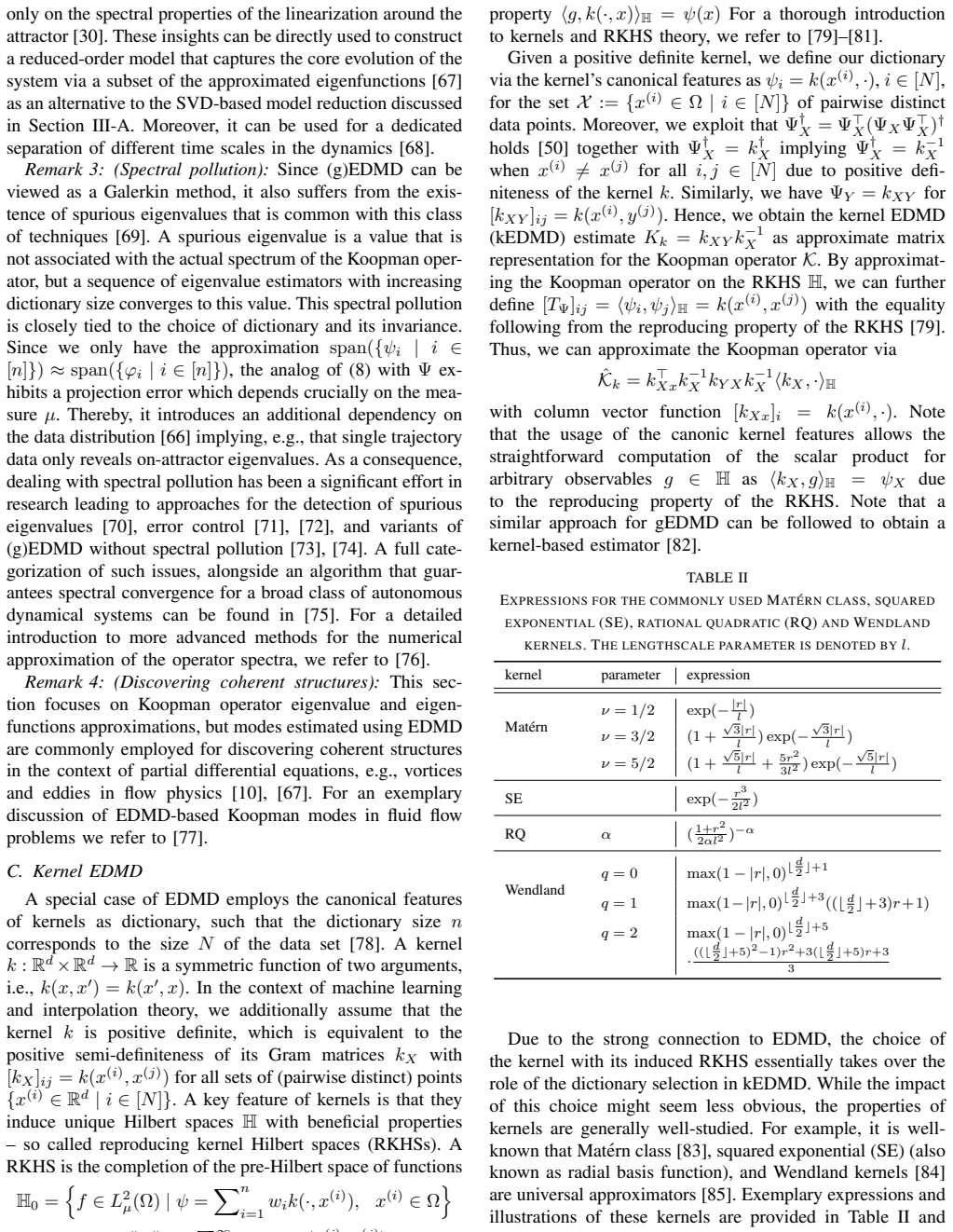
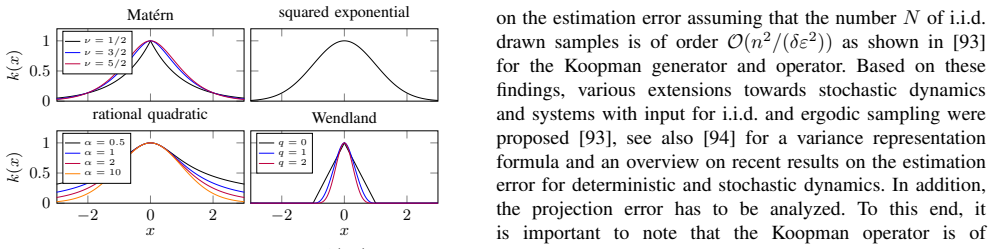
The Koopman operator has gained considerable attention due to its ability to provide a global linear representation of highly complex dynamical systems. The operator describes nonlinear dynamics in a linear way through the lens of real- or complex-valued observable functions. Recently proposed data-driven techniques, like extended dynamic mode decomposition (EDMD), its kernelized variant, and machine-learning methods, can be used to generate finite-dimensional approximations accompanied by finite-data error bounds. In this tutorial paper, we provide a concise introduction into Koopman operator theory and its use in systems and control. A particular focus is put on data-driven surrogate models, their extension to systems with inputs, and controller design using Koopman operator theory. Moreover, we demonstrate the key techniques, i.e., EDMD and Koopman MPC. To this end, we provide simulation studies including source code on GitHub to enable the interested reader to experience the Koopman operator in systems and control step by step.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript is a tutorial paper introducing Koopman operator theory for global linear representations of nonlinear dynamics via observables, data-driven finite-dimensional approximations such as EDMD (including kernelized and ML variants) with finite-data error bounds, extensions to systems with inputs, and control applications including Koopman MPC. It includes simulation studies and GitHub source code for step-by-step demonstration.
Significance. As a tutorial, the work has value in consolidating established Koopman methods for the systems and control audience and in providing reproducible simulation examples with code; this supports accessibility and adoption without advancing new theorems or empirical claims.
minor comments (2)
- [Abstract] Abstract: the phrasing 'recently proposed data-driven techniques... can be used to generate... accompanied by finite-data error bounds' could more clearly attribute the error-bound results to the cited literature rather than the tutorial itself.
- The manuscript would benefit from an explicit statement early in the introduction that it is an expository tutorial rather than a research contribution.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript as a tutorial consolidating Koopman methods with reproducible examples and code, and for the recommendation to accept. The referee's summary accurately reflects the paper's scope and contributions. There are no major comments to address.
Circularity Check
Tutorial paper with no novel derivations or fitted results
full rationale
The paper is explicitly a tutorial providing a concise introduction to established Koopman operator theory, EDMD, and related control methods, along with demonstrations and open-source simulations. No new derivation chain, parameter fitting, or predictive claim is advanced that could reduce to its own inputs by construction. All referenced results (operator properties, finite-data error bounds) are attributed to prior literature without self-citation load-bearing on novel content. The central purpose is exposition rather than advancement of a theorem or empirical result, making the derivation chain self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Isidori,Nonlinear Control Systems: An Introduction
A. Isidori,Nonlinear Control Systems: An Introduction. Springer, 1985
1985
-
[2]
Krstic, P
M. Krstic, P. V . Kokotovic, and I. Kanellakopoulos,Nonlinear and Adaptive Control Design. John Wiley & Sons, Inc., 1995
1995
-
[3]
H. K. Khalil and J. W. Grizzle,Nonlinear Systems, vol. 3. Prentice Hall Upper Saddle River, NJ, 2002
2002
-
[4]
Blanchini and S
F. Blanchini and S. Miani,Set-Theoretic Methods in Control, vol. 78. Springer, 2008
2008
-
[5]
A Koopman Operator-based Prediction Algorithm and its Application to COVID- 19 Pandemic and Influenza Cases,
I. Mezi ´c, Z. Drma ˇc, N. ˇCrnjari´c, S. Ma ´ceˇsi´c, M. Fonoberova, R. Mohr, A. M. Avila, I. Manojlovi´c, and A. Andrejˇcuk, “A Koopman Operator-based Prediction Algorithm and its Application to COVID- 19 Pandemic and Influenza Cases,”Scientific reports, vol. 14, no. 1, p. 5788, 2024
2024
-
[6]
A Tour of Reinforcement Learning: The View from Continuous Control,
B. Recht, “A Tour of Reinforcement Learning: The View from Continuous Control,”Annual Review of Control, Robotics, and Au- tonomous Systems, vol. 2, no. 1, pp. 253–279, 2019
2019
-
[7]
Analysis of Gain Scheduled Control for Nonlinear Plants,
J. S. Shamma and M. Athans, “Analysis of Gain Scheduled Control for Nonlinear Plants,”IEEE Transactions on Automatic Control, vol. 35, no. 8, pp. 898–907, 2002
2002
-
[8]
Comparison of Systems with Complex Behavior,
I. Mezi ´c and A. Banaszuk, “Comparison of Systems with Complex Behavior,”Physica D: Nonlinear Phenomena, vol. 197, no. 1–2, pp. 101–133, 2004
2004
-
[9]
Spectral Properties of Dynamical Systems, Model Reduc- tion and Decompositions,
I. Mezi ´c, “Spectral Properties of Dynamical Systems, Model Reduc- tion and Decompositions,”Nonlinear Dynamics, vol. 41, pp. 309– 325, 2005
2005
-
[10]
Spectral Analysis of Nonlinear Flows,
C. W. Rowley, I. Mezi ´c, S. Bagheri, P. Schlatter, and D. S. Hen- ningson, “Spectral Analysis of Nonlinear Flows,”Journal of Fluid Mechanics, vol. 641, pp. 115–127, 2009
2009
-
[11]
An Overview of Koopman-based Control: From Error Bounds to Closed-Loop Guarantees,
R. Str ¨asser, K. Worthmann, I. Mezi ´c, J. Berberich, M. Schaller, and F. Allg¨ower, “An Overview of Koopman-based Control: From Error Bounds to Closed-Loop Guarantees,”Annual Reviews in Control, vol. 61:101035, 2026
2026
-
[12]
Global Stability Analysis using the Eigenfunctions of the Koopman Operator,
A. Mauroy and I. Mezi ´c, “Global Stability Analysis using the Eigenfunctions of the Koopman Operator,”IEEE Transactions on Automatic Control, vol. 61, no. 11, pp. 3356–3369, 2016
2016
-
[13]
Koopman Kernel Regression,
P. Bevanda, M. Beier, A. Lederer, S. Sosnowski, E. H ¨ullermeier, and S. Hirche, “Koopman Kernel Regression,”Advances in Neural Information Processing Systems, vol. 36, pp. 16207–16221, 2023
2023
-
[14]
Koopman Operator Dynamical Models: Learning, Analysis and Control,
P. Bevanda, S. Sosnowski, and S. Hirche, “Koopman Operator Dynamical Models: Learning, Analysis and Control,”Annual Reviews in Control, vol. 52, pp. 197–212, 2021
2021
-
[15]
Modern Koopman Theory for Dynamical Systems,
S. L. Brunton, M. Budi ˇsi´c, E. Kaiser, and J. N. Kutz, “Modern Koopman Theory for Dynamical Systems,”SIAM Review, 2022
2022
-
[16]
Mauroy, Y
A. Mauroy, Y . Susuki, and I. Mezi ´c,Koopman Operator in Systems and Control, vol. 484. Springer, 2020
2020
-
[17]
SafEDMD: A Koopman-based Data-Driven Controller Design Framework for Nonlinear Dynamical Systems,
R. Str ¨asser, M. Schaller, K. Worthmann, J. Berberich, and F. Allg¨ower, “SafEDMD: A Koopman-based Data-Driven Controller Design Framework for Nonlinear Dynamical Systems,”Automatica, vol. 185:112732, 2026
2026
-
[18]
Koopman Operators in Robot Learning,
L. Shi, M. Haseli, G. Mamakoukas, D. Bruder, I. Abraham, T. Mur- phey, J. Cort ´es, and K. Karydis, “Koopman Operators in Robot Learning,”IEEE Transactions on Robotics, 2026
2026
-
[19]
L∞-Error Bounds for Approximations of the Koopman Operator by Kernel Extended Dynamic Mode Decomposition,
F. K ¨ohne, F. M. Philipp, M. Schaller, A. Schiela, and K. Worthmann, “L∞-Error Bounds for Approximations of the Koopman Operator by Kernel Extended Dynamic Mode Decomposition,”SIAM Journal on Applied Dynamical Systems, vol. 24, no. 1, pp. 501–529, 2025
2025
-
[20]
Bernard Osgood Koopman, 1900–1981,
P. M. Morse, “Bernard Osgood Koopman, 1900–1981,”Operations Research, vol. 30, no. 3, pp. 417–427, 1982
1900
-
[21]
Hamiltonian Systems and Transformation in Hilbert Space,
B. O. Koopman, “Hamiltonian Systems and Transformation in Hilbert Space,”Proc. National Academy of Sciences, vol. 17, no. 5, pp. 315– 318, 1931
1931
-
[22]
Dynamical Systems of Contin- uous Spectra,
B. O. Koopman and J. v. Neumann, “Dynamical Systems of Contin- uous Spectra,”Proc. National Academy of Sciences, vol. 18, no. 3, pp. 255–263, 1932
1932
-
[23]
Comparison of Systems with Complex Behavior: Spectral Methods,
I. Mezi ´c and A. Banaszuk, “Comparison of Systems with Complex Behavior: Spectral Methods,” inProc. IEEE Conf. on Decision and Control, vol. 2, pp. 1224–1231, 2000
2000
-
[24]
Koopman Operator Spectrum for Random Dynamical Systems,
N. ˇCrnjari´c- ˇZic, S. Ma ´ceˇsi´c, and I. Mezi ´c, “Koopman Operator Spectrum for Random Dynamical Systems,”Journal of Nonlinear Science, vol. 30, no. 5, pp. 2007–2056, 2020
2007
-
[25]
On Robust Computation of Koopman Operator and Prediction in Random Dynamical Systems,
S. Sinha, B. Huang, and U. Vaidya, “On Robust Computation of Koopman Operator and Prediction in Random Dynamical Systems,” Journal of Nonlinear Science, vol. 30, no. 5, pp. 2057–2090, 2020
2057
-
[26]
Robust Approximation of the Stochastic Koopman Operator,
M. Wanner and I. Mezi ´c, “Robust Approximation of the Stochastic Koopman Operator,”SIAM Journal on Applied Dynamical Systems, vol. 21, no. 3, pp. 1930–1951, 2022
1930
-
[27]
Koopman for stochastic dynamics: error bounds for kernel extended dynamic mode decomposition
M. Hertel, F. M. Philipp, M. Schaller, and K. Worthmann, “Koopman for Stochastic Dynamics: Error Bounds for Kernel Extended Dy- namic Mode Decomposition,”SIAM Journal on Applied Dynamical Systems, to appear, ArXiv preprint arXiv:2512.20247, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[28]
Variational Koopman Models: Slow Collective Variables and Molecular Kinetics from Short Off-Equilibrium Simulations,
H. Wu, F. N ¨uske, F. Paul, S. Klus, P. Koltai, and F. No´e, “Variational Koopman Models: Slow Collective Variables and Molecular Kinetics from Short Off-Equilibrium Simulations,”The Journal of Chemical Physics, vol. 146, no. 15, 2017
2017
-
[29]
Data- Driven Characterization and Acceleration of Metastable Dynamics Using Koopman Operators,
J. Luzzatto, F. N ¨uske, N. G. Hadjiconstantinou, and D. Perez, “Data- Driven Characterization and Acceleration of Metastable Dynamics Using Koopman Operators,”Journal of Chemical Theory and Com- putation, 2026
2026
-
[30]
Spectrum of the Koopman Operator, Spectral Expansions in Functional Spaces, and State-Space Geometry.,
I. Mezi ´c, “Spectrum of the Koopman Operator, Spectral Expansions in Functional Spaces, and State-Space Geometry.,”Journal of Non- linear Science, vol. 30, no. 5, p. 2091, 2020
2091
-
[31]
Yosida,Functional Analysis
K. Yosida,Functional Analysis. Springer Science & Business Media, 2012
2012
-
[32]
Mezi ´c,Koopman Operators: Spectra, Function Spaces, and Rep- resentations, pp
I. Mezi ´c,Koopman Operators: Spectra, Function Spaces, and Rep- resentations, pp. 1–67. Basel: Springer Basel, 2016
2016
-
[33]
Koopman Framework for Global Stability Analysis,
A. Mauroy, A. Sootla, and I. Mezi ´c, “Koopman Framework for Global Stability Analysis,” inThe Koopman Operator in Systems and Control: Concepts, Methodologies, and Applications, pp. 35–58, Springer, 2020
2020
-
[34]
A Spectral Operator-Theoretic Framework for Global Stability,
A. Mauroy and I. Mezi ´c, “A Spectral Operator-Theoretic Framework for Global Stability,” inProc. IEEE Conf. Decision and Control, pp. 5234–5239, 2013
2013
-
[35]
Modeling Nonlinear Control Systems via Koopman Control Family: Universal Forms and Subspace Invariance Proximity,
M. Haseli and J. Cort ´es, “Modeling Nonlinear Control Systems via Koopman Control Family: Universal Forms and Subspace Invariance Proximity,”Automatica, vol. 185:112722, 2026
2026
-
[36]
Invariance Proximity: Closed-Form Er- ror Bounds for Finite-Dimensional Koopman-Based Models,
M. Haseli and J. Cort ´es, “Invariance Proximity: Closed-Form Er- ror Bounds for Finite-Dimensional Koopman-Based Models,”arXiv preprint arXiv:2311.13033, 2024
-
[37]
Essai sur la g ´eom´etrie `andimensions,
C. Jordan, “Essai sur la g ´eom´etrie `andimensions,”Bulletin de la Soci´et´e math ´ematique de France, vol. 3, pp. 103–174, 1875
-
[38]
Relations between Two Sets of Variates,
H. Hotelling, “Relations between Two Sets of Variates,” inBreak- throughs in Statistics: Methodology and Distribution, pp. 162–190, New York, NY: Springer, 1992
1992
-
[39]
Repro- jection Methods for Koopman-based Modelling and Prediction,
P. Van Goor, R. Mahony, M. Schaller, and K. Worthmann, “Repro- jection Methods for Koopman-based Modelling and Prediction,” in Proc. IEEE Conf. Decision and Control, pp. 315–321, 2023
2023
-
[40]
J. M. Lee,Introduction to Smooth Manifolds. Springer, 2012
2012
-
[41]
Koopman-based Lifting Techniques for Nonlinear Systems Identification,
A. Mauroy and J. Goncalves, “Koopman-based Lifting Techniques for Nonlinear Systems Identification,”IEEE Transactions on Auto- matic Control, vol. 65, no. 6, pp. 2550–2565, 2019
2019
-
[42]
P. van Goor, R. Mahony, M. Schaller, and K. Worthmann, “Maximum-likelihood reprojections for reliable koopman-based pre- dictions and bifurcation analysis of parametric dynamical systems,” arXiv preprint arXiv:2506.17817, 2025
-
[43]
The Multiverse of Dynamic Mode Decomposition Algorithms,
M. J. Colbrook, “The Multiverse of Dynamic Mode Decomposition Algorithms,” inHandbook of Numerical Analysis, vol. 25, pp. 127– 230, Elsevier, 2024
2024
-
[44]
On Dynamic Mode Decomposition: Theory and Applications,
J. H. Tu, C. W. Rowley, D. M. Luchtenburg, S. L. Brunton, and J. N. Kutz, “On Dynamic Mode Decomposition: Theory and Applications,” Journal of Computational Dynamics, vol. 1, no. 2, pp. 391–421, 2014
2014
-
[45]
Model Reduction for Flow Analysis and Control,
C. W. Rowley and S. T. Dawson, “Model Reduction for Flow Analysis and Control,”Annual Review of Fluid Mechanics, vol. 49, pp. 387–417, 2017
2017
-
[46]
Generalizing Dynamic Mode Decomposi- tion: Balancing Accuracy and Expressiveness in Koopman Approxi- mations,
M. Haseli and J. Cort ´es, “Generalizing Dynamic Mode Decomposi- tion: Balancing Accuracy and Expressiveness in Koopman Approxi- mations,”Automatica, vol. 153, p. 111001, 2023
2023
-
[47]
Recursive Forward-Backward EDMD: Guaranteed Algebraic Search for Koopman Invariant Subspaces,
M. Haseli and J. Cort ´es, “Recursive Forward-Backward EDMD: Guaranteed Algebraic Search for Koopman Invariant Subspaces,” IEEE Access, vol. 13, pp. 61006–61025, 2025
2025
-
[48]
Scalable Extended Dynamic Mode Decomposition Using Random Kernel Approximation,
A. M. DeGennaro and N. M. Urban, “Scalable Extended Dynamic Mode Decomposition Using Random Kernel Approximation,”SIAM Journal on Scientific Computing, vol. 41, no. 3, pp. A1482–a1499, 2019
2019
-
[49]
Orthogonal Polynomial Approximation and Extended Dynamic Mode Decomposition in Chaos,
C. Wormell, “Orthogonal Polynomial Approximation and Extended Dynamic Mode Decomposition in Chaos,”SIAM Journal on Numer- ical Analysis, vol. 63, no. 1, pp. 122–148, 2025
2025
-
[50]
A Data– Driven Approximation of the Koopman Operator: Extending Dy- namic Mode Decomposition,
M. O. Williams, I. G. Kevrekidis, and C. W. Rowley, “A Data– Driven Approximation of the Koopman Operator: Extending Dy- namic Mode Decomposition,”Journal of Nonlinear Science, vol. 25, no. 6, pp. 1307–1346, 2015
2015
-
[51]
Extended Dynamic Mode Decomposition with Dictionary Learning: A Data- Driven Adaptive Spectral Decomposition of the Koopman Operator,
Q. Li, F. Dietrich, E. M. Bollt, and I. G. Kevrekidis, “Extended Dynamic Mode Decomposition with Dictionary Learning: A Data- Driven Adaptive Spectral Decomposition of the Koopman Operator,” Chaos: An Interdisciplinary Journal of Nonlinear Science, vol. 27, no. 10, 2017
2017
-
[52]
Deep Learning for Universal Linear Embeddings of Nonlinear Dynamics,
B. Lusch, J. N. Kutz, and S. L. Brunton, “Deep Learning for Universal Linear Embeddings of Nonlinear Dynamics,”Nature com- munications, vol. 9, no. 1, p. 4950, 2018
2018
-
[53]
Random Features for Large-Scale Kernel Machines,
A. Rahimi and B. Recht, “Random Features for Large-Scale Kernel Machines,” inAdvances in Neural Information Processing Systems, vol. 20, 2007
2007
-
[54]
Koopman Operator Framework for Spectral Analysis and Identification of Infinite-Dimensional Systems,
A. Mauroy, “Koopman Operator Framework for Spectral Analysis and Identification of Infinite-Dimensional Systems,”Mathematics, vol. 9, no. 19, 2021
2021
-
[55]
Temporal Forward–Backward Consistency, Not Residual Error, Measures the Prediction Accuracy of Extended Dynamic Mode Decomposition,
M. Haseli and J. Cort ´es, “Temporal Forward–Backward Consistency, Not Residual Error, Measures the Prediction Accuracy of Extended Dynamic Mode Decomposition,”IEEE Control Systems Letters, vol. 7, pp. 649–654, 2023
2023
-
[56]
Data-Driven Approximation of the Koopman Generator: Model Reduction, System Identification, and Control,
S. Klus, F. N ¨uske, S. Peitz, J.-H. Niemann, C. Clementi, and C. Sch¨utte, “Data-Driven Approximation of the Koopman Generator: Model Reduction, System Identification, and Control,”Physica D: Nonlinear Phenomena, vol. 406, p. 132416, 2020
2020
-
[57]
Linear Identification of Nonlinear Systems: A Lifting Technique based on the Koopman Operator,
A. Mauroy and J. Goncalves, “Linear Identification of Nonlinear Systems: A Lifting Technique based on the Koopman Operator,” in Proc. IEEE Conf. Decision and Control, pp. 6500–6505, 2016
2016
-
[58]
J. P. Boyd,Chebyshev and Fourier Spectral Methods. Courier Dover Publications, 2013
2013
-
[59]
On Convergence of Extended Dynamic Mode Decomposition to the Koopman Operator,
M. Korda and I. Mezi ´c, “On Convergence of Extended Dynamic Mode Decomposition to the Koopman Operator,”Journal of Nonlin- ear Science, vol. 28, no. 2, pp. 687–710, 2018
2018
-
[60]
Applied Koopman Theory for Partial Differential Equations and Data-Driven Mod- eling of Spatio-Temporal Systems,
J. Nathan Kutz, J. L. Proctor, and S. L. Brunton, “Applied Koopman Theory for Partial Differential Equations and Data-Driven Mod- eling of Spatio-Temporal Systems,”Complexity, vol. 2018, no. 1, p. 6010634, 2018
2018
-
[61]
Ergodic Theory, Dynamic Mode Decom- position, and Computation of Spectral Properties of the Koopman Operator,
H. Arbabi and I. Mezi ´c, “Ergodic Theory, Dynamic Mode Decom- position, and Computation of Spectral Properties of the Koopman Operator,”SIAM Journal on Applied Dynamical Systems, vol. 16, no. 4, pp. 2096–2126, 2017
2096
-
[62]
Time-Delay Observables for Koopman: Theory and Applications,
M. Kamb, E. Kaiser, S. L. Brunton, and J. N. Kutz, “Time-Delay Observables for Koopman: Theory and Applications,”SIAM Journal on Applied Dynamical Systems, vol. 19, no. 2, pp. 886–917, 2020
2020
-
[63]
The Takens Embedding Theorem,
L. Noakes, “The Takens Embedding Theorem,”Int. Journal of Bifurcation and Chaos, vol. 1, no. 04, pp. 867–872, 1991
1991
-
[64]
Isostables, Isochrons, and Koopman Spectrum for the Action–Angle Representation of Stable Fixed Point Dynamics,
A. Mauroy, I. Mezi ´c, and J. Moehlis, “Isostables, Isochrons, and Koopman Spectrum for the Action–Angle Representation of Stable Fixed Point Dynamics,”Physica D: Nonlinear Phenomena, vol. 261, pp. 19–30, 2013
2013
-
[65]
R. Mohr and I. Mezi ´c, “Construction of Eigenfunctions for Scalar- Type Operators via Laplace Averages with Connections to the Koop- man Operator,”arXiv preprint arXiv:1403.6559, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[66]
On Numerical Approximations of the Koopman Operator,
I. Mezi ´c, “On Numerical Approximations of the Koopman Operator,” Mathematics, vol. 10, no. 7:1180, 2022
2022
-
[67]
Variants of Dynamic Mode De- composition: Boundary Condition, Koopman, and Fourier Analyses,
K. Chen, J. Tu, and C. Rowley, “Variants of Dynamic Mode De- composition: Boundary Condition, Koopman, and Fourier Analyses,” Journal of Nonlinear Science, vol. 22, no. 6, pp. 887–915, 2012
2012
-
[68]
A Computational Method to Extract Macroscopic Variables and Their Dynamics in Multiscale Systems,
G. Froyland, G. A. Gottwald, and A. Hammerlindl, “A Computational Method to Extract Macroscopic Variables and Their Dynamics in Multiscale Systems,”SIAM Journal on Applied Dynamical Systems, vol. 13, no. 4, pp. 1816–1846, 2014
2014
-
[69]
Spectral Pollution and How to Avoid It,
M. Lewin and ´E. S ´er´e, “Spectral Pollution and How to Avoid It,” Proc. London Mathematical Society, vol. 100, no. 3, pp. 864–900, 2010
2010
-
[70]
Spectral Pollution and Second- Order Relative Spectra for Self-Adjoint Operators,
M. Levitin and E. Shargorodsky, “Spectral Pollution and Second- Order Relative Spectra for Self-Adjoint Operators,”IMA Journal of Numerical Analysis, vol. 24, no. 3, pp. 393–416, 2004
2004
-
[71]
How to Compute Spectra with Error Control,
M. J. Colbrook, B. Roman, and A. C. Hansen, “How to Compute Spectra with Error Control,”Physical Review Letters, vol. 122, no. 25:250201, 2019
2019
-
[72]
Rigorous Data-Driven Computa- tion of Spectral Properties of Koopman Operators for Dynamical Sys- tems,
M. J. Colbrook and A. Townsend, “Rigorous Data-Driven Computa- tion of Spectral Properties of Koopman Operators for Dynamical Sys- tems,”Communications on Pure and Applied Mathematics, vol. 77, no. 1, pp. 221–283, 2024
2024
-
[73]
Data Driven Modal Decom- positions: Analysis and Enhancements,
Z. Drma ˇc, I. Mezi ´c, and R. Mohr, “Data Driven Modal Decom- positions: Analysis and Enhancements,”SIAM Journal on Scientific Computing, vol. 40, no. 4, pp. A2253–a2285, 2018
2018
-
[74]
Analytic Extended Dynamic Mode Decomposition,
A. Mauroy and I. Mezi ´c’, “Analytic Extended Dynamic Mode Decomposition,”arXiv preprint arXiv:2405.15945, 2024
-
[75]
Adversarial Dynam- ical Systems Characterize when Data-Driven Learning Succeeds or Fails,
M. J. Colbrook, I. Mezi ´c, and A. Stepanenko, “Adversarial Dynam- ical Systems Characterize when Data-Driven Learning Succeeds or Fails,”Accepted to Nature Communications, 2026
2026
-
[76]
M. J. Colbrook,Infinite-Dimensional Spectral Computations: Foun- dations, Algorithms, and Modern Applications. Cambridge University Press, 2026
2026
-
[77]
Analysis of Fluid Flows via Spectral Properties of the Koopman Operator,
I. Mezi ´c, “Analysis of Fluid Flows via Spectral Properties of the Koopman Operator,”Annual Review of Fluid Mechanics, vol. 45, no. 1, pp. 357–378, 2013
2013
-
[78]
A Kernel- Based Method for Data-Driven Koopman Spectral Analysis,
M. O. Williams, C. W. Rowley, and I. G. Kevrekidis, “A Kernel- Based Method for Data-Driven Koopman Spectral Analysis,”Journal of Computational Dynamics, vol. 2, no. 2, pp. 247–265, 2016
2016
-
[79]
Sch ¨olkopf and A
B. Sch ¨olkopf and A. J. Smola,Learning with Kernels: Support Vector Machines, Regularization, Optimization, and Beyond. The MIT Press, 2002
2002
-
[80]
Berlinet and C
A. Berlinet and C. Thomas-Agnan,Reproducing Kernel Hilbert Spaces in Probability and Statistics. Springer Science & Business Media, 2011
2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.