REVIEW 3 major objections 4 minor 1 cited by
Fixed execution horizons are unreliable for action-chunking robots; a training-free rule that replans at motion valleys lifts success from 57.8% to 64.2% in simulation and from 50.7% to 70.4% on real robots.
Reviewed by Pith at T0; open to challenge. T0 means a machine referee read the full paper against a public rubric. the ladder, T0–T4 →
T0 review · deepseek-v4-flash
2026-08-02 12:40 UTC pith:SKBGTECH
load-bearing objection PACE is a genuinely useful execution-time idea with a strong evaluation, but the headline gain over fixed horizons is partially confounded by per-task threshold calibration. the 3 major comments →
PACE: Phase-Aware Chunk Execution for Robot Policies with Action Chunking
The pith
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
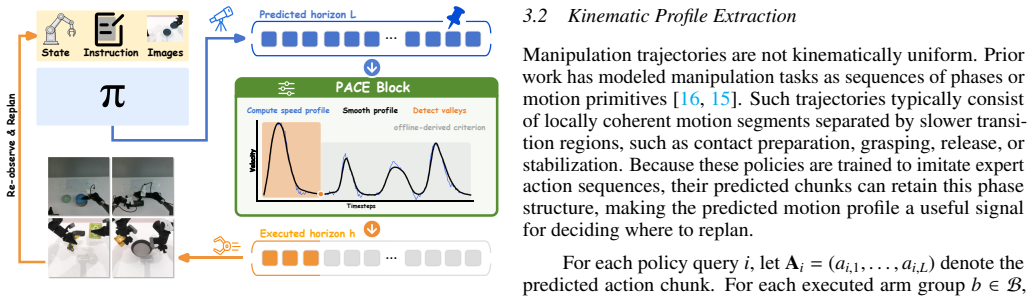
The central claim is that the execution horizon should be selected per chunk from the predicted chunk's own kinematic structure rather than fixed globally. PACE constructs a speed profile for each executed arm from the predicted actions, smooths it, detects prominent low-speed valleys as candidate phase boundaries, and executes the prefix up to the earliest accepted valley—or up to a maximum horizon if no valley passes the acceptance threshold. Manipulation trajectories are not kinematically uniform: they consist of coherent motion segments separated by deceleration events such as contact preparation, grasping, release, or alignment, and imitation-learned policies preserve this structure in
What carries the argument
The central object is the predicted action chunk's speed profile: PACE maps each arm's predicted actions to a one-dimensional speed sequence, smooths it to suppress spurious fluctuations, and treats prominent low-speed valleys as candidate replanning boundaries. Candidate valleys from all executed arms are pooled, those whose prominence exceeds a threshold calibrated once from training demonstrations are accepted, and the chunk is executed up to the earliest accepted valley. This mechanism carries the argument because it converts a content-blind constant horizon into a chunk-conditioned online choice, and the matched-horizon results show that timing—not average query frequency—is what improv
Load-bearing premise
The method assumes that every useful replanning boundary shows up as a low-speed valley in the predicted speed profile; if a task's key decision points occur during fast motion, or the policy's predictions are too noisy for valleys to be detected, PACE has no signal to act on.
What would settle it
Run PACE on a task whose demonstrations contain no deceleration before the critical decision—for example, a continuous sweeping or stirring motion where the decisive event occurs at peak speed—and compare it against a fixed horizon matched to PACE's average execution length. If PACE does not beat the matched fixed schedule in that regime, the claim that low-speed valleys mark useful replanning boundaries is falsified for fast-decision tasks.
If this is right
- PACE can be added to any already-trained action-chunking policy with no retraining, no auxiliary heads, and no access to internal attention, confidence, or denoising signals.
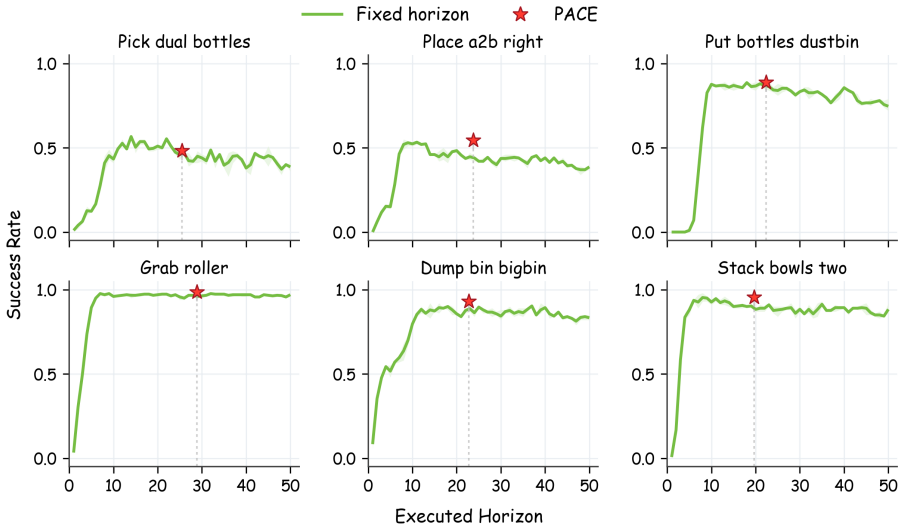
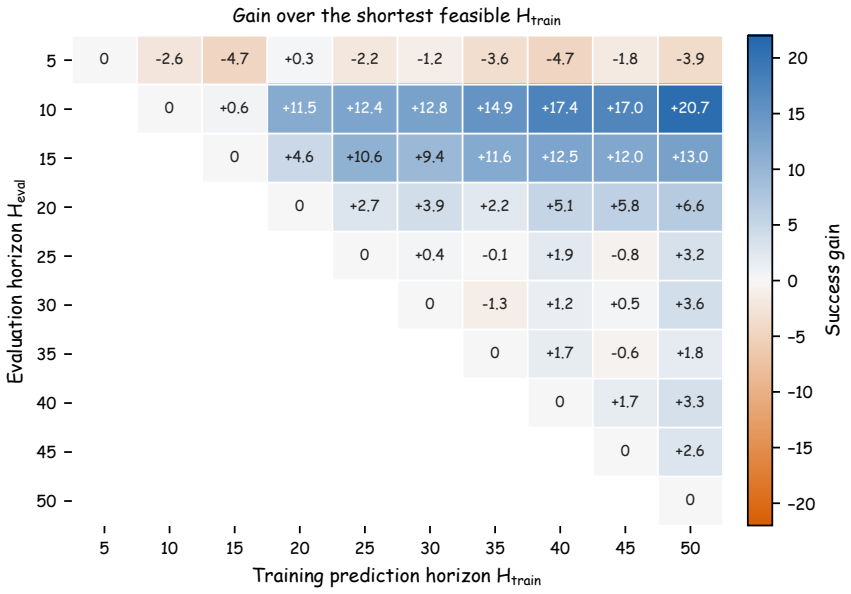
- Fixed execution horizons are not transferable: the best horizon differs by task and varies non-monotonically within a task, so deployment-time rules are necessary rather than a convenience.
- The gains come from where replanning happens, not from querying more often: PACE outperforms a fixed schedule matched to the same average execution length on all six representative tasks compared.
- Longer training prediction horizons improve the executed prefix even when the unexecuted suffix is discarded, so the benefits of chunk length and execution rule compound.
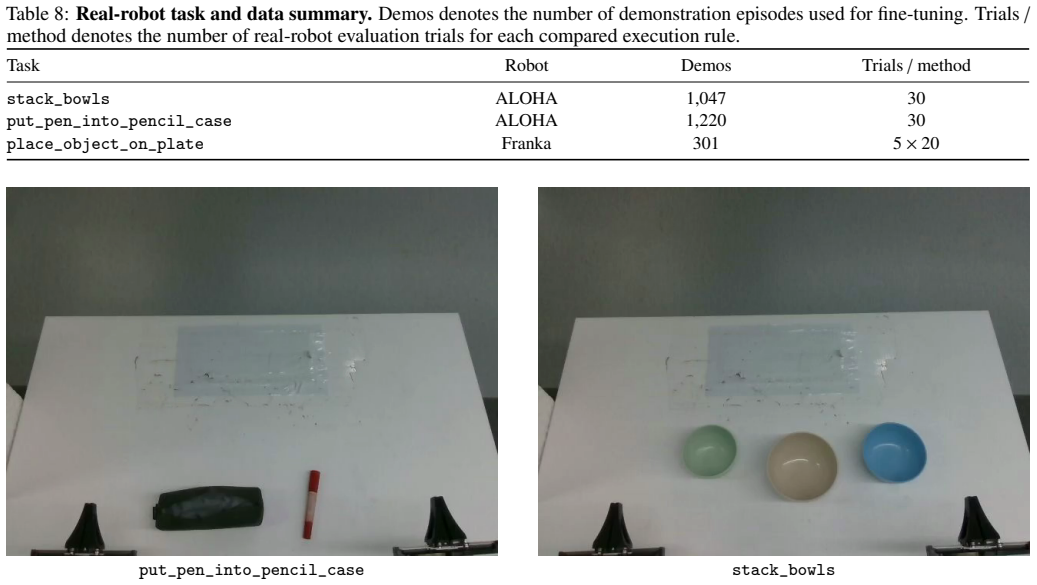
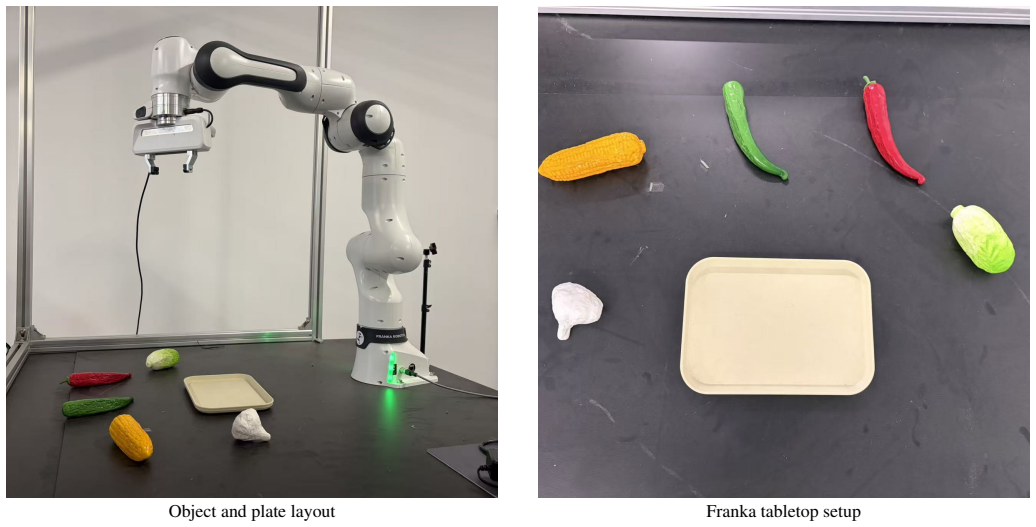
- Real-robot deployment improves under the same rule on both bimanual and single-arm platforms, suggesting the mechanism is not specific to one robot morphology.
Where Pith is reading between the lines
- Extension: because PACE only reads the predicted action sequence, it should transfer to any chunk-generating policy family—action-tokenized models, world-action models, or other vision-language-action architectures—that preserves low-speed transitions; the paper evaluates one policy family, so this remains to be tested.
- Extension: the per-task threshold calibrated from training demonstrations might be replaceable by a global or few-shot-calibrated setting for tasks with similar contact structure, which would remove the remaining per-task deployment step.
- Extension: a natural combination is to override the valley rule with an uncertainty signal—when the policy is unsure, replan even earlier than the next valley—which could address tasks whose critical decisions occur at high speed rather than at decelerations.
- Extension: because PACE discards the chunk suffix, it reduces open-loop commitment; this may make rollouts more robust to sudden disturbances mid-chunk, a regime the paper's experiments do not directly stress.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper studies the execution horizon in action-chunked robot policies and proposes PACE, a test-time rule that selects, for each predicted chunk, the number of actions to execute before re-querying the policy. PACE computes a speed profile from the predicted action chunk, smooths it, detects low-speed valleys, and executes up to the earliest valley whose prominence exceeds a task-level threshold calibrated from training demonstrations; if none is accepted it executes a fallback maximum horizon. The paper reports that on 50 RoboTwin2.0 tasks with a π0.5 policy, PACE improves the average success rate from 57.8% for the best fixed global horizon to 64.2%, and in real-robot experiments improves average score from 60.7 to 77.7 and success rate from 50.7% to 70.4%. A matched-horizon diagnostic on six tasks and a real-robot rollout analysis are used to argue that the gains come from adaptive replanning timing rather than average query frequency.
Significance. If the claimed results hold, PACE is a practically valuable, plug-and-play execution layer that requires no retraining and no access to policy internals. The evaluation is unusually extensive for a test-time method: 900 episodes per task-method pair, 45,000 episodes per method for the 50-task comparison, real-robot trials on ALOHA and Franka, ablations, hyperparameter sensitivity, and a matched-horizon diagnostic. The observation that fixed execution horizons are task-dependent and non-monotonic in success is well supported and is an important deployment consideration for action-chunking policies. The main weakness is that the primary comparison does not give fixed-horizon baselines the same per-task calibration budget as PACE, and the kinematic-valley assumption is not directly validated. The paper is transparent about its limitations, including the fact that experiments use a single VLA policy family.
major comments (3)
- [Sec. 4.1/Table 1; Sec. 3.3] The primary comparison is confounded by calibration budget. PACE uses a task-level acceptance threshold δ_T calibrated from training demonstrations, while the fixed baselines in Sec. 4.1 are global constants H∈{5,25,50} not tuned per task. Since Fig. 1 shows success is task-dependent and non-monotonic in H, a per-task scalar can shift the aggregate without any online valley selection. The phrase "without task-specific horizon sweeps" does not control for this. Please add a fixed-horizon baseline that chooses H per task from training demonstrations only, using the same data and selection budget as δ_T, and report the 50-task average. Table 4 does not resolve this: it covers six tasks, uses a seed-0 fixed sweep against three-seed PACE, and matches average executed horizon, not per-task calibration budget.
- [Sec. 7; Sec. 3.2] The central kinematic assumption is acknowledged but not directly tested. PACE assumes that useful replanning boundaries are expressed as low-speed valleys in the predicted chunk, and all experiments use a single VLA family (π0.5). Since valley detection is the entire signal, I recommend a direct validation that detected valleys align with phase transitions (e.g., using demonstration segment annotations, or comparing replanning at valleys against matched non-valley points). This would also clarify whether the gains reflect the proposed mechanism or a policy-specific artifact.
- [Sec. 4.4; Table 4] The matched-horizon diagnostic uses a seed-0 fixed-horizon sweep for the fixed baseline and a three-seed full protocol for PACE, as acknowledged in Appendix D. The main text should state this asymmetry when presenting the matched-horizon gains; otherwise the reported improvements may be partly an artifact of evaluation noise. A three-seed matched fixed baseline is needed before the conclusion that adaptive replanning timing alone drives the gains is secure.
minor comments (4)
- [Sec. 3.3] H_max is not assigned a value or included in the sensitivity study; the paper should specify how it is set (presumably L=50) and whether the results are sensitive to it.
- [Abstract; throughout] The term "training-free" is slightly misleading because δ_T is calibrated from training demonstrations. Consider "without additional training" or "without retraining".
- [Table 3] Only d_min and ρ are varied in the sensitivity analysis. The smoothing width, prominence computation, and H_max are fixed; a brief statement justifying these choices would be helpful.
- [Sec. 4.1] Despite the large number of episodes, no confidence intervals or standard errors are reported. Adding them would help gauge the reliability of the 6.4-point aggregate gain.
Circularity Check
No significant circularity: PACE's central claim is empirical and self-contained; the reported gains are measured, not derived from a chain that reduces to its own inputs.
full rationale
PACE is not a derivation chain that maps inputs to predicted outcomes; it is a test-time heuristic evaluated by measured success rates. The only fitted quantity, δ_T, is calibrated from training demonstrations (Sec. 3.3), and the paper explicitly states that this calibration does not use evaluation rollouts, success labels, or fixed-horizon sweeps. The headline gain (57.8% to 64.2%) is a measured outcome, so it cannot be statistically forced by the calibration. The central kinematic assumption—that useful replanning boundaries are reflected as low-speed valleys—is a stated premise, not a conclusion derived from PACE, and the paper itself flags it as a limitation in Sec. 7. References to RoboTwin2.0, π0.5, and prior phase-segmentation work are external benchmarks or prior literature, not self-citation chains that supply the result. The per-task δ_T versus global fixed-H comparison is a legitimate experimental-fairness concern, but an unfair comparison is not circularity: no equation or fitted parameter is renamed as the output. Therefore no step meets the required standard of exhibiting an identity between an output and an input.
Axiom & Free-Parameter Ledger
free parameters (5)
- δ_T (acceptance threshold) =
not reported
- d_min (minimum valley separation) =
10 (default)
- ρ (calibration percentile) =
5 (default)
- H_max (maximum execution horizon) =
L=50
- Smoothing operator parameters =
not specified
axioms (3)
- domain assumption Predicted action chunks preserve the phase structure of expert demonstrations
- domain assumption Low-speed valleys are reliable replanning points
- domain assumption The speed profile is a sufficient statistic for phase boundaries
read the original abstract
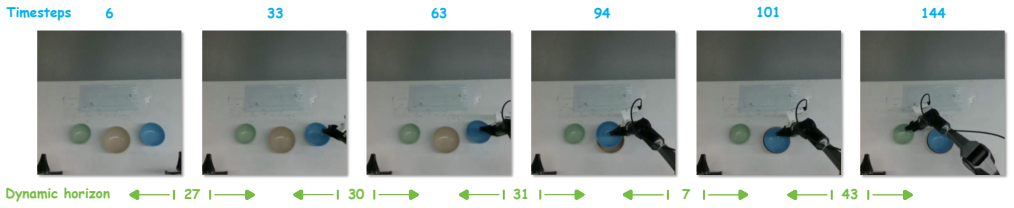
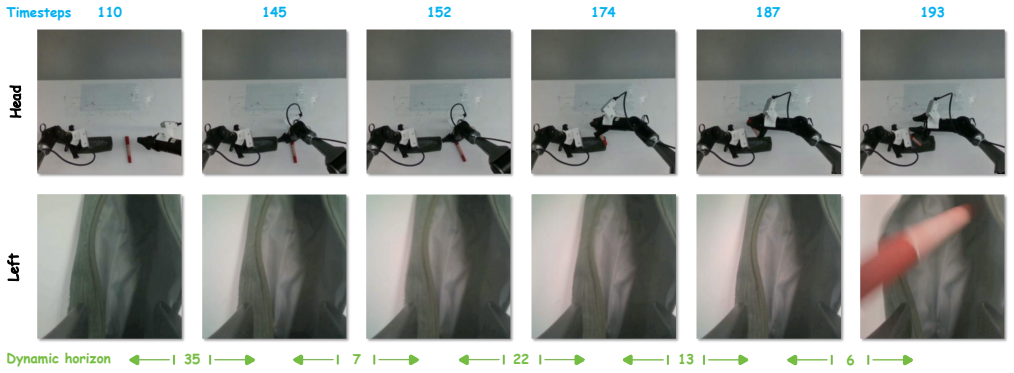
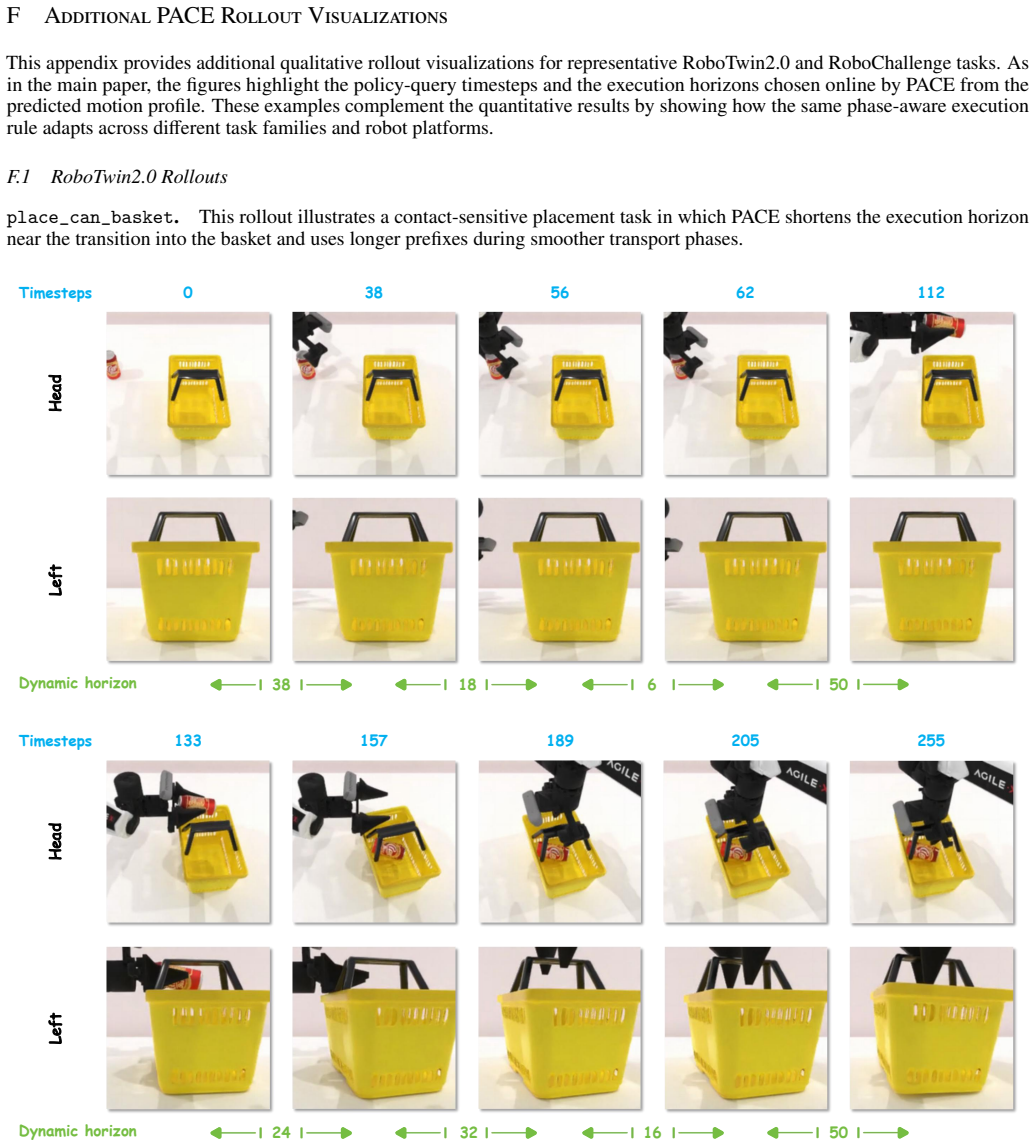
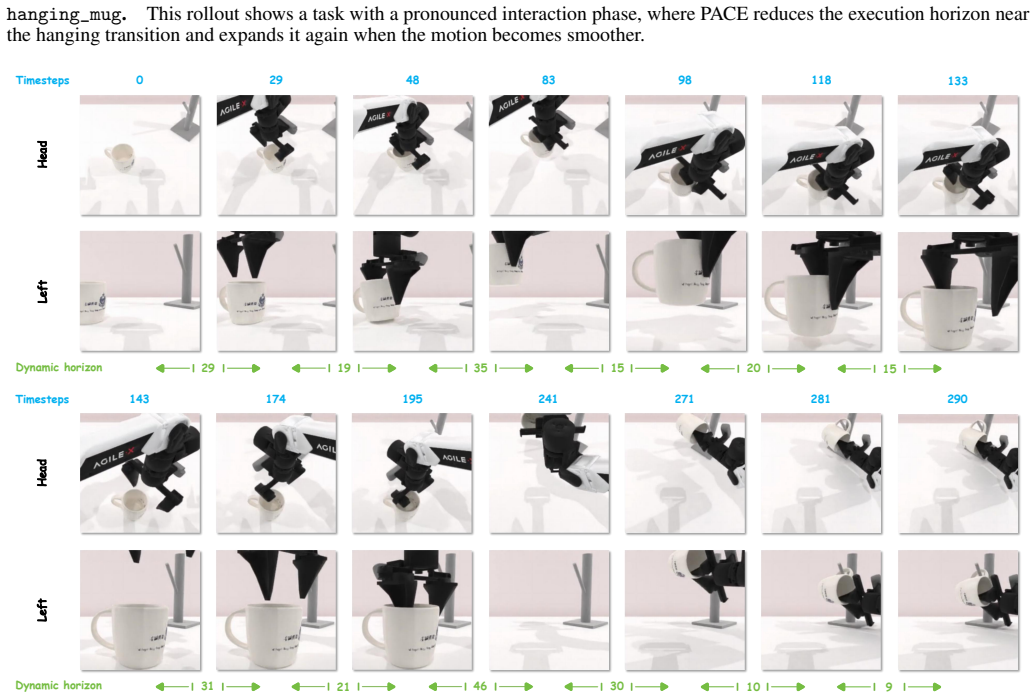
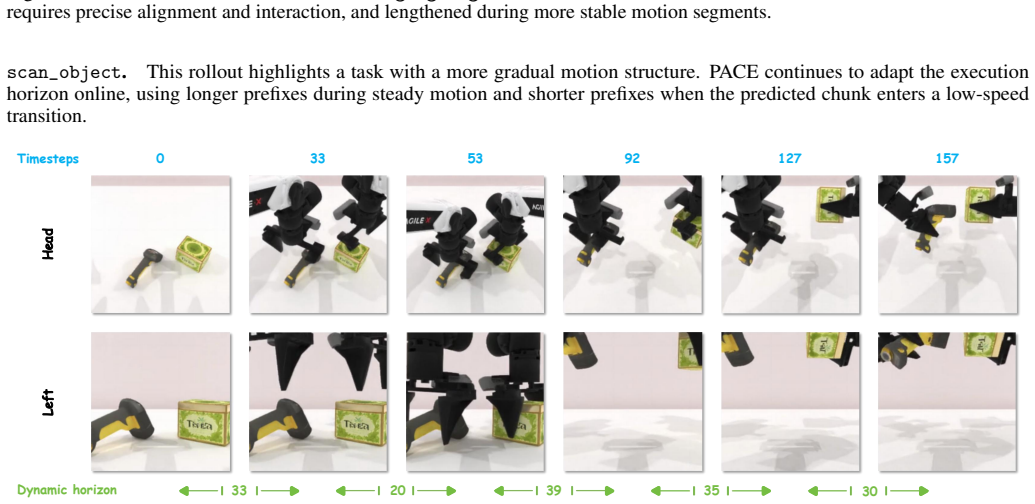
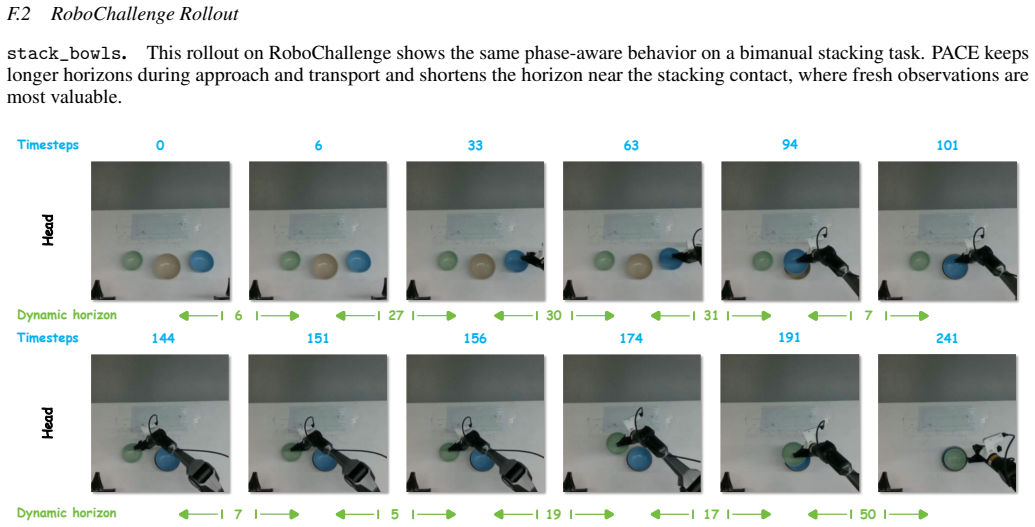
Recent vision-language-action and diffusion-based robot policies often use action chunking, where each policy query predicts a sequence of future actions and the robot executes an open-loop prefix before re-querying. While this interface improves local motion continuity, deployment still requires choosing the execution horizon: how much of each predicted chunk should be executed before acquiring a new observation. However, our experiments show that success is strongly task-dependent and non-monotonic with respect to the execution horizon, making a single constant horizon an unreliable deployment rule. We propose PACE (Phase-Aware Chunk Execution), a training-free test-time execution method that selects the execution horizon online from the predicted chunk itself. PACE exploits the phase-dependent kinematic structure of manipulation trajectories by identifying low-speed transition points in the predicted speed profile and using them as candidate replanning boundaries. Because PACE uses only the predicted action chunk, it is plug-and-play and requires no retraining or access to policy internals. We validate PACE through large-scale evaluations in both simulation and real-robot settings. On 50 RoboTwin2.0 tasks, PACE raises the average success rate from 57.8% to 64.2%. In real-robot experiments on bimanual ALOHA and single-arm Franka platforms, PACE improves the average task score from 60.7 to 77.7 and the average success rate from 50.7% to 70.4%. Ablations and rollout-level analyses show that PACE adapts execution horizons across manipulation phases, shortening near transitions while preserving longer execution during coherent motion.
Figures


Forward citations
Cited by 1 Pith paper
-
TRACT: Temporally Routed Action Chunks with Chronological Phase Authority for Contact-Rich Manipulation
Phase-aware action chunks with an intra-chunk boundary ('routing') plus a causal response-deficit integrator raised real-robot wiping success on one fixed task from 3/10 to 10/10 across ten trials per variant.
Reference graph
Works this paper leans on
-
[1]
π0: A Vision-Language-Action Flow Model for General Robot Control
Kevin Black et al. π0: A Vision-Language-Action Flow Model for General Robot Control. 2024.doi: 10.48550/ arXiv.2410.24164
-
[3]
Anthony Brohan et al.RT-1: Robotics Transformer for Real-World Control at Scale. 2022.doi: 10 . 48550 / arXiv.2212.06817
-
[4]
2023.doi:10.48550/arXiv.2307.15818
Anthony Brohan et al.RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control. 2023.doi:10.48550/arXiv.2307.15818
-
[5]
Jun Cen et al.WorldVLA: Towards Autoregressive Ac- tion World Model. 2025.doi: 10.48550/arXiv.2506. 21539
-
[6]
Tianxing Chen et al.RoboTwin 2.0: A Scalable Data Generator and Benchmark with Strong Domain Random- ization for Robust Bimanual Robotic Manipulation. 2025. doi:10.48550/arXiv.2506.18088
-
[7]
Cheng Chi et al.Diffusion Policy: Visuomotor Policy Learning via Action Diffusion. 2023.doi: 10 . 48550 / arXiv.2303.04137
-
[8]
Danny Driess et al.PaLM-E: An Embodied Multimodal Language Model. 2023.doi: 10.48550/arXiv.2303. 03378
-
[9]
2024.doi:10.48550/arXiv.2401.02117
Zipeng Fu et al.Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleop- eration. 2024.doi:10.48550/arXiv.2401.02117
-
[10]
π0.5: A Vision-Language- Action Model with Open-World Generalization
Physical Intelligence et al. π0.5: A Vision-Language- Action Model with Open-World Generalization. 2025.doi: 10.48550/arXiv.2504.16054
-
[11]
2025.doi:10.48550/arXiv.2511.19433
Dong Jing et al.Mixture of Horizons in Action Chunking. 2025.doi:10.48550/arXiv.2511.19433
-
[12]
Alexander Khazatsky et al.DROID: A Large-Scale In- The-Wild Robot Manipulation Dataset. 2024.doi: 10 . 48550/arXiv.2403.12945
-
[13]
Moo Jin Kim et al.Fine-Tuning Vision-Language-Action Models: Optimizing Speed and Success. 2025.doi: 10. 48550/arXiv.2502.19645
-
[14]
Moo Jin Kim et al.OpenVLA: An Open-Source Vision- Language-Action Model. 2024.doi: 10.48550/arXiv. 2406.09246
-
[15]
Towards Learning Hierarchical Skills for Multi-Phase Manipulation Tasks
Oliver Kroemer et al. “Towards Learning Hierarchical Skills for Multi-Phase Manipulation Tasks”. In:2015 IEEE International Conference on Robotics and Automa- tion (ICRA). 2015.doi: 10.1109/ICRA.2015.7139389
arXiv 2015
-
[16]
Autonomous Framework for Segmenting Robot Trajectories of Ma- nipulation Task
Sang Hyoung Lee, Il Hong Suh, et al. “Autonomous Framework for Segmenting Robot Trajectories of Ma- nipulation Task”. In: (2015).doi: 10 . 1007 / s10514 - 014-9397-9
2015
-
[17]
2024.doi: 10.48550/ arXiv.2410.07864
Songming Liu et al.RDT-1B: A Diffusion Foundation Model for Bimanual Manipulation. 2024.doi: 10.48550/ arXiv.2410.07864
-
[18]
2023.doi:10.48550/arXiv.2310.08864
Open X-Embodiment Collaboration et al.Open X- Embodiment: Robotic Learning Datasets and RT-X Mod- els. 2023.doi:10.48550/arXiv.2310.08864
-
[19]
2025.doi: 10.48550/ arXiv.2501.09747
Karl Pertsch et al.FAST: Efficient Action Tokenization for Vision-Language-Action Models. 2025.doi: 10.48550/ arXiv.2501.09747
-
[20]
Mustafa Shukor et al.SmolVLA: A Vision-Language- Action Model for Affordable and Efficient Robotics. 2025. doi:10.48550/arXiv.2506.01844
-
[21]
Octo Model Team et al.Octo: An Open-Source Gener- alist Robot Policy. 2024.doi: 10.48550/arXiv.2405. 12213
-
[22]
Homer Walke et al.BridgeData V2: A Dataset for Robot Learning at Scale. 2023.doi: 10.48550/arXiv.2308. 12952
-
[23]
Haoxuan Wang et al.Real-Time Robot Execution with Masked Action Chunking. 2026.doi: 10.48550/arXiv. 2601.20130
-
[24]
2026.doi: 10.48550/arXiv.2602.21445
Haoxuan Wang et al.VLA Knows Its Limits. 2026.doi: 10.48550/arXiv.2602.21445
-
[25]
Adina Yakefu et al.RoboChallenge: Large-scale Real- robot Evaluation of Embodied Policies. 2025.doi: 10. 48550/arXiv.2510.17950
-
[26]
2026.doi:10.48550/arXiv.2602.15922
Seonghyeon Ye et al.World Action Models are Zero-shot Policies. 2026.doi:10.48550/arXiv.2602.15922
-
[27]
2024.doi:10.48550/arXiv.2403.03954
Yanjie Ze et al.3D Diffusion Policy: Generalizable Vi- suomotor Policy Learning via Simple 3D Representations. 2024.doi:10.48550/arXiv.2403.03954
-
[28]
Tianle Zhang et al.JoyAI-RA 0.1: A Foundation Model for Robotic Autonomy. 2026.doi: 10 . 48550 / arXiv . 2604.20100
-
[29]
Zhao et al.Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
Tony Z. Zhao et al.Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware. 2023.doi: 10. 48550/arXiv.2304.13705. 10 A PACE ImplementationNotes PACE is applied only at test time and does not modify or retrain the base policy. After each policy query, it analyzes the predicted action chunk and selects how many actions to execute before the next ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.