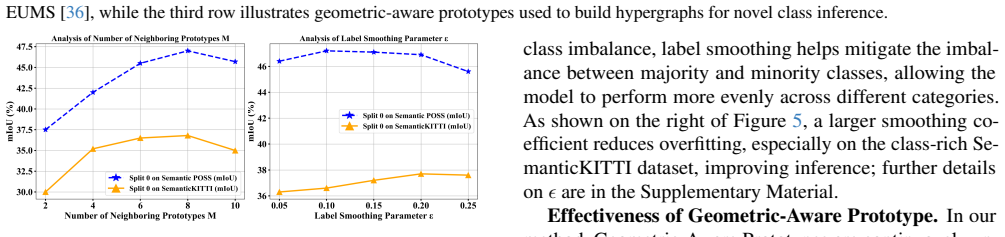
Geometric-Aware Hypergraph Reasoning for Novel Class Discovery in Point Cloud Segmentation
Pith reviewed 2026-06-27 22:31 UTC · model grok-4.3
The pith
A hypergraph framework with geometric prototypes transfers knowledge to novel classes in point cloud segmentation by modeling high-order associations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
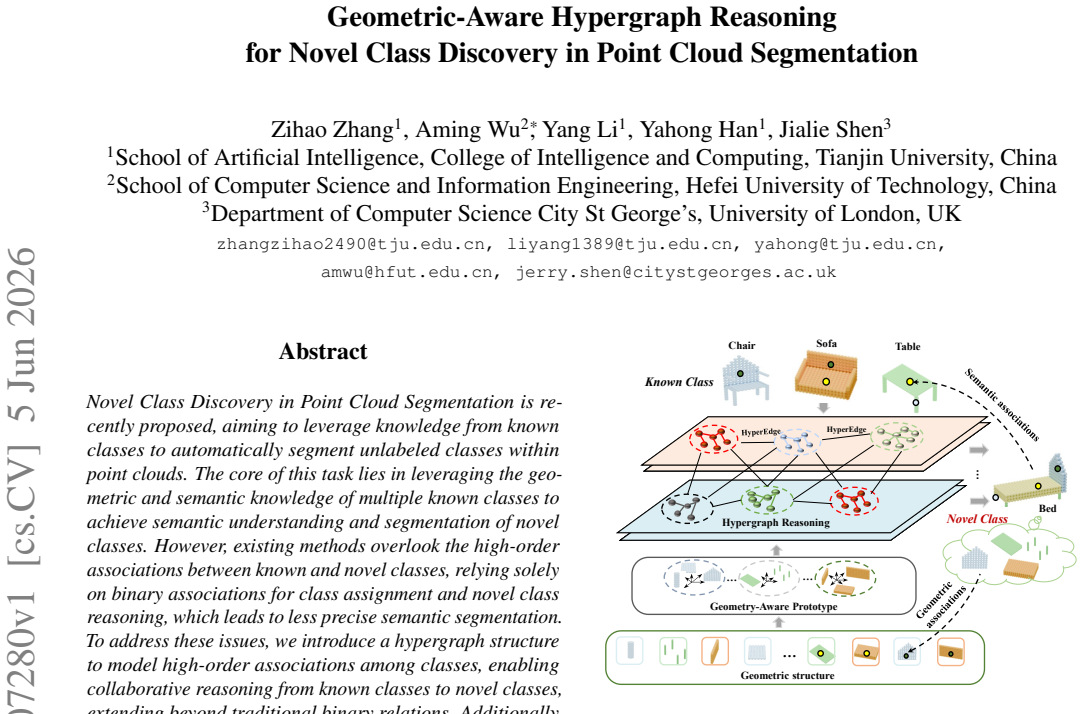
The paper claims that modeling high-order associations among classes via a hypergraph enables collaborative reasoning from known to novel classes, and that Geometric-Aware Prototypes improve this by supplying class-level geometric cues that are propagated through hyperedges, yielding more accurate segmentation than pairwise methods.
What carries the argument
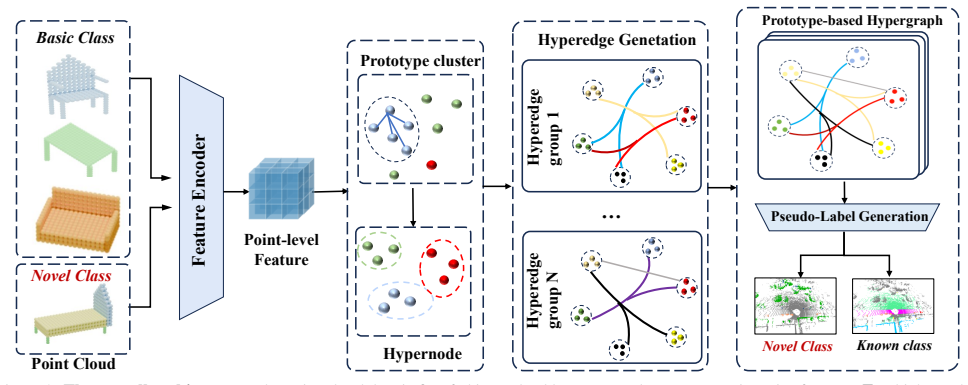
Hypergraph-based framework that models high-order class associations together with Geometric-Aware Prototypes that capture and propagate spatial geometric information.
If this is right
- Known-class knowledge transfers to novel classes through collaborative high-order reasoning rather than isolated pairwise links.
- Geometric information from point clouds improves class representations and is shared across classes via hyperedges.
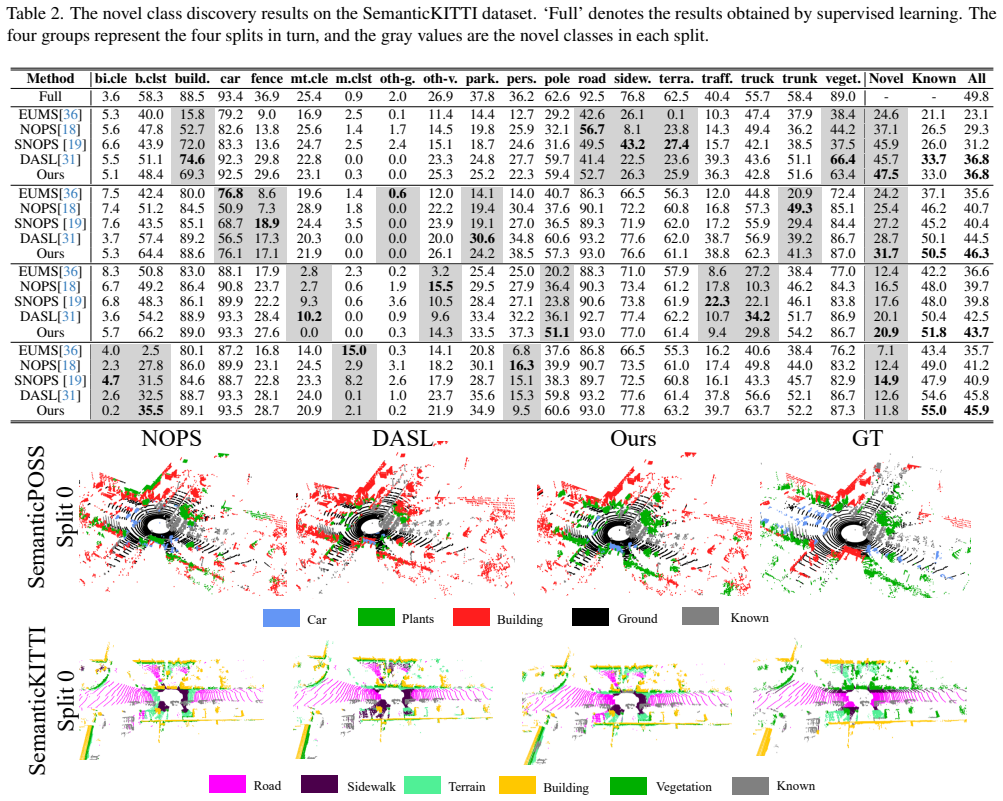
- Segmentation accuracy rises on SemanticKITTI and SemanticPOSS compared with existing pairwise approaches.
Where Pith is reading between the lines
- The same hypergraph structure could be tested on other 3D tasks where relational structure among categories is dense.
- If high-order modeling proves decisive, future work might replace pairwise graphs in related semi-supervised 3D settings.
- The geometric prototype component suggests that explicit spatial cues may help any relational model that currently relies only on semantic features.
Load-bearing premise
That high-order relations captured by hypergraphs plus geometric propagation through hyperedges will overcome the limits of pairwise associations and weak geometric attention.
What would settle it
An experiment on SemanticKITTI in which a standard pairwise graph baseline matches or exceeds the hypergraph method on novel-class segmentation accuracy would falsify the claim.
Figures
read the original abstract
Novel class discovery in point cloud segmentation aims to transfer knowledge from known classes to automatically identify and segment unlabeled novel classes in point clouds. Existing methods mainly rely on pairwise associations for class assignment and novel class reasoning, which limits their ability to capture complex relationships among known and novel classes and may lead to inaccurate semantic segmentation. To address this issue, we introduce a hypergraph-based framework that models high-order associations among classes and enables collaborative reasoning from known classes to novel classes beyond traditional pairwise relations. Moreover, existing methods tend to focus on semantic feature extraction while paying insufficient attention to geometric information in point clouds. To better exploit spatial structure, we propose Geometric-Aware Prototypes to enhance the representation of class-level geometric cues. By propagating geometric information through hyperedges, the proposed method improves the understanding of spatial distributions across classes and leads to more accurate segmentation. Experiments on the SemanticKITTI and SemanticPOSS datasets demonstrate the effectiveness and superiority of our method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a hypergraph-based framework for novel class discovery in point cloud segmentation that models high-order associations among known and novel classes to enable collaborative reasoning beyond pairwise relations, combined with Geometric-Aware Prototypes that propagate geometric cues through hyperedges for improved spatial understanding and segmentation accuracy; experiments on SemanticKITTI and SemanticPOSS are claimed to demonstrate superiority over existing methods.
Significance. If the experimental claims hold, the work could meaningfully extend novel class discovery techniques in 3D segmentation by addressing limitations of pairwise graph methods and underutilized geometric information, potentially improving transfer from labeled to unlabeled classes in real-world point cloud scenarios.
major comments (1)
- [Abstract] Abstract: the central claim of effectiveness and superiority is asserted without any quantitative metrics, baseline comparisons, ablation results, or error analysis, rendering it impossible to evaluate whether the hypergraph and prototype components deliver the stated gains.
minor comments (2)
- Clarify the exact construction of hyperedges and the propagation mechanism for geometric information in the method section to ensure reproducibility.
- Add explicit definitions or equations for the geometric-aware prototypes if they involve new parameters or loss terms.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive feedback. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of effectiveness and superiority is asserted without any quantitative metrics, baseline comparisons, ablation results, or error analysis, rendering it impossible to evaluate whether the hypergraph and prototype components deliver the stated gains.
Authors: We agree that the abstract would be strengthened by the inclusion of quantitative metrics and baseline comparisons to support the claims of effectiveness. In the revised version, we will update the abstract to report key results such as mIoU improvements on SemanticKITTI and SemanticPOSS relative to existing methods. Note that detailed ablations and error analyses are already present in the experimental section of the manuscript; we will ensure the abstract references the overall gains without duplicating those details. revision: yes
Circularity Check
No significant circularity
full rationale
The provided abstract and description outline a hypergraph framework and geometric-aware prototypes for novel class discovery in point cloud segmentation. No equations, fitted parameters, self-citations, or derivation steps are supplied that reduce a claimed prediction or result to its own inputs by construction. The central claims rest on architectural choices and experimental validation on SemanticKITTI and SemanticPOSS, which are presented as independent evaluations rather than tautological fits. The derivation chain is therefore self-contained against external benchmarks with no load-bearing self-referential steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Re- thinking few-shot 3d point cloud semantic segmentation
Zhaochong An, Guolei Sun, Yun Liu, Fayao Liu, Zongwei Wu, Dan Wang, Luc Van Gool, and Serge Belongie. Re- thinking few-shot 3d point cloud semantic segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, pages 3996–4006, 2024. 2
2024
-
[2]
Semantickitti: A dataset for semantic scene understanding of lidar sequences
Jens Behley, Martin Garbade, Andres Milioto, Jan Quenzel, Sven Behnke, Cyrill Stachniss, and Jurgen Gall. Semantickitti: A dataset for semantic scene understanding of lidar sequences. InProceedings of the IEEE/CVF international conference on computer vision, pages 9297–9307, 2019. 6
2019
-
[3]
Towards 3d lidar-based semantic scene understanding of 3d point cloud se- quences: The semantickitti dataset.The International Journal of Robotics Research, 40(8-9):959–967, 2021
Jens Behley, Martin Garbade, Andres Milioto, Jan Quenzel, Sven Behnke, Jürgen Gall, and Cyrill Stachniss. Towards 3d lidar-based semantic scene understanding of 3d point cloud se- quences: The semantickitti dataset.The International Journal of Robotics Research, 40(8-9):959–967, 2021. 6
2021
-
[4]
Hypergraph theory.An introduction
Alain Bretto. Hypergraph theory.An introduction. Mathemat- ical Engineering. Cham: Springer, 1, 2013. 2
2013
-
[5]
Qi Charles, Hao Su, Mo Kaichun, and Leonidas J
R. Qi Charles, Hao Su, Mo Kaichun, and Leonidas J. Guibas. Pointnet: Deep learning on point sets for 3d classification and segmentation. In2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017. 2
2017
-
[6]
4d spatio-temporal convnets: Minkowski convolutional neural networks
Christopher Choy, JunYoung Gwak, and Silvio Savarese. 4d spatio-temporal convnets: Minkowski convolutional neural networks. In2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019. 6, 7
2019
-
[7]
Hypergraph neural networks
Yifan Feng, Haoxuan You, Zizhao Zhang, Rongrong Ji, and Yue Gao. Hypergraph neural networks. InProceedings of the AAAI conference on artificial intelligence, pages 3558–3565,
-
[8]
A unified objective for novel class discovery
Enrico Fini, Enver Sangineto, Stéphane Lathuilière, Zhun Zhong, Moin Nabi, and Elisa Ricci. A unified objective for novel class discovery. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 9284– 9292, 2021. 2
2021
-
[9]
Are we ready for autonomous driving? the kitti vision benchmark suite
Andreas Geiger, Philip Lenz, and Raquel Urtasun. Are we ready for autonomous driving? the kitti vision benchmark suite. In2012 IEEE conference on computer vision and pattern recognition, pages 3354–3361. IEEE, 2012. 6
2012
-
[10]
Learning to discover novel visual categories via deep transfer clustering
Kai Han, Andrea Vedaldi, and Andrew Zisserman. Learning to discover novel visual categories via deep transfer clustering. In2019 IEEE/CVF International Conference on Computer Vision (ICCV), 2019. 2
2019
-
[11]
Autonovel: Automati- cally discovering and learning novel visual categories.IEEE Transactions on Pattern Analysis and Machine Intelligence, page 1–1, 2021
Kai Han, Sylvestre-Alvise Rebuffi, Sebastien Ehrhardt, An- drea Vedaldi, and Andrew Zisserman. Autonovel: Automati- cally discovering and learning novel visual categories.IEEE Transactions on Pattern Analysis and Machine Intelligence, page 1–1, 2021. 2
2021
-
[12]
Large-scale point cloud semantic segmentation with superpoint graphs
Loic Landrieu and Martin Simonovsky. Large-scale point cloud semantic segmentation with superpoint graphs. In 2018 IEEE/CVF Conference on Computer Vision and Pat- tern Recognition, 2018. 1
2018
-
[13]
Chapman, Dongpu Cao, and Jonathan Li
Ying Li, Lingfei Ma, Zilong Zhong, Fei Liu, Michael A. Chapman, Dongpu Cao, and Jonathan Li. Deep learning for lidar point clouds in autonomous driving: A review.IEEE Transactions on Neural Networks and Learning Systems, page 3412–3432, 2021. 1, 2
2021
-
[14]
Yang Li, Aming Wu, Zihao Zhang, and Yahong Han. Novel class discovery for point cloud segmentation via joint learn- ing of causal representation and reasoning.arXiv preprint arXiv:2510.13307, 2025. 2
-
[15]
Decoupled Weight Decay Regularization
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101, 2017. 6
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[16]
Semanticposs: A point cloud dataset with large quantity of dynamic instances
Yancheng Pan, Biao Gao, Jilin Mei, Sibo Geng, Chengkun Li, and Huijing Zhao. Semanticposs: A point cloud dataset with large quantity of dynamic instances. In2020 IEEE Intelligent Vehicles Symposium (IV), pages 687–693. IEEE, 2020. 6
2020
-
[17]
Pointnet++: Deep hierarchical feature learning on point sets in a metric space.Advances in neural information processing systems, 30, 2017
Charles Ruizhongtai Qi, Li Yi, Hao Su, and Leonidas J Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space.Advances in neural information processing systems, 30, 2017. 2
2017
-
[18]
Novel class discovery for 3d point cloud semantic segmenta- tion
Luigi Riz, Cristiano Saltori, Elisa Ricci, and Fabio Poiesi. Novel class discovery for 3d point cloud semantic segmenta- tion. InProceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition, pages 9393–9402, 2023. 1, 2, 5, 6, 7
2023
-
[19]
Novel class discovery meets foundation mod- els for 3d semantic segmentation.International Journal of Computer Vision, 133(2):527–548, 2025
Luigi Riz, Cristiano Saltori, Yiming Wang, Elisa Ricci, and Fabio Poiesi. Novel class discovery meets foundation mod- els for 3d semantic segmentation.International Journal of Computer Vision, 133(2):527–548, 2025. 6, 7
2025
-
[20]
Automotive lidar technology: A survey.IEEE Transactions on Intelligent Transportation Systems, page 6282–6297, 2022
Ricardo Roriz, Jorge Cabral, and Tiago Gomes. Automotive lidar technology: A survey.IEEE Transactions on Intelligent Transportation Systems, page 6282–6297, 2022. 1, 2
2022
-
[21]
Forestlpr: Lidar place recognition in forests attentioning multiple bev density images
Yanqing Shen, Turcan Tuna, Marco Hutter, Cesar Cadena, and Nanning Zheng. Forestlpr: Lidar place recognition in forests attentioning multiple bev density images. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 6659–6669, 2025. 1, 2
2025
-
[22]
Unseen Class Discovery in Open-world Classification
Lei Shu, Hu Xu, and Bing Liu. Unseen class discovery in open-world classification.arXiv preprint arXiv:1801.05609,
work page internal anchor Pith review Pith/arXiv arXiv
-
[23]
Image understands point cloud: Weakly supervised 3d semantic segmentation via association learning.IEEE Transactions on Image Processing, 2024
Tianfang Sun, Zhizhong Zhang, Xin Tan, Yanyun Qu, and Yuan Xie. Image understands point cloud: Weakly supervised 3d semantic segmentation via association learning.IEEE Transactions on Image Processing, 2024. 2
2024
-
[24]
Sparsedrive: End-to-end au- tonomous driving via sparse scene representation
Wenchao Sun, Xuewu Lin, Yining Shi, Chuang Zhang, Hao- ran Wu, and Sifa Zheng. Sparsedrive: End-to-end au- tonomous driving via sparse scene representation. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 8795–8801. IEEE, 2025. 2
2025
- [25]
-
[26]
Kpconv: Flexible and deformable convolution for point clouds
Hugues Thomas, Charles R Qi, Jean-Emmanuel Deschaud, Beatriz Marcotegui, François Goulette, and Leonidas J Guibas. Kpconv: Flexible and deformable convolution for point clouds. InProceedings of the IEEE/CVF international conference on computer vision, pages 6411–6420, 2019. 1
2019
-
[27]
Generalized category discovery
Sagar Vaze, Kai Hant, Andrea Vedaldi, and Andrew Zisser- man. Generalized category discovery. In2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022. 2
2022
-
[28]
Preserving clusters in prompt learning for unsupervised domain adaptation
Tung-Long Vuong, Hoang Phan, Vy V o, Anh Bui, Thanh- Toan Do, Trung Le, and Dinh Phung. Preserving clusters in prompt learning for unsupervised domain adaptation. In Proceedings of the Computer Vision and Pattern Recognition Conference, pages 19974–19984, 2025. 1, 2
2025
-
[29]
Jie Wang, Guang Li, Zhijian Huang, Chenxu Dang, Hangjun Ye, Yahong Han, and Long Chen. Vggdrive: Empowering vision-language models with cross-view geometric grounding for autonomous driving.arXiv preprint arXiv:2602.20794,
-
[30]
Single-domain generalized object detection in urban scene via cyclic-disentangled self- distillation
Aming Wu and Cheng Deng. Single-domain generalized object detection in urban scene via cyclic-disentangled self- distillation. InProceedings of the IEEE/CVF Conference on computer vision and pattern recognition, pages 847–856,
-
[31]
Dual- level adaptive self-labeling for novel class discovery in point cloud segmentation
Ruijie Xu, Chuyu Zhang, Hui Ren, and Xuming He. Dual- level adaptive self-labeling for novel class discovery in point cloud segmentation. InEuropean Conference on Computer Vision, pages 288–305. Springer, 2024. 2, 6, 7
2024
-
[32]
Open-vocabulary object detection using captions
Alireza Zareian, Kevin Dela Rosa, Derek Hao Hu, and Shih- Fu Chang. Open-vocabulary object detection using captions. In2021 IEEE/CVF Conference on Computer Vision and Pat- tern Recognition (CVPR), 2021. 2
2021
-
[33]
Novel class discovery for long-tailed recognition.arXiv preprint arXiv:2308.02989, 2023
Chuyu Zhang, Ruijie Xu, and Xuming He. Novel class discovery for long-tailed recognition.arXiv preprint arXiv:2308.02989, 2023. 2
-
[34]
Style evolving along chain-of-thought for unknown-domain object detection
Zihao Zhang, Aming Wu, and Yahong Han. Style evolving along chain-of-thought for unknown-domain object detection. InProceedings of the Computer Vision and Pattern Recogni- tion Conference, pages 14225–14234, 2025. 2
2025
-
[35]
Learning semi- supervised gaussian mixture models for generalized category discovery
Bingchen Zhao, Xin Wen, and Kai Han. Learning semi- supervised gaussian mixture models for generalized category discovery. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 16623–16633, 2023. 2
2023
-
[36]
Novel class discovery in semantic segmentation
Yuyang Zhao, Zhun Zhong, Nicu Sebe, and Gim Hee Lee. Novel class discovery in semantic segmentation. InProceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4340–4349, 2022. 6, 7, 8
2022
-
[37]
Neighborhood contrastive learning for novel class discovery
Zhun Zhong, Enrico Fini, Subhankar Roy, Zhiming Luo, Elisa Ricci, and Nicu Sebe. Neighborhood contrastive learning for novel class discovery. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 10867–10875, 2021. 2
2021
-
[38]
arXiv preprint arXiv:2310.06773 , year=
Junsheng Zhou, Jinsheng Wang, Baorui Ma, Yu-Shen Liu, Tiejun Huang, and Xinlong Wang. Uni3d: Exploring unified 3d representation at scale.arXiv preprint arXiv:2310.06773,
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.