Simultaneous Online System Identification and Control using Composite Adaptive Lyapunov-Based Deep Neural Networks
Pith reviewed 2026-05-25 09:07 UTC · model grok-4.3
The pith
Lyapunov-based adaptation of all DNN layers enables simultaneous online system identification and trajectory tracking for nonlinear systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
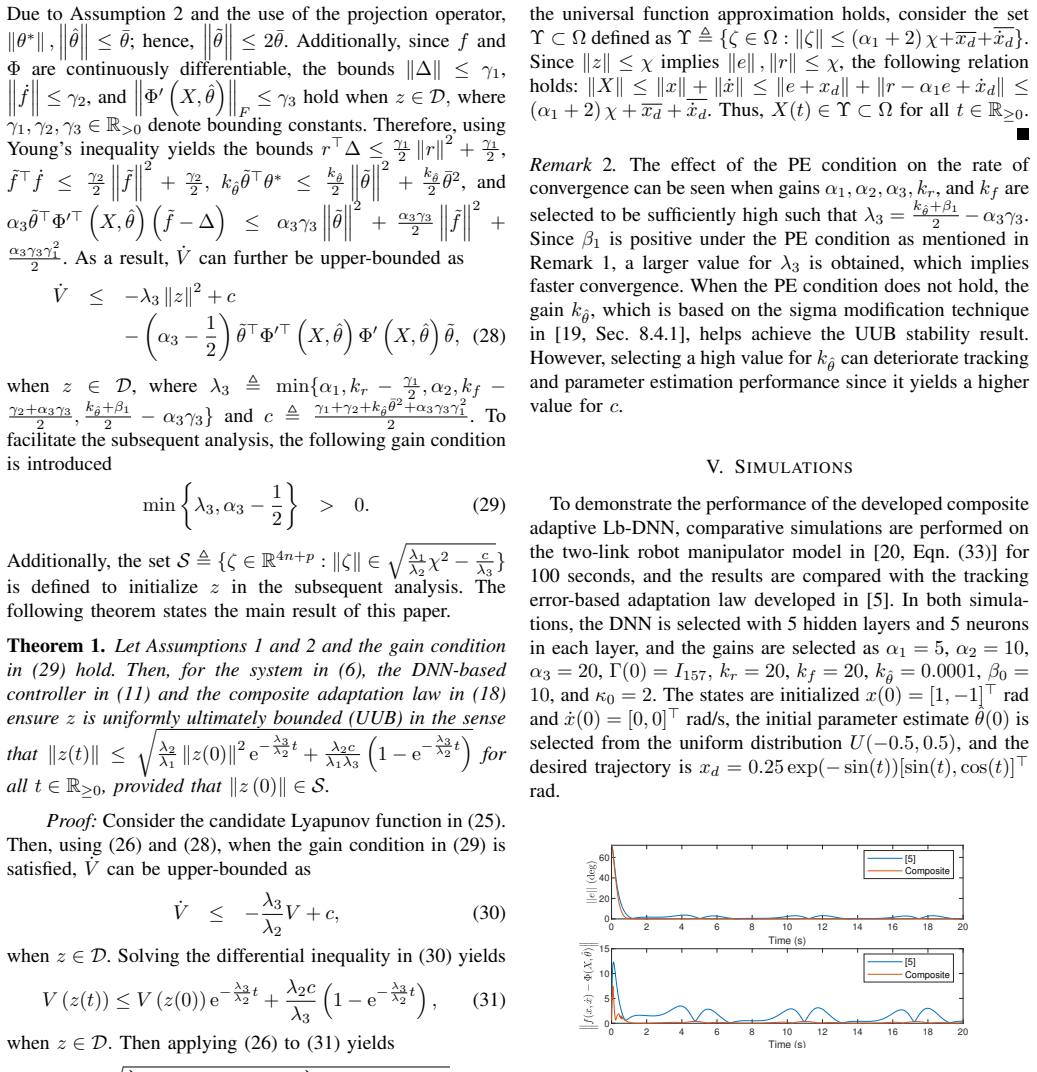
This paper provides the first result on simultaneous online system identification and trajectory tracking control of nonlinear systems using adaptive updates for all layers of the DNN. A combined Lyapunov-based stability analysis is provided, which guarantees that the tracking error, state-derivative estimation error, and DNN weight estimation errors are uniformly ultimately bounded. Under the persistence of excitation (PE) condition, the tracking and weight estimation errors are shown to exponentially converge to a neighborhood of the origin, where the rate of convergence and the size of this neighborhood depends on the gains and a factor quantifying PE, thus achieving system identification
What carries the argument
Composite adaptive update laws for DNN weights that use both tracking error and state-derivative estimation error inside a single Lyapunov function.
Load-bearing premise
The persistence of excitation condition must hold for the exponential convergence result.
What would settle it
If tracking and weight errors remain only ultimately bounded and do not converge exponentially when the persistence of excitation condition is satisfied, the stronger claim is falsified.
Figures

read the original abstract
Although deep neural network (DNN)-based controllers are popularly used to control uncertain nonlinear dynamic systems, most results use DNNs that are pretrained offline and the corresponding controller is implemented post-training. Recent advancements in adaptive control have developed controllers with Lyapunov-based update laws (i.e., control and update laws derived from a Lyapunov-based stability analysis) for updating the DNN weights online to ensure the system states track a desired trajectory. However, the update laws are based on the tracking error, and offer guarantees on only the tracking error convergence, without providing any guarantees on system identification. This paper provides the first result on simultaneous online system identification and trajectory tracking control of nonlinear systems using adaptive updates for all layers of the DNN. A combined Lyapunov-based stability analysis is provided, which guarantees that the tracking error, state-derivative estimation error, and DNN weight estimation errors are uniformly ultimately bounded. Under the persistence of excitation (PE) condition, the tracking and weight estimation errors are shown to exponentially converge to a neighborhood of the origin, where the rate of convergence and the size of this neighborhood depends on the gains and a factor quantifying PE, thus achieving system identification and enhanced trajectory tracking performance. As an outcome of the system identification, the DNN model can be propagated forward to predict and compensate for the uncertainty in dynamics under intermittent loss of state feedback. Comparative simulation results are provided on a two-link manipulator system and an unmanned underwater vehicle system with intermittent loss of state feedback, where the developed method yields significant performance improvement compared to baseline methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a composite adaptive Lyapunov-based approach for simultaneous online system identification and trajectory tracking control of uncertain nonlinear systems using deep neural networks (DNNs) with adaptive updates for all layers. A combined Lyapunov analysis is used to prove uniform ultimate boundedness of the tracking error, state-derivative estimation error, and weight estimation errors. Under a persistence of excitation (PE) condition, exponential convergence of the tracking and weight errors to a neighborhood of zero is shown, with the neighborhood size and convergence rate depending on gains and a PE factor. The approach is demonstrated in simulations on a two-link manipulator and an unmanned underwater vehicle with intermittent state feedback loss, showing improved performance over baselines.
Significance. If the stability claims hold, this would be a notable contribution as it provides the first such result for full DNN layer adaptation enabling both control and identification, with practical implications for systems experiencing feedback interruptions. The simulation results lend support to the performance claims.
major comments (2)
- [Abstract] The stronger claims of exponential convergence and system identification hinge on the persistence of excitation (PE) condition for the composite regressor. The paper states this assumption explicitly but offers no indication that the control or composite update laws are constructed to satisfy or monitor PE for the DNN in closed loop; without it, the result reduces to UUB only, which is a load-bearing concern for the identification guarantee.
- [Lyapunov Analysis] The abstract describes a combined Lyapunov-based stability analysis producing the UUB and exponential convergence claims, but the full derivation is needed to verify the composite update law construction and the precise handling of the state-derivative estimation error term to ensure the bounds are correctly derived without unaccounted residuals.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] The stronger claims of exponential convergence and system identification hinge on the persistence of excitation (PE) condition for the composite regressor. The paper states this assumption explicitly but offers no indication that the control or composite update laws are constructed to satisfy or monitor PE for the DNN in closed loop; without it, the result reduces to UUB only, which is a load-bearing concern for the identification guarantee.
Authors: We agree that the exponential convergence and associated identification guarantees are conditional on the PE assumption for the composite regressor, which is explicitly stated in the manuscript. As is standard in adaptive control, the laws are not constructed to enforce or monitor PE in closed loop, since guaranteeing PE for general nonlinear systems without additional probing signals (which could degrade tracking) remains an open problem. The primary contribution is the composite adaptation framework that yields UUB unconditionally and exponential convergence under PE. We will revise the abstract, introduction, and conclusions to more explicitly distinguish the UUB result from the conditional exponential result and add a remark on the PE assumption. revision: yes
-
Referee: [Lyapunov Analysis] The abstract describes a combined Lyapunov-based stability analysis producing the UUB and exponential convergence claims, but the full derivation is needed to verify the composite update law construction and the precise handling of the state-derivative estimation error term to ensure the bounds are correctly derived without unaccounted residuals.
Authors: The combined Lyapunov analysis, including derivation of the composite update laws for all DNN layers and explicit bounding of the state-derivative estimation error (along with all cross terms and residuals) to obtain the UUB result, is provided in Sections III-B and III-C. The exponential result under PE follows directly from the same Lyapunov function with an additional PE-based term. To address the request for verification, we will add a supplementary appendix containing the complete step-by-step expansion of the Lyapunov derivative with all intermediate bounds shown. revision: yes
Circularity Check
No circularity: Lyapunov analysis and PE assumption are independent of paper's own fitted quantities or self-definitions
full rationale
The paper's central claims rest on a combined Lyapunov-based stability analysis that guarantees UUB for tracking, derivative estimation, and weight errors, with exponential convergence under the external PE condition. The PE requirement is stated explicitly as an assumption for the stronger result and is not derived from or reduced to the paper's equations, update laws, or any fitted parameters. No self-definitional steps, fitted inputs renamed as predictions, or load-bearing self-citations appear in the derivation chain. The analysis follows standard adaptive control techniques and remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The DNN is capable of approximating the system uncertainty with a bounded reconstruction error.
- domain assumption Persistence of excitation (PE) condition holds on the regressor signals.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
A combined Lyapunov-based stability analysis is provided, which guarantees that the tracking error, state-derivative estimation error, and DNN weight estimation errors are uniformly ultimately bounded. Under the persistence of excitation (PE) condition...
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the Jacobian of the DNN is used in a composite adaptation law
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
S. L. Brunton and J. N. Kutz, Data-driven science and engineering: Ma- chine learning, dynamical systems, and control . Cambridge University Press, 2019
work page 2019
-
[2]
Asynchronous deep model reference adaptive control,
G. Joshi, J. Virdi, and G. Chowdhary, “Asynchronous deep model reference adaptive control,” Proc. PMLR Conf. Robot Learn. , pp. 4601– 4608, November 2020
work page 2020
-
[3]
Lyapunov-based real-time and iterative adjustment of deep neural networks,
R. Sun, M. Greene, D. Le, Z. Bell, G. Chowdhary, and W. E. Dixon, “Lyapunov-based real-time and iterative adjustment of deep neural networks,” IEEE Control Syst. Lett. , vol. 6, pp. 193–198, 2022
work page 2022
-
[4]
Real-time modular deep neural network-based adaptive control of nonlinear systems,
D. Le, M. Greene, W. Makumi, and W. E. Dixon, “Real-time modular deep neural network-based adaptive control of nonlinear systems,”IEEE Control Syst. Lett. , vol. 6, pp. 476–481, 2022
work page 2022
-
[5]
O. Patil, D. Le, M. Greene, and W. E. Dixon, “Lyapunov-derived control and adaptive update laws for inner and outer layer weights of a deep neural network,” IEEE Control Syst Lett. , vol. 6, pp. 1855–1860, 2022
work page 2022
-
[6]
Accelerated gra- dient approach for neural network-based adaptive control of nonlinear systems,
D. M. Le, O. S. Patil, C. Nino, and W. E. Dixon, “Accelerated gra- dient approach for neural network-based adaptive control of nonlinear systems,” in Proc. IEEE Conf. Decis. Control , 2022
work page 2022
-
[7]
E. Vacchini, N. Sacchi, G. P. Incremona, and A. Ferrara, “Design of a deep neural network-based integral sliding mode control for nonlinear systems under fully unknown dynamics,”IEEE Control Syst. Lett., 2023
work page 2023
-
[8]
S. Li, H. T. Nguyen, and C. C. Cheah, “A theoretical framework for end- to-end learning of deep neural networks with applications to robotics,” IEEE Access , vol. 11, pp. 21992–22006, 2023
work page 2023
-
[9]
Deep residual neural network (ResNet)-based adaptive control: A Lyapunov-based approach,
O. S. Patil, D. M. Le, E. Griffis, and W. E. Dixon, “Deep residual neural network (ResNet)-based adaptive control: A Lyapunov-based approach,” in Proc. IEEE Conf. Decis. Control , 2022
work page 2022
-
[10]
Lyapunov-based long short-term memory (Lb-LSTM) neural network-based control,
E. Griffis, O. Patil, Z. Bell, and W. E. Dixon, “Lyapunov-based long short-term memory (Lb-LSTM) neural network-based control,” IEEE Control Syst. Lett. , vol. 7, pp. 2976–2981, 2023
work page 2023
-
[11]
Composite adaptive control of robot manipu- lators,
J. J. Slotine and W. Li, “Composite adaptive control of robot manipu- lators,” Automatica, vol. 25, pp. 509–519, July 1989
work page 1989
-
[12]
Composite adaptive control for Euler-Lagrange systems with additive disturbances,
P. Patre, W. Mackunis, M. Johnson, and W. E. Dixon, “Composite adaptive control for Euler-Lagrange systems with additive disturbances,” Automatica, vol. 46, no. 1, pp. 140–147, 2010
work page 2010
-
[13]
Composite adaptation for neural network-based controllers,
P. Patre, S. Bhasin, Z. D. Wilcox, and W. E. Dixon, “Composite adaptation for neural network-based controllers,” IEEE Trans. Autom. Control, vol. 55, no. 4, pp. 944–950, 2010
work page 2010
-
[14]
D. S. Bernstein, Matrix mathematics . Princeton university press, 2009
work page 2009
-
[15]
Universal approximation with deep narrow networks,
P. Kidger and T. Lyons, “Universal approximation with deep narrow networks,” in Conf. Learn. Theory , pp. 2306–2327, 2020
work page 2020
-
[16]
Multilayer neural-net robot controller with guaranteed tracking performance,
F. L. Lewis, A. Yegildirek, and K. Liu, “Multilayer neural-net robot controller with guaranteed tracking performance,” IEEE Trans. Neural Netw., vol. 7, pp. 388–399, Mar. 1996
work page 1996
- [17]
-
[18]
Robust gradient-based adaptive control of nonlinearly parametrized plants,
S. B. Roy, S. Bhasin, and I. N. Kar, “Robust gradient-based adaptive control of nonlinearly parametrized plants,” IEEE Control Syst. Lett. , vol. 1, no. 2, pp. 352–357, 2017
work page 2017
- [19]
-
[20]
Integral concurrent learning: Adaptive control with parameter convergence using finite excitation,
A. Parikh, R. Kamalapurkar, and W. E. Dixon, “Integral concurrent learning: Adaptive control with parameter convergence using finite excitation,” Int J Adapt Control Signal Process , vol. 33, pp. 1775–1787, Dec. 2019
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.