Selecting haptic guidance models in teleoperation: guidelines from a comparative user study
Pith reviewed 2026-06-28 09:48 UTC · model grok-4.3
The pith
Haptic guidance models perform differently by environment with no universal winner.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
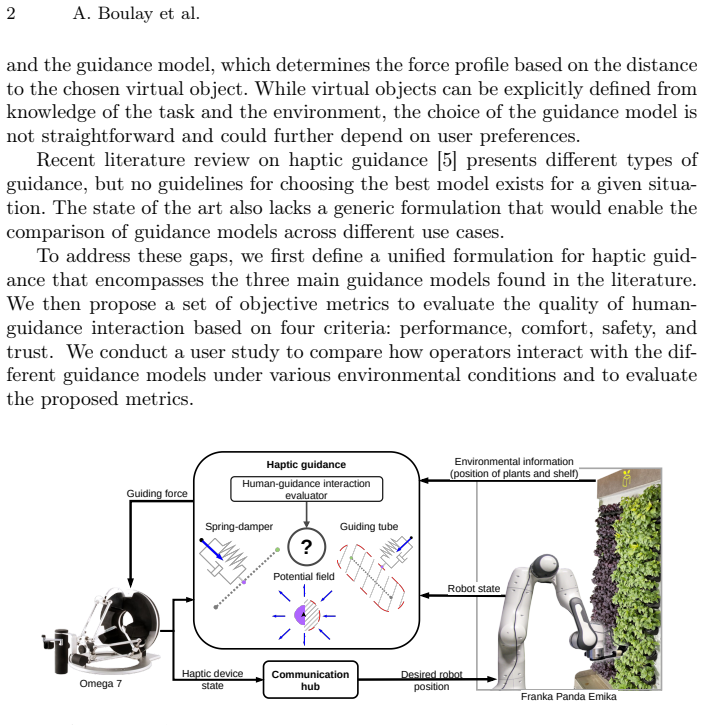
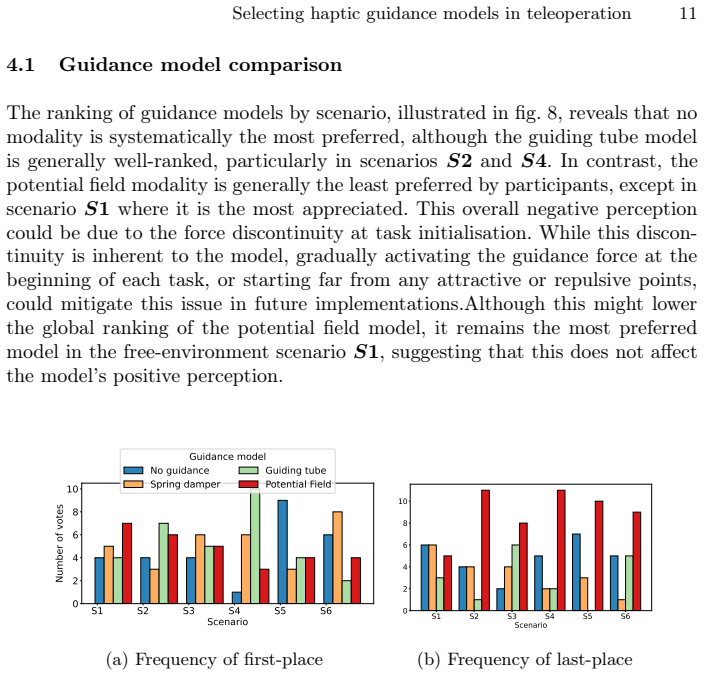
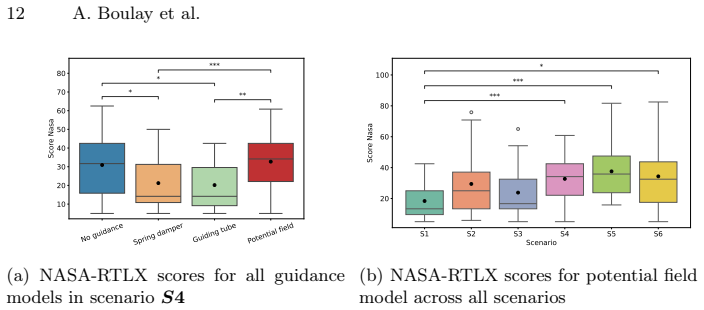
The central claim is that haptic guidance in teleoperation has no single best model; performance instead depends on the surrounding conditions, with spring-damper favored in clutter, potential field favored in free space (with noted risks), and guiding tube providing balance, all derived from direct user comparison and new interaction metrics.
What carries the argument
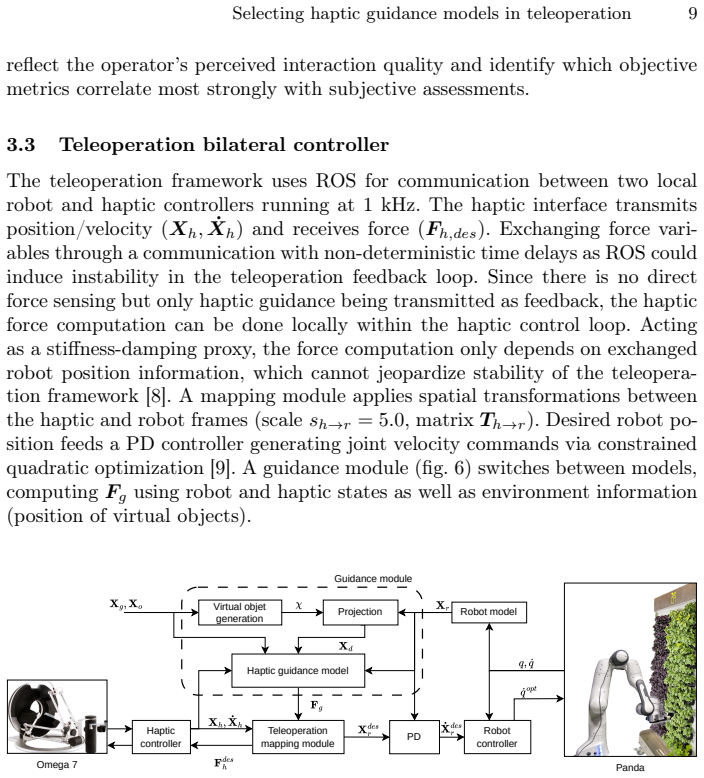
Unified stiffness-damping formulation with model-specific guiding functions, used to run head-to-head comparison of spring-damper, potential field, and guiding tube in the same experimental setup.
If this is right
- Spring-damper should be selected when the workspace contains many obstacles.
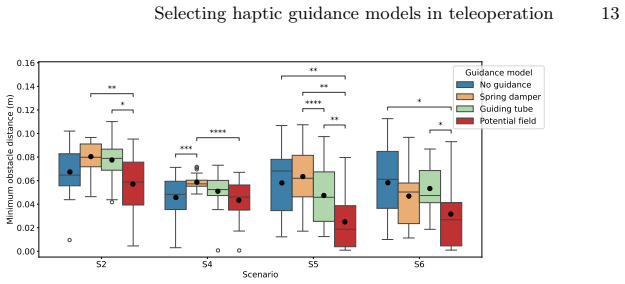
- Potential-field guidance should be avoided or augmented with safeguards when the end-effector must pass close to obstacles.
- Guiding-tube behavior offers a stable default when environmental density is unknown in advance.
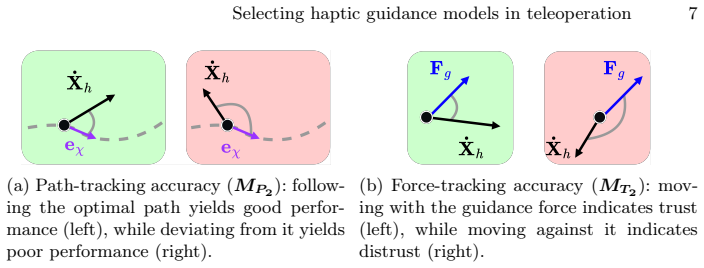
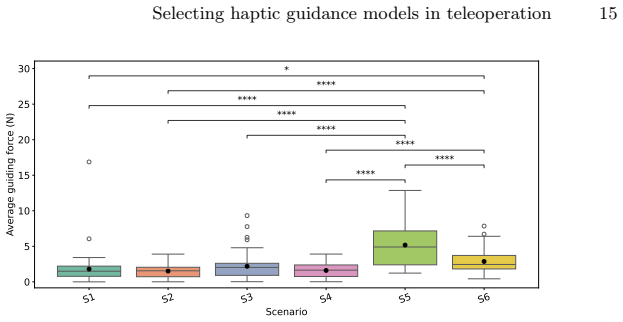
- Real-time monitoring of guiding-force magnitude can serve as an online indicator of operator comfort and trust.
- The proposed objective metrics supply an alternative to purely subjective questionnaires for evaluating haptic interfaces.
Where Pith is reading between the lines
- The same model-ranking logic could be tested in domains such as underwater or aerial teleoperation to check whether clutter versus openness remains the decisive factor.
- Control software could monitor force magnitude continuously and switch models on the fly when the metric crosses a comfort threshold.
- The observed force-comfort link implies that designers should prioritize low-magnitude guidance even when task performance metrics appear acceptable.
- Future work could add dynamic obstacles or multi-operator teams to see whether the current guidelines still hold under changing conditions.
Load-bearing premise
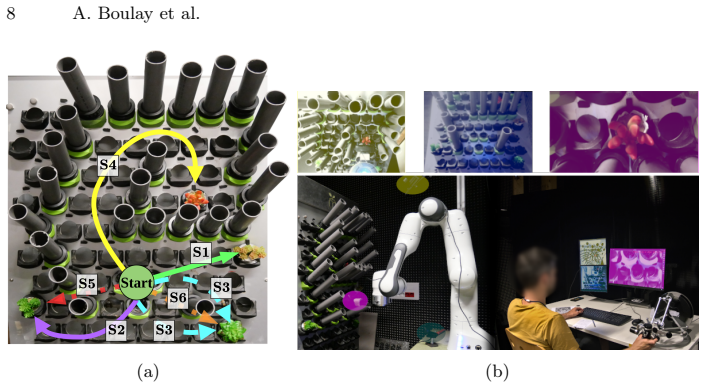
The vertical farming task and its six environmental scenarios are representative enough to support general guidelines for choosing haptic models in other teleoperation settings.
What would settle it
A replication study performed in a markedly different domain, such as remote assembly or surgical manipulation, that yields a different ranking of the three models or no environment-dependent performance gaps would falsify the claimed selection guidelines.
Figures

read the original abstract
Haptic guidance in teleoperation enhances operator performance through force feedback. This paper presents guidelines to select the most appropriate model considering the task, the environment and the operator. We define a unified formulation expressing most common models (spring-damper, potential field, and guiding tube) as variations of a stiffness-damping system with model-specific guiding functions. We conducted a user study comparing the three classical models across six scenarios with varying environmental conditions in a vertical farming task. Results show no universally superior model: spring-damper excels in cluttered environments, potential field in free spaces (but it shows risks near obstacles), and guiding tube offers a balanced compromise. We propose novel objective metrics to evaluate the interaction, and show that guiding force magnitude correlates with comfort and trust scores. These findings provide practical model selection guidelines through environmental characteristics and real-time evaluation metrics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript unifies common haptic guidance models (spring-damper, potential field, guiding tube) as variants of a stiffness-damping system with model-specific guiding functions. It reports a user study comparing the three models across six scenarios in a vertical farming teleoperation task, finding no universally superior model: spring-damper excels in clutter, potential field in free space (with obstacle risks), and guiding tube as a balanced option. Novel objective metrics are introduced, guiding force magnitude is shown to correlate with comfort/trust scores, and the results are used to derive practical model-selection guidelines based on environmental characteristics.
Significance. If the empirical results and correlations prove robust, the work supplies concrete, environment-dependent selection guidelines that could improve safety and performance in teleoperated systems. The unified formulation and proposed metrics are incremental but useful contributions to the haptic guidance literature.
major comments (2)
- [Discussion / Conclusion] The central claim that the study yields general 'practical model selection guidelines' for teleoperation rests on the unexamined assumption that the vertical farming task and its six scenarios are representative of broader domains (e.g., surgery, manufacturing). No cross-task validation, argument for representativeness, or discussion of task-specific biases is supplied; this directly affects the scope of the guidelines.
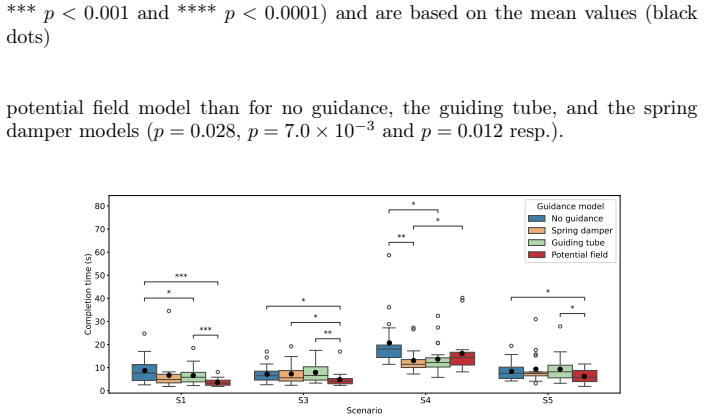
- [Abstract / Results] The abstract (and potentially the results section) reports performance rankings and correlations without participant counts, statistical tests, p-values, or error bars. If the main text similarly omits these details, the reliability of claims such as 'spring-damper excels in cluttered environments' and the force-comfort correlation cannot be assessed.
minor comments (1)
- [§2 (Formulation)] Notation for the unified stiffness-damping formulation could be clarified with an explicit table mapping each model to its guiding function parameters.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and agree to revisions that strengthen the manuscript's clarity and rigor without overstating the results.
read point-by-point responses
-
Referee: [Discussion / Conclusion] The central claim that the study yields general 'practical model selection guidelines' for teleoperation rests on the unexamined assumption that the vertical farming task and its six scenarios are representative of broader domains (e.g., surgery, manufacturing). No cross-task validation, argument for representativeness, or discussion of task-specific biases is supplied; this directly affects the scope of the guidelines.
Authors: We agree that the guidelines are derived from one task domain and that explicit discussion of scope is needed. The vertical farming scenarios were chosen to capture common teleoperation challenges (clutter vs. free space), but we did not provide arguments for representativeness or address potential biases. In revision we will add a paragraph to the Discussion explicitly limiting the guidelines to similar structured environments, noting the absence of cross-domain validation, and recommending future studies in other domains such as surgery or manufacturing. This will qualify the claims appropriately. revision: yes
-
Referee: [Abstract / Results] The abstract (and potentially the results section) reports performance rankings and correlations without participant counts, statistical tests, p-values, or error bars. If the main text similarly omits these details, the reliability of claims such as 'spring-damper excels in cluttered environments' and the force-comfort correlation cannot be assessed.
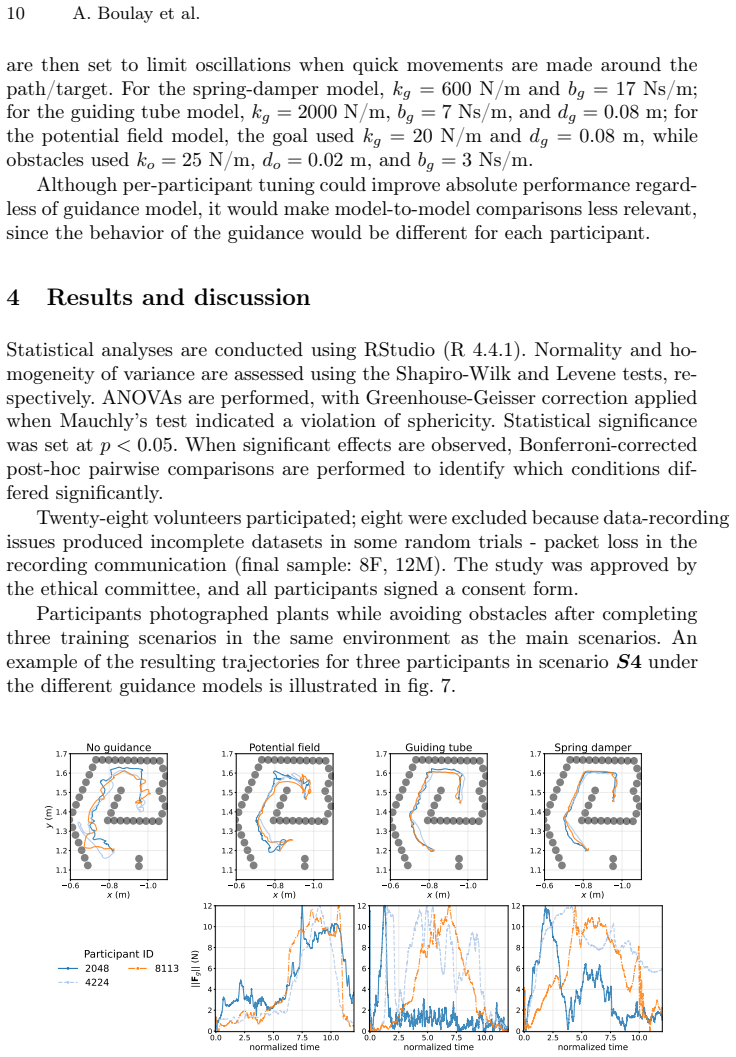
Authors: The main text reports 12 participants, ANOVA results with p-values, and error bars on all figures. The abstract, however, omits these details. We will revise the abstract to state the participant count, note that reported differences reached statistical significance, and indicate that the force-comfort correlation was assessed with appropriate tests. This ensures all claims are presented with the necessary statistical context. revision: yes
Circularity Check
Empirical user study exhibits no circular derivations
full rationale
The paper is a comparative user study that unifies three haptic models via a shared stiffness-damping formulation, runs experiments across six scenarios in one vertical farming task, defines objective metrics from the collected data, and reports observed correlations and performance rankings. No load-bearing step reduces a claimed prediction or guideline to a fitted parameter, self-citation, or definitional equivalence; the guidelines are explicitly presented as empirical observations rather than derived necessities. The representativeness assumption noted by the skeptic is a question of external validity, not an internal circular reduction.
Axiom & Free-Parameter Ledger
axioms (1)
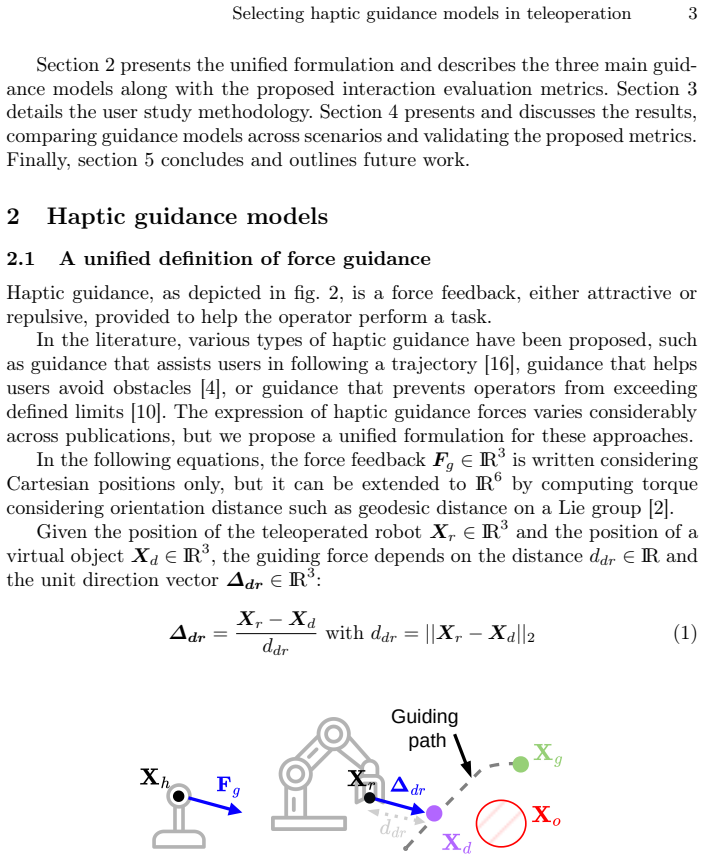
- domain assumption Most common haptic guidance models can be expressed as variations of a stiffness-damping system with model-specific guiding functions.
Reference graph
Works this paper leans on
-
[1]
Abi-Farraj, F., Pacchierotti, C., Arenz, O., Neumann, G., Giordano, P.: A haptic shared-control architecture for guided multi-target robotic grasping. IEEE Trans. Haptics pp. 270–285 (2020).https://doi.org/10.1109/TOH.2019.2913643
-
[2]
Alberto, N.: Predictive control of collaborative robots in dynamic contexts. Ph.D. thesis, Univ. Bordeaux (2023)
2023
-
[3]
Benhabib, N., Padois, V., Daney, D.: An approach to quantify manual expertise with collaborative robotics in mind (2021), working paper or preprint
2021
-
[4]
In: Progress in Flight Dynamics, Guidance, Navigation, and Con- trol
Binet, L., Rakotomamonjy, T.: Using haptic feedbacks for obstacle avoidance in helicopter flight. In: Progress in Flight Dynamics, Guidance, Navigation, and Con- trol. pp. 47–70 (2018).https://doi.org/10.1051/eucass/201810047
-
[5]
Bowyer, S., Davies, B., y Baena, F.: Active constraints/virtual fixtures: A survey. IEEE Trans. Robot. pp. 138–157 (2013).https://doi.org/10.1109/TRO.2013. 2283410
-
[6]
Davies, B., Jakopec, M., Harris, S., Baena, F., Barrett, A., Evangelidis, A., Gomes, P., Henckel, J., Cobb, J.: Active-constraint robotics for surgery. Proc. IEEE pp. 1696–1704 (2006).https://doi.org/10.1109/JPROC.2006.880680
-
[7]
Georgsson, M.: Nasa rtlx as a novel assessment for determining cognitive load and user acceptance of expert and user-based evaluation methods exemplified through a mhealth diabetes self-management application evaluation. In: pHealth, pp. 185– 190 (2019). https://doi.org/10.3233/978-1-61499-975-1-185
-
[8]
IEEE Transactions on Robotics pp
Jorda, M., Vulliez, M., Khatib, O.: Local autonomy-based haptic-robot interaction with dual-proxy model. IEEE Transactions on Robotics pp. 2943–2961 (2022). https://doi.org/10.1109/TRO.2022.3160053
-
[9]
Yoon, H.-S., Hwang, J.-H., Kim, C., Son, E
Joseph,L.,Pickard,J.,Padois,V.,Daney,D.:Onlinevelocityconstraintadaptation for safe and efficient human-robot workspace sharing. IEEE Robot. Autom. Lett. pp. 11045–11051 (2020).https://doi.org/10.1109/IROS45743.2020.9340961
-
[10]
Li, M., Kapoor, A., Taylor, R.: A constrained optimization approach to virtual fixtures. In: IEEE/RSJ IROS. pp. 1408–1413 (2005).https://doi.org/10.1109/ IROS.2005.1545420
arXiv 2005
-
[11]
Muir, B., Moray, N.: Trust in automation. part ii. experimental studies of trust and human intervention in a process control simulation. Ergonomics pp. 429–460 (1996). https://doi.org/10.1080/00140139608964474
-
[12]
In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp
Mühlbauer, M., Steinmetz, F., Stulp, F., Hulin, T., Albu-Schäffer, A.: Multi-phase multi-modal haptic teleoperation. In: IEEE/RSJ IROS. pp. 7734–7741 (2022). https://doi.org/10.1109/IROS47612.2022.9981525
-
[13]
Nikolaidis, S., Zhu, Y., Hsu, D., Srinivasa, S.: Human-robot mutual adaptation in shared autonomy. In: ACM/IEEE HRI. pp. 294–302 (2017).https://doi.org/10. 1145/2909824.3020252
arXiv 2017
-
[14]
In: Proc
Olsen, D., Goodrich, M.: Metrics for evaluating human-robot interactions. In: Proc. PERMIS (2003)
2003
-
[15]
Prewett, M., Johnson, R., Saboe, K., Elliott, L., Coovert, M.: Managing workload in human-robot interaction: A review of empirical studies. Comput. Hum. Behav. pp. 840–856 (2010).https://doi.org/10.1016/j.chb.2010.03.010
-
[16]
Raiola, G., Restrepo, S., Chevalier, P., Rodriguez-Ayerbe, P., Lamy, X., Tliba, S., Stulp, F.: Co-manipulation with a library of virtual guiding fixtures. Auton. Robots pp. 1037–1051 (2018).https://doi.org/10.1007/s10514-017-9680-7
-
[17]
Rosenberg, L.: Virtual fixtures: Perceptual tools for telerobotic manipulation. In: IEEE VR. pp. 76–82 (1993).https://doi.org/10.1109/VRAIS.1993.380795 Selecting haptic guidance models in teleoperation 17
-
[18]
Shi, C., Madera, J., Boyea, H., Fey, A.: Haptic guidance using a transformer-based surgeon-side trajectory prediction algorithm for robot-assisted surgical training. In: IEEE RO-MAN. pp. 1942–1949 (2023).https://doi.org/10.1109/RO-MAN57019. 2023.10309357
-
[19]
Sánchez Restrepo, S., Raiola, G., Guerry, J., D’Elia, E., Lamy, X., Sidobre, D.: Toward an intuitive and iterative 6d virtual guide programming framework for assisted human–robot comanipulation. Robotica pp. 1778–1806 (2020).https:// doi.org/10.1017/S0263574720000016
-
[20]
Zanchettin, A., Ceriani, N., Rocco, P., Ding, H., Matthias, B.: Safety in human- robot collaborative manufacturing environments: Metrics and control. IEEE Trans. Autom. Sci. Eng. pp. 882–893 (2016). https://doi.org/10.1109/TASE.2015. 2412256
-
[21]
In: Advances in Service and Industrial Robotics
Žlajpah, L., Petrič, T.: Virtual guides for redundant robots using admittance con- trol for path tracking tasks. In: Advances in Service and Industrial Robotics. pp. 13–23 (2019).https://doi.org/10.1007/978-3-030-00232-9_2
-
[22]
Zolotas, M., Wonsick, M., Long, P., Padır, T.: Motion polytopes in virtual reality for shared control in remote manipulation applications. Front. Robot. AI (2021). https://doi.org/10.3389/frobt.2021.730433
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.