Search-Based Spatiotemporal and Multi-Robot Motion Planning on Graphs of Space-Time Convex Sets
Pith reviewed 2026-07-02 11:53 UTC · model grok-4.3
The pith
Graphs of space-time convex sets turn time-optimal multi-robot planning into graph search combined with motion optimization inside the sets.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Time-optimal planning on graphs of space-time convex sets is solved by casting it as a graph-search problem over path-indexed states, where a best-first search evaluates partial paths through continuous trajectory optimization inside the selected convex sets, guided by admissible heuristics and dominance checks, while an exact convex decomposition reserves trajectory occupancies to handle dynamic obstacles and multi-robot interactions in a unified way.
What carries the argument
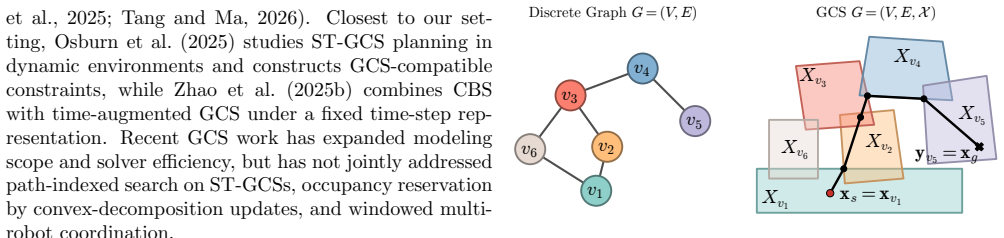
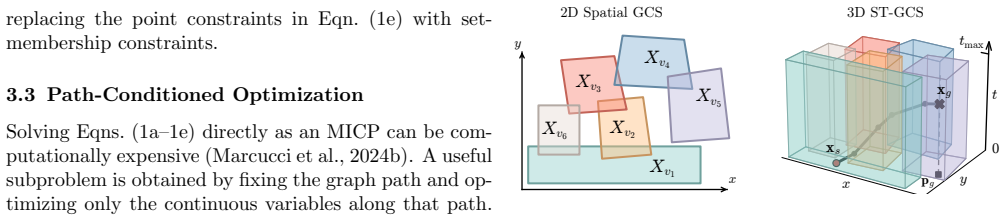
Graphs of space-time convex sets (ST-GCSs), where each vertex is a convex set in space-time and trajectories are formed by a discrete path on the graph plus a continuous motion contained inside the chosen sets.
If this is right
- Planning reduces to best-first search over path-indexed states evaluated by embedded continuous optimization.
- Exact convex decomposition supplies a uniform mechanism for reserving space-time for both dynamic obstacles and other robots.
- Prioritized planning augmented with windowed coordination scales the method to instances with 100 robots.
- The approach maintains solution quality in narrow and transient feasible regions where prior methods slow down.
Where Pith is reading between the lines
- The same convex-set graph structure could support replanning loops that update only the affected sets when new obstacles appear.
- Dominance checks inside the search might transfer to other problems that mix discrete sequencing with continuous timing.
- The decomposition step suggests a route for incorporating sensor uncertainty by enlarging the convex sets conservatively.
Load-bearing premise
Feasible collision-free regions in space-time can be represented as convex sets with no important loss of connectivity or volume.
What would settle it
An environment containing a feasible non-convex trajectory in space-time for which the exact convex decomposition produces disconnected sets that block all graph paths.
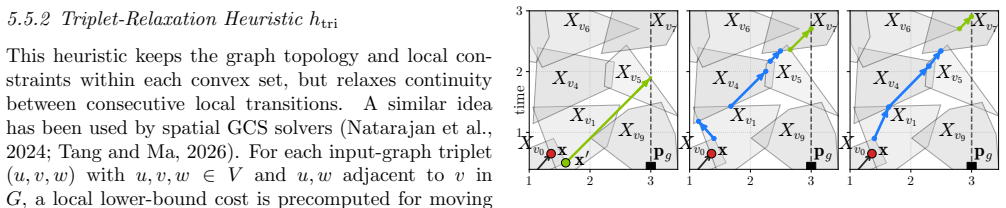
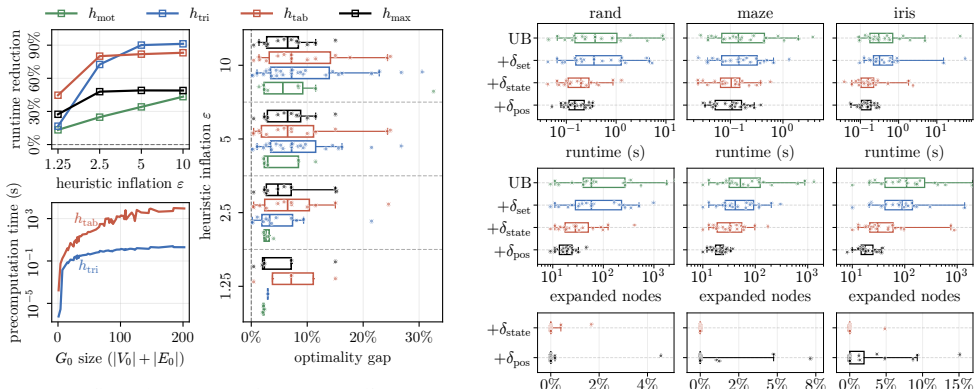
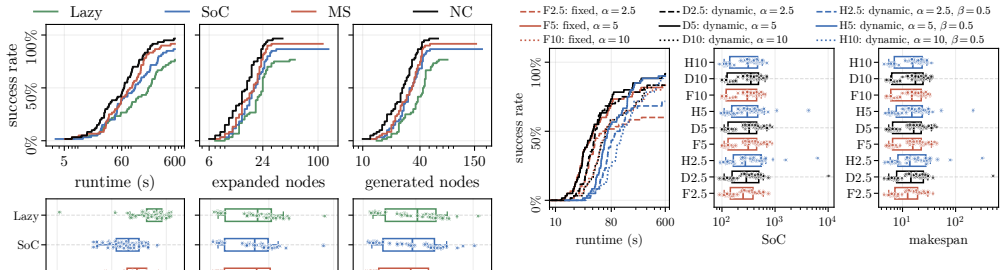
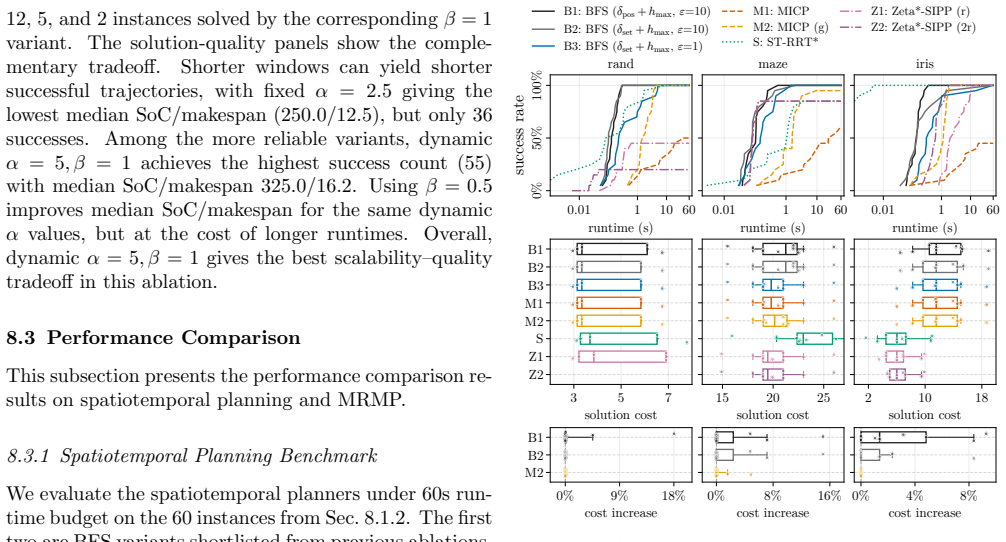
Figures




read the original abstract
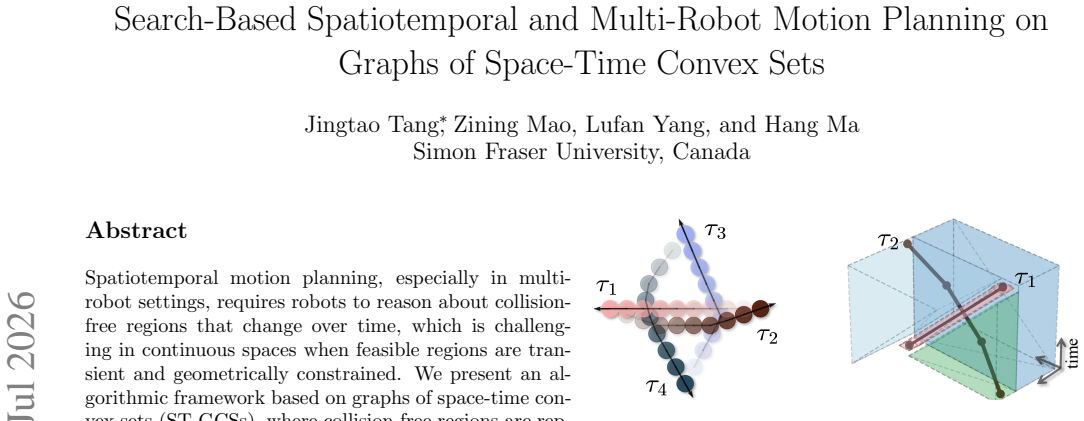
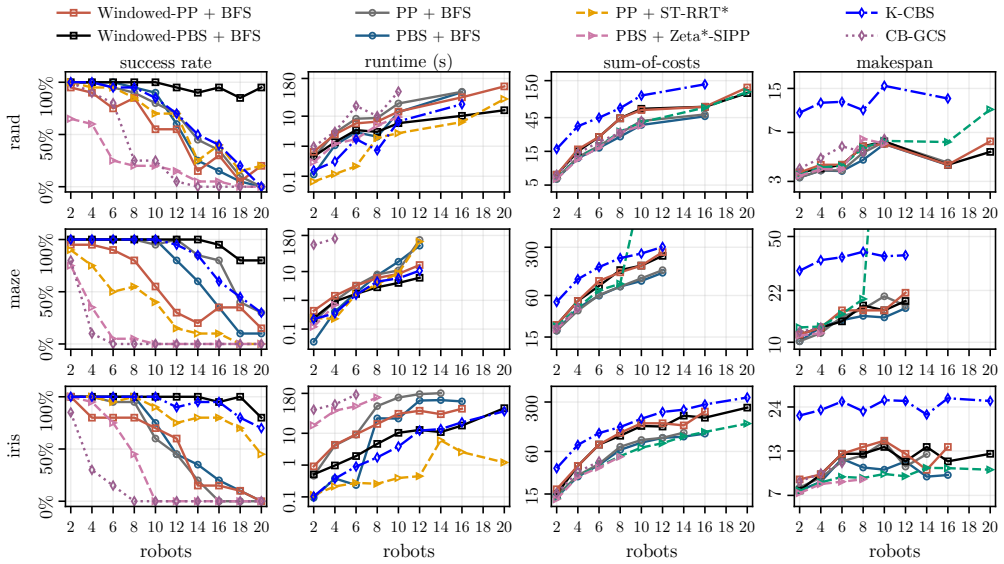
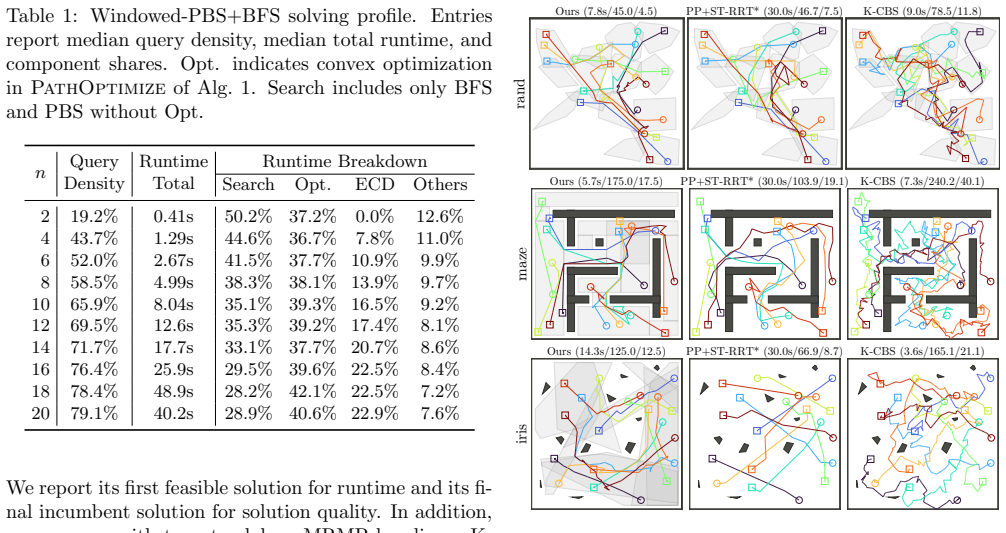
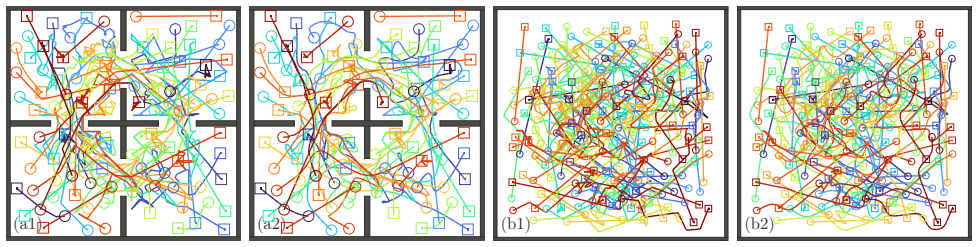
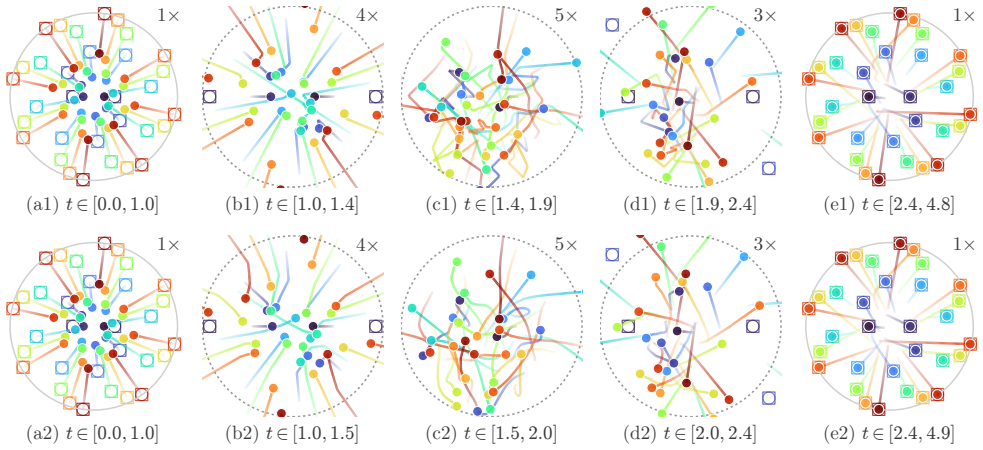
Spatiotemporal motion planning, especially in multi-robot settings, requires robots to reason about collision-free regions that change over time, which is challenging in continuous spaces when feasible regions are transient and geometrically constrained. We present an algorithmic framework based on graphs of space-time convex sets (ST-GCSs), where collision-free regions are represented as convex sets in space-time and trajectories correspond to paths on the graph together with continuous motions within the selected sets. We formulate time-optimal planning on ST-GCSs as a graph-search problem over path-indexed states and develop a best-first search solver that evaluates partial paths via continuous trajectory optimization, guided by admissible heuristics and dominance checks. We further present an Exact Convex Decomposition (ECD) scheme to reserve trajectory occupancies in space-time, enabling unified handling of dynamic obstacles and multi-robot interactions. For multi-robot motion planning, we integrate ST-GCS planning and ECD into prioritized planning methods and introduce a windowed coordination scheme to improve efficiency. Extensive experiments on single-robot and multi-robot problems demonstrate substantial speedups over various planners while maintaining high solution quality, particularly in environments with narrow and transient feasible regions. Large-scale demonstrations further show that the proposed multi-robot motion planner can solve instances with up to $100$ robots within only a few minutes. Project homepage: https://sites.google.com/view/stgcs
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an algorithmic framework for spatiotemporal and multi-robot motion planning based on graphs of space-time convex sets (ST-GCS). Collision-free regions are represented as convex sets in space-time; trajectories are paths on the resulting graph together with continuous motions inside the selected sets. Time-optimal planning is cast as a best-first graph search that invokes continuous trajectory optimization on partial paths, using admissible heuristics and dominance pruning. An Exact Convex Decomposition (ECD) scheme reserves trajectory occupancies to handle dynamic obstacles and inter-robot collisions in a unified way. The approach is integrated into prioritized planning with an additional windowed coordination layer. Experiments report substantial speedups relative to baseline planners and demonstrate scalability to 100-robot instances in environments with narrow, transient feasible regions.
Significance. If the reported performance holds under the stated assumptions, the framework supplies a practical method for combining discrete search over space-time convex decompositions with continuous optimization, which is particularly relevant for dynamic multi-robot settings. The explicit use of convexity in space-time and the ECD construction for occupancy reservation are technically interesting and could influence subsequent work on time-varying motion planning. The large-scale experimental demonstrations constitute a concrete strength.
major comments (1)
- [Abstract, framework description] Abstract and framework description (ST-GCS + ECD): the central construction assumes that every collision-free space-time region admits an exact convex decomposition whose union recovers the original feasible set without loss. No formal statement or proof of completeness for the ECD scheme is provided for general non-convex, time-varying geometries (e.g., narrow transient corridors created by moving obstacles). This assumption is load-bearing for both the claimed completeness of the graph-search procedure and the reported scalability to 100 robots; if ECD is inexact on some instances, the speedups rest on favorable test cases rather than a general guarantee.
minor comments (2)
- Notation for the ST-GCS graph and path-indexed states could be introduced more explicitly with a small running example before the search algorithm is presented.
- The experimental section would benefit from an explicit statement of the environments in which ECD produced an exact decomposition versus those in which it was approximate.
Simulated Author's Rebuttal
We thank the referee for their detailed review and for highlighting an important aspect of the ECD construction. We address the single major comment below and will incorporate revisions to strengthen the formal grounding of the framework.
read point-by-point responses
-
Referee: [Abstract, framework description] Abstract and framework description (ST-GCS + ECD): the central construction assumes that every collision-free space-time region admits an exact convex decomposition whose union recovers the original feasible set without loss. No formal statement or proof of completeness for the ECD scheme is provided for general non-convex, time-varying geometries (e.g., narrow transient corridors created by moving obstacles). This assumption is load-bearing for both the claimed completeness of the graph-search procedure and the reported scalability to 100 robots; if ECD is inexact on some instances, the speedups rest on favorable test cases rather than a general guarantee.
Authors: We agree that an explicit formal statement and proof of completeness for the Exact Convex Decomposition (ECD) would strengthen the manuscript. The ECD procedure is constructed so that the union of the resulting space-time convex sets exactly recovers the input feasible region (by iteratively extracting maximal convex subsets while preserving the complement), which underpins both the completeness of the subsequent graph search and the correctness of occupancy reservation for dynamic obstacles and inter-robot collisions. However, the current manuscript presents the construction and its algorithmic use without a dedicated theorem or proof sketch covering arbitrary non-convex, time-varying geometries. In the revised version we will add a new subsection (or appendix) that states the completeness claim formally and supplies a proof outline, including the handling of narrow transient corridors. This revision will make the load-bearing assumption explicit and will not alter the experimental results or algorithmic claims. revision: yes
Circularity Check
No circularity: direct algorithmic construction with independent definitions
full rationale
The paper presents a new framework (ST-GCS graphs, best-first search with trajectory optimization, ECD scheme, prioritized planning with windowed coordination) defined from first principles in the abstract and framework sections. No equations reduce fitted parameters to predictions, no self-citations bear load on core claims, and no ansatz or uniqueness results are imported from prior author work. Central results rest on explicit graph construction, search, and decomposition definitions that are externally falsifiable via implementation and benchmarks; experiments report empirical speedups without statistical forcing from inputs. This matches the default non-circular case for algorithmic papers.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Collision-free regions admit representation as convex sets in space-time
- standard math Best-first search with admissible heuristics and dominance checks yields time-optimal solutions when combined with continuous optimization
invented entities (2)
-
Graph of Space-Time Convex Sets (ST-GCS)
no independent evidence
-
Exact Convex Decomposition (ECD)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Artificial Intelligence , volume=
Multi-agent pathfinding with continuous time , author=. Artificial Intelligence , volume=. 2022 , publisher=
2022
-
[2]
International Symposium on Combinatorial Search , pages=
Optimal and bounded-suboptimal multi-agent motion planning , author=. International Symposium on Combinatorial Search , pages=
-
[3]
Artificial intelligence , volume=
Subdimensional expansion for multirobot path planning , author=. Artificial intelligence , volume=. 2015 , publisher=
2015
-
[4]
The International Journal of Robotics Research , volume=
Finding a needle in an exponential haystack: Discrete RRT for exploration of implicit roadmaps in multi-robot motion planning , author=. The International Journal of Robotics Research , volume=. 2016 , publisher=
2016
-
[5]
Algorithmica , volume=
On multiple moving objects , author=. Algorithmica , volume=. 1987 , publisher=
1987
-
[6]
SIAM Journal on Optimization , volume=
Shortest paths in graphs of convex sets , author=. SIAM Journal on Optimization , volume=. 2024 , publisher=
2024
-
[7]
Science robotics , volume=
Motion planning around obstacles with convex optimization , author=. Science robotics , volume=. 2023 , publisher=
2023
-
[8]
IEEE Transactions on Automatic Control , volume=
Time-optimal path tracking for robots: A convex optimization approach , author=. IEEE Transactions on Automatic Control , volume=. 2009 , publisher=
2009
-
[9]
Proceedings of the AAAI conference on artificial intelligence , volume=
Searching with consistent prioritization for multi-agent path finding , author=. Proceedings of the AAAI conference on artificial intelligence , volume=
-
[10]
arXiv preprint arXiv:2409.17079 , year=
Collision-free time-optimal path parameterization for multi-robot teams , author=. arXiv preprint arXiv:2409.17079 , year=
-
[11]
IEEE Robotics and Automation Letters , volume=
Prioritized safe interval path planning for multi-agent pathfinding with continuous time on 2D roadmaps , author=. IEEE Robotics and Automation Letters , volume=. 2022 , publisher=
2022
-
[12]
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
T-prm: Temporal probabilistic roadmap for path planning in dynamic environments , author=. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2022 , organization=
2022
-
[13]
2022 International Conference on Robotics and Automation (ICRA) , pages=
St-rrt*: Asymptotically-optimal bidirectional motion planning through space-time , author=. 2022 International Conference on Robotics and Automation (ICRA) , pages=. 2022 , organization=
2022
-
[14]
Journal of the ACM (JACM) , volume=
Integer programming formulation of traveling salesman problems , author=. Journal of the ACM (JACM) , volume=. 1960 , publisher=
1960
-
[15]
Algorithmic Foundations of Robotics XI: Selected Contributions of the Eleventh International Workshop on the Algorithmic Foundations of Robotics , pages=
Computing large convex regions of obstacle-free space through semidefinite programming , author=. Algorithmic Foundations of Robotics XI: Selected Contributions of the Eleventh International Workshop on the Algorithmic Foundations of Robotics , pages=. 2015 , organization=
2015
-
[16]
2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Approximating robot configuration spaces with few convex sets using clique covers of visibility graphs , author=. 2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2024 , organization=
2024
-
[17]
The International Journal of Robotics Research , volume=
Certified polyhedral decompositions of collision-free configuration space , author=. The International Journal of Robotics Research , volume=. 2024 , publisher=
2024
-
[18]
IEEE transactions on Robotics and Automation , volume=
Probabilistic roadmaps for path planning in high-dimensional configuration spaces , author=. IEEE transactions on Robotics and Automation , volume=. 1996 , publisher=
1996
-
[19]
The international journal of robotics research , volume=
Sampling-based algorithms for optimal motion planning , author=. The international journal of robotics research , volume=. 2011 , publisher=
2011
-
[20]
Research Report 9811 , year=
Rapidly-exploring random trees: A new tool for path planning , author=. Research Report 9811 , year=
-
[21]
Proceedings 2000 ICRA
RRT-connect: An efficient approach to single-query path planning , author=. Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065) , volume=. 2000 , organization=
2000
-
[22]
Chia, Shao Yuan Chew and Jiang, Rebecca H and Graesdal, Bernhard Paus and Kaelbling, Leslie Pack and Tedrake, Russ , journal=
-
[23]
Robotics: Science and Systems (RSS) , year =
Natarajan, Ramkumar and Liu, Chaoqi and Choset, Howie and Likhachev, Maxim , title =. Robotics: Science and Systems (RSS) , year =
-
[24]
arXiv preprint arXiv:2409.19543 , year=
Multi-query shortest-path problem in graphs of convex sets , author=. arXiv preprint arXiv:2409.19543 , year=
-
[25]
arXiv preprint arXiv:2507.10878 , year=
Mixed discrete and continuous planning using shortest walks in graphs of convex sets , author=. arXiv preprint arXiv:2507.10878 , year=
-
[26]
IEEE Robotics and Automation Letters , year=
Planning shorter paths in graphs of convex sets by undistorting parametrized configuration spaces , author=. IEEE Robotics and Automation Letters , year=
-
[27]
IEEE Transactions on Robotics , year=
Plan Optimal Collision-Free Trajectories With Non-Convex Cost Functions Using Graphs of Convex Sets , author=. IEEE Transactions on Robotics , year=
-
[28]
IEEE Transactions on Robotics , year=
Fast path planning through large collections of safe boxes , author=. IEEE Transactions on Robotics , year=
-
[29]
The International Journal of Robotics Research , pages=
Non-Euclidean motion planning with graphs of geodesically convex sets , author=. The International Journal of Robotics Research , pages=. 2023 , publisher=
2023
-
[30]
IEEE Transactions on Robotics , year=
Temporal logic motion planning with convex optimization via graphs of convex sets , author=. IEEE Transactions on Robotics , year=
-
[31]
The international journal of robotics research , volume=
Time-optimal control of robotic manipulators along specified paths , author=. The international journal of robotics research , volume=. 1985 , publisher=
1985
-
[32]
Proceedings of the International Symposium on Combinatorial Search , volume=
Multi-agent pathfinding: Definitions, variants, and benchmarks , author=. Proceedings of the International Symposium on Combinatorial Search , volume=
-
[33]
2011 IEEE International Conference on Robotics and Automation , pages=
Motion planning for autonomous driving with a conformal spatiotemporal lattice , author=. 2011 IEEE International Conference on Robotics and Automation , pages=. 2011 , organization=
2011
-
[34]
, author=
High Performance State Lattice Planning Using Heuristic Look-Up Tables. , author=. IROS , pages=. 2006 , organization=
2006
-
[35]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Structure and intractability of optimal multi-robot path planning on graphs , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[36]
Multi-Agent Motion Planning with B
Yan, Jingtian and Li, Jiaoyang , journal=. Multi-Agent Motion Planning with B. 2024 , publisher=
2024
-
[37]
Artificial intelligence , volume=
Conflict-based search for optimal multi-agent pathfinding , author=. Artificial intelligence , volume=. 2015 , publisher=
2015
-
[38]
Proceedings of the aaai conference on artificial intelligence and interactive digital entertainment , volume=
Cooperative pathfinding , author=. Proceedings of the aaai conference on artificial intelligence and interactive digital entertainment , volume=
-
[39]
IEEE Robotics and Automation Letters , volume=
Representation-optimal multi-robot motion planning using conflict-based search , author=. IEEE Robotics and Automation Letters , volume=. 2021 , publisher=
2021
-
[40]
Proceedings of the International Conference on Automated Planning and Scheduling , volume=
Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences , author=. Proceedings of the International Conference on Automated Planning and Scheduling , volume=
-
[41]
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Conflict-based search for multi-robot motion planning with kinodynamic constraints , author=. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2022 , organization=
2022
-
[42]
arXiv preprint arXiv:2404.01752 , year=
Safe Interval RRT* for Scalable Multi-Robot Path Planning in Continuous Space , author=. arXiv preprint arXiv:2404.01752 , year=
-
[43]
2011 IEEE international conference on robotics and automation , pages=
Sipp: Safe interval path planning for dynamic environments , author=. 2011 IEEE international conference on robotics and automation , pages=. 2011 , organization=
2011
-
[44]
2014 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Time-based RRT algorithm for rendezvous planning of two dynamic systems , author=. 2014 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2014 , organization=
2014
-
[45]
Robotic Manipulation
Tedrake, Russ. Robotic Manipulation
-
[46]
Drake: Model-based design and verification for robotics
Russ Tedrake and the Drake Development Team. Drake: Model-based design and verification for robotics
-
[47]
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Using Graphs of Convex Sets to Guide Nonconvex Trajectory Optimization , author=. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2024 , organization=
2024
-
[48]
1997 , publisher=
Introduction to linear optimization , author=. 1997 , publisher=
1997
-
[49]
2025 , eprint=
Reevaluation of Large Neighborhood Search for MAPF: Findings and Opportunities , author=. 2025 , eprint=
2025
-
[50]
Edsger Wybe Dijkstra: his life, work, and legacy , pages=
A note on two problems in connexion with graphs , author=. Edsger Wybe Dijkstra: his life, work, and legacy , pages=. 2022 , publisher=
2022
-
[51]
Optimization Methods and Software , volume=
A general system for heuristic minimization of convex functions over non-convex sets , author=. Optimization Methods and Software , volume=. 2018 , publisher=
2018
-
[52]
2024 , school=
Graphs of convex sets with applications to optimal control and motion planning , author=. 2024 , school=
2024
-
[53]
arXiv preprint arXiv:2407.17413 , year=
A* for Graphs of Convex Sets , author=. arXiv preprint arXiv:2407.17413 , year=
-
[54]
2019 IEEE 58th conference on decision and control (CDC) , pages=
Linear encodings for polytope containment problems , author=. 2019 IEEE 58th conference on decision and control (CDC) , pages=. 2019 , organization=
2019
-
[55]
2023 , publisher=
Lu, Junjie and Zeng, Bi and Tang, Jingtao and Lam, Tin Lun and Wen, Junbin , journal=. 2023 , publisher=
2023
-
[56]
1973 , publisher=
Regular polytopes , author=. 1973 , publisher=
1973
-
[57]
Space-Time Graphs of Convex Sets for Multi-Robot Motion Planning , year=
Tang, Jingtao and Mao, Zining and Yang, Lufan and Ma, Hang , booktitle=. Space-Time Graphs of Convex Sets for Multi-Robot Motion Planning , year=
-
[58]
arXiv preprint arXiv:2508.10203 , year=
Systematic Constraint Formulation and Collision-Free Trajectory Planning Using Space-Time Graphs of Convex Sets , author=. arXiv preprint arXiv:2508.10203 , year=
-
[59]
2011 , month = jan, day =
Jamis Buck , title =. 2011 , month = jan, day =
2011
-
[60]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
GHOST: Solving the Traveling Salesman Problem on Graphs of Convex Sets , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[61]
2025 IEEE 21st International Conference on Automation Science and Engineering (CASE) , pages=
CB-GCS: Conflict-based search on the graph of convex sets for multi-agent motion planning , author=. 2025 IEEE 21st International Conference on Automation Science and Engineering (CASE) , pages=. 2025 , organization=
2025
-
[62]
2020 , url =
Artificial Intelligence: A Modern Approach (4th Edition) , author =. 2020 , url =
2020
-
[63]
Robotics and autonomous systems , volume=
Coordinated path planning for multiple robots , author=. Robotics and autonomous systems , volume=. 1998 , publisher=
1998
-
[64]
Autonomous Robots , volume=
drrt*: Scalable and informed asymptotically-optimal multi-robot motion planning , author=. Autonomous Robots , volume=. 2020 , publisher=
2020
-
[65]
2005 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=
Prioritized motion planning for multiple robots , author=. 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=. 2005 , organization=
2005
-
[66]
IEEE Robotics and Automation Letters , volume=
Adaptive robot coordination: A subproblem-based approach for hybrid multi-robot motion planning , author=. IEEE Robotics and Automation Letters , volume=. 2024 , publisher=
2024
-
[67]
IEEE Robotics and Automation Letters , year=
Scalable Multi-Robot Motion Planning Using Workspace Guidance-Informed Hypergraphs , author=. IEEE Robotics and Automation Letters , year=
-
[68]
IEEE Robotics and Automation Letters , year=
K-ARC: Adaptive Robot Coordination for Multi-Robot Kinodynamic Planning , author=. IEEE Robotics and Automation Letters , year=
-
[69]
IEEE Transactions on Robotics , volume=
MADER: Trajectory planner in multiagent and dynamic environments , author=. IEEE Transactions on Robotics , volume=. 2021 , publisher=
2021
-
[70]
2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Conflict-based model predictive control for scalable multi-robot motion planning , author=. 2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2024 , organization=
2024
-
[71]
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Mixed integer conic programming for multi-agent motion planning in continuous space , author=. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2025 , organization=
2025
-
[72]
IEEE Robotics and Automation Letters , year=
CP-MILP: Mixed Integer Linear Programming for Multi-Agent Motion Planning with Linear Dynamics , author=. IEEE Robotics and Automation Letters , year=
-
[73]
arXiv preprint arXiv:2510.22015 , year=
Motion Planning with Precedence Specifications via Augmented Graphs of Convex Sets , author=. arXiv preprint arXiv:2510.22015 , year=
-
[74]
arXiv preprint arXiv:2402.10312 , year=
Towards tight convex relaxations for contact-rich manipulation , author=. arXiv preprint arXiv:2402.10312 , year=
-
[75]
arXiv preprint arXiv:2504.10783 , year=
Superfast configuration-space convex set computation on GPUs for online motion planning , author=. arXiv preprint arXiv:2504.10783 , year=
-
[76]
arXiv preprint arXiv:2504.18978 , year=
A biconvex method for minimum-time motion planning through sequences of convex sets , author=. arXiv preprint arXiv:2504.18978 , year=
-
[77]
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
A mixed-integer conic program for the moving-target traveling salesman problem based on a graph of convex sets , author=. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2024 , organization=
2024
-
[78]
2025 IEEE International Conference on Robotics and Automation (ICRA) , pages=
A Complete and Bounded-Suboptimal Algorithm for a Moving Target Traveling Salesman Problem with Obstacles in 3D , author=. 2025 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2025 , organization=
2025
-
[79]
, author=
Zeta*-SIPP: Improved Time-Optimal Any-Angle Safe-Interval Path Planning. , author=. IJCAI , pages=
-
[80]
Proceedings of the International Conference on Automated Planning and Scheduling , volume=
Safe interval randomized path planning for manipulators , author=. Proceedings of the International Conference on Automated Planning and Scheduling , volume=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.