From Extrinsic to Intrinsic: Geodesic-Guided Representation Learning for 3D Geometric Data
Pith reviewed 2026-06-28 15:30 UTC · model grok-4.3
The pith
PRISM recovers the intrinsic surface geodesic metric to learn isometric embeddings for 3D shapes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
PRISM learns isometric embeddings by recovering the intrinsic surface geodesic metric. It does so through a topology-enforcing objective that explicitly constrains the structure of the latent space, paired with a specialized two-stage training recipe that mitigates sample imbalance in geodesic distance distributions.
What carries the argument
The topology-enforcing objective, which constrains the latent space to recover geodesic distances between surface points.
If this is right
- The learned embeddings enable more accurate prediction of geodesic distances on 3D surfaces.
- Shape recognition accuracy improves when representations are guided by intrinsic rather than extrinsic geometry.
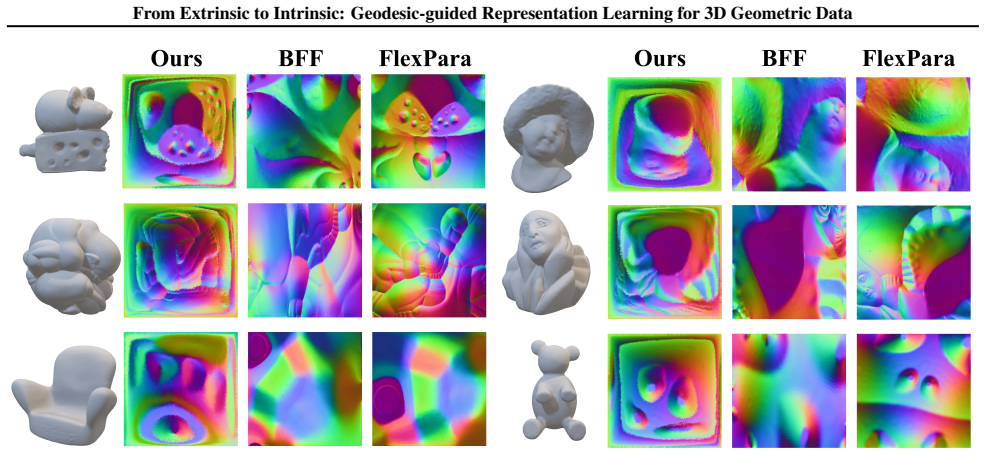
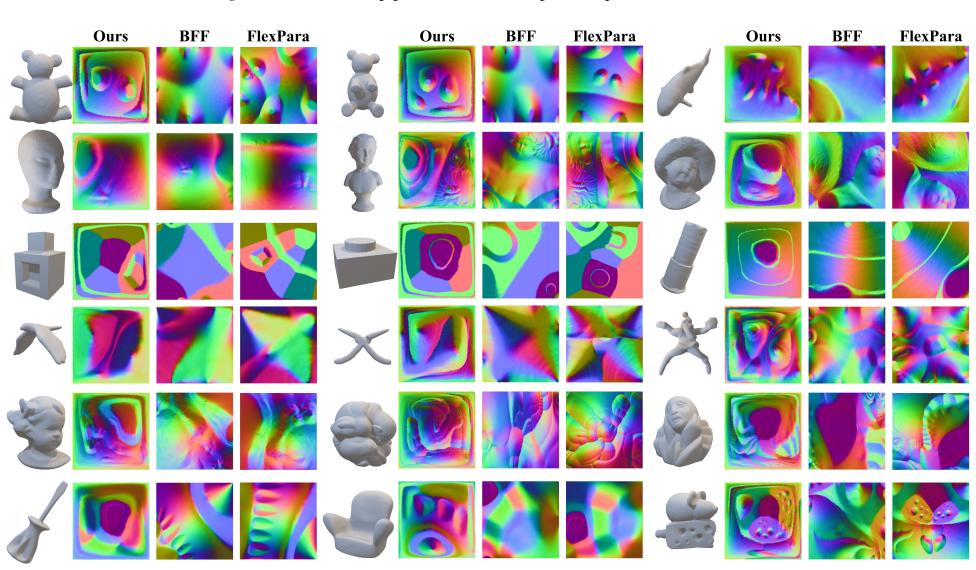
- Surface parameterization tasks benefit from the recovered manifold structure.
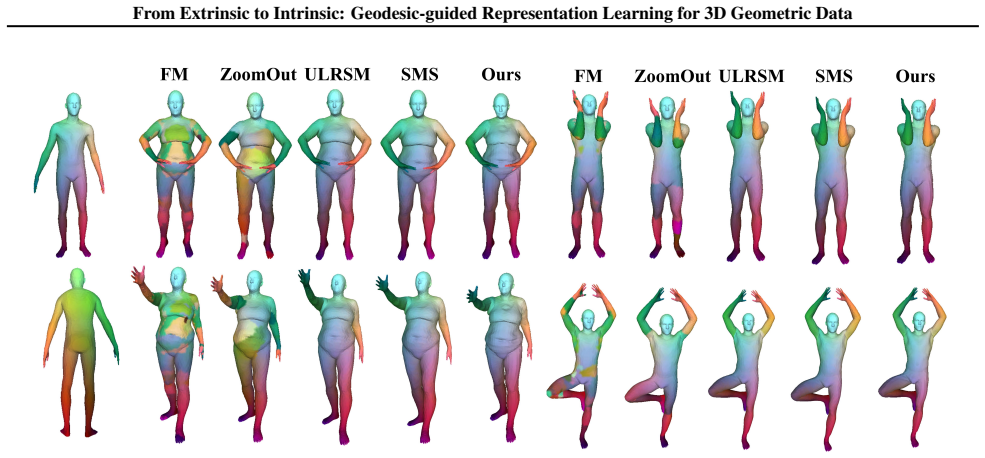
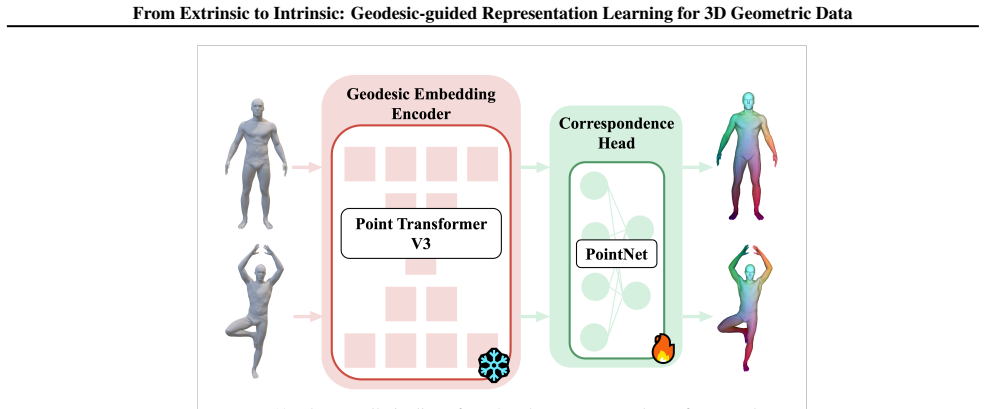
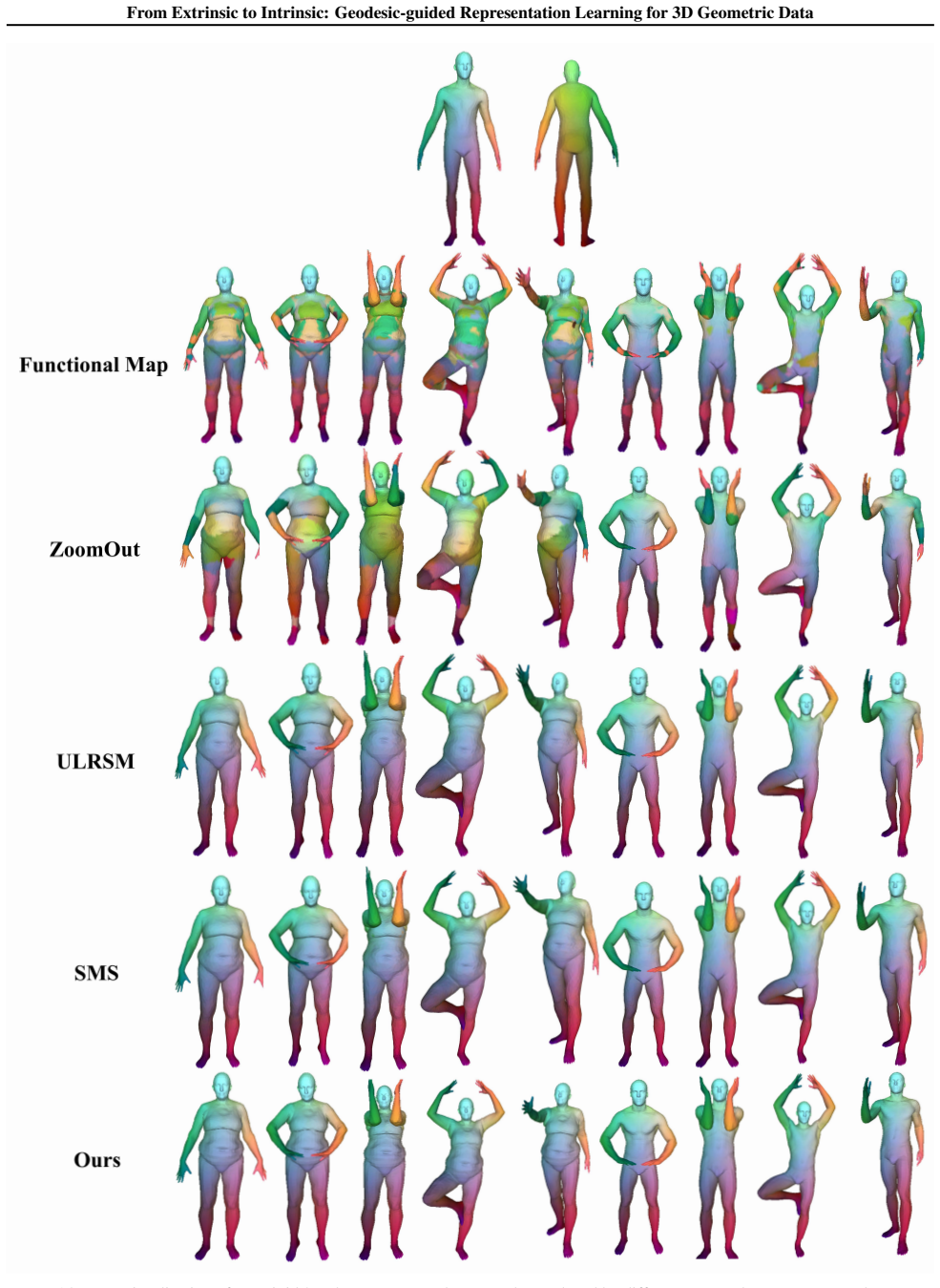
- Non-rigid correspondence between shapes becomes more reliable under the isometric constraint.
Where Pith is reading between the lines
- The same geodesic-recovery objective could be tested on non-Euclidean data such as graphs or meshes with holes to check whether topology preservation generalizes.
- If the approach scales, it may reduce reliance on large labeled datasets by providing a self-supervised signal rooted in surface geometry.
- Downstream applications in animation or medical imaging that require topology-preserving deformations could adopt the pre-trained embeddings directly.
Load-bearing premise
Explicitly constraining the latent space to recover geodesic distances captures the essence of shape identity and manifold topology better than extrinsic or semantic alternatives.
What would settle it
A controlled experiment in which models trained without the topology-enforcing objective achieve equal or better accuracy on geodesic prediction and the three downstream tasks would falsify the central claim.
Figures
read the original abstract
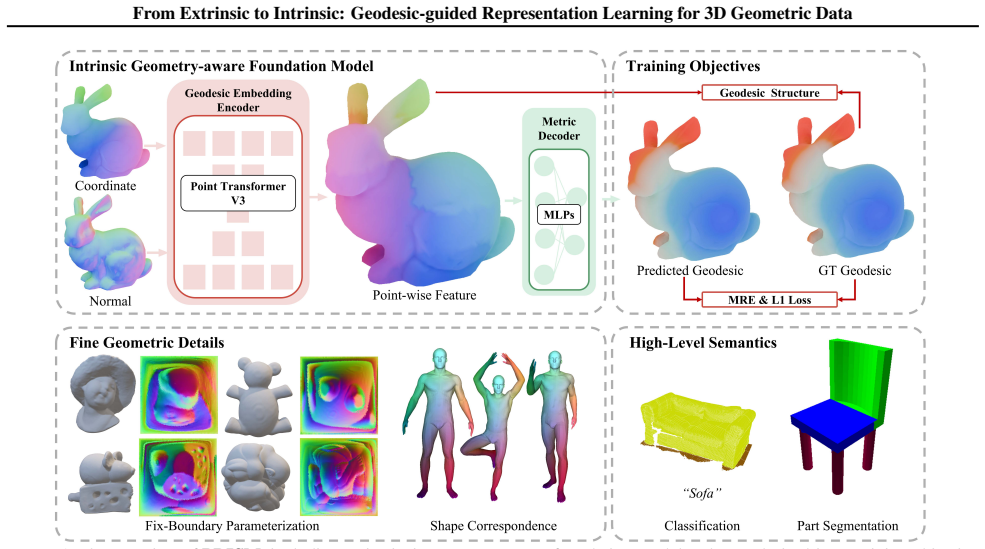
Geometric analysis fundamentally distinguishes between \textit{extrinsic} and \textit{intrinsic} perspectives. The dominant paradigm in current 3D representation learning relies on either extrinsic spatial structures or high-level semantics, struggling to capture the essence of shape identity and underlying manifold topology. To bridge this gap, we introduce a novel 3D representation learning paradigm, namely \textbf{PRISM}, for \textbf{P}re-training, which learns isometric embeddings by \textbf{R}ecovering the \textbf{I}ntrinsic \textbf{S}urface geodesic \textbf{M}etric. PRISM incorporates a topology-enforcing objective that explicitly constrains the structure of latent space, alongside a specialized two-stage training recipe mitigating sample imbalance inherent in the distribution of geodesic distances. Experiments demonstrate that our approach shows satisfactory accuracy, robustness, and high efficiency in geodesic distance prediction and achieves superior performance across diverse downstream tasks, including shape recognition, surface parameterization, and non-rigid correspondence. The code will be publicly available at https://github.com/AidenZhao/PRISM.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces PRISM, a pre-training paradigm for 3D geometric data that learns isometric embeddings by recovering the intrinsic surface geodesic metric. It employs a topology-enforcing objective to constrain latent space structure and a two-stage training recipe to address geodesic distance sample imbalance. Experiments claim strong accuracy and robustness in geodesic distance prediction along with superior results on downstream tasks including shape recognition, surface parameterization, and non-rigid correspondence.
Significance. If the central claims hold, the work could meaningfully advance intrinsic-geometry-aware representation learning for 3D data, moving beyond extrinsic or semantic baselines to better capture manifold topology. Public code release would further strengthen reproducibility.
major comments (2)
- [Abstract, §3] Abstract and §3 (method): The central claim that PRISM 'learns isometric embeddings by recovering the intrinsic surface geodesic metric' is load-bearing but unsupported by any embedding-dimension specification, isometry proof, distortion bound, or reference to embedding theorems. For general Riemannian surfaces, exact isometry into low-dimensional Euclidean space is impossible by the Nash embedding theorem; without analysis of the achieved distortion or the latent dimension used, downstream gains cannot be attributed to true isometry.
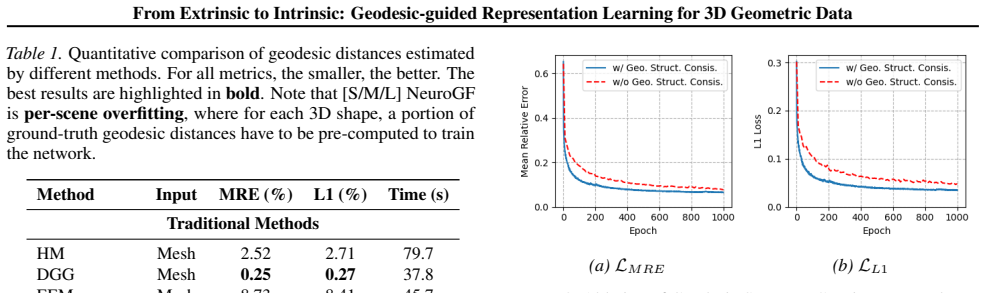
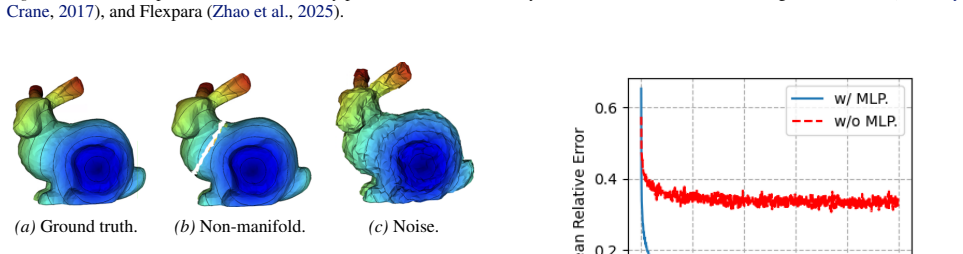
- [§4] §4 (experiments) and associated tables: No quantitative distortion analysis (e.g., mean relative error between predicted and ground-truth geodesic distances in latent space) or comparison against extrinsic baselines on the same metric-recovery task is reported. This leaves open whether the topology-enforcing objective actually recovers the metric or merely regularizes the latent space in a different way.
minor comments (2)
- [Abstract] Abstract: The phrase 'satisfactory accuracy' is vague; replace with concrete metrics (e.g., mean relative error) and dataset names.
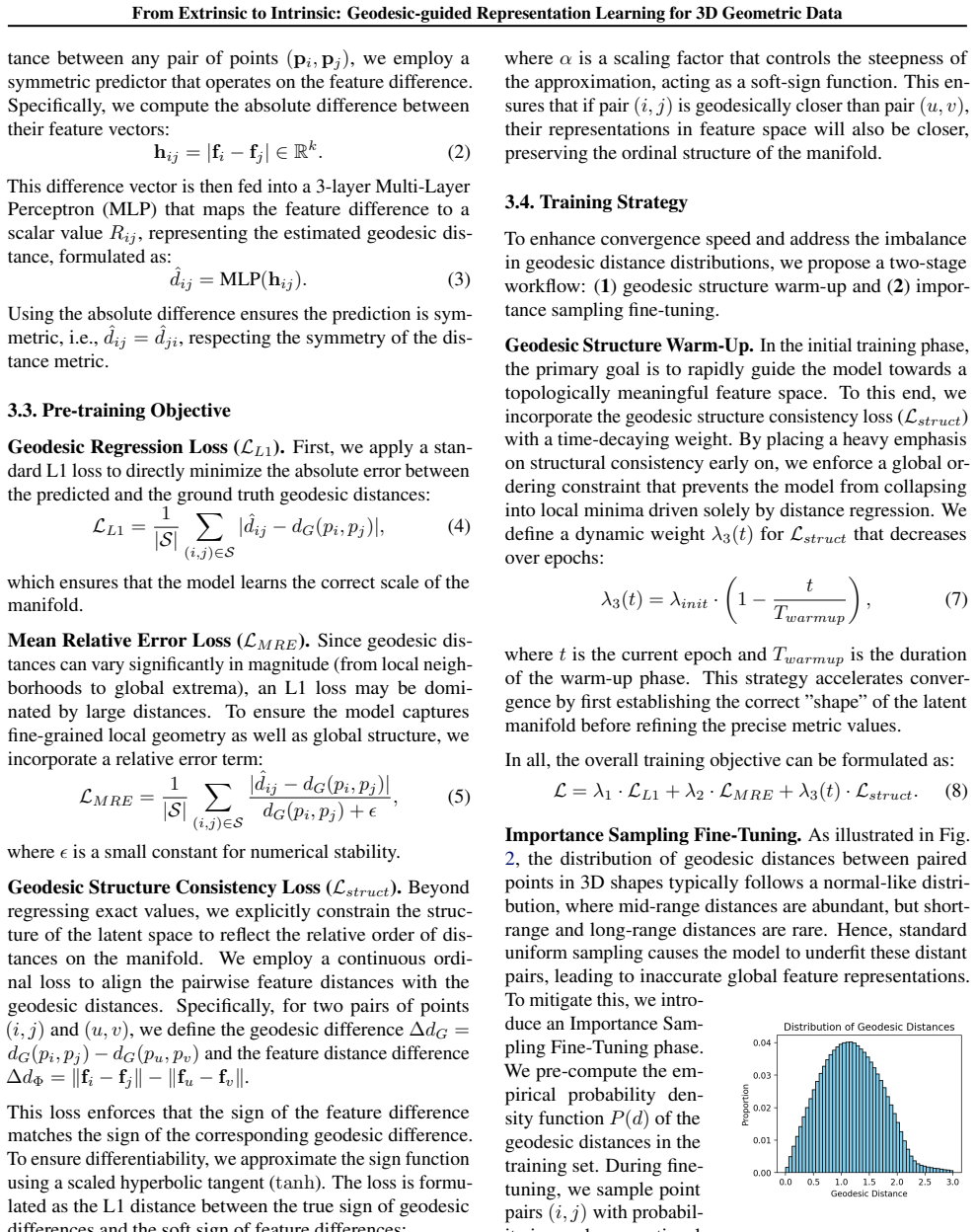
- [§3.3] Notation: The two-stage recipe is described at a high level; clarify the precise loss weighting schedule and how positive/negative geodesic pairs are sampled in each stage.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below with clarifications and proposed revisions. We agree that the language around isometry requires tempering and that additional quantitative analysis would strengthen the experimental section.
read point-by-point responses
-
Referee: [Abstract, §3] Abstract and §3 (method): The central claim that PRISM 'learns isometric embeddings by recovering the intrinsic surface geodesic metric' is load-bearing but unsupported by any embedding-dimension specification, isometry proof, distortion bound, or reference to embedding theorems. For general Riemannian surfaces, exact isometry into low-dimensional Euclidean space is impossible by the Nash embedding theorem; without analysis of the achieved distortion or the latent dimension used, downstream gains cannot be attributed to true isometry.
Authors: We acknowledge that the manuscript does not include a formal isometry proof, distortion bounds, or explicit reference to embedding theorems such as Nash's. Our use of 'isometric embeddings' describes the objective of the topology-enforcing loss, which encourages preservation of geodesic distances rather than asserting exact isometry into Euclidean space. We will revise the abstract and §3 to clarify this distinction (e.g., changing phrasing to 'learns embeddings that recover the intrinsic surface geodesic metric') and will explicitly state the latent dimension employed in the experiments. No proof or bounds will be added, as the work is empirical; the revisions will avoid implying mathematical exactness. revision: yes
-
Referee: [§4] §4 (experiments) and associated tables: No quantitative distortion analysis (e.g., mean relative error between predicted and ground-truth geodesic distances in latent space) or comparison against extrinsic baselines on the same metric-recovery task is reported. This leaves open whether the topology-enforcing objective actually recovers the metric or merely regularizes the latent space in a different way.
Authors: We agree that a direct quantitative distortion analysis on the metric-recovery task is missing and would help substantiate the contribution of the topology-enforcing objective. In the revised §4 we will add mean relative error (and related metrics) between latent-space distances and ground-truth geodesics, along with comparisons to extrinsic baselines on the same task. This will be presented in a new table or figure to demonstrate that the objective recovers the metric beyond generic regularization. revision: yes
Circularity Check
No significant circularity; derivation self-contained against external benchmarks
full rationale
The abstract presents PRISM as using a topology-enforcing objective to recover geodesic distances computed from input surfaces, with a two-stage training recipe. This is a standard supervised metric-learning setup rather than a self-definitional or fitted-input reduction. No equations, self-citations, uniqueness theorems, or ansatzes are quoted that would make the central isometric-embedding claim equivalent to its inputs by construction. The geodesic metric is an external input computed independently of the learned embedding, and downstream tasks are evaluated separately. No load-bearing circular steps are identifiable from the provided text.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
ISSN 0730-0301. doi: 10.1145/3592107. URL https://doi.org/10. 1145/3592107. Cao, D., Eisenberger, M., El Amrani, N., Cremers, D., and Bernard, F. Spectral meets spatial: Harmonising 3d shape matching and interpolation. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 3658–3668, June
-
[2]
ShapeNet: An Information-Rich 3D Model Repository
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P., Huang, Q., Li, Z., Savarese, S., Savva, M., Song, S., Su, H., et al. Shapenet: An information-rich 3d model repository.arXiv preprint arXiv:1512.03012,
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
Crane, K., Livesu, M., Puppo, E., and Qin, Y
doi: 10.1145/2516971.2516977. Crane, K., Livesu, M., Puppo, E., and Qin, Y . A survey of algorithms for geodesic paths and distances.CoRR, abs/2007.10430,
-
[4]
Guo, Z., Zhang, R., Qiu, L., Li, X., and Heng, P.-A
URL https://arxiv.org/ abs/2007.10430. Guo, Z., Zhang, R., Qiu, L., Li, X., and Heng, P.-A. Joint- mae: 2d-3d joint masked autoencoders for 3d point cloud pre-training.arXiv preprint arXiv:2302.14007,
-
[5]
The training process of many deep networks explores the same low-dimensional manifold
doi: 10.1073/pnas. 95.15.8431. Liu, L., Ye, C., Ni, R., and Fu, X.-M. Progressive parameter- izations.ACM Transactions on Graphics(SIGGRAPH), 37(4):41:1–41:12,
-
[6]
Zoomout: Spectral upsampling for efficient shape correspondence.arXiv preprint arXiv:1904.07865,
Melzi, S., Ren, J., Rodola, E., Sharma, A., Wonka, P., and Ovsjanikov, M. Zoomout: Spectral upsampling for efficient shape correspondence.arXiv preprint arXiv:1904.07865,
-
[7]
E., Liu, W., Tian, Y ., and Yuan, L
Pang, Y ., Wang, W., Tay, F. E., Liu, W., Tian, Y ., and Yuan, L. Masked autoencoders for point cloud self-supervised learning. InComputer Vision–ECCV 2022: 17th Euro- pean Conference, Tel Aviv, Israel, October 23–27, 2022, Proceedings, Part II, pp. 604–621. Springer,
2022
-
[8]
ISSN 0730-0301. doi: 10.1145/3243651. URL https:// doi.org/10.1145/3243651. Surazhsky, V ., Surazhsky, T., Kirsanov, D., Gortler, S. J., and Hoppe, H. Fast exact and approximate geodesics on meshes.ACM Transactions on Graphics, 24(3):553–560,
-
[9]
Tao, J., Zhang, J., Deng, B., Fang, Z., Peng, Y ., and He, Y
doi: 10.1145/1073204.1073228. Tao, J., Zhang, J., Deng, B., Fang, Z., Peng, Y ., and He, Y . Parallel and scalable heat methods for geodesic distance computation.IEEE Trans. Pattern Anal. Mach. Intell., 43(2):579–594, February
-
[10]
doi: 10.1109/TPAMI.2019.2933209
ISSN 0162-8828. doi: 10.1109/TPAMI.2019.2933209. URL https://doi. org/10.1109/TPAMI.2019.2933209. Uy, M. A., Pham, Q.-H., Hua, B.-S., Nguyen, T., and Yeung, S.-K. Revisiting point cloud classification: A new bench- mark dataset and classification model on real-world data. InProceedings of the IEEE/CVF international conference on computer vision, pp. 1588–1597,
-
[11]
doi: 10.1109/TPAMI.2025. 3628727. Zheng, X., Huang, X., Mei, G., Hou, Y ., Lyu, Z., Dai, B., Ouyang, W., and Gong, Y . Point cloud pre-training with diffusion models. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 22935–22945,
-
[12]
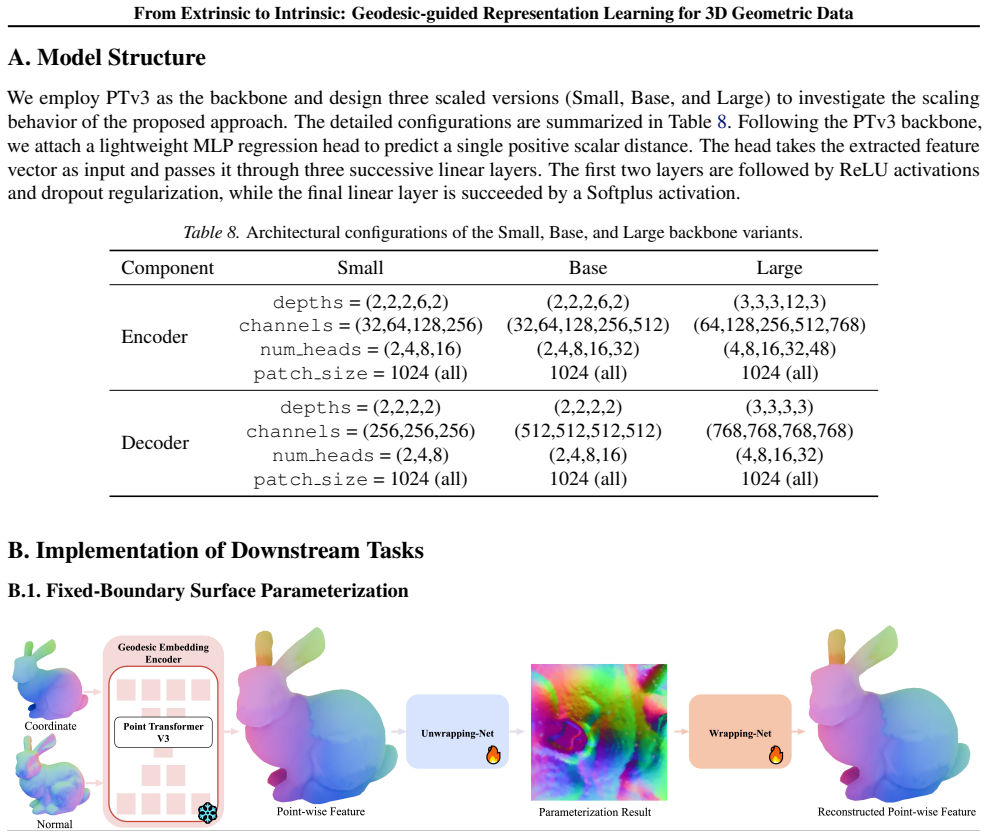
Regarding the loss functions, following FlexPara, we employ a consistency loss to constrain the reconstruction quality after wrapping, and an isometric loss to regularize the deformation in the UV space. Additionally, since this is a fixed-boundary task, we introduce an extra Chamfer Distance (CD) lossL w between the predicted UV shape and a regular grid ...
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.