Multi-UAV Active Sensing with Information Gain-based Planning and Belief Fusion
Pith reviewed 2026-06-27 13:15 UTC · model grok-4.3
The pith
Information-gain path planning with belief fusion maps terrain more accurately than random or sweep methods in multi-UAV tests.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
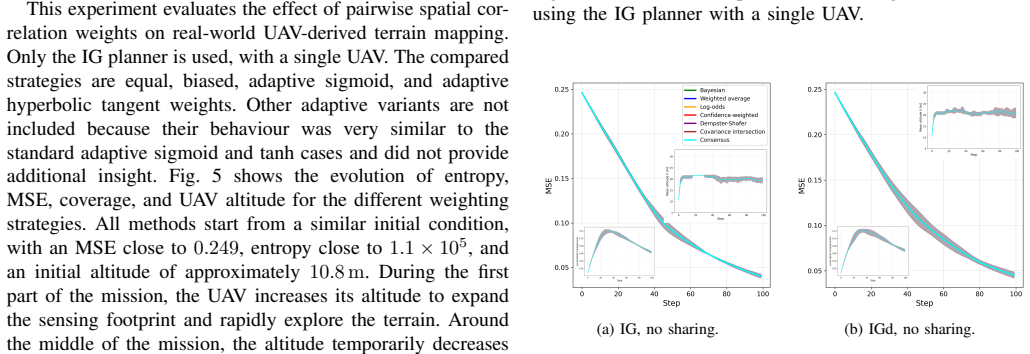
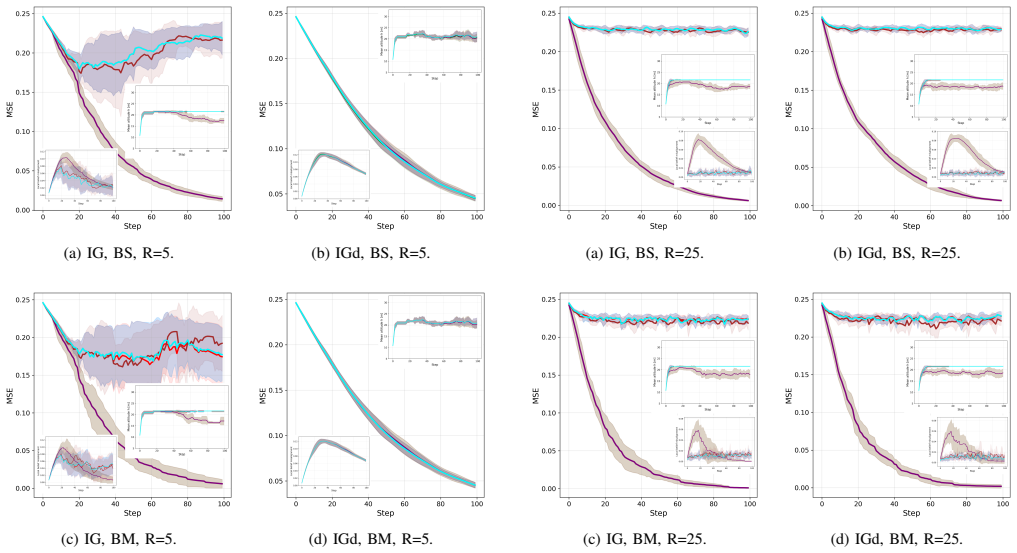
The paper claims that Information Gain based Informative Path Planning (IGbIPP) reduces entropy and mapping error more effectively than Random Walk and Sweep coverage baselines in probabilistic binary terrain mapping, that a wider field of view improves real-world coverage and map accuracy, that simple equal or biased spatial weights are more robust than adaptive weights, and that Bayesian, log-odds, and Dempster-Shafer fusion achieve the best cooperative mapping performance, all validated on synthetic terrains and real UAV-derived agricultural imagery.
What carries the argument
Information Gain based Informative Path Planning (IGbIPP) that selects paths to maximize reduction in map entropy, combined with a factor-graph representation of spatial dependencies and probabilistic belief-fusion rules for sharing information across UAVs.
If this is right
- Multi-UAV teams can reach a target mapping accuracy in less total flight time than with non-information-driven paths.
- Sensor payloads with larger fields of view become preferable for coverage-oriented missions.
- Cooperative mapping systems can rely on standard fusion methods rather than custom adaptive weighting.
- Precision-agriculture surveys can achieve usable maps with smaller teams or shorter missions.
- Uncertainty-aware replanning can be inserted into existing UAV autopilots without changing the underlying map representation.
Where Pith is reading between the lines
- The same planning loop could be tested on moving targets or time-varying terrain if the factor graph is updated continuously rather than once per mission.
- Communication delays or packet loss in belief sharing would likely reduce the observed gains from fusion, an effect not quantified in the reported flights.
- Ground or surface robots operating under similar belief models might inherit the same planning advantage if their motion constraints are substituted into the path optimizer.
- Hybrid systems that switch between IGbIPP and sweep coverage based on current entropy levels remain untested but could combine the strengths of both.
Load-bearing premise
The factor-graph model correctly represents spatial dependencies present in real terrain and the chosen agricultural imagery is representative without unaccounted sensor noise or environmental factors.
What would settle it
A new experiment on additional real terrains in which IGbIPP produces final map entropy or error rates no lower than those of the sweep baseline would falsify the claimed performance advantage.
Figures
read the original abstract
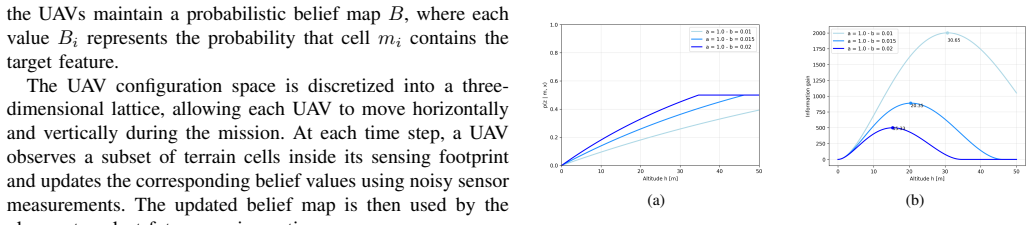
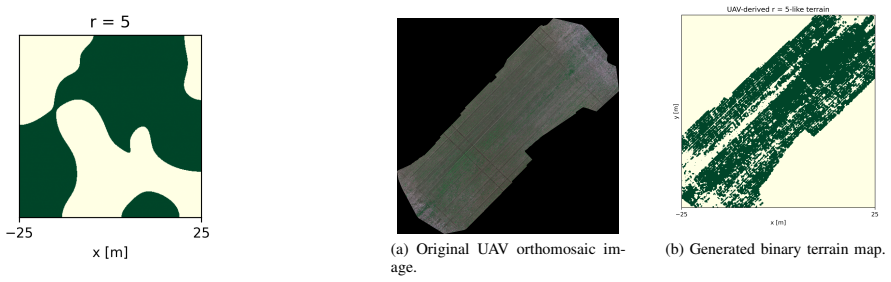
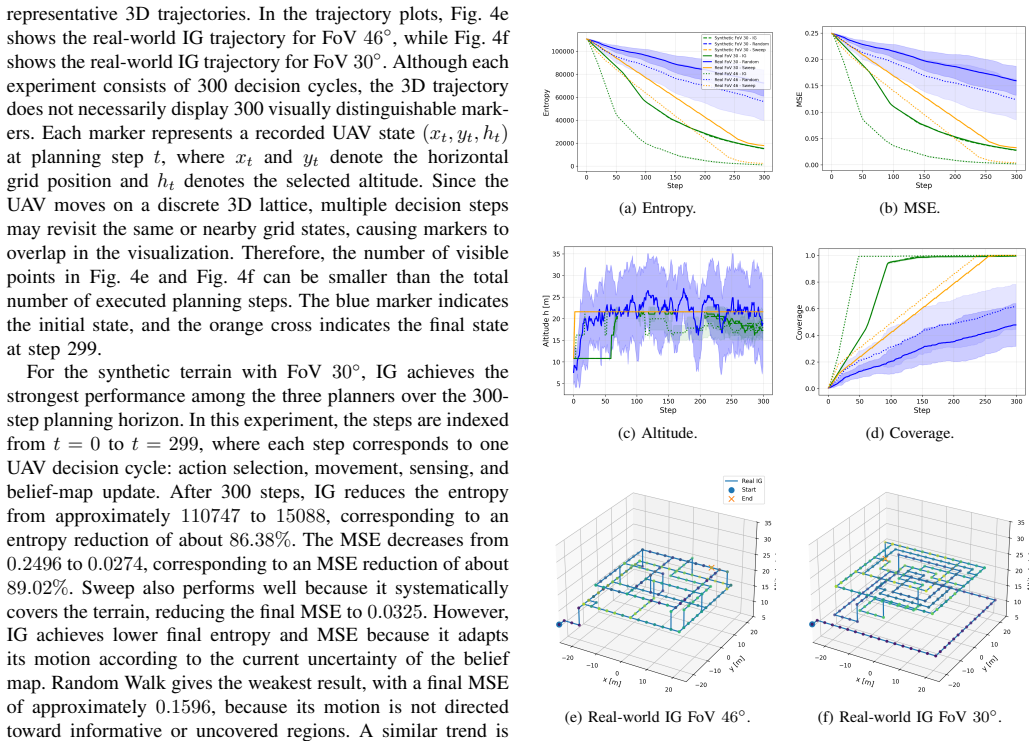
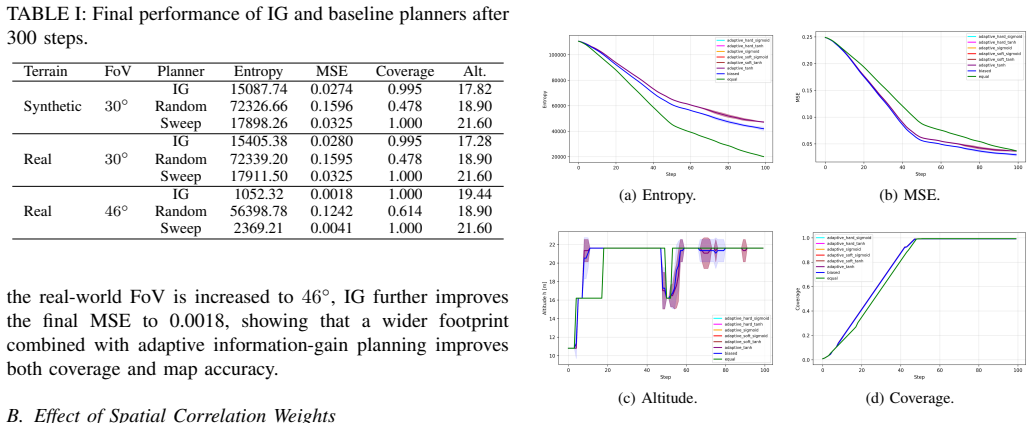
Unmanned aerial vehicles (UAVs) are increasingly used for active sensing and information gathering in spatially distributed environments. Their performance, however, is constrained by limited flight time, sensing uncertainty, and the trade-off between spatial coverage and observation accuracy. This paper presents a real-world validation of a multi-UAV active sensing framework for probabilistic binary terrain mapping, with precision agriculture used as the application case. The environment is represented as a probabilistic belief map, where spatial dependencies are modeled through a factor-graph formulation. UAV decision making is guided by Information Gain based Informative Path Planning (IGbIPP), and the approach is compared with Random Walk and Sweep coverage path planning baselines using both synthetic terrains and real UAV-derived agricultural imagery. The study also evaluates spatial correlation weights and several probabilistic belief-fusion rules for multi-UAV information sharing. Results show that IGbIPP reduces entropy and mapping error more effectively than the baselines, while a wider field of view improves real-world coverage and map accuracy. The results further show that simple equal or biased spatial weights can be more robust than adaptive weights, and that Bayesian, log-odds, and Dempster--Shafer fusion achieve the best cooperative mapping performance. These findings highlight the importance of uncertainty-driven planning, sensing geometry, spatial modeling, and probabilistic fusion for real-world UAV-based active sensing.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a multi-UAV active sensing framework for probabilistic binary terrain mapping, with precision agriculture as the application. Spatial dependencies are modeled via a factor-graph formulation; UAV paths are selected by Information Gain based Informative Path Planning (IGbIPP) and compared against Random Walk and Sweep baselines on both synthetic terrains and real UAV-derived agricultural imagery. The work additionally examines spatial correlation weights and several belief-fusion rules (Bayesian, log-odds, Dempster-Shafer), reporting that IGbIPP yields greater entropy reduction and lower mapping error, that wider fields of view improve coverage, that simple equal or biased weights are more robust than adaptive ones, and that the three named fusion methods perform best in cooperative mapping.
Significance. If the factor-graph model is shown to match empirical spatial structure, the real-world validation on agricultural imagery would supply useful empirical evidence on the relative merits of uncertainty-driven planning versus coverage baselines and on practical fusion choices for multi-UAV systems. The inclusion of both synthetic controls and field imagery is a strength relative to purely simulated studies.
major comments (1)
- [factor-graph formulation (methods)] The factor-graph formulation for spatial dependencies is load-bearing for the IGbIPP information-gain calculations and the reported superiority over baselines. The manuscript provides no direct empirical validation (e.g., variogram, covariance, or autocorrelation comparison) of the chosen factors or weights against the real UAV-derived agricultural imagery; without this check the simulated entropy reductions and path comparisons risk being artifacts of model mismatch rather than genuine terrain structure.
minor comments (2)
- [experimental setup] Clarify the exact number of UAVs, grid resolution, and flight-time constraints used in the real-imagery experiments so that the coverage and error metrics can be reproduced.
- [results on spatial weights] The abstract states that 'simple equal or biased spatial weights can be more robust'; the corresponding results section should report the quantitative robustness metric (e.g., variance across repeated trials or terrain instances) that supports this claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the single major comment below and will incorporate the suggested validation in the revised manuscript.
read point-by-point responses
-
Referee: [factor-graph formulation (methods)] The factor-graph formulation for spatial dependencies is load-bearing for the IGbIPP information-gain calculations and the reported superiority over baselines. The manuscript provides no direct empirical validation (e.g., variogram, covariance, or autocorrelation comparison) of the chosen factors or weights against the real UAV-derived agricultural imagery; without this check the simulated entropy reductions and path comparisons risk being artifacts of model mismatch rather than genuine terrain structure.
Authors: We agree that direct empirical validation of the factor-graph parameters against the real imagery would strengthen the work. The model parameters were selected from domain knowledge of agricultural terrain correlation, and the framework is evaluated end-to-end on real UAV data; however, this does not substitute for an explicit check of the implied spatial structure. In revision we will add a short analysis (new subsection or appendix) that computes empirical variograms/autocorrelation from the real agricultural imagery and compares them to the factor-graph covariance, confirming that the chosen weights are appropriate for the target domain or adjusting them if needed. revision: yes
Circularity Check
No circularity: experimental comparisons are self-contained
full rationale
The paper's core contribution is an empirical evaluation of IGbIPP against Random Walk and Sweep baselines, plus fusion rules, on both synthetic terrains and real UAV agricultural imagery. Spatial dependencies are modeled via a chosen factor-graph formulation, but this is an input modeling assumption rather than a derived claim that reduces to its own outputs by construction. No equations or results are shown to be equivalent to fitted parameters renamed as predictions, and no self-citations are invoked as load-bearing uniqueness theorems. The reported entropy and error reductions are measured against external baselines and real data, making the validation independent of any internal definitional loop.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
P., and B ¨ol¨oni, L
Dutta, A., Roy, S., Kreidl, O. P., and B ¨ol¨oni, L. (2021). Multi-robot information gathering for precision agriculture: Current state, scope, and challenges.IEEE Access, 9, 161416–161430
2021
-
[2]
Zhang, H., Wang, L., Tian, T., and Yin, J. (2021). A review of unmanned aerial vehicle low-altitude remote sensing (UA V-LARS) use in agricultural monitoring in China.Remote Sensing, 13(6), 1221
2021
-
[3]
K., Kapoutsis, A
Krestenitis, M., Raptis, E. K., Kapoutsis, A. C., Ioannidis, K., Kos- matopoulos, E. B., and Vrochidis, S. (2024). Overcome the Fear Of Missing Out: Active sensing UA V scanning for precision agriculture. Robotics and Autonomous Systems, 172, 104581
2024
-
[4]
Pierdicca, L., Ognibene, D., and Trianni, V . (2024). Multi-UA V active sensing for precision agriculture via Bayesian fusion. In2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), pp. 605–611. IEEE
2024
-
[5]
Veiga, T., and Renoux, J. (2023). From reactive to active sensing: A survey on information gathering in decision-theoretic planning.ACM Computing Surveys, 55(13s), 1–22
2023
-
[6]
Popovi ´c, M., Hitz, G., Nieto, J., Sa, I., Siegwart, R., and Galceran, E. (2017). Online informative path planning for active classification using UA Vs. In2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 5753–5758. IEEE
2017
-
[7]
J., Sa, I., Siegwart, R., and Nieto, J
Popovi ´c, M., Vidal-Calleja, T., Hitz, G., Chung, J. J., Sa, I., Siegwart, R., and Nieto, J. (2020). An informative path planning framework for UA V-based terrain monitoring.Autonomous Robots, 44(6), 889–911
2020
-
[8]
Li, Y ., Guo, S., Jia, S., Yan, Y ., Jia, H., and Zhang, W. (2025). Quantifying the effects of UA V flight altitude on the multispectral monitoring accuracy of soil moisture and maize phenotypic parameters. Agronomy, 15(9), 2137
2025
-
[9]
Westheider, J., R ¨uckin, J., and Popovi ´c, M. (2023). Multi-UA V adaptive path planning using deep reinforcement learning. In2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 649–656. IEEE
2023
-
[10]
S. Dogru and L. Marques, “Boustrophedon Based Coverage Path Planning as an Alternative to Local Information Gain Based CPP,”2026 IEEE 23rd Mediterranean Electrotechnical Conference (MELECON), Cairo, Egypt, 2026, pp. 1–6, doi: 10.1109/MELE- CON64486.2026.11418823
-
[11]
I. Sa, M. Popovic, R. Khanna, Z. Chen, P. Lottes, F. Liebisch, J. Nieto, C. Stachniss, A. Walter, and R. Siegwart, “WeedMap: A large-scale semantic weed mapping framework using aerial multispectral imaging and deep neural network for precision farming,”Remote Sensing, 2018. doi: 10.3390/rs10091423
-
[12]
Lara-Molina, F. A. (2025). Optimization of coverage path planning for agricultural drones in weed-infested fields using semantic segmentation. Agriculture, 15(12), 1262
2025
-
[13]
Swindell, J., Popovi ´c, M., and Polvara, R. (2026). Active informative planning for UA V-based weed mapping using discrete Gaussian process representations.arXiv preprint arXiv:2601.13196
arXiv 2026
-
[14]
A., Lobato, F
Lara-Molina, F. A., Lobato, F. S., and Appelt, M. F. (2026). A multi- objective optimization approach to coverage path planning of agricultural drone.IEEE Latin America Transactions, 24(5), 445–455
2026
-
[15]
Pearl, J. (2022). Reverend Bayes on inference engines: A distributed hierarchical approach. InProbabilistic and Causal Inference: The Works of Judea Pearl, pp. 129–138
2022
-
[16]
Adaptive continuous-space informative path planning for online envi- ronmental monitoring,
G. Hitz, E. Galceran, M.-E. Garneau, F. Pomerleau, and R. Siegwart, “Adaptive continuous-space informative path planning for online envi- ronmental monitoring,”Journal of Field Robotics, vol. 34, no. 8, pp. 1427–1449, 2017
2017
-
[17]
A survey on coverage path planning for robotics,
E. Galceran and M. Carreras, “A survey on coverage path planning for robotics,”Robotics and Autonomous Systems, vol. 61, no. 12, pp. 1258– 1276, 2013
2013
-
[18]
Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles,
G. Mier, J. Valente, and S. de Bruin, “Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles,” IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 2166–2172, 2023
2023
-
[19]
Habibi, S., Ivaki, N., and Barata, J. (2025). A systematic literature review of unmanned aerial vehicles for healthcare and emergency services. arXiv preprint arXiv:2504.08834
arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.