A Self-Negotiation Framework for Ethical Decision-Making during Task Interruptions in Service Robots
Pith reviewed 2026-07-01 04:24 UTC · model grok-4.3
The pith
A service robot can resolve conflicts among simultaneous user requests through internal negotiation based on each user's ethical profile.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The self-negotiation framework lets a single robot arbitrate between multiple users during task interruptions by representing each user via an ethical profile that captures contextual preferences and conditions, then resolving the conflict through an internal negotiation process without any external coordination or centralized arbitrator. In simulation the system consistently yields outcomes aligned with the users' ethical preferences, supports multilateral negotiation, responds within 1.5 seconds, and exhibits near-linear runtime growth with increasing numbers of users.
What carries the argument
The self-negotiation framework that encodes users as ethical profiles and performs internal negotiation to resolve priority conflicts.
If this is right
- The robot can produce decisions aligned with users' ethical preferences in simulated interruption scenarios.
- The system supports negotiation involving more than two users at once.
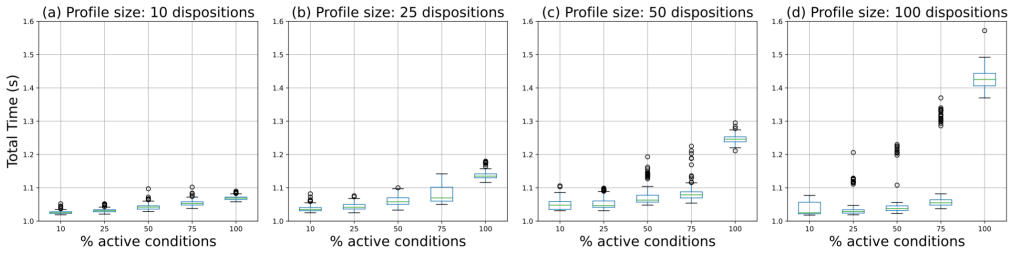
- Decision time remains under 1.5 seconds even as the number of simultaneous users grows.
- Runtime scales near-linearly with the volume of user input provided to the profiles.
Where Pith is reading between the lines
- If the profiles can be updated from ongoing user interaction data, the same mechanism might support long-term adaptation to changing ethical contexts without reprogramming.
- The internal-only approach removes the need for a central server, which could matter for privacy-sensitive public deployments where user data should not leave the robot.
- Because negotiation is modular, the framework could be combined with existing task planners so that ethical priority only intervenes when an interruption occurs.
Load-bearing premise
Representing users by ethical profiles that capture contextual preferences allows ethically aligned decisions to be reached through internal negotiation without external coordination.
What would settle it
Run the robot in a physical setting with real users who have pre-specified ethical preferences; if the robot's chosen service order repeatedly mismatches the users' own rankings of the same scenarios, the claim fails.
Figures
read the original abstract
Service robots operating in public environments frequently encounter interruptions when multiple users request service simultaneously. Resolving such conflicts requires ethical decision-making, as prioritizing one user request can disadvantage another. Current approaches rely on static rules or centralized arbitration and do not support autonomous, ethics-based conflict resolution. This paper addresses the question of how a single robot can arbitrate between multiple users during task interruptions and make ethically aligned decisions without relying on external coordination. We introduce a self-negotiation framework that represents each user by an ethical profile that captures their contextual ethical preferences and conditions, and resolves conflicts through an internal negotiation process. The framework is implemented in a modular ROS-based implementation and evaluated in simulation with a realistic interruption scenario. The results show that the system consistently produces user ethical preference-aligned outcomes, supports multilateral negotiation among users, and responds within 1.5 seconds, with near-linear runtime growth under increasing user input.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a self-negotiation framework for service robots to resolve ethical conflicts during simultaneous task interruptions from multiple users. Each user is represented by an ethical profile encoding contextual preferences; conflicts are arbitrated via an internal negotiation process without external coordination or centralized arbitration. The approach is realized as a modular ROS implementation and tested in simulation on a realistic interruption scenario. Reported outcomes include consistent production of user-preference-aligned decisions, support for multilateral negotiation, sub-1.5-second response times, and near-linear runtime scaling with user count.
Significance. If the simulation results prove robust under detailed scrutiny, the work would offer a concrete, decentralized alternative to static-rule or centralized ethical arbitration in multi-user robotics, addressing a recognized gap in autonomous service-robot ethics. The modular ROS design aids potential reproducibility. However, the simulation-only setting and absence of reported quantitative metrics, baselines, or bias controls limit the strength of the claims and their immediate applicability to real deployments.
major comments (2)
- [Evaluation] Evaluation section: the central claim that the framework 'consistently produces user ethical preference-aligned outcomes' and supports multilateral negotiation rests on simulation results, yet no concrete metrics (e.g., alignment score, success rate, statistical tests), baseline comparisons, or definitions of 'alignment' are supplied. This absence directly undermines assessment of the evidence for the core contribution.
- [Framework and Results] Framework and Results sections: the design choice that ethical profiles plus internal negotiation suffice for alignment without external input is load-bearing, but the simulation scenario does not appear to include stress tests against cases where external coordination would be required or where profile elicitation is noisy; without such tests the generality of the reported sub-1.5 s and near-linear scaling claims cannot be evaluated.
minor comments (2)
- [Abstract and Introduction] The abstract and introduction would benefit from a concise definition or example of an ethical profile and the negotiation protocol steps.
- [Implementation] Clarify whether the ROS implementation is released as open source and provide pseudocode or architecture diagram for the negotiation module.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the evaluation and results sections. The comments identify clear opportunities to strengthen the quantitative support for our claims. We respond to each major comment below.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section: the central claim that the framework 'consistently produces user ethical preference-aligned outcomes' and supports multilateral negotiation rests on simulation results, yet no concrete metrics (e.g., alignment score, success rate, statistical tests), baseline comparisons, or definitions of 'alignment' are supplied. This absence directly undermines assessment of the evidence for the core contribution.
Authors: We agree that the Evaluation section would be strengthened by explicit definitions and quantitative metrics. In the revised manuscript we will add: (1) a formal definition of alignment as the degree to which the final negotiated outcome satisfies the weighted ethical preferences encoded in each user's profile; (2) concrete metrics including mean alignment score across users, success rate (fraction of trials achieving full alignment), and statistical tests (e.g., Wilcoxon signed-rank against chance); and (3) baseline comparisons against static priority rules and random selection. These additions will be supported by the existing simulation data. revision: yes
-
Referee: [Framework and Results] Framework and Results sections: the design choice that ethical profiles plus internal negotiation suffice for alignment without external input is load-bearing, but the simulation scenario does not appear to include stress tests against cases where external coordination would be required or where profile elicitation is noisy; without such tests the generality of the reported sub-1.5 s and near-linear scaling claims cannot be evaluated.
Authors: The reported simulation uses a realistic multi-user interruption scenario to demonstrate the self-contained negotiation process. We acknowledge that additional stress tests would better bound the claims. In revision we will augment the Results section with new simulation runs that inject Gaussian noise into profile elicitation and that include scenarios where profile conflicts cannot be resolved internally (e.g., contradictory hard constraints). We will also report updated timing and scaling measurements under these conditions and add a limitations paragraph discussing when external coordination may still be required. revision: yes
Circularity Check
No significant circularity; framework presented as independent design choice with simulation evidence
full rationale
The paper introduces a self-negotiation framework using ethical profiles for conflict resolution in service robots, implemented in ROS and evaluated via simulation on an interruption scenario. The abstract and described claims present the ethical-profile representation and internal negotiation as the core design choice under test, with reported outcomes (preference alignment, multilateral support, sub-1.5s response, near-linear scaling) offered as direct empirical results rather than derivations that reduce to inputs by construction. No equations, fitted parameters renamed as predictions, self-citation load-bearing premises, uniqueness theorems, or ansatz smuggling are visible in the provided text. The central assumption is explicitly the hypothesis being evaluated, not presupposed by the measurement process itself. This is the common case of a self-contained engineering proposal whose validity rests on external simulation benchmarks rather than definitional equivalence.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Interruptable autonomy: Towards dialog-based robot task management,
Y . Sun, B. Coltin, and M. Veloso, “Interruptable autonomy: Towards dialog-based robot task management,” in27th AAAI Conf. on AI, 2013
2013
-
[2]
Robot classification of human interruptibility and a study of its effects,
S. Banerjee, A. Silva, and S. Chernova, “Robot classification of human interruptibility and a study of its effects,”J. Hum.-Robot Interact., vol. 7, Oct. 2018
2018
-
[3]
Task harmonisation for a single-task robot controller,
W. Dudek, M. W˛ egierek, J. Karwowski,et al., “Task harmonisation for a single-task robot controller,” in2019 12th Int. WS on Robot Motion and Control (RoMoCo), pp. 86–91, 2019
2019
-
[4]
Scheduling of a robot’s tasks with the tasker framework,
W. Dudek and T. Winiarski, “Scheduling of a robot’s tasks with the tasker framework,”IEEE Access, vol. 8, pp. 161449–161471, 2020
2020
-
[5]
Implementations in machine ethics: A survey,
S. Tolmeijer, M. Kneer, C. Sarasua,et al., “Implementations in machine ethics: A survey,”ACM Computing Surveys, vol. 53, no. 6, pp. 1–38, 2020
2020
-
[6]
Incorporating ethical values into software architecture design practices,
R. Alidoosti, P. Lago, E. Poort,et al., “Incorporating ethical values into software architecture design practices,” in19th Int. Conf. on Soft. Architecture, pp. 124–127, 2022
2022
-
[7]
Engineering digital systems for humanity: A research roadmap,
M. Autili, M. De Sanctis, P. Inverardi,et al., “Engineering digital systems for humanity: A research roadmap,”ACM Transactions on Soft. Eng. and Methodology, vol. 34, no. 5, pp. 1–33, 2025
2025
-
[8]
Not some random agent: Multi- person interaction with a personalizing service robot,
S. Reig, M. Luria, J. Z. Wang,et al., “Not some random agent: Multi- person interaction with a personalizing service robot,” inACM/IEEE Int. Conf. on Human-Robot Interaction, HRI ’20, p. 289–297, 2020
2020
-
[9]
Lifecycle model of a negotiation agent: A survey of automated negotiation techniques,
U. Kiruthika, T. S. Somasundaram, and S. Raja, “Lifecycle model of a negotiation agent: A survey of automated negotiation techniques,” Group Decision and Negotiation, vol. 29, no. 6, pp. 1239–1262, 2020
2020
-
[10]
Robethichor: Automated context-aware ethics-based negotiation for autonomous robots,
M. A. Memon, G. Filippone, G. L. Scoccia,et al., “Robethichor: Automated context-aware ethics-based negotiation for autonomous robots,”Journal of Systems and Software, p. 112692, 2025
2025
-
[11]
Soft ethics and the governance of the digital,
L. Floridi, “Soft ethics and the governance of the digital,”Philosophy & Technology, vol. 31, no. 1, pp. 1–8, 2018
2018
-
[12]
The nature, importance, and difficulty of machine ethics,
J. H. Moor, “The nature, importance, and difficulty of machine ethics,” IEEE intelligent systems, vol. 21, no. 4, pp. 18–21, 2006
2006
-
[13]
Why machine ethics?,
C. Allen, W. Wallach, and I. Smit, “Why machine ethics?,”IEEE Intelligent Systems, vol. 21, no. 4, pp. 12–17, 2006
2006
-
[14]
Anticipation in robotics,
A. F. T. Winfield and V . V . Hafner, “Anticipation in robotics,” Handbook of Anticipation: Theoretical and Applied Aspects of the Use of Future in Decision Making, pp. 1587–1615, 2019
2019
-
[15]
A reference architec- ture for ethical-aware autonomous systems,
M. Autili, M. De Sanctis, P. Inverardi,et al., “A reference architec- ture for ethical-aware autonomous systems,”Journal of Systems and Software, p. 112749, 2025
2025
-
[16]
Social and collaborative aspects of interaction with a service robot,
K. Severinson-Eklundh, A. Green, and H. Hüttenrauch, “Social and collaborative aspects of interaction with a service robot,”Robotics and Autonomous Systems, vol. 42, no. 3, pp. 223–234, 2003
2003
-
[17]
Interleaving planning and robot execution for asynchronous user requests,
K. Z. Haigh and M. M. Veloso, “Interleaving planning and robot execution for asynchronous user requests,”Autonomous Robots, vol. 5, pp. 79–95, Mar 1998
1998
-
[18]
Robot task interruption by learning to switch among multiple models,
A. Mohseni-Kabir and M. Veloso, “Robot task interruption by learning to switch among multiple models,” in27th Int. Joint Conf. on Artificial Intelligence, pp. 4943–4949, 7 2018
2018
-
[19]
You’re delaying my task?! the impact of task order and motive on perceptions of a robot,
E. J. Carter, L. M. Hiatt, and S. Rosenthal, “You’re delaying my task?! the impact of task order and motive on perceptions of a robot,” in17th Int. Conf. on Human-Robot Interaction, pp. 304–312, 2022
2022
-
[20]
Perceptions of a robot that interleaves tasks for multiple users,
E. J. Carter, P. Vichivanives, R. Xing,et al., “Perceptions of a robot that interleaves tasks for multiple users,”J. Hum.-Robot Interact., vol. 13, Oct. 2024
2024
-
[21]
An automated negotiation agent for permission management,
T. Baarslag, A. Alper, R. Gomer,et al., “An automated negotiation agent for permission management,” in16th Int. Conf. on Autonomous Agents and MultiAgent Systems, pp. 380–390, 2017
2017
-
[22]
A systematic mapping study on automated negotiation for autonomous intelligent systems,
M. A. Memon, G. L. Scoccia, and M. Autili, “A systematic mapping study on automated negotiation for autonomous intelligent systems,” Automated Soft. Eng., vol. 32, no. 2, pp. 1–46, 2025
2025
-
[23]
A one-shot bargaining strategy for dealing with multifarious opponents,
S. Ji, C. Zhang, K. Sim,et al., “A one-shot bargaining strategy for dealing with multifarious opponents,”Applied Intelligence, vol. 40, no. 4, pp. 557–574, 2014
2014
-
[24]
Alternating offers protocols for multilateral negotiation,
R. Aydo ˘gan, D. Festen, K. V . Hindriks,et al., “Alternating offers protocols for multilateral negotiation,” inModern Approaches to Agent-based Complex Automated Negotiation, pp. 153–167, 2017
2017
-
[25]
A multiagent multilateral negotiation protocol for joint decision-making,
R. Caillere, S. Arib, S. Aknine,et al., “A multiagent multilateral negotiation protocol for joint decision-making,” inRecent Advances in Agent-based Complex Automated Negotiation, pp. 71–88, 2016
2016
-
[26]
A review of research literature on bilateral negotiations,
C. Li, J. Giampapa, and K. Sycara C., “A review of research literature on bilateral negotiations,” tech. rep., Robotics Institute, Carnegie Mellon University, 2003
2003
-
[27]
The value of information in automated negotiation: A decision model for eliciting user preferences,
T. Baarslag and M. Kaisers, “The value of information in automated negotiation: A decision model for eliciting user preferences,” in16th Int. Conf. on Autonomous Agents and MultiAgent Systems, pp. 391– 400, 2017
2017
-
[28]
Automated privacy negotiations with preference uncertainty,
D. Filipczuk, T. Baarslag, E. H. Gerding,et al., “Automated privacy negotiations with preference uncertainty,”Autonomous Agents and Multi-Agent Systems, vol. 36, no. 2, p. 49, 2022
2022
-
[29]
Formal verification of ethical choices in autonomous systems,
L. Dennis, M. Fisher, M. Slavkovik,et al., “Formal verification of ethical choices in autonomous systems,”Robotics and Autonomous Systems, vol. 77, pp. 1–14, 2016
2016
-
[30]
Landscape of machine implemented ethics,
V . Nallur, “Landscape of machine implemented ethics,”Science and Engineering Ethics, vol. 26, no. 5, pp. 2381–2399, 2020
2020
-
[31]
On proactive, transparent, and verifiable ethical reasoning for robots,
P. Bremner, L. A. Dennis, M. Fisher,et al., “On proactive, transparent, and verifiable ethical reasoning for robots,”Proceedings of the IEEE, vol. 107, no. 3, pp. 541–561, 2019
2019
-
[32]
A survey of behavior trees in robotics and ai,
M. Iovino, E. Scukins, J. Styrud, P. Ögren, and C. Smith, “A survey of behavior trees in robotics and ai,”Robotics and Autonomous Systems, vol. 154, p. 104096, 2022
2022
-
[33]
Utilitarianism,
J. S. Mill, “Utilitarianism,” inSeven masterpieces of philosophy, pp. 329–375, Routledge, 2016
2016
-
[34]
A roadmap for responsi- ble robotics: Promoting human agency and collaborative efforts,
D. Araiza-Illan, K. Baum, H. Beebee,et al., “A roadmap for responsi- ble robotics: Promoting human agency and collaborative efforts,”IEEE Robotics & Automation Magazine, 2025
2025
-
[35]
Competitions for benchmarking: Task and functionality scoring complete performance assessment,
F. Amigoni, E. Bastianelli, J. Berghofer,et al., “Competitions for benchmarking: Task and functionality scoring complete performance assessment,”IEEE Robotics & Automation Magazine, vol. 22, no. 3, pp. 53–61, 2015
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.