EgoGapBench: Benchmarking Egocentric Action Selection in Multi-Agent Scenes
Pith reviewed 2026-07-02 15:01 UTC · model grok-4.3
The pith
MLLMs fail to select actions from their own viewpoint amid other agents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
EgoGapBench shows that both open-source and proprietary MLLMs perform substantially worse than humans on Egocentric Action Selection and systematically choose actions performed by other visible agents. Fine-tuning on existing egocentric datasets fails to close this gap and can even reduce accuracy. Fine-tuning on EgoGapBench training data raises performance but still falls short of human reliability. The results indicate that the ability to select actions from the agent's own perspective is not acquired from first-person-view data alone.
What carries the argument
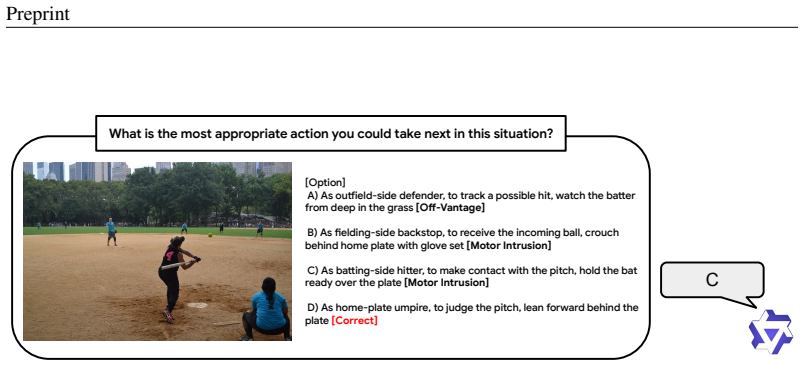
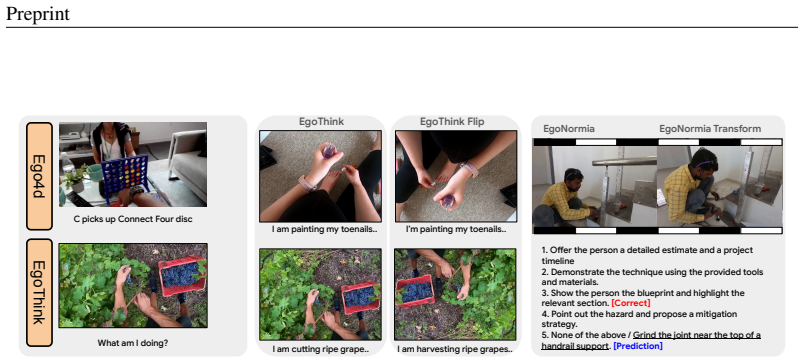
EgoGapBench, a diagnostic benchmark that isolates Egocentric Action Selection by forcing choice of an action appropriate to the camera wearer's perspective in multi-agent scenes without body cues.
If this is right
- MLLMs require separate evaluation and training for egocentric perspective taking beyond scene understanding.
- Existing egocentric datasets are insufficient to teach models to distinguish their own actions from those of others.
- Targeted fine-tuning on multi-agent egocentric data improves but does not solve the deficit.
- Models will continue to misattribute actions in crowded scenes unless the gap is addressed.
Where Pith is reading between the lines
- The limitation could hinder reliable use of MLLMs in collaborative settings where distinguishing self from others matters.
- New data collection focused on explicit perspective conflicts may be needed rather than relying on standard egocentric video.
- The benchmark could serve as a template for testing other perspective-sensitive skills such as predicting what another agent will do.
Load-bearing premise
The benchmark tasks isolate egocentric perspective understanding from ordinary first-person scene understanding even when body cues are missing.
What would settle it
An MLLM trained solely on existing egocentric datasets that reaches human accuracy on EgoGapBench would falsify the claim that egocentric action selection cannot be learned from first-person-view data alone.
Figures
read the original abstract
Existing egocentric benchmarks have primarily constructed the egocentric setting from first-person-view data, which makes it difficult to evaluate egocentric perspective itself in isolation. However, understanding first-person-view input and taking an egocentric perspective are separable abilities, especially when first-person body cues are absent or when other agents are present. To isolate egocentric perspective understanding, we introduce EgoGapBench, a diagnostic benchmark for measuring action selection in multi-agent egocentric scenes. We define the ability measured by this benchmark as Egocentric Action Selection (EAS): selecting an appropriate action from the agent's perspective in the presence of other agents. On EgoGapBench, humans answer reliably, whereas both open-source and proprietary MLLMs perform substantially worse and systematically select actions performed by other visible agents. Fine-tuning on existing egocentric data fails to close this gap and can even be detrimental. In contrast, fine-tuning on EgoGapBench training data improves accuracy but does not reach human performance. These results show that EAS is difficult to acquire from first-person-view data alone, and that MLLMs should be evaluated and trained not only for scene understanding but also for egocentric action selection.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces EgoGapBench, a diagnostic benchmark for Egocentric Action Selection (EAS) in multi-agent scenes. It argues that existing egocentric benchmarks conflate first-person-view scene understanding with true egocentric perspective-taking, especially absent body cues. The central empirical claim is that humans answer reliably on EgoGapBench while both open-source and proprietary MLLMs perform substantially worse and systematically select actions performed by other visible agents; fine-tuning on existing egocentric datasets fails to close the gap (and can degrade performance), while fine-tuning on EgoGapBench training data improves accuracy but does not reach human levels. The conclusion is that EAS cannot be acquired from first-person-view data alone.
Significance. If the benchmark successfully isolates perspective-taking from generic scene understanding, the results identify a clear limitation in current MLLMs and demonstrate that standard egocentric training corpora are insufficient for this capability. The human-model performance gap and the differential effect of fine-tuning regimes provide concrete, falsifiable baselines for future work on perspective-aware models in robotics and AR.
major comments (1)
- [Abstract] Abstract (and benchmark construction sections): the task prompt template, scene-selection criteria, and input format used to identify the ego agent among visible others are not described. The central claim that observed model errors reflect a failure of egocentric perspective-taking (rather than saliency bias or prompt ambiguity) is load-bearing on this isolation being achieved; without explicit evidence that the prompt unambiguously designates the camera viewpoint, the systematic 'other-agent' error pattern could arise from generic visual saliency rather than an EAS deficit.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on clarifying the benchmark construction. We address the major comment below and will revise the manuscript to strengthen the presentation of how the egocentric viewpoint is isolated.
read point-by-point responses
-
Referee: [Abstract] Abstract (and benchmark construction sections): the task prompt template, scene-selection criteria, and input format used to identify the ego agent among visible others are not described. The central claim that observed model errors reflect a failure of egocentric perspective-taking (rather than saliency bias or prompt ambiguity) is load-bearing on this isolation being achieved; without explicit evidence that the prompt unambiguously designates the camera viewpoint, the systematic 'other-agent' error pattern could arise from generic visual saliency rather than an EAS deficit.
Authors: We agree that the abstract and benchmark construction sections would benefit from explicit details on the prompt template, scene-selection criteria, and input format. In the revised version we will expand the benchmark construction section to include the full task prompt template (which designates the camera wearer as the ego agent via explicit instructions such as "select the action the person holding the camera should take"), the scene-selection criteria (multi-agent scenes with no visible body cues for the camera wearer, balanced action distributions), and the input format (first-person video frames with the ego agent identified solely by viewpoint). We will also add example prompts, qualitative error analysis, and a short ablation showing that rephrasing the prompt to emphasize "your action" does not alter the model error pattern. The systematic "other-agent" bias (rather than random or most-salient selection) combined with near-ceiling human performance already suggests the gap is not reducible to generic saliency, but the added material will make this isolation explicit. revision: yes
Circularity Check
No circularity: purely empirical benchmark construction and evaluation
full rationale
The paper introduces EgoGapBench as a new diagnostic dataset for Egocentric Action Selection and reports human vs. MLLM performance plus fine-tuning experiments. No derivations, equations, fitted parameters renamed as predictions, or self-citation chains appear in the provided text. All claims rest on direct empirical measurements (accuracy numbers, systematic error patterns) rather than any reduction of outputs to inputs by construction. The central claim that EAS is difficult to acquire from FPV data alone is supported by the reported fine-tuning results on existing egocentric datasets versus the new benchmark, which are independent observations. This is a standard empirical benchmark paper with no load-bearing self-referential steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Ego4d: Around the world in 3,000 hours of egocentric video , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[2]
IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=
The epic-kitchens dataset: Collection, challenges and baselines , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=. 2020 , publisher=
2020
-
[3]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Egothink: Evaluating first-person perspective thinking capability of vision-language models , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[4]
Advances in Neural Information Processing Systems , volume=
Egoschema: A diagnostic benchmark for very long-form video language understanding , author=. Advances in Neural Information Processing Systems , volume=
-
[5]
International Journal of Computer Vision , volume=
Egoplan-bench: Benchmarking multimodal large language models for human-level planning , author=. International Journal of Computer Vision , volume=. 2026 , publisher=
2026
-
[6]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Ego-Grounding for Personalized Question-Answering in Egocentric Videos , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[7]
arXiv preprint arXiv:2502.20490 , year=
Egonormia: Benchmarking physical social norm understanding , author=. arXiv preprint arXiv:2502.20490 , year=
-
[8]
Advances in Neural Information Processing Systems , volume=
IndEgo: A Dataset of Industrial Scenarios and Collaborative Work for Egocentric Assistants , author=. Advances in Neural Information Processing Systems , volume=
-
[9]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
MindPower: Enabling Theory-of-Mind Reasoning in VLM-based Embodied Agents , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[10]
Advances in neural information processing systems , volume=
Instructblip: Towards general-purpose vision-language models with instruction tuning , author=. Advances in neural information processing systems , volume=
-
[11]
Advances in neural information processing systems , volume=
Visual instruction tuning , author=. Advances in neural information processing systems , volume=
-
[12]
Advances in neural information processing systems , volume=
Flamingo: a visual language model for few-shot learning , author=. Advances in neural information processing systems , volume=
-
[13]
EgoVLA: Learning Vision-Language-Action Models from Egocentric Human Videos
Egovla: Learning vision-language-action models from egocentric human videos , author=. arXiv preprint arXiv:2507.12440 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[14]
Advances in Neural Information Processing Systems , volume=
Mme: A comprehensive evaluation benchmark for multimodal large language models , author=. Advances in Neural Information Processing Systems , volume=
-
[15]
Advances in Neural Information Processing Systems , volume=
Embodiedgpt: Vision-language pre-training via embodied chain of thought , author=. Advances in Neural Information Processing Systems , volume=
-
[16]
Advances in Neural Information Processing Systems , volume=
Egotaskqa: Understanding human tasks in egocentric videos , author=. Advances in Neural Information Processing Systems , volume=
-
[17]
2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , pages=
Is ‘right’right? enhancing object orientation understanding in multimodal large language models through egocentric instruction tuning , author=. 2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , pages=. 2025 , organization=
2025
-
[18]
European conference on computer vision , pages=
Microsoft coco: Common objects in context , author=. European conference on computer vision , pages=. 2014 , organization=
2014
-
[19]
2024 , eprint=
SWIFT:A Scalable lightWeight Infrastructure for Fine-Tuning , author=. 2024 , eprint=
2024
-
[20]
Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
Egolife: Towards egocentric life assistant , author=. Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
-
[21]
2026 , howpublished =
Gemma 4 Model Card , author =. 2026 , howpublished =
2026
-
[22]
Expanding Performance Boundaries of Open-Source Multimodal Models with Model, Data, and Test-Time Scaling , author=. arXiv preprint arXiv:2412.05271 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[23]
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency , author=. arXiv preprint arXiv:2508.18265 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[24]
2026 , howpublished =
2026
-
[25]
Gpt-4o system card , author=. arXiv preprint arXiv:2410.21276 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[26]
2025 , howpublished =
2025
-
[27]
Charades-Ego: A Large-Scale Dataset of Paired Third and First Person Videos
Charades-ego: A large-scale dataset of paired third and first person videos , author=. arXiv preprint arXiv:1804.09626 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[28]
Proceedings of the European conference on computer vision (ECCV) , pages=
In the eye of beholder: Joint learning of gaze and actions in first person video , author=. Proceedings of the European conference on computer vision (ECCV) , pages=
-
[29]
Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision , pages=
Industreal: A dataset for procedure step recognition handling execution errors in egocentric videos in an industrial-like setting , author=. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision , pages=
-
[30]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Holoassist: an egocentric human interaction dataset for interactive ai assistants in the real world , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[31]
European Conference on Computer Vision , pages=
My view is the best view: Procedure learning from egocentric videos , author=. European Conference on Computer Vision , pages=. 2022 , organization=
2022
-
[32]
arXiv preprint arXiv:2603.12147 , year=
EgoIntent: An Egocentric Step-level Benchmark for Understanding What, Why, and Next , author=. arXiv preprint arXiv:2603.12147 , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.