SuperFlex: Deformable Superquadrics for Point Cloud Decomposition
Pith reviewed 2026-07-02 13:58 UTC · model grok-4.3
The pith
Superquadrics gain bending, tapering and a new loss to represent curved shapes more accurately in point clouds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
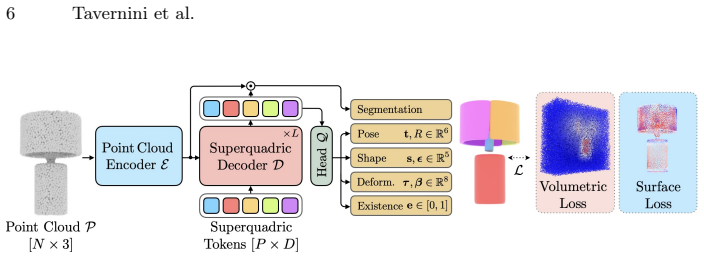
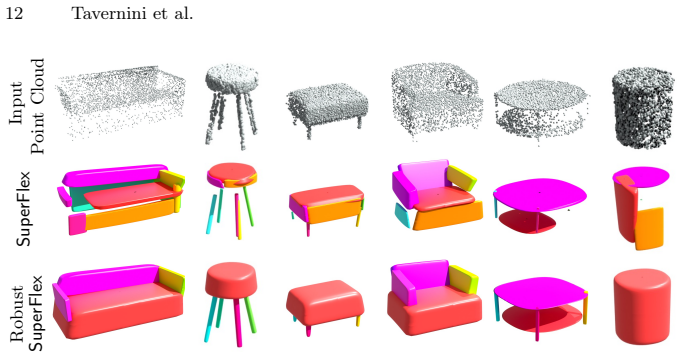
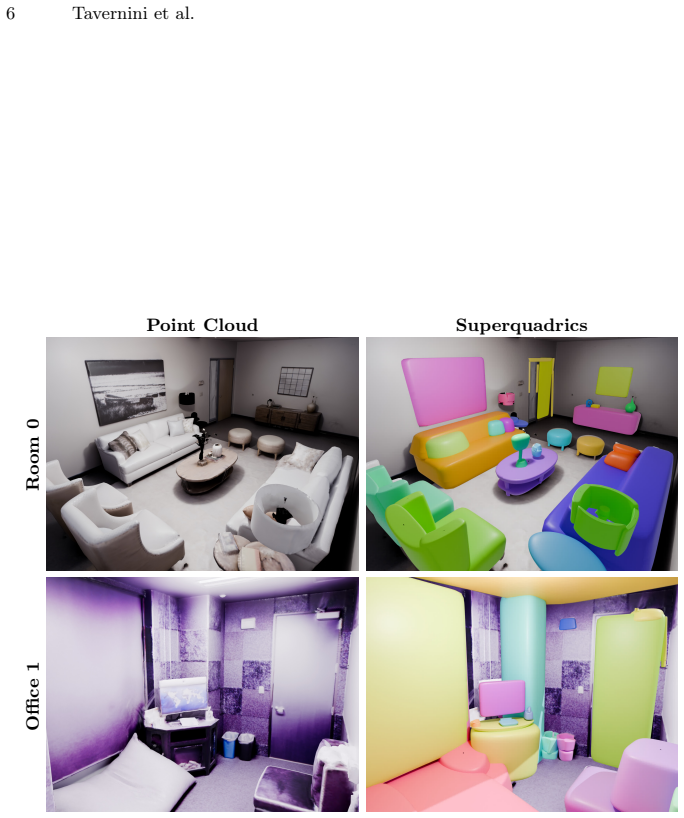
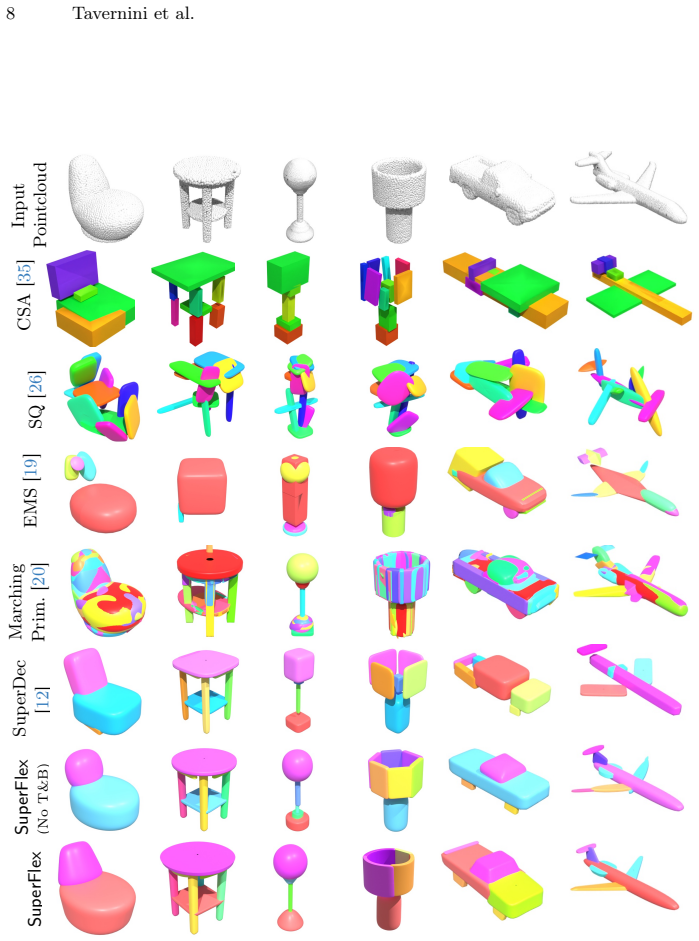
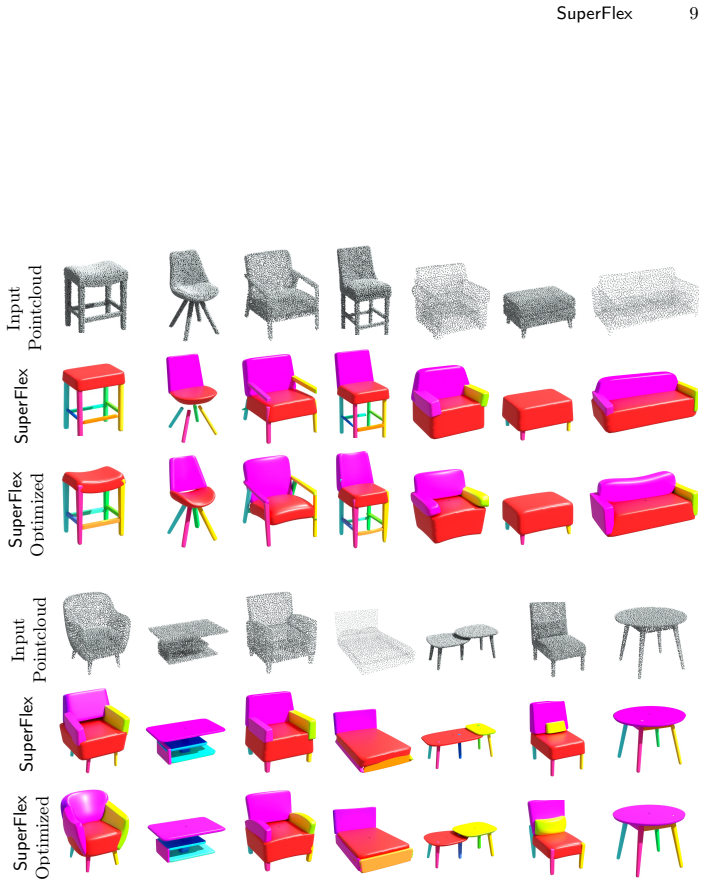
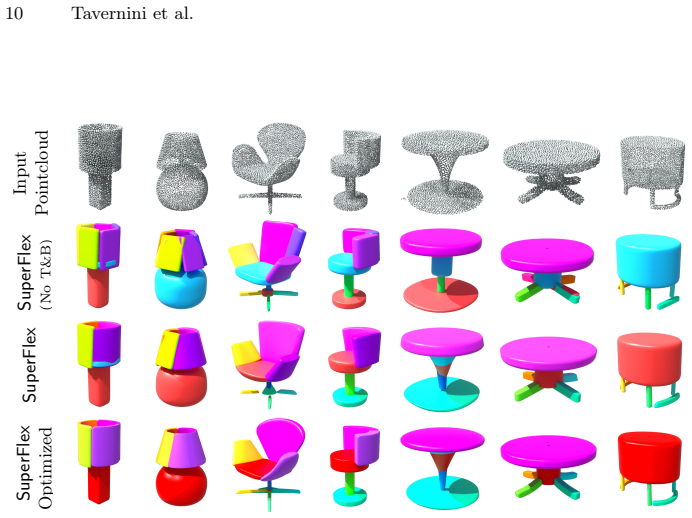
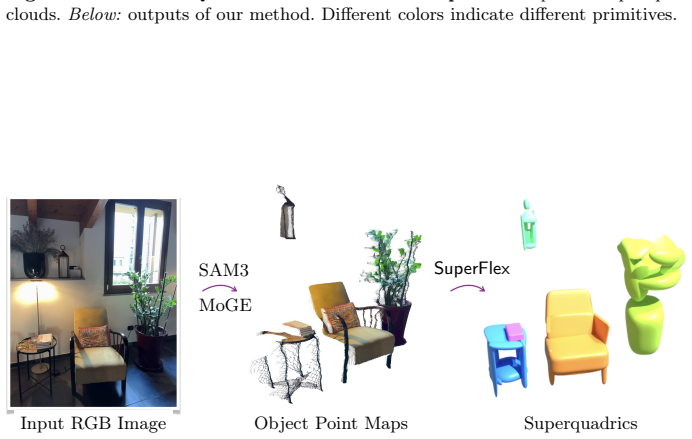
The framework adds a novel loss formulation and bending and tapering deformations to superquadrics, enabling high-fidelity representation of curved and asymmetric geometries, and leverages these decompositions to train a model robust to partial point clouds.
What carries the argument
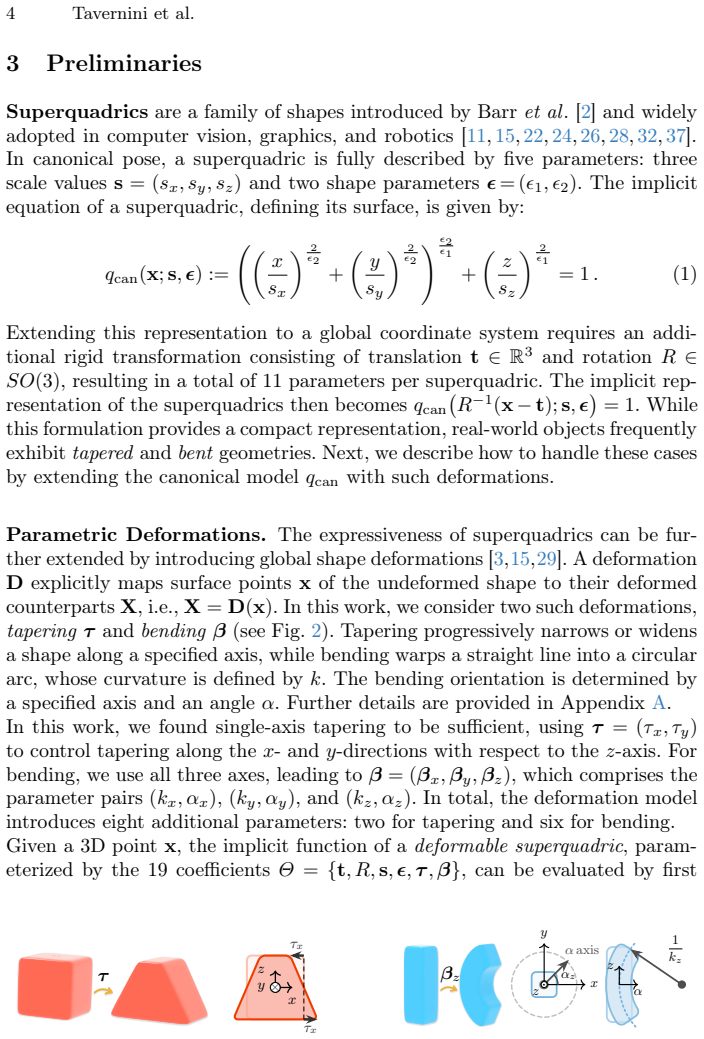
Deformable superquadric primitives equipped with bending and tapering, optimized under a new loss function.
Load-bearing premise
The new loss formulation and bending/tapering deformations can be optimized or learned while preserving the geometric interpretability and compactness of the superquadric primitives.
What would settle it
Running the optimization or training on benchmark datasets and measuring no gain in reconstruction metrics such as Chamfer distance over baselines would disprove the accuracy improvements.
Figures


read the original abstract
Superquadrics have proven to provide a compact, geometrically meaningful representation for 3D objects. However, existing methods suffer from limited reconstruction accuracy, are restricted to rigid primitives, and lack robustness to partial point clouds. In this work, we present SuperFlex, an enhanced framework that expands the expressive power and applicability of superquadric decompositions. First, we introduce a novel loss formulation which significantly improves reconstruction accuracy. Second, we include bending and tapering deformations, enabling high-fidelity representation of curved and asymmetric geometries. Finally, we leverage these high-quality decompositions as supervision to train a model that is robust to partial real-world point clouds. Experiments demonstrate substantial improvements in reconstruction accuracy over both optimization- and learning-based baselines while maintaining a highly compact primitive representation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
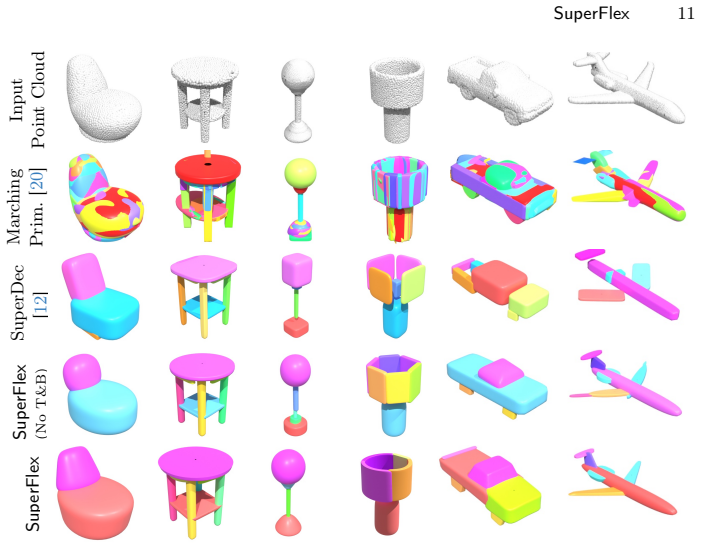
Summary. The paper introduces SuperFlex, a framework extending superquadric decomposition of point clouds via a novel loss formulation for improved accuracy, bending and tapering deformations to handle curved and asymmetric shapes, and supervision from these decompositions to train a model robust to partial real-world point clouds. It claims substantial reconstruction accuracy gains over optimization- and learning-based baselines while preserving a compact primitive representation.
Significance. If the quantitative results and ablations hold, the work meaningfully extends the utility of geometrically interpretable superquadrics to more complex real-world geometries and partial observations, potentially benefiting downstream tasks in 3D vision that value both compactness and fidelity over black-box alternatives.
major comments (2)
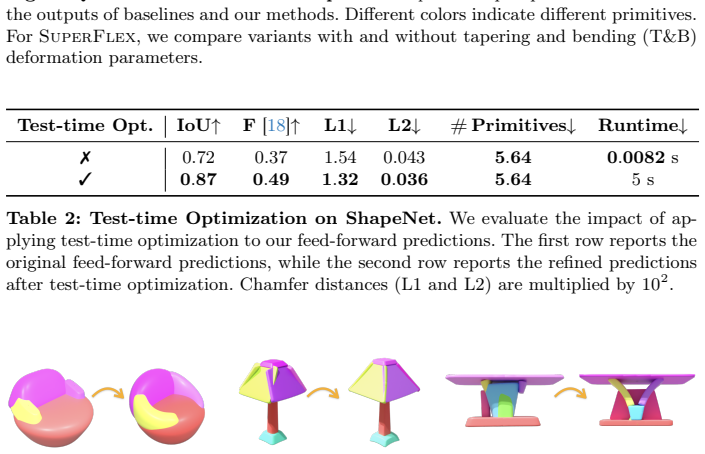
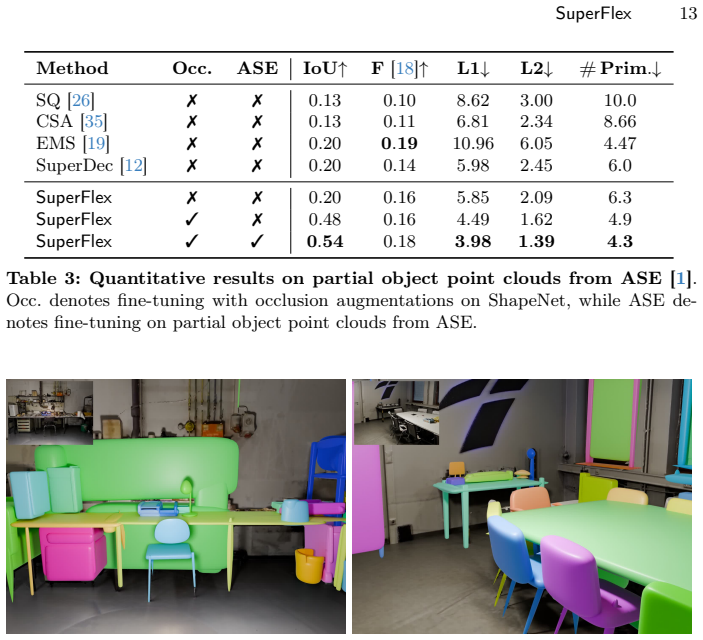
- [Experiments] Experiments section: the central claim of 'substantial improvements' over baselines requires explicit reporting of metrics (e.g., Chamfer distance, IoU), ablation tables isolating the novel loss versus deformations, and error analysis on partial clouds; without these the accuracy claim remains unverified from the abstract alone.
- [Method] Method, deformation parameterization: the bending and tapering extensions must be shown not to inflate the effective degrees of freedom beyond the claimed compactness (e.g., via a table of primitive parameter counts before/after deformation); otherwise the interpretability advantage over general meshes is at risk.
minor comments (2)
- [Abstract] Abstract, paragraph 2: the phrase 'highly compact primitive representation' would benefit from a concrete comparison (e.g., average number of primitives or bits per shape) to prior superquadric methods.
- [Related Work] Related work: ensure explicit citation of the specific superquadric fitting losses used as baselines so readers can assess novelty of the proposed formulation.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive feedback. We address each major comment below and commit to revisions that strengthen the experimental reporting and method clarity while preserving the core contributions of the work.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the central claim of 'substantial improvements' over baselines requires explicit reporting of metrics (e.g., Chamfer distance, IoU), ablation tables isolating the novel loss versus deformations, and error analysis on partial clouds; without these the accuracy claim remains unverified from the abstract alone.
Authors: The full manuscript reports quantitative results using Chamfer distance and related metrics against both optimization- and learning-based baselines. However, we agree that dedicated ablation tables and partial-cloud error analysis would make the contributions of the novel loss and deformations more transparent. We will add these elements to the experiments section in the revised version. revision: yes
-
Referee: [Method] Method, deformation parameterization: the bending and tapering extensions must be shown not to inflate the effective degrees of freedom beyond the claimed compactness (e.g., via a table of primitive parameter counts before/after deformation); otherwise the interpretability advantage over general meshes is at risk.
Authors: We will include a new table in the method section that enumerates the parameter count per primitive for the base superquadric formulation versus the version augmented with bending and tapering. This will explicitly demonstrate that the added deformation parameters remain small in number relative to the gain in expressiveness, thereby preserving the compactness and geometric interpretability of the representation. revision: yes
Circularity Check
No significant circularity
full rationale
The available text consists only of the abstract, which states high-level contributions (novel loss, bending/tapering deformations, supervision for partial clouds) without any equations, parameter definitions, loss formulations, or derivation steps. No claimed prediction, uniqueness theorem, or first-principles result is present that could reduce to fitted inputs or self-citations by construction. The experimental claim of improved accuracy is asserted but not supported by any inspectable chain, so no circularity of any enumerated kind can be exhibited. The paper is therefore self-contained against external benchmarks from the given material.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
In: European Confer- ence on Computer Vision (ECCV) (2024) 13
Avetisyan, A., Xie, C., Howard-Jenkins, H., Yang, T.Y., Aroudj, S., Patra, S., Zhang, F., Frost, D., Holland, L., Orme, C., et al.: SceneScript: Reconstructing Scenes with an Autoregressive Structured Language Model. In: European Confer- ence on Computer Vision (ECCV) (2024) 13
2024
-
[2]
Barr,A.H.:SuperquadricsandAngle-PreservingTransformations.IEEEComputer Graphics and Applications (1981) 2, 4 16 Tavernini et al
1981
-
[3]
ACM SIGGRAPH Computer Graphics (1984) 4
Barr, A.H.: Global and local deformations of solid primitives. ACM SIGGRAPH Computer Graphics (1984) 4
1984
-
[4]
Brazil, G., Kumar, A., Straub, J., Ravi, N., Johnson, J., Gkioxari, G.: Omni3D: A LargeBenchmarkandModelfor3DObjectDetectionintheWild.In:International Conference on Computer Vision and Pattern Recognition (CVPR) (2023) 8
2023
-
[5]
Carion, N., Gustafson, L., Hu, Y.T., Debnath, S., Hu, R., Suris, D., Ryali, C., Al- wala, K.V., Khedr, H., Huang, A., Lei, J., Ma, T., Guo, B., Kalla, A., Marks, M., Greer, J., Wang, M., Sun, P., Rädle, R., Afouras, T., Mavroudi, E., Xu, K., Wu, T.H., Zhou, Y., Momeni, L., Hazra, R., Ding, S., Vaze, S., Porcher, F., Li, F., Li, S., Kamath, A., Cheng, H.K....
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[6]
ShapeNet: An Information-Rich 3D Model Repository
Chang, A.X., Funkhouser, T., Guibas, L., Hanrahan, P., Huang, Q., Li, Z., Savarese, S., Savva, M., Song, S., Su, H., et al.: ShapeNet: An Information-rich 3D Model Repository. arXiv preprint arXiv:1512.03012 (2015) 9, 7
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[7]
In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2026) 7
Chen, X., Chu, F.J., Gleize, P., Liang, K.J., Sax, A., Tang, H., Wang, W., Guo, M., Hardin, T., Li, X., et al.: SAM 3D: 3Dfy anything in images. In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2026) 7
2026
-
[8]
In: European Conference on Computer Vision (ECCV) (2016) 9
Choy, C.B., Xu, D., Gwak, J., Chen, K., Savarese, S.: 3d-r2n2: A unified approach for single and multi-view 3d object reconstruction. In: European Conference on Computer Vision (ECCV) (2016) 9
2016
-
[9]
In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2022) 12, 7
Collins, J., Goel, S., Deng, K., Luthra, A., Xu, L., Gundogdu, E., Zhang, X., Vi- cente, T.F.Y., Dideriksen, T., Arora, H., et al.: ABO: Dataset and Benchmarks for Real-world 3D Object Understanding. In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2022) 12, 7
2022
-
[10]
In: International Conference on Com- puter Vision and Pattern Recognition (CVPR) (2020) 6, 7, 8
Deng, B., Genova, K., Yazdani, S., Bouaziz, S., Hinton, G., Tagliasacchi, A.: CvxNet: Learnable Convex Decomposition. In: International Conference on Com- puter Vision and Pattern Recognition (CVPR) (2020) 6, 7, 8
2020
-
[11]
Inter- national Conference on Learning Representations (ICLR) (2026) 4
Fedele, E., Engelmann, F., Huang, I., Litany, O., Pollefeys, M., Guibas, L.: Space- Control: Introducing Test-Time Spatial Control to 3D Generative Modeling. Inter- national Conference on Learning Representations (ICLR) (2026) 4
2026
-
[12]
In: International Conference on Computer Vision (ICCV) (2025) 1, 2, 3, 5, 6, 7, 9, 10, 11, 13, 14, 8
Fedele, E., Sun, B., Guibas, L., Pollefeys, M., Engelmann, F.: SuperDec: 3D Scene Decomposition with Superquadric Primitives. In: International Conference on Computer Vision (ICCV) (2025) 1, 2, 3, 5, 6, 7, 9, 10, 11, 13, 14, 8
2025
-
[13]
In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2026) 3
Ganeshan, A., Gadelha, M., Groueix, T., Chen, Z., Chaudhuri, S., Kim, V., Yifan, W., Ritchie, D.: Residual Primitive Fitting of 3D Shapes with SuperFrusta. In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2026) 3
2026
-
[14]
In: International Confer- ence on Computer Vision (ICCV) (2019) 3
Genova, K., Cole, F., Vlasic, D., Sarna, A., Freeman, W.T., Funkhouser, T.: Learn- ing shape templates with structured implicit functions. In: International Confer- ence on Computer Vision (ICCV) (2019) 3
2019
-
[15]
Jaklic, A., Leonardis, A., Solina, F.: Segmentation and Recovery of Superquadrics, vol. 20. Springer Science & Business Media (2000) 3, 4, 1
2000
-
[16]
In: ACM SIGGRAPH 2007 (2007) 12
Katz, S., Tal, A., Basri, R.: Direct visibility of point sets. In: ACM SIGGRAPH 2007 (2007) 12
2007
-
[17]
Kingma, D.P., Ba, J.: Adam: A method for stochastic optimization (2017) 10
2017
-
[18]
ACM Trans
Knapitsch, A., Park, J., Zhou, Q.Y., Koltun, V.: Tanks and temples: benchmarking large-scale scene reconstruction. ACM Trans. Graph. (2017) 9, 10, 11, 13, 14, 2, 3, 4 SuperFlex17
2017
-
[19]
In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2022) 2, 3, 9, 10, 13, 8
Liu, W., Wu, Y., Ruan, S., Chirikjian, G.S.: Robust and Accurate Superquadric Recovery: A Probabilistic Approach. In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2022) 2, 3, 9, 10, 13, 8
2022
-
[20]
In: International Conference on Computer Vi- sion and Pattern Recognition (CVPR)
Liu, W., Wu, Y., Ruan, S., Chirikjian, G.S.: Marching-primitives: Shape abstrac- tion from signed distance function. In: International Conference on Computer Vi- sion and Pattern Recognition (CVPR). pp. 8771–8780 (2023) 2, 3, 9, 10, 11, 8
2023
-
[21]
International Conference on Neural Information Processing Systems (NeurIPS) (2019) 5
Liu, Z., Tang, H., Lin, Y., Han, S.: Point-voxel cnn for efficient 3d deep learning. International Conference on Neural Information Processing Systems (NeurIPS) (2019) 5
2019
-
[22]
International Con- ference on Neural Information Processing Systems (NeurIPS) (2023) 4
Monnier, T., Austin, J., Kanazawa, A., Efros, A., Aubry, M.: Differentiable blocks world: Qualitative 3d decomposition by rendering primitives. International Con- ference on Neural Information Processing Systems (NeurIPS) (2023) 4
2023
-
[23]
In: International Conference on Computer Vision (ICCV) (2023) 12, 13
Pan, X., Charron, N., Yang, Y., Peters, S., Whelan, T., Kong, C., Parkhi, O., New- combe, R., Ren, Y.C.: Aria digital twin: A new benchmark dataset for egocentric 3d machine perception. In: International Conference on Computer Vision (ICCV) (2023) 12, 13
2023
-
[24]
In: International Conference on Computer Vision and Pattern Recognition (CVPR)
Paschalidou, D., Gool, L.V., Geiger, A.: Learning unsupervised hierarchical part decomposition of 3d objects from a single rgb image. In: International Conference on Computer Vision and Pattern Recognition (CVPR). pp. 1060–1070 (2020) 3, 4
2020
-
[25]
In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2021) 3
Paschalidou, D., Katharopoulos, A., Geiger, A., Fidler, S.: Neural parts: Learning expressive 3d shape abstractions with invertible neural networks. In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2021) 3
2021
-
[26]
In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2019) 2, 3, 4, 9, 10, 13, 8
Paschalidou, D., Ulusoy, A.O., Geiger, A.: Superquadrics revisited: Learning 3d shape parsing beyond cuboids. In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2019) 2, 3, 4, 9, 10, 13, 8
2019
-
[27]
In: International Conference on Neural Infor- mation Processing Systems (NeurIPS) (2017) 9
Qi, C.R., Yi, L., Su, H., Guibas, L.J.: Pointnet++: Deep hierarchical feature learn- ing on point sets in a metric space. In: International Conference on Neural Infor- mation Processing Systems (NeurIPS) (2017) 9
2017
-
[28]
ACM SIG- GRAPH 2026 Conference Papers (2026) 4
Sella, E., Phung, H., Amiel, N., Litany, O., Patashnik, O., Averbuch-Elor, H.: Prox-e: Fine-grained 3d shape editing via primitive-based abstractions. ACM SIG- GRAPH 2026 Conference Papers (2026) 4
2026
-
[29]
IEEE transactions on pattern analysis and machine intelligence (1990) 4
Solina, F., Bajcsy, R.: Recovery of parametric models from range images: The case for superquadrics with global deformations. IEEE transactions on pattern analysis and machine intelligence (1990) 4
1990
-
[30]
In: International Conference on Com- puter Vision and Pattern Recognition (CVPR) (2017) 3
Tulsiani, S., Su, H., Guibas, L.J., Efros, A.A., Malik, J.: Learning shape abstrac- tions by assembling volumetric primitives. In: International Conference on Com- puter Vision and Pattern Recognition (CVPR) (2017) 3
2017
-
[31]
In: International Conference on Com- puter Vision and Pattern Recognition (CVPR) (1998) 5
Van Dop, E.R., Regtien, P.P.: Fitting undeformed superquadrics to range data: improving model recovery and classification. In: International Conference on Com- puter Vision and Pattern Recognition (CVPR) (1998) 5
1998
-
[32]
In: International Conference on Robotics and Automation (ICRA) (2017) 4
Vezzani,G.,Pattacini,U.,Natale,L.:AGraspingApproachBasedonSuperquadric Models. In: International Conference on Robotics and Automation (ICRA) (2017) 4
2017
-
[33]
In: International Conference on Neural Information Processing Systems (NeurIPS) (2025) 7
Wang, R., Xu, S., Dong, Y., Deng, Y., Xiang, J., Lv, Z., Sun, G., Tong, X., Yang, J.: Moge-2: Accurate monocular geometry with metric scale and sharp details. In: International Conference on Neural Information Processing Systems (NeurIPS) (2025) 7
2025
-
[34]
In: ACM SIGGRAPH Asia 2025 Conference Papers (2025) 3 18 Tavernini et al
Wang, Y., Chen, W., Hu, Z., Zhang, R., Yin, Y., Wu, R., Luo, K., Qian, S., Ma, Y., Li, H., et al.: Light-SQ: Structure-aware Shape Abstraction with Superquadrics for Generated Meshes. In: ACM SIGGRAPH Asia 2025 Conference Papers (2025) 3 18 Tavernini et al
2025
-
[35]
ACM Transactions On Graphics (TOG) (2021) 2, 3, 9, 10, 13, 8
Yang, K., Chen, X.: Unsupervised learning for cuboid shape abstraction via joint segmentation from point clouds. ACM Transactions On Graphics (TOG) (2021) 2, 3, 9, 10, 13, 8
2021
-
[36]
In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2023) 12
Yeshwanth, C., Liu, Y.C., Nießner, M., Dai, A.: Scannet++: A high-fidelity dataset of 3d indoor scenes. In: International Conference on Computer Vision and Pattern Recognition (CVPR) (2023) 12
2023
-
[37]
Zhao, H., Brunke, L., Lagerquist, O., Zhou, S., Schoellig, A.P.: Sq-cbf: Signed distance functions for numerically stable superquadric-based safety filtering. arXiv preprint arXiv:2602.11049 (2026) 4 SuperFlex1 SuperFlex: Deformable Superquadrics for Point Cloud Decomposition Supplementary Material Abstract.We provide further explanations on the superquad...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.