DRL-Based Pose Control for Double-Ackermann Robots Under Actuation Uncertainties
Pith reviewed 2026-06-28 21:51 UTC · model grok-4.3
The pith
Incorporating observed actuation effects from Gazebo into PyBullet training produces DRL policies for double-Ackermann pose control that reach 92 percent success and transfer to real robots without tuning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A sim-to-sim-to-real pipeline that records actuation uncertainties in Gazebo and injects them into PyBullet training environments allows multi-environment DRL (SAC and CrossQ) to learn pose-control policies for double-Ackermann robots that maintain 92 percent success in Gazebo (69 percent under stricter thresholds) and transfer directly to the physical platform.
What carries the argument
The sim-to-sim-to-real method that embeds Gazebo-measured actuation effects into PyBullet training so that policies learn robustness to those discrepancies before deployment.
If this is right
- Simplified actuation models during training produce policies that collapse from 100 percent to 25 percent success when evaluated in Gazebo under stricter thresholds.
- Multi-environment DRL with embedded actuation effects raises Gazebo success to 92 percent and keeps 69 percent under stricter thresholds.
- The resulting policies transfer to the real robot with no additional tuning or retraining.
- The same pipeline can be applied to other non-holonomic mobile robots that exhibit similar actuation modeling gaps.
Where Pith is reading between the lines
- The approach may reduce the need for real-world data collection or fine-tuning in other DRL robot control tasks that suffer from actuator mismatch.
- Extending the method to additional simulators or to online adaptation could further close remaining gaps between simulation and hardware.
- If the actuation measurements prove stable across robot instances, the same trained policy might transfer across multiple physical units without per-robot recalibration.
Load-bearing premise
Actuation uncertainties measured in Gazebo are close enough to those on the target real robot that embedding them into PyBullet will produce policies that generalize to hardware.
What would settle it
Run the learned policy on the physical double-Ackermann robot under the same pose-control task and record whether success rate remains near the 69-92 percent range reported in Gazebo.
Figures
read the original abstract
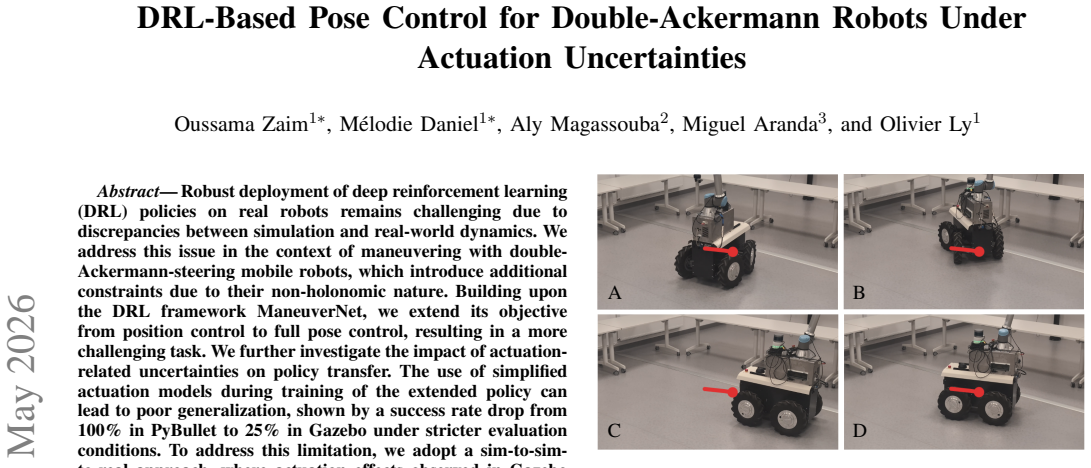
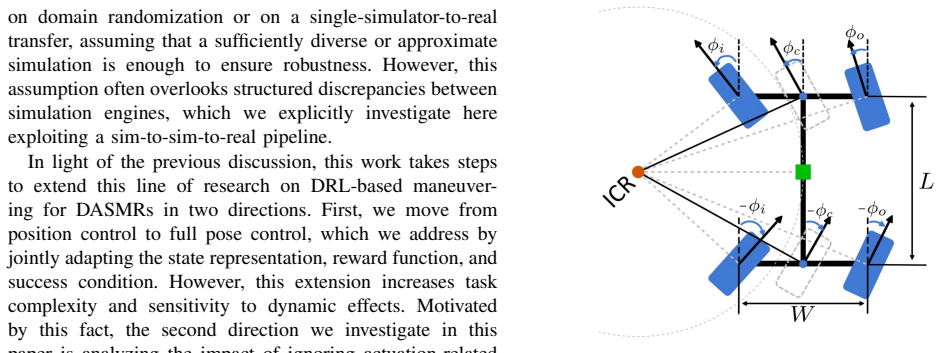
Robust deployment of deep reinforcement learning (DRL) policies on real robots remains challenging due to discrepancies between simulation and real-world dynamics. We address this issue in the context of maneuvering with double-Ackermann-steering mobile robots, which introduce additional constraints due to their non-holonomic nature. Building upon the DRL framework ManeuverNet, we extend its objective from position control to full pose control, resulting in a more challenging task. We further investigate the impact of actuation-related uncertainties on policy transfer. The use of simplified actuation models during training of the extended policy can lead to poor generalization, shown by a success rate drop from 100% in PyBullet to 25% in Gazebo under stricter evaluation conditions. To address this limitation, we adopt a sim-to-sim-to-real approach, where actuation effects observed in Gazebo are incorporated into the PyBullet training environment. Using multi-environment DRL with SAC and CrossQ, we learn policies that remain robust despite modeling inaccuracies. This approach can significantly reduce the performance gap across simulators, achieving up to 92% success rate in Gazebo and maintaining 69% under stricter thresholds, with successful transfer to a real robot without additional tuning.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends the ManeuverNet DRL framework from position to full pose control for double-Ackermann-steering robots and proposes a sim-to-sim-to-real method that extracts actuation uncertainties from Gazebo and injects them into PyBullet training via multi-environment SAC and CrossQ policies; it reports that simplified actuation models cause success rates to drop from 100% (PyBullet) to 25% (Gazebo) while the augmented approach reaches 92% in Gazebo (69% under stricter thresholds) with successful untuned transfer to a physical robot.
Significance. If the empirical claims hold after proper statistical reporting, the work provides a concrete, reproducible recipe for reducing sim-to-real gaps in non-holonomic mobile robots by explicitly modeling actuation discrepancies, which could be adopted in other DRL robotics pipelines that currently rely on idealized simulators.
major comments (2)
- [Abstract] Abstract: quantitative success rates (92% Gazebo, 69% stricter, 25% drop with simplified models) are stated without any mention of trial counts, run-to-run variance, confidence intervals, or statistical tests, preventing verification of the central performance claims.
- [Abstract] Abstract, final paragraph: the sim-to-sim-to-real claim that Gazebo-derived actuation statistics suffice for real-robot transfer rests on the untested assumption that these statistics capture the dominant discrepancies; no quantitative trajectory-matching metrics or logged real-robot data are supplied to support that the augmented PyBullet distribution matches the target hardware.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on statistical reporting and validation of the sim-to-sim-to-real transfer. We address each major comment below and indicate the corresponding revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract: quantitative success rates (92% Gazebo, 69% stricter, 25% drop with simplified models) are stated without any mention of trial counts, run-to-run variance, confidence intervals, or statistical tests, preventing verification of the central performance claims.
Authors: We agree that the abstract omits trial counts, variance, and statistical details. The full manuscript evaluates policies over 100 trials per condition with reported standard deviations, but these are not summarized in the abstract. We will revise the abstract to include the number of trials, observed variance across runs, and note that performance differences are statistically significant. revision: yes
-
Referee: [Abstract] Abstract, final paragraph: the sim-to-sim-to-real claim that Gazebo-derived actuation statistics suffice for real-robot transfer rests on the untested assumption that these statistics capture the dominant discrepancies; no quantitative trajectory-matching metrics or logged real-robot data are supplied to support that the augmented PyBullet distribution matches the target hardware.
Authors: We acknowledge that the real-robot transfer is presented qualitatively without quantitative trajectory-matching metrics or logged hardware data. The quantitative evidence is limited to the sim-to-sim gap reduction (100% to 25% vs. 92%/69%). We will revise the abstract to qualify the real-robot result as an untuned qualitative demonstration of feasibility while emphasizing that the core actuation-augmentation method is validated by the Gazebo-PyBullet experiments. revision: yes
Circularity Check
No circularity: empirical success rates are measured outcomes, not derived quantities
full rationale
The paper reports measured success rates (92% in Gazebo, 69% under stricter thresholds, real-robot transfer) obtained by training SAC/CrossQ policies in augmented PyBullet and evaluating in Gazebo/real hardware. No equations, fitted parameters, or predictions are presented that reduce the reported metrics to quantities defined by the paper's own inputs. The sim-to-sim-to-real method is a procedural choice whose validity is tested empirically rather than assumed by construction. Self-citation of ManeuverNet is present but does not carry the central performance claims.
Axiom & Free-Parameter Ledger
free parameters (2)
- SAC and CrossQ hyperparameters (learning rates, network sizes, reward weights)
- Actuation model parameters extracted from Gazebo
axioms (2)
- domain assumption Actuation uncertainties observed in Gazebo are representative of the real robot's behavior.
- standard math Standard RL convergence assumptions for SAC and CrossQ hold under the multi-environment training regime.
Reference graph
Works this paper leans on
-
[1]
Application of Deep Reinforce- ment Learning for Tracking Control of 3WD Omnidirectional Mobile Robot,
A. Mehmood, I. Shaikh, and A. Ali, “Application of Deep Reinforce- ment Learning for Tracking Control of 3WD Omnidirectional Mobile Robot,”Inf. Technol. Control, vol. 50, no. 3, pp. 507–521, 2021
2021
-
[2]
Dual-Layer Reinforcement Learning for Quadruped Robot Locomotion and Speed Control in Complex Envi- ronments,
Y . Zhang, J. Zeng,et al., “Dual-Layer Reinforcement Learning for Quadruped Robot Locomotion and Speed Control in Complex Envi- ronments,”Appl. Sci., vol. 14, no. 19, 2024, Art. no. 8697
2024
-
[3]
FootstepNet: An Efficient Actor-Critic Method for Fast On-line Bipedal Footstep Planning and Forecasting,
C. Gaspard, G. Passault,et al., “FootstepNet: An Efficient Actor-Critic Method for Fast On-line Bipedal Footstep Planning and Forecasting,” inIEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2024, pp. 13 749– 13 756
2024
-
[4]
Design of an Ackermann-type Steering Mechanism,
J.-S. Zhao, X. Liu,et al., “Design of an Ackermann-type Steering Mechanism,”Proc. Inst. Mech. Eng., vol. 227, no. 11, pp. 2549–2562, 2013
2013
-
[5]
Siegwart and I
R. Siegwart and I. R. Nourbakhsh,Introduction to Autonomous Mobile Robots. MIT Press, 2004
2004
-
[6]
Analysis and Experimental Verification for Dynamic Modeling of A Skid-Steered Wheeled Vehicle,
W. Yu, O. Y . Chuy,et al., “Analysis and Experimental Verification for Dynamic Modeling of A Skid-Steered Wheeled Vehicle,”IEEE Trans. Robot. (T-RO), vol. 26, no. 2, pp. 340–353, 2010
2010
-
[7]
K. Deflesselle, M. Daniel,et al., “ManeuverNet: A Soft Actor- Critic Framework for Precise Maneuvering of Double-Ackermann- Steering Robots with Optimized Reward Functions,”CoRR, vol. abs/2602.14726, 2026, Accepted at IEEE ICRA 2026
arXiv 2026
-
[8]
Kinodynamic Trajectory Optimization and Control for Car-Like Robots,
C. R ¨osmann, F. Hoffmann, and T. Bertram, “Kinodynamic Trajectory Optimization and Control for Car-Like Robots,” inIEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2017, pp. 5681–5686
2017
-
[9]
Timed-Elastic Bands for Manipulation Motion Planning,
B. Magyar, N. Tsiogkas,et al., “Timed-Elastic Bands for Manipulation Motion Planning,”IEEE Robot. Autom. Lett. (RA-L), vol. 4, no. 4, pp. 3513–3520, 2019
2019
-
[10]
A Comparison Study between Traditional and Deep-Reinforcement-Learning-Based Algorithms for Indoor Autonomous Navigation in Dynamic Scenarios,
D. Arce, J. Solano, and C. Beltr ´an, “A Comparison Study between Traditional and Deep-Reinforcement-Learning-Based Algorithms for Indoor Autonomous Navigation in Dynamic Scenarios,”Sensors, vol. 23, no. 24, 2023, Art. no. 9672
2023
-
[11]
Towards Safe Maneuvering of Double-Ackermann-Steering Robots with a Soft Actor-Critic Frame- work,
K. Deflesselle, M. Daniel,et al., “Towards Safe Maneuvering of Double-Ackermann-Steering Robots with a Soft Actor-Critic Frame- work,” inSIA V-FM2L workshop organized within IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025
2025
-
[12]
Sim-to-Real Transfer in Deep Reinforcement Learning for Robotics: A Survey,
W. Zhao, J. P. Queralta, and T. Westerlund, “Sim-to-Real Transfer in Deep Reinforcement Learning for Robotics: A Survey,” inIEEE Symp. Ser . Comput. Intell. (SSCI), 2020, pp. 737–744
2020
-
[13]
Sim-to-Real Transfer for Biped Locomotion,
W. Yu, V . C. V . Kumar,et al., “Sim-to-Real Transfer for Biped Locomotion,” inIEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2019, pp. 3503–3510
2019
-
[14]
Learning agile and dynamic motor skills for legged robots,
J. Hwangbo, J. Lee,et al., “Learning agile and dynamic motor skills for legged robots,”Sci. Robot., vol. 4, no. 26, 2019, Art. no. eaau5872
2019
-
[15]
Impact of Static Friction on Sim2Real in Robotic Reinforcement Learning,
X. Hu, Q. Sun,et al., “Impact of Static Friction on Sim2Real in Robotic Reinforcement Learning,” inIEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025, pp. 17 107–17 114
2025
-
[16]
R. S. Sutton and A. G. Barto,Reinforcement Learning - An Introduc- tion, 2nd ed. MIT Press, 2018
2018
-
[17]
Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor,
T. Haarnoja, A. Zhou,et al., “Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor,” in PMLR Int. Conf. Mach. Learn. (ICML), vol. 80, 2018, pp. 1856–1865
2018
-
[18]
CrossQ: Batch Normalization in Deep Reinforcement Learning for Greater Sample Efficiency and Simplicity,
A. Bhatt, D. Palenicek,et al., “CrossQ: Batch Normalization in Deep Reinforcement Learning for Greater Sample Efficiency and Simplicity,” inInt. Conf. Learn. Represent. (ICLR), 2024, pp. 55 293– 55 311
2024
-
[19]
Robotic Control of the Defor- mation of Soft Linear Objects Using Deep Reinforcement Learning,
M. Daniel Zakaria, M. Aranda,et al., “Robotic Control of the Defor- mation of Soft Linear Objects Using Deep Reinforcement Learning,” inIEEE Int. Conf. Autom. Sci. Eng. (CASE), 2022, pp. 1516–1522
2022
-
[20]
On Evaluation of Embodied Navigation Agents,
P. Anderson, A. X. Chang,et al., “On Evaluation of Embodied Navigation Agents,”CoRR, vol. abs/1807.06757, 2018
Pith/arXiv arXiv 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.