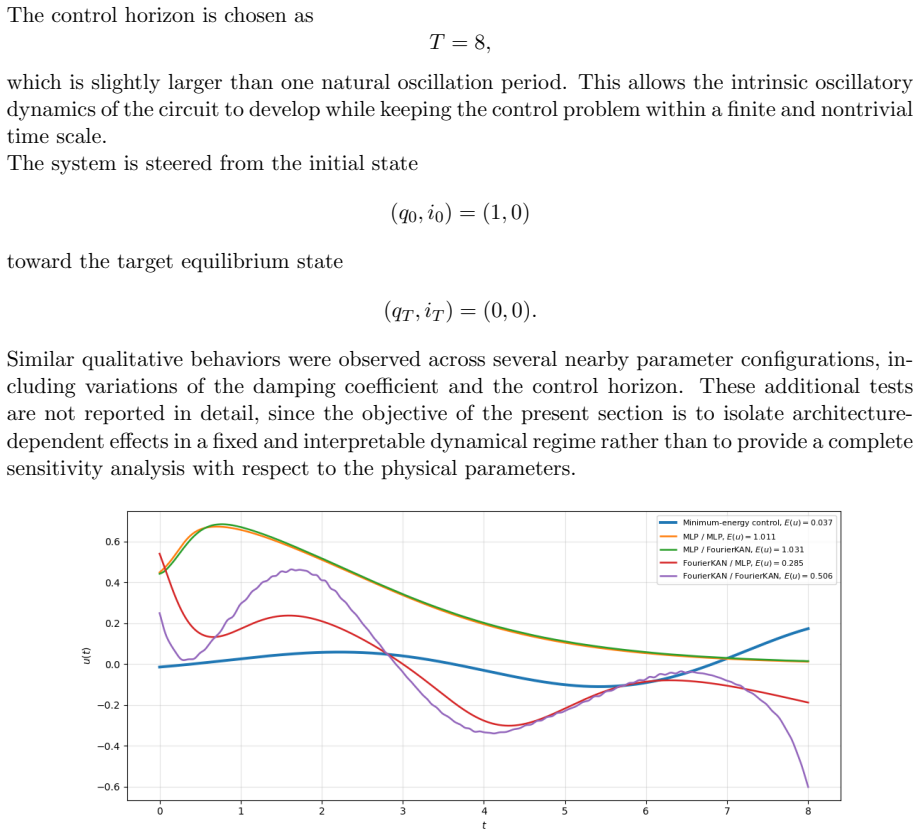
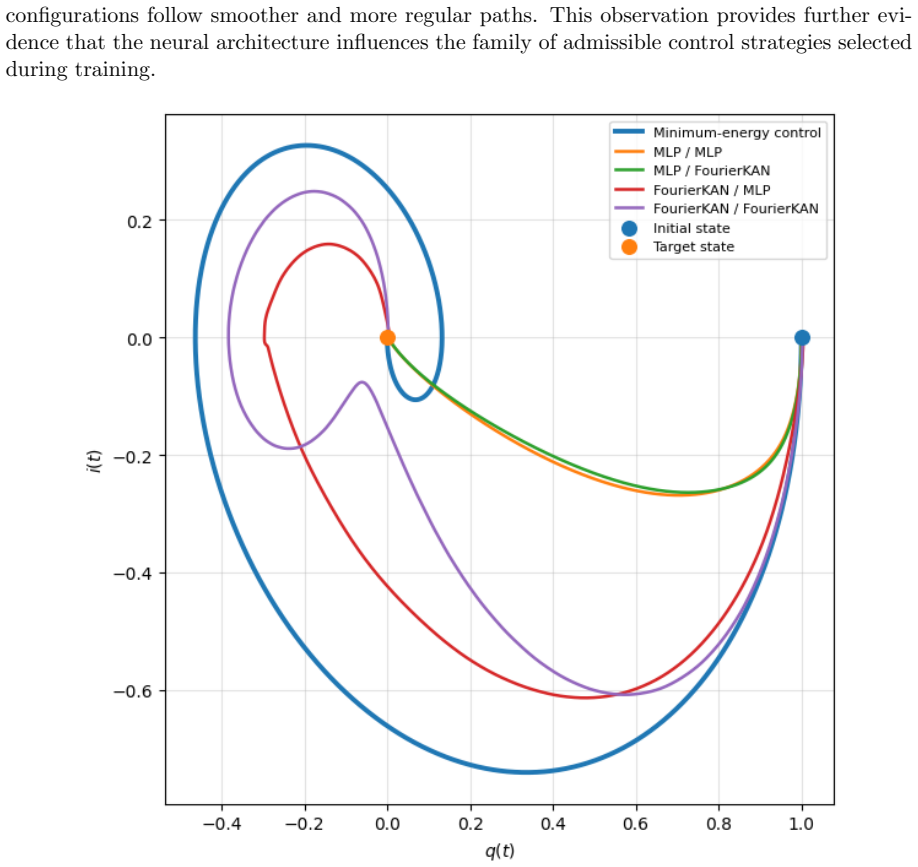
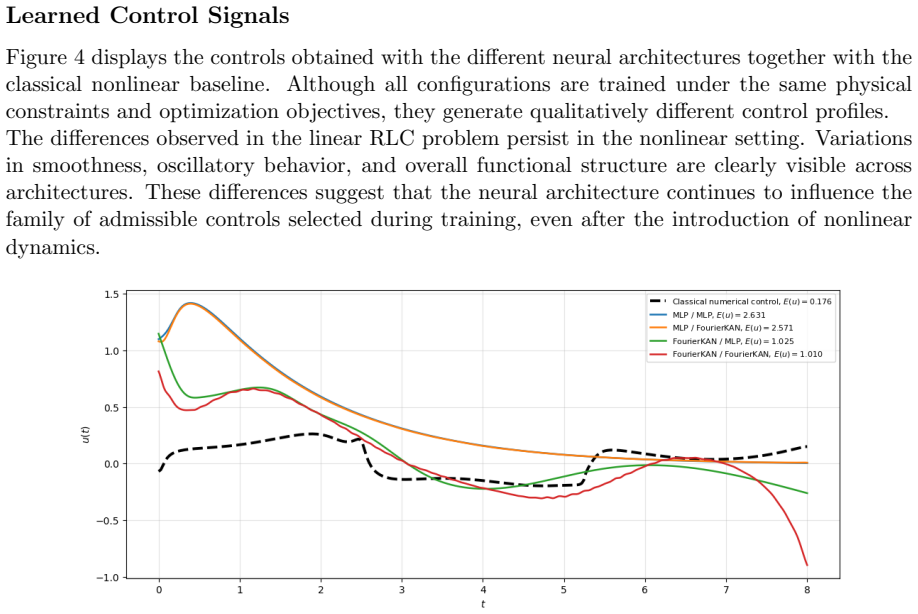
Neural Architectures as Functional Priors in Physics-Informed Control Problems
Pith reviewed 2026-06-27 06:09 UTC · model grok-4.3
The pith
Neural architectures function as distinct functional priors, producing controls with different spectral and smoothness properties in physics-informed ODE control problems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
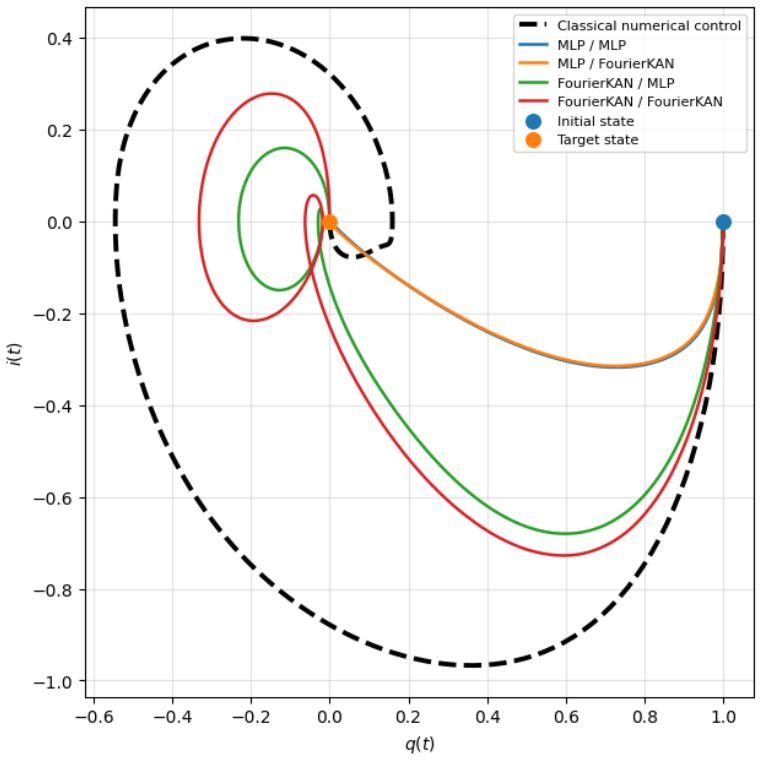
The authors establish that in PINN approaches to controlling linear and nonlinear dynamical systems, the choice between multilayer perceptrons and Fourier-based KAN-like networks generates qualitatively distinct controls. These controls differ in spectral structure, smoothness, energy distribution, and phase-space behavior, even when governing equations, loss functions, initial and target states, and all training parameters are the same. Fourier-based architectures tend to yield trajectories with richer oscillatory content, while smoother architectures produce more regular and energetically efficient controls. This points to an implicit functional specialization where architectures handle di
What carries the argument
Neural architectures serving as implicit functional priors that bias the learned control functions toward particular frequency contents and regularity properties.
If this is right
- Fourier-based architectures systematically favor controls with higher oscillatory content.
- Smoother low-frequency architectures generate controls that are more energetically efficient.
- The phenomenon of functional specialization emerges when architectures have freedom to shape control structure.
- These effects appear consistently in both linear electrical circuits and nonlinear oscillators.
Where Pith is reading between the lines
- Hybrid networks might combine the strengths of different architectures for improved control performance.
- The specialization effect could be exploited in designing architecture-aware control strategies for more complex systems.
- Similar architecture-dependent biases may appear in other physics-informed learning tasks beyond control.
Load-bearing premise
The observed differences in controls stem from the distinct functional priors induced by the architectures rather than from differences in optimization dynamics or random initialization.
What would settle it
If repeated optimizations with varied random seeds for a single architecture produce a range of control properties comparable to those seen across different architectures, the attribution to architectural priors would be undermined.
Figures
read the original abstract
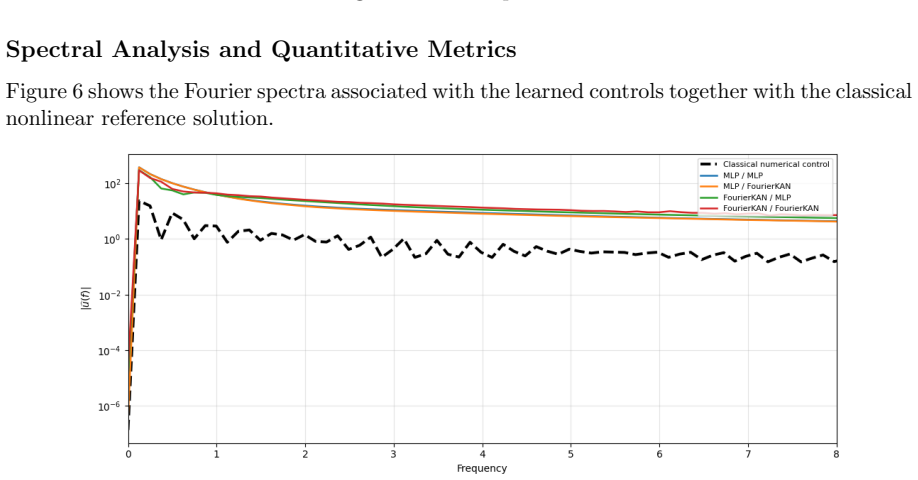
In this work we investigate the role of neural architectures as implicit functional priors in control problems governed by ordinary differential equations. Rather than focusing on highly complex problems, our objective is to investigate architecture-dependent effects in controlled dynamical systems within the simplest physically interpretable settings possible. In particular, we study a controlled linear RLC electrical circuit and a nonlinear Duffing-type dynamical system. Both systems are analyzed first through classical optimal-control formulations and later through PINN-based approaches. We compare different combinations of multilayer perceptrons (MLPs) and Fourier-based KAN-like architectures, and analyze their influence on the resulting controls. The numerical experiments suggest that different architectural choices systematically generate qualitatively distinct controls, even under identical governing equations, loss functionals, initial and target states, training parameters and physical constraints. Significant differences appear in the spectral structure, smoothness, energy distribution, and phase-space behavior of the learned solutions. A central observation of this work is the emergence of a functional specialization phenomenon when the neural architectures are allowed sufficient freedom to shape the structure of the learned controls. More specifically, in the systems considered here, Fourier-based architectures tend to produce trajectories with richer oscillatory content, whereas smoother low-frequency-biased architectures tend to generate more regular and energetically efficient controls. This suggests that different functional components of the control problem may be handled more efficiently by different neural architectures, leading to an implicit specialization between state representation and control generation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies neural architectures as implicit functional priors in PINN formulations of optimal control for ODEs. It compares MLPs and Fourier-based KAN-like networks on a linear RLC circuit and a nonlinear Duffing oscillator, reporting that identical problem data, losses, and training settings nevertheless yield controls with systematically different spectral content, smoothness, energy distribution, and phase-space structure. The central claim is the emergence of functional specialization, with Fourier architectures favoring oscillatory content and smoother architectures favoring energetically efficient, low-frequency solutions.
Significance. If the reported differences are shown to be architecture-driven rather than optimization artifacts, the work would provide concrete evidence that network inductive bias shapes the reachable control manifold in physics-informed settings. The choice of minimal, physically interpretable test problems is appropriate for isolating the effect. The manuscript does not yet supply the quantitative controls (multiple independent runs, intra- versus inter-architecture variance statistics, or fixed-seed protocols) needed to substantiate the specialization claim.
major comments (2)
- [Abstract / Numerical experiments] Abstract and numerical-experiments section: the assertion that 'different architectural choices systematically generate qualitatively distinct controls' under 'identical ... training parameters' is load-bearing for the functional-prior thesis, yet no mention is made of fixed random seeds, multiple independent optimizations per architecture, or statistical comparison of intra- versus inter-architecture variance. Without such controls, observed spectral and smoothness differences could lie within the range produced by stochastic gradient noise alone.
- [Abstract] The claim of 'emergence of a functional specialization phenomenon' requires evidence that the observed specialization is reproducible and exceeds what a single architecture produces across random initializations. The current description supplies only qualitative descriptions of 'richer oscillatory content' and 'more regular ... controls' without quantitative metrics or error bars.
minor comments (1)
- [Methods] Notation for the two architectures (MLP versus Fourier KAN-like) should be introduced with explicit layer counts, activation functions, and frequency scaling parameters so that the 'identical training parameters' statement can be verified.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which correctly identify the need for stronger statistical validation of the architecture-driven specialization claims. We agree that the current presentation relies on representative single-run results and will revise the manuscript to include multiple independent optimizations, fixed-seed protocols, and quantitative intra- versus inter-architecture comparisons.
read point-by-point responses
-
Referee: [Abstract / Numerical experiments] Abstract and numerical-experiments section: the assertion that 'different architectural choices systematically generate qualitatively distinct controls' under 'identical ... training parameters' is load-bearing for the functional-prior thesis, yet no mention is made of fixed random seeds, multiple independent optimizations per architecture, or statistical comparison of intra- versus inter-architecture variance. Without such controls, observed spectral and smoothness differences could lie within the range produced by stochastic gradient noise alone.
Authors: We acknowledge this limitation. The reported results used single representative runs per architecture to highlight qualitative distinctions under matched problem data and training settings. In the revised version we will rerun all experiments with multiple independent random seeds (at least 10 per architecture), report means and standard deviations of spectral content, total variation, and control energy, and include statistical comparisons (e.g., t-tests or ANOVA) demonstrating that inter-architecture differences exceed intra-architecture variance. These additions will appear in the numerical experiments section and be referenced from the abstract. revision: yes
-
Referee: [Abstract] The claim of 'emergence of a functional specialization phenomenon' requires evidence that the observed specialization is reproducible and exceeds what a single architecture produces across random initializations. The current description supplies only qualitative descriptions of 'richer oscillatory content' and 'more regular ... controls' without quantitative metrics or error bars.
Authors: We agree that the specialization claim requires quantitative reproducibility evidence. The revision will augment the abstract and results with explicit metrics (Fourier coefficient norms, integrated control effort, trajectory regularity indices) together with error bars computed across the multiple runs. These will show that the richer oscillatory content of Fourier architectures and the lower-energy regularity of smoother architectures are statistically distinguishable from the variability obtainable from any single architecture under different initializations. revision: yes
Circularity Check
No circularity: claim rests on direct numerical comparisons without self-referential derivations
full rationale
The paper reports empirical observations from PINN experiments on two dynamical systems, comparing MLP and Fourier-based architectures under fixed equations, losses, states, and training parameters. No derivations, fitted parameters renamed as predictions, or self-citation chains are present in the abstract or described methodology. The functional-specialization claim is an interpretation of observed differences in spectral structure and energy, not a quantity defined by construction from the same data. External validity concerns (e.g., stochasticity) exist but do not constitute circularity per the defined criteria.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Raissi, P
M. Raissi, P. Perdikaris, and G. E. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707, 2019
2019
-
[2]
Understanding and mitigating gradient flow pathologies in physics-informed neural networks.SIAM Journal on Scientific Computing, 43(5):A3055–A3081, 2021
Sifan Wang, Yujun Teng, and Paris Perdikaris. Understanding and mitigating gradient flow pathologies in physics-informed neural networks.SIAM Journal on Scientific Computing, 43(5):A3055–A3081, 2021
2021
-
[3]
Sifan Wang, Xinling Yu, and Paris Perdikaris. When and why pinns fail to train: A neural tangent kernel perspective.arXiv preprint arXiv:2007.14527, 2020
arXiv 2007
-
[4]
Z. Liu, Y. Wang, S. Vaidya, F. Ruehle, J. Halverson, M. Soljaˇ ci´ c, T. Y. Hou, and M. Tegmark. Kan: Kolmogorov-arnold networks.arXiv preprint arXiv:2404.19756, 2024
Pith/arXiv arXiv 2024
-
[5]
Dzimah, Fernando Carlos L´ opez Hern´ andez, Sonia Rubio Herranz, and An- tonio L´ opez Montes
Salvador K. Dzimah, Fernando Carlos L´ opez Hern´ andez, Sonia Rubio Herranz, and An- tonio L´ opez Montes. A unified benchmark of physics-informed neural networks and kolmogorov–arnold networks for ordinary and partial differential equations.arXiv preprint arXiv:2602.15068, 2026
arXiv 2026
-
[6]
Implicit regularization in deep learning.arXiv preprint arXiv:1709.01953, 2017
Behnam Neyshabur. Implicit regularization in deep learning.arXiv preprint arXiv:1709.01953, 2017
Pith/arXiv arXiv 2017
-
[7]
Rahaman, A
N. Rahaman, A. Baratin, D. Arpit, F. Draxler, M. Lin, F. Hamprecht, Y. Bengio, and A. Courville. On the spectral bias of neural networks. InProceedings of the 36th Interna- tional Conference on Machine Learning (ICML), pages 5301–5310, 2019
2019
-
[8]
Frequency principle: Fourier anal- ysis sheds light on deep neural networks.Communications in Computational Physics, 28(5):1746–1767, 2020
Zhi-Qin John Xu, Yaoyu Zhang, and Yanyang Xiao. Frequency principle: Fourier anal- ysis sheds light on deep neural networks.Communications in Computational Physics, 28(5):1746–1767, 2020
2020
-
[9]
Neural tangent kernel: Convergence and generalization in neural networks.Advances in Neural Information Processing Systems, 31, 2018
Arthur Jacot, Franck Gabriel, and Cl´ ement Hongler. Neural tangent kernel: Convergence and generalization in neural networks.Advances in Neural Information Processing Systems, 31, 2018. 16
2018
-
[10]
K. Zhou, J. C. Doyle, and K. Glover.Robust and Optimal Control. Prentice Hall, 1996
1996
-
[11]
Brunton and J
Steven L. Brunton and J. Nathan Kutz.Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control. Cambridge University Press, 2 edition, 2022
2022
-
[12]
Strogatz.Nonlinear Dynamics and Chaos
Steven H. Strogatz.Nonlinear Dynamics and Chaos. CRC Press, 2 edition, 2018
2018
-
[13]
A survey on kolmogorov-arnold network.ACM Computing Surveys, 58(2):1–35, 2025
Shriyank Somvanshi, Syed Aaqib Javed, Md Monzurul Islam, Diwas Pandit, and Subasish Das. A survey on kolmogorov-arnold network.ACM Computing Surveys, 58(2):1–35, 2025. 17
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.