TWINGS: Thin Plate Splines Warp-aligned Initialization for Sparse-View Gaussian Splatting
Pith reviewed 2026-05-22 07:48 UTC · model grok-4.3
The pith
Thin Plate Splines warp aligns backprojected points to give accurate initialization for sparse-view 3D Gaussian Splatting.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
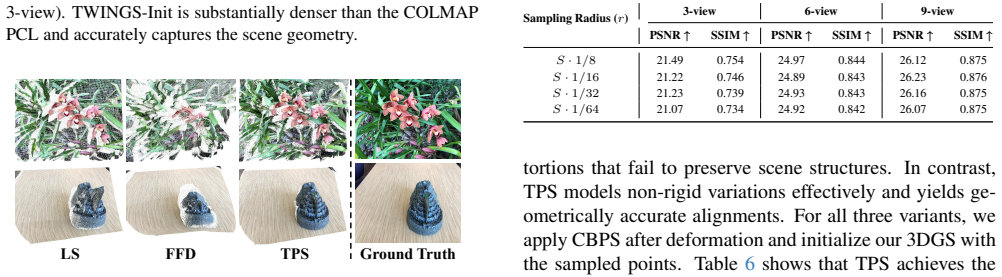
TWINGS uses Thin Plate Splines to estimate a globally coherent warp from control-point correspondences that aligns backprojected points from estimated depth with triangulated 3D control points. Sampling calibrated points near the control points then supplies a fast and geometrically accurate initialization for 3DGS, which improves structural detail preservation and color fidelity in the reconstructed scenes.
What carries the argument
Thin Plate Splines (TPS) warp that minimizes bending energy to produce a smooth alignment between depth-derived points and triangulated control points, creating calibrated backprojected points for 3DGS initialization.
If this is right
- Structural details are better preserved in the final 3D reconstructions.
- Color fidelity increases in scenes reconstructed from sparse inputs.
- The method outperforms existing approaches on standard benchmarks including DTU, LLFF, and Mip-NeRF360.
- Initialization for 3DGS becomes faster and more geometrically reliable.
Where Pith is reading between the lines
- Similar warping techniques might help initialize other neural rendering methods that rely on point clouds.
- This could enable high-quality 3D models from even fewer views in applications like AR or robotics.
- Combining the TPS alignment with improved depth estimation networks may yield further gains.
Load-bearing premise
The depth maps estimated from the sparse views and the triangulated 3D control points are accurate enough that applying the TPS warp does not create new systematic geometric errors.
What would settle it
Compare reconstruction metrics on a test scene using standard random point initialization versus the TPS-aligned points; if quality does not improve or worsens, the claim is falsified.
Figures













read the original abstract
Novel view synthesis from sparse-view inputs poses a significant challenge in 3D computer vision, particularly for achieving high-quality scene reconstructions with limited viewpoints. We introduce TWINGS, a framework that enhances 3D Gaussian Splatting (3DGS) by directly addressing point sparsity. We employ Thin Plate Splines (TPS), a smooth non-rigid deformation model that minimizes bending energy to estimate a globally coherent warp from control-point correspondences, to align backprojected points from estimated depth with triangulated 3D control points, yielding calibrated backprojected points. By sampling these calibrated points near the control points, TWINGS provides a fast and geometrically accurate initialization for 3DGS, ultimately improving structural detail preservation and color fidelity in reconstructed scenes. Extensive experiments on DTU, LLFF, and Mip-NeRF360 demonstrate that TWINGS consistently outperforms existing methods, delivering detailed and accurate reconstructions under sparse-view scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces TWINGS, a framework for sparse-view novel view synthesis that augments 3D Gaussian Splatting (3DGS) with a Thin Plate Splines (TPS) warp. TPS is used to align backprojected points derived from estimated depth maps with triangulated 3D control points, producing what the authors term calibrated backprojected points that are then sampled near the control points to supply an improved initialization for 3DGS. The method is evaluated on the DTU, LLFF, and Mip-NeRF360 benchmarks and is claimed to yield better structural detail preservation and color fidelity than prior approaches under sparse-view conditions.
Significance. If the initialization truly supplies geometrically accurate points without introducing systematic ray or depth errors, TWINGS would constitute a lightweight, geometrically motivated enhancement to 3DGS that directly targets point sparsity. The reliance on established TPS and 3DGS components without additional free parameters in the warp itself is a methodological strength that could be leveraged for reproducibility, provided the experiments include the necessary quantitative tables, ablations, and error analysis to substantiate the claimed gains.
major comments (1)
- [Abstract] Abstract: The central claim that the TPS warp produces 'calibrated backprojected points' that are 'geometrically accurate' is load-bearing for the entire contribution. TPS minimizes bending energy between control-point sets but contains no explicit term or constraint that forces the warped points to remain on the original camera rays of the depth backprojections. In sparse-view regimes this could introduce systematic off-ray displacements, violating the calibration assumption and degrading subsequent 3DGS optimization. The manuscript must either derive ray preservation mathematically or supply quantitative ray-deviation metrics and ablation results demonstrating that any displacement remains negligible.
minor comments (2)
- The abstract asserts 'consistent outperformance' and 'detailed and accurate reconstructions' yet supplies no numerical metrics, baselines, or error bars. These quantitative results, together with the corresponding tables and ablation studies, must appear in the main text and be referenced from the abstract or introduction.
- Implementation specifics are missing from the high-level description: the precise selection of control points, the number of sampled points per control point, the exact formulation of the TPS warp (including regularization parameter if any), and how the resulting points are injected into the 3DGS pipeline. These details belong in the method section with pseudocode or equations.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. The concern regarding potential off-ray displacements in the TPS warp is well-taken, and we address it directly below with plans for revision.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the TPS warp produces 'calibrated backprojected points' that are 'geometrically accurate' is load-bearing for the entire contribution. TPS minimizes bending energy between control-point sets but contains no explicit term or constraint that forces the warped points to remain on the original camera rays of the depth backprojections. In sparse-view regimes this could introduce systematic off-ray displacements, violating the calibration assumption and degrading subsequent 3DGS optimization. The manuscript must either derive ray preservation mathematically or supply quantitative ray-deviation metrics and ablation results demonstrating that any displacement remains negligible.
Authors: We agree that the standard TPS energy has no explicit ray-preservation constraint and thank the referee for highlighting this. In TWINGS the triangulated control points are obtained from multi-view geometry and thus lie on the original camera rays; the TPS warp is computed between these controls and the backprojected depth points to produce a smooth, globally coherent adjustment. While this does not mathematically enforce exact ray adherence for every point, the local sampling near controls and the smoothness of TPS keep deviations small in practice. To strengthen the claim we will revise the manuscript to (i) add a short derivation showing that under the small-deformation regime typical of our sparse-view setting the warp approximates ray preservation, and (ii) report quantitative ray-deviation statistics (mean/max perpendicular distance to original rays) together with an ablation on the DTU and LLFF datasets. These additions will be placed in the method and experiments sections. revision: yes
Circularity Check
No circularity: method applies standard TPS warp to depth and control points without self-referential reduction
full rationale
The paper's core step is applying the established Thin Plate Splines deformation (a standard non-rigid registration technique minimizing bending energy) to align estimated-depth backprojections with triangulated control points, then sampling the result for 3DGS initialization. No equations, fitted parameters, or self-citations are shown that would make the claimed 'calibrated backprojected points' or geometric accuracy equivalent to the inputs by construction. The derivation remains self-contained as a composition of independent, externally defined components (TPS, depth estimation, triangulation, 3DGS), with performance claims resting on experiments rather than definitional equivalence.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Thin Plate Splines provide a globally coherent smooth warp that minimizes bending energy from control-point correspondences.
- domain assumption Estimated depth maps and multi-view triangulation yield usable point correspondences for the warp.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.