Consent Chain Degradation in Embodied Multi-Agent Systems: Bridging the Gap Between AI Agent Governance and Robot Ethics
Pith reviewed 2026-05-21 00:35 UTC · model grok-4.3
The pith
Human consent erodes in specificity, validity, and scope when robots delegate tasks through chains of other embodied agents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
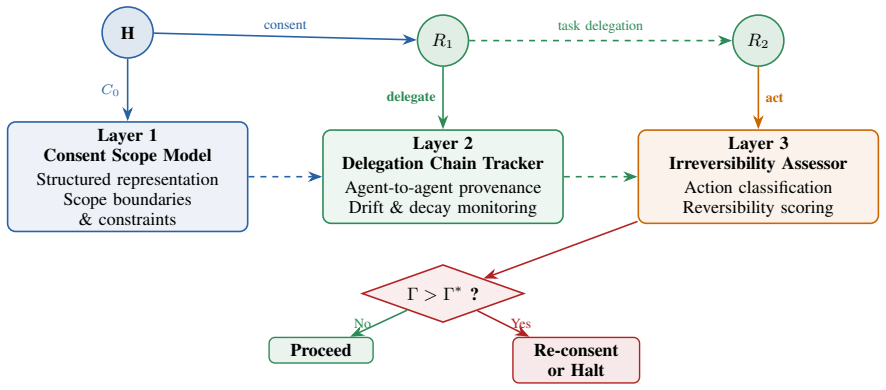
Consent chain degradation (CCD) occurs in embodied multi-agent systems when authority passes through robot-to-robot delegations, causing measurable loss of the specificity, validity, and scope of the original human consent; the CoRVE framework counters this by combining consent scope modeling, delegation chain tracking, and physical irreversibility assessment, as shown in three domain scenarios and a regulatory gap analysis.
What carries the argument
Consent chain degradation (CCD), the process by which consent attributes erode across multi-robot delegation chains, carried by the CoRVE governance architecture that performs runtime verification of scope, tracking, and irreversibility.
If this is right
- Healthcare delegation chains may trigger actions that exceed a patient's stated consent if scope is not re-verified at each handoff.
- Domestic robots handing tasks to other devices can silently expand privacy or access scopes beyond the homeowner's original grant.
- Industrial systems require explicit irreversibility checks before any physical delegation to prevent unrecoverable changes.
- The EU AI Act and GDPR leave chain-level consent erosion unaddressed, creating compliance gaps for multi-agent deployments.
- New standards for logging delegation provenance and consent state become necessary for liability assignment.
Where Pith is reading between the lines
- Treating consent as a runtime state rather than a static permission could apply to collaborative human-robot teams beyond pure robot chains.
- The framework implies that future robot communication protocols should carry consent metadata as a first-class element.
- Regulatory updates may need to define 'consent lineage' records similar to data lineage requirements in existing privacy law.
Load-bearing premise
Human consent can be broken into discrete, trackable attributes of specificity, validity, and scope that retain their meaning and can be monitored without loss when passed between robots.
What would settle it
A hospital trial in which one care robot receives limited patient consent for a procedure and delegates a sub-task to a second robot, then records whether the second robot's actions stay within or exceed the original consent boundaries.
Figures
read the original abstract
Robotic systems are moving from isolated platforms to interconnected multi-agent ecosystems that operate in human environments. This shift raises a governance problem that existing frameworks do not address: how does consent propagate, degrade, and break down across chains of delegation between embodied autonomous agents? The AI ethics community has begun to study consent for digital software agents, and the HRI community has examined consent in dyadic human-robot encounters. Neither body of work covers what happens when physical robots delegate tasks to other robots in ways that affect humans. This paper introduces consent chain degradation (CCD), a conceptual framework for analyzing how the specificity, validity, and scope of human consent erodes as authority passes through multi-robot delegation chains. We propose a three-layer governance architecture, the Consent Runtime Verification Framework for Embodied Agents (CoRVE), which integrates consent scope modeling, delegation chain tracking, and physical irreversibility assessment. Three scenarios in healthcare, domestic, and industrial robotics show how CCD arises in practice, including a worked numerical example. A regulatory gap analysis covering the EU AI Act, the GDPR, the Machinery Regulation, and the Revised Product Liability Directive shows that all four instruments leave core CCD dimensions unaddressed.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Consent Chain Degradation (CCD), a conceptual framework for analyzing how the specificity, validity, and scope of human consent erode as authority passes through multi-robot delegation chains in embodied multi-agent systems. It proposes the three-layer Consent Runtime Verification Framework for Embodied Agents (CoRVE) integrating consent scope modeling, delegation chain tracking, and physical irreversibility assessment. The work presents three illustrative scenarios (healthcare, domestic, industrial robotics) including a worked numerical example, and conducts a regulatory gap analysis of the EU AI Act, GDPR, Machinery Regulation, and Revised Product Liability Directive, concluding that these instruments leave core CCD dimensions unaddressed.
Significance. If operationalized with formal semantics and measurable degradation functions, the CCD framework and CoRVE architecture could usefully bridge gaps between AI agent governance and robot ethics by identifying consent erosion risks specific to physical delegation chains. The regulatory analysis usefully flags potential blind spots in existing instruments, though the conceptual approach currently limits falsifiable predictions or direct design implications.
major comments (3)
- [Introduction / CCD definition] The definition of CCD (Introduction and abstract) is circular: CCD is introduced as the erosion of specificity, validity, and scope, yet these attributes are presupposed to be discrete and trackable without providing independent formal semantics, predicate logic, state-machine models, or a measurable degradation function. This makes it impossible to distinguish claimed degradation from ordinary interpretive ambiguity.
- [CoRVE framework description] The CoRVE layers (proposed in the governance architecture section) inherit the same issue: consent scope modeling and delegation chain tracking are described informally without operationalization, so the framework restates premises rather than deriving testable predictions from benchmarks or verification procedures.
- [Regulatory gap analysis] The regulatory gap analysis asserts that the four instruments leave CCD dimensions unaddressed, but supplies no detailed textual evidence or mapping from specific articles/sections of the EU AI Act, GDPR, etc., to the claimed gaps; the conclusion therefore rests on the same unoperationalized attributes.
minor comments (3)
- [Numerical example] The numerical example in the scenarios section would benefit from explicit formulas or pseudocode showing how specificity/validity/scope values are computed and degraded across delegation steps.
- [CoRVE description] Clarify whether CoRVE is intended as a runtime monitoring system, a design guideline, or both; the current description mixes verification language with high-level architecture without distinguishing implementation requirements.
- [Related work / introduction] Add citations to prior HRI consent work and AI governance literature on delegation to better situate the novelty claim.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which identify opportunities to enhance the precision of our conceptual framework. We respond to each major comment below and note the revisions we will incorporate.
read point-by-point responses
-
Referee: [Introduction / CCD definition] The definition of CCD (Introduction and abstract) is circular: CCD is introduced as the erosion of specificity, validity, and scope, yet these attributes are presupposed to be discrete and trackable without providing independent formal semantics, predicate logic, state-machine models, or a measurable degradation function. This makes it impossible to distinguish claimed degradation from ordinary interpretive ambiguity.
Authors: We accept that the initial phrasing risks appearing circular and will revise the introduction and abstract to supply independent characterizations of specificity, validity, and scope, drawing on established distinctions in consent theory from legal and ethical sources. These revisions will include explicit examples showing how delegation chains produce measurable shifts in these attributes that exceed ordinary ambiguity. As the manuscript presents CCD as a conceptual framework rather than a formal model, we do not claim predicate logic or quantitative degradation functions here; such formalization is noted as future work. revision: partial
-
Referee: [CoRVE framework description] The CoRVE layers (proposed in the governance architecture section) inherit the same issue: consent scope modeling and delegation chain tracking are described informally without operationalization, so the framework restates premises rather than deriving testable predictions from benchmarks or verification procedures.
Authors: We agree the CoRVE description would benefit from greater specificity. In revision we will augment the governance architecture section with more detailed accounts of attribute-based scope modeling and chain-tracking mechanisms, including pseudocode outlines and expanded scenario walkthroughs that illustrate verification steps. These additions will clarify potential implementation paths while preserving the paper's focus on conceptual bridging rather than empirical benchmarks. revision: yes
-
Referee: [Regulatory gap analysis] The regulatory gap analysis asserts that the four instruments leave CCD dimensions unaddressed, but supplies no detailed textual evidence or mapping from specific articles/sections of the EU AI Act, GDPR, etc., to the claimed gaps; the conclusion therefore rests on the same unoperationalized attributes.
Authors: We welcome this suggestion and will revise the regulatory gap analysis to include direct citations and mappings from specific articles, recitals, and provisions in the EU AI Act, GDPR, Machinery Regulation, and Revised Product Liability Directive onto the CCD dimensions. These mappings will supply the requested textual evidence and strengthen the gap identification. revision: yes
- Supplying full formal semantics, predicate logic, state-machine models, or a measurable degradation function for CCD, which lies outside the intended conceptual scope of the current manuscript and is designated for subsequent technical development.
Circularity Check
CCD framework is defined directly in terms of the consent attributes (specificity, validity, scope) whose degradation it is introduced to analyze.
specific steps
-
self definitional
[Abstract]
"This paper introduces consent chain degradation (CCD), a conceptual framework for analyzing how the specificity, validity, and scope of human consent erodes as authority passes through multi-robot delegation chains."
CCD is introduced as the framework whose purpose is to analyze erosion of specificity, validity, and scope; these same attributes are used to constitute the definition of CCD itself. The subsequent CoRVE layers (consent scope modeling, delegation chain tracking) inherit the identical attributes, so the 'analysis' reduces to restating the definitional premises rather than deriving degradation from independent principles or data.
full rationale
The paper's core contribution is the introduction of a conceptual framework rather than a formal derivation with equations or falsifiable predictions. The definition of CCD and the CoRVE layers both rest on the premise that consent possesses discrete, monitorable attributes that survive delegation. This creates a self-referential structure where the claimed analysis largely follows from the initial definitional setup. No independent benchmarks, formal semantics, or external derivations are quoted to break the loop. The numerical example and scenarios illustrate the same attributes without adding new content that could falsify the framework.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Consent possesses measurable attributes of specificity, validity, and scope that can degrade across delegation steps
invented entities (2)
-
Consent Chain Degradation (CCD)
no independent evidence
-
Consent Runtime Verification Framework for Embodied Agents (CoRVE)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
International Federation of Robotics,World Robotics 2024: Industrial Robots. Frankfurt: IFR, 2024
work page 2024
-
[2]
T. L. Beauchamp and J. F. Childress,Principles of Biomedical Ethics, 8th ed. Oxford University Press, 2019
work page 2019
-
[3]
European Union, “Regulation (EU) 2016/679 on the protection of nat- ural persons with regard to the processing of personal data (GDPR),” Official J. EU, L 119, pp. 1–88, 2016
work page 2016
-
[4]
When exceptions are the norm: Exploring the role of consent in HRI,
T. Arnold and M. Scheutz, “When exceptions are the norm: Exploring the role of consent in HRI,”ACM Trans. Human-Robot Interact., vol. 8, no. 3, Art. 14, 2019
work page 2019
-
[5]
A critical analysis of consent in human–robot interaction,
M. N. Lintvedt, “A critical analysis of consent in human–robot interaction,” inThe Cambridge Handbook of the Law, Policy, and Regulation for Human–Robot Interaction, W. Barfield, Y .-H. Weng, and U. Pagallo, Eds. Cambridge, U.K.: Cambridge Univ. Press, 2024, ch. 17
work page 2024
-
[6]
RoCo: Dialectic multi-robot collab- oration with large language models,
Z. Mandi, S. Jain, and S. Song, “RoCo: Dialectic multi-robot collab- oration with large language models,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2024, pp. 286–299
work page 2024
-
[7]
Authenticated delegation and authorized ai agents,
S. Shavitet al., “Authenticated delegation and authorized AI agents,” arXiv preprint arXiv:2501.09674, 2025
-
[8]
A multi-robot architectural framework for effective robot teammates in mixed-initiative teams,
M. Scheutz, B. Oosterveld, J. Peterson, E. Wyss, and E. Krause, “A multi-robot architectural framework for effective robot teammates in mixed-initiative teams,” inProc. Int. Symp. Technol. Advances in Human-Robot Interact. (TAHRI), 2024, pp. 74–82
work page 2024
-
[9]
L. ¨Ostlund, M. Ernsth Bravell, and L. Johansson, “Working in a gray area: Healthcare staff experiences of receiving consent when caring for persons with dementia,”Dementia, vol. 22, no. 1, pp. 144–160, 2023
work page 2023
-
[10]
Developing a dementia friendly approach to consent in dementia research,
M. Pyer and A. Ward, “Developing a dementia friendly approach to consent in dementia research,”Aging & Mental Health, vol. 28, no. 2, pp. 294–301, 2024
work page 2024
-
[11]
The ethical issues of social assistive robotics: A critical literature review,
J. P. Boada, B. R. Maestre, and C. T. Gen ´ıs, “The ethical issues of social assistive robotics: A critical literature review,”Technol. in Soc., vol. 67, p. 101726, 2021
work page 2021
-
[12]
An ethical framework for human-robot collabo- ration for the future people-centric manufacturing,
C. Dignumet al., “An ethical framework for human-robot collabo- ration for the future people-centric manufacturing,”Technol. in Soc., vol. 98, p. 102288, 2024
work page 2024
-
[13]
Concerns and values in human-robot interactions: A focus on social robotics,
L. Sionet al., “Concerns and values in human-robot interactions: A focus on social robotics,”arXiv preprint arXiv:2501.05628, 2025
-
[14]
The Ubuntu robot: Towards a relational conceptual framework for intercultural robotics,
M. Coeckelbergh, “The Ubuntu robot: Towards a relational conceptual framework for intercultural robotics,” inThe Cambridge Handbook of the Law, Policy, and Regulation for Human–Robot Interaction, W. Barfield, Y .-H. Weng, and U. Pagallo, Eds. Cambridge, U.K.: Cambridge Univ. Press, 2024, pp. 408–420
work page 2024
-
[15]
The responsibility gap: Ascribing responsibility for the actions of learning automata,
A. Matthias, “The responsibility gap: Ascribing responsibility for the actions of learning automata,”Ethics Inf. Technol., vol. 6, no. 3, pp. 175–183, 2004
work page 2004
-
[16]
R. Sparrow, “Killer robots,”J. Appl. Philosophy, vol. 24, no. 1, pp. 62– 77, 2007
work page 2007
-
[17]
Four responsibility gaps with artificial intelligence,
F. Santoni de Sio and G. Mecacci, “Four responsibility gaps with artificial intelligence,”Philosophy & Technol., vol. 34, pp. 1057–1084, 2021
work page 2021
-
[18]
Tragic choices and the virtue of techno-responsibility gaps,
J. Danaher, “Tragic choices and the virtue of techno-responsibility gaps,”Philosophy & Technol., vol. 35, Art. 26, 2022
work page 2022
-
[19]
Toward a framework for levels of robot autonomy in human-robot interaction,
J. M. Beer, A. D. Fisk, and W. A. Rogers, “Toward a framework for levels of robot autonomy in human-robot interaction,”J. Human-Robot Interact., vol. 3, no. 2, pp. 74–99, 2014
work page 2014
-
[20]
Levels of autonomy for AI agents,
K. Fenget al., “Levels of autonomy for AI agents,” Knight First Amendment Institute, Columbia University, 2025
work page 2025
-
[21]
F. Cantucci, M. Marini, and R. Falcone, “The role of robot compe- tence, autonomy, and personality on trust formation in human-robot interaction,”ACM Trans. Human-Robot Interact., vol. 15, no. 3, Art. no. 55, pp. 1–27, 2026
work page 2026
-
[22]
Collaborative autonomy: Human-robot interaction to the test of intelligent help,
R. Falcone, A. Sapienza, F. Cantucci, and M. Marini, “Collaborative autonomy: Human-robot interaction to the test of intelligent help,” Electronics, vol. 11, no. 19, p. 3065, 2022
work page 2022
-
[23]
Power in human-robot interaction,
Y . T.-Y . Hou, E. Cheon, and M. F. Jung, “Power in human-robot interaction,” inProc. ACM/IEEE Int. Conf. Human-Robot Interact. (HRI), 2024, pp. 269–282
work page 2024
-
[24]
Regulation (EU) 2024/1689 laying down har- monised rules on artificial intelligence (AI Act),
European Union, “Regulation (EU) 2024/1689 laying down har- monised rules on artificial intelligence (AI Act),”Official J. EU, L series, 2024
work page 2024
-
[25]
Regulation (EU) 2023/1230 on machinery prod- ucts,
European Union, “Regulation (EU) 2023/1230 on machinery prod- ucts,”Official J. EU, L 165, pp. 1–102, 2023
work page 2023
-
[26]
Smart robotics in the EU legal framework: The role of the Machinery Regulation,
T. Mahler, “Smart robotics in the EU legal framework: The role of the Machinery Regulation,”Oslo Law Review, vol. 11, no. 1, pp. 1–18, 2024
work page 2024
-
[27]
Directive (EU) 2024/2853 on liability for defective products,
European Union, “Directive (EU) 2024/2853 on liability for defective products,”Official J. EU, L series, 2024
work page 2024
-
[28]
The consent vacuum: Governing agent-to-agent interac- tion,
M. Haklidir, “The consent vacuum: Governing agent-to-agent interac- tion,” submitted for publication, 2026
work page 2026
-
[29]
Consent as a runtime safety constraint for LLM agents,
M. Haklidir, “Consent as a runtime safety constraint for LLM agents,” submitted for publication, 2026
work page 2026
-
[30]
Ethics of social robotics: Individual and societal concerns and opportunities,
C. Torras, “Ethics of social robotics: Individual and societal concerns and opportunities,”Annu. Rev. Control, Robot., Auton. Syst., vol. 7, pp. 1–18, 2024
work page 2024
-
[31]
Meaningful human control over autonomous systems: A philosophical account,
F. Santoni de Sio and J. van den Hoven, “Meaningful human control over autonomous systems: A philosophical account,”Frontiers in Robot. and AI, vol. 5, Art. 15, 2018
work page 2018
-
[32]
Robot Operating System 2: Design, architecture, and uses in the wild,
S. Macenski, T. Foote, B. Gerkey, C. Lalancette, and W. Woodall, “Robot Operating System 2: Design, architecture, and uses in the wild,”Science Robotics, vol. 7, no. 66, eabm6074, 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.