GPU-Accelerated Barrier-Rate Guided MPPI Control for Tractor-Trailer Systems
Pith reviewed 2026-05-18 23:46 UTC · model grok-4.3
The pith
BR-MPPI embeds control barrier constraints into path-integral sampling to guide tractor-trailers through cluttered spaces without collisions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
BR-MPPI embeds Control Barrier Function (CBF) constraints directly into the path-integral update. By steering the importance-sampling distribution toward collision-free, dynamically feasible trajectories, BR-MPPI enhances the exploration strength of MPPI and improves robustness of resulting trajectories. The method is evaluated in the high-fidelity CarMaker simulator on a 12 m tractor-trailer tasked with reverse and forward parking in a parking lot.
What carries the argument
Barrier-rate guided importance sampling within MPPI that incorporates CBF constraints to adjust the distribution of sampled trajectories toward collision-free ones.
If this is right
- Control inputs are computed at rates above 100 Hz on a single GPU even with eight obstacles.
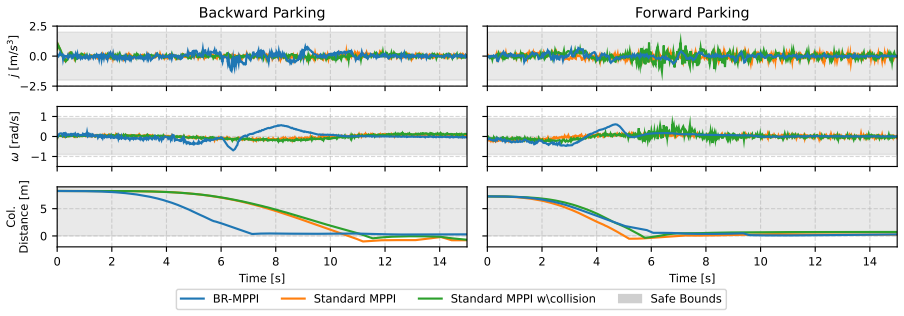
- BR-MPPI produces trajectories with better parking clearance than both standard MPPI and MPPI augmented with a collision cost.
- The controller supports both reverse and forward parking maneuvers for a 12 m tractor-trailer in lots containing pedestrians and other obstacles.
Where Pith is reading between the lines
- The same barrier-rate adjustment could be applied to MPPI on other underactuated or nonholonomic platforms that must maneuver in tight spaces.
- Onboard GPU implementations become feasible for production yard trucks and similar articulated vehicles once sim-to-real gaps are closed.
- The approach may reduce the need for hand-tuned cost functions by letting the CBF rate directly shape the sampling distribution.
Load-bearing premise
The high-fidelity CarMaker simulator provides sufficiently accurate dynamics and obstacle representations for the 12 m tractor-trailer such that performance gains observed in simulation will hold under real sensor noise and modeling error.
What would settle it
A physical tractor-trailer test that produces collisions or substantially worse clearance than in simulation when exposed to real sensor noise and modeling discrepancies would falsify the transfer of the reported gains.
Figures



read the original abstract
Articulated vehicles such as tractor-trailers, yard trucks, and similar platforms must often reverse and maneuver in cluttered spaces where pedestrians are present. We present how Barrier-Rate guided Model Predictive Path Integral (BR-MPPI) control can solve navigation in such challenging environments. BR-MPPI embeds Control Barrier Function (CBF) constraints directly into the path-integral update. By steering the importance-sampling distribution toward collision-free, dynamically feasible trajectories, BR-MPPI enhances the exploration strength of MPPI and improves robustness of resulting trajectories. The method is evaluated in the high-fidelity CarMaker simulator on a 12 [m] tractor-trailer tasked with reverse and forward parking in a parking lot. BR-MPPI computes control inputs in above 100 [Hz] on a single GPU (for scenarios with eight obstacles) and maintains better parking clearance than a standard MPPI baseline and an MPPI with collision cost baseline.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Barrier-Rate guided Model Predictive Path Integral (BR-MPPI) control for tractor-trailer systems. It embeds Control Barrier Function (CBF) constraints directly into the path-integral update to steer the importance-sampling distribution toward collision-free, dynamically feasible trajectories. The method is evaluated in the high-fidelity CarMaker simulator on a 12 m tractor-trailer for reverse and forward parking tasks, claiming real-time computation above 100 Hz on a single GPU (for scenarios with eight obstacles) and better parking clearance than a standard MPPI baseline and an MPPI with collision cost baseline.
Significance. If the central claims hold under rigorous validation, the approach could advance real-time safe navigation for articulated vehicles by enhancing MPPI exploration via barrier-rate guidance, offering a practical GPU-accelerated alternative for cluttered environments with pedestrians.
major comments (2)
- [Method section / CBF formulation] The central claim requires that embedding the barrier-rate into the MPPI importance-sampling distribution reliably steers trajectories toward collision-free paths for the full 12 m system. Tractor-trailer kinematics couple trailer pose to the history of tractor steering and velocity; a barrier function defined only on tractor position/velocity (or instantaneous distance to obstacles) does not automatically enforce clearance for the trailer. If the paper's CBF is h(x) = min distance(tractor, obs) - margin without an additional term derived from the kinematic trailer model (e.g., via predicted trailer position or a joint state barrier), the path-integral weighting can still assign high probability to samples that clear the tractor but clip the trailer, undermining the claimed robustness gain over the collision-cost baseline. Please provide the exact CBF definition and trailer constraint in
- [Abstract and Evaluation section] Abstract reports qualitative improvement in parking clearance and real-time rates but provides no equations, quantitative metrics, ablation studies, or error analysis to verify the central performance claims. Specific numbers (e.g., mean clearance distance, collision rates, success rates across trials) and details on barrier-rate scaling factors are needed to substantiate the superiority over baselines.
minor comments (2)
- [Experiments] Clarify the exact hardware configuration and number of samples used to achieve the >100 Hz rate for reproducibility.
- [Notation] Ensure all symbols (e.g., state vector x, control u, barrier function h) are defined consistently in the notation section.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment point by point below. Where the comments identify areas needing clarification or additional detail, we have revised the manuscript accordingly.
read point-by-point responses
-
Referee: [Method section / CBF formulation] The central claim requires that embedding the barrier-rate into the MPPI importance-sampling distribution reliably steers trajectories toward collision-free paths for the full 12 m system. Tractor-trailer kinematics couple trailer pose to the history of tractor steering and velocity; a barrier function defined only on tractor position/velocity (or instantaneous distance to obstacles) does not automatically enforce clearance for the trailer. If the paper's CBF is h(x) = min distance(tractor, obs) - margin without an additional term derived from the kinematic trailer model (e.g., via predicted trailer position or a joint state barrier), the path-integral weighting can still assign high probability to samples that clear the tractor but clip the trailer, undermining the claimed robustness gain over the collision-cost baseline. Please provide the exact CBF h
Authors: We thank the referee for this precise observation on the CBF formulation. The manuscript defines the CBF on the full joint state of the tractor-trailer system, with h(x) incorporating both tractor and predicted trailer positions via the kinematic bicycle model for the trailer. The barrier-rate term is computed from this joint h(x) to penalize samples that would violate trailer clearance. We acknowledge that the original submission did not present the exact expression and trailer term with sufficient clarity. The revised Method section now includes the precise definition of h(x), the kinematic prediction step for the trailer, and how the barrier rate is embedded in the path-integral weights. revision: yes
-
Referee: [Abstract and Evaluation section] Abstract reports qualitative improvement in parking clearance and real-time rates but provides no equations, quantitative metrics, ablation studies, or error analysis to verify the central performance claims. Specific numbers (e.g., mean clearance distance, collision rates, success rates across trials) and details on barrier-rate scaling factors are needed to substantiate the superiority over baselines.
Authors: We agree that the abstract and evaluation would be strengthened by quantitative metrics and additional analysis. The revised manuscript updates the abstract with key numerical results and expands the Evaluation section to report mean clearance distances, collision rates, success rates over repeated trials, and an ablation on the barrier-rate scaling factor. Statistical error bars and direct comparison tables versus the two baselines are now included. These additions provide the verifiable evidence requested while preserving the original experimental setup in CarMaker. revision: yes
Circularity Check
No significant circularity; derivation builds on external MPPI and CBF literature
full rationale
The paper describes BR-MPPI as an integration of Control Barrier Functions directly into the path-integral importance sampling update of MPPI to steer toward collision-free trajectories. No equations or steps in the provided abstract or description reduce a claimed prediction or result to a quantity defined by the authors' own fitted parameters or prior self-citations. The central premise draws from established prior work on MPPI and CBF without invoking a uniqueness theorem or ansatz from the same authors as load-bearing justification. Evaluation in the external CarMaker simulator supplies independent validation rather than internal self-consistency. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- barrier rate scaling factors
axioms (1)
- domain assumption Vehicle dynamics model used inside MPPI rollouts is sufficiently accurate for the 12 m tractor-trailer in the target parking scenarios.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
BR-MPPI embeds Control Barrier Function (CBF) constraints directly into the path-integral update... projects sampled control inputs during rollouts onto a safe set defined by control barrier function (CBF) constraints
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
ho(x) = (px′o/(mx+r))e + (py′o/(my+r))e − 1 ... super-ellipsoidal Barrier Formulation
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Neural Distance-Guided Path Integral Control for Tractor-Trailer Navigation
A geometric neural encoder supplies fast distance estimates from LiDAR to an MPPI controller, enabling map-free collision avoidance for articulated tractor-trailer vehicles in simulation.
Reference graph
Works this paper leans on
-
[1]
H. Parwana, T. Kim, K. Long, B. Hoxha, H. Okamoto, G. Fainekos, and D. Panagou, “Br-mppi: Barrier rate guided mppi for enforcing multiple inequality constraints with learned signed distance field,” arXiv preprint arXiv:2506.07325 , 2025. Fig. 4: Control inputs and obstacle clearance signals during parking maneuvers. The plots show the control input signal...
-
[2]
Information-theoretic model predictive control: Theory and applica- tions to autonomous driving,
G. Williams, P. Drews, B. Goldfain, J. M. Rehg, and E. A. Theodorou, “Information-theoretic model predictive control: Theory and applica- tions to autonomous driving,” IEEE Transactions on Robotics , vol. 34, no. 6, pp. 1603–1622, 2018
work page 2018
-
[3]
Control barrier function based quadratic programs for safety critical systems,
A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs for safety critical systems,” IEEE Transactions on Automatic Control , vol. 62, no. 8, pp. 3861–3876, 2016
work page 2016
-
[4]
Model predictive contouring control,
D. Lam, C. Manzie, and M. Good, “Model predictive contouring control,” in 49th IEEE Conference on Decision and Control (CDC) . IEEE, 2010, pp. 6137–6142
work page 2010
-
[5]
G. Vallinder, J. Martensson, P. F. Lima, and S. Bhat, “Model predictive control for autonomous driving: Comparing kinematic and dynamic models of tractor-trailer systems,” in IEEE 27th International Confer- ence on Intelligent Transportation Systems (ITSC) , 2024, pp. 3154– 3159
work page 2024
-
[6]
Optimization-based au- tonomous racing of 1: 43 scale rc cars,
A. Liniger, A. Domahidi, and M. Morari, “Optimization-based au- tonomous racing of 1: 43 scale rc cars,” Optimal Control Applications and Methods , vol. 36, no. 5, pp. 628–647, 2015
work page 2015
-
[7]
Neural configuration distance function for continuum robot control,
K. Long, H. Parwana, G. Fainekos, B. Hoxha, H. Okamoto, and N. Atanasov, “Neural configuration distance function for continuum robot control,” arXiv:2409.13865, Tech. Rep., 2024
-
[8]
P. Rabiee and J. B. Hoagg, “Guaranteed-safe mppi through composite control barrier functions for efficient sampling in multi-constrained robotic systems,” arXiv:2410.02154, Tech. Rep., 2024
-
[9]
J. Yin, C. Dawson, C. Fan, and P. Tsiotras, “Shield model predictive path integral: A computationally efficient robust mpc method using control barrier functions,” IEEE Robotics and Automation Letters , vol. 8, no. 11, pp. 7106–7113, 2023
work page 2023
-
[10]
Control barrier function augmentation in sampling-based control algorithm for sample efficiency,
C. Tao, H. Kim, H. Yoon, N. Hovakimyan, and P. V oulgaris, “Control barrier function augmentation in sampling-based control algorithm for sample efficiency,” in American Control Conference (ACC) , 2022, pp. 3488–3493
work page 2022
-
[11]
MPPI-DBaS: Safe trajectory op- timization with adaptive exploration,
F. Wang, Y . Cheng, and C. Tao, “MPPI-DBaS: Safe trajectory op- timization with adaptive exploration,” arXiv:2502.14387, Tech. Rep., 2025
-
[12]
J. Borquez, L. Raus, Y . U. Ciftci, and S. Bansal, “DualGuard MPPI: Safe and performant optimal control by combining sampling-based mpc and hamilton-jacobi reachability,” arXiv:2502.01924, Tech. Rep., 2025
-
[13]
Y . Liu, M. Yue, X. Zhao, and G. Zong, “Adaptive robust path tracking preview control for tractor-trailer trucks considering trailer sway and stochastic disturbances,” IEEE Transactions on Intelligent Transportation Systems, vol. 26, no. 4, pp. 5422–5434, 2025
work page 2025
-
[14]
Motion planning using physics-informed lstms for autonomous driving,
M. Selim, S. Bhat, and K. H. Johansson, “Motion planning using physics-informed lstms for autonomous driving,” in IEEE 27th In- ternational Conference on Intelligent Transportation Systems (ITSC) , 2024, pp. 2251–2258
work page 2024
-
[15]
Deep reinforcement learning based tractor-trailer tracking control,
Q. Kang, A. Hartmannsgruber, S.-H. Tan, X. Zhang, and C.-M. Chew, “Deep reinforcement learning based tractor-trailer tracking control,” in 2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC) , 2024, pp. 3147–3153
work page 2024
-
[16]
The truck backer-upper: an example of self-learning in neural networks,
D. Nguyen and B. Widrow, “The truck backer-upper: an example of self-learning in neural networks,” in International Joint Conference on Neural Networks , 1989, pp. 357–363 vol.2
work page 1989
-
[17]
Hybrid control of a truck and trailer vehicle,
C. Altafini, A. Speranzon, and K. H. Johansson, “Hybrid control of a truck and trailer vehicle,” in Hybrid Systems: Computation and Control. Springer, 2002, pp. 21–34
work page 2002
-
[18]
M. Hejase, J. Jing, J. M. Maroli, Y . Bin Salamah, L. Fiorentini, and U. Ozguner, “Constrained backward path tracking control using a plug-in jackknife prevention system for autonomous tractor-trailers,” in 21st International Conference on Intelligent Transportation Systems (ITSC), 2018, pp. 2012–2017
work page 2018
-
[19]
Motion planning and model predictive control for automated tractor-trailer hitching maneuver,
Z. Wang, A. Ahmad, R. Quirynen, Y . Wang, A. Bhagat, E. Zeino, Y . Zushi, and S. Di Cairano, “Motion planning and model predictive control for automated tractor-trailer hitching maneuver,” in IEEE Conference on Control Technology and Applications (CCTA) , 2022, pp. 676–682
work page 2022
-
[20]
Efficient safety-critical trajectory planning for any n-trailer system with ageneral model,
L. Gao, B. Jia, D. Li, Y . Yang, and S. Xie, “Efficient safety-critical trajectory planning for any n-trailer system with ageneral model,” Control Engineering Practice , no. 158
-
[21]
Improved a- search guided tree for autonomous trailer planning,
J. Leu, Y . Wang, M. Tomizuka, and S. D. Cairano, “Improved a- search guided tree for autonomous trailer planning,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2022
work page 2022
-
[22]
Improved task and motion planning for rearrangement problems using optimal control*,
A. Hellander, K. Bergman, and D. Axehill, “Improved task and motion planning for rearrangement problems using optimal control*,” in IEEE Intelligent V ehicles Symposium (IV) , 2024, pp. 2033–2040
work page 2024
-
[23]
Real- time optimization-based path planning for autonomous semi-trailer trucks*,
P. Ma, L. Sun, S. Wei, D. Wan, F. Ding, D. Zhang, and S. Tian, “Real- time optimization-based path planning for autonomous semi-trailer trucks*,” in 2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC) , 2024, pp. 3133–3140
work page 2024
-
[24]
Apten- planner: Autonomous parking of semi-trailer train in extremely nar- row environments,
M. Zhao, T. Shen, F. Wang, G. Yin, Z. Li, and Y . Zhang, “Apten- planner: Autonomous parking of semi-trailer train in extremely nar- row environments,” IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 5, pp. 4116–4132, 2024
work page 2024
-
[25]
J. Zeng, B. Zhang, Z. Li, and K. Sreenath, “Safety-critical control using optimal-decay control barrier function with guaranteed point- wise feasibility,” in2021 American Control Conference (ACC). IEEE, 2021, pp. 3856–3863
work page 2021
-
[26]
Safe perception-based control under stochastic sensor uncertainty using conformal prediction,
S. Yang, G. J. Pappas, R. Mangharam, and L. Lindemann, “Safe perception-based control under stochastic sensor uncertainty using conformal prediction,” in 62nd IEEE Conference on Decision and Control (CDC), 2023, pp. 6072–6078
work page 2023
-
[27]
Psy-taliro: A python toolbox for search-based test generation for cyber-physical systems,
Q. Thibeault, J. Anderson, A. Chandratre, G. Pedrielli, and G. Fainekos, “Psy-taliro: A python toolbox for search-based test generation for cyber-physical systems,” 2021. [Online]. Available: https://arxiv.org/abs/2106.02200
-
[28]
Mpcc++: Model predictive contouring control for time-optimal flight with safety con- straints,
D. Kulic, G. Venture, K. Bekris, and E. Coronado, “Mpcc++: Model predictive contouring control for time-optimal flight with safety con- straints,” in Robotics: Science and Systems Conference (RSS 2024) , 2024
work page 2024
-
[29]
A. Sakai, “Hybrid a* for trailer truck,” https://github.com/yinflight/ HybridAStarTrailer, 2022, accessed: 2025-05-01
work page 2022
-
[30]
JAX: composable transformations of Python+NumPy programs,
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman- Milne, and Q. Zhang, “JAX: composable transformations of Python+NumPy programs,” 2018. [Online]. Available: http://github. com/jax-ml/jax
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.