Stability of data-driven Koopman MPC with terminal conditions
Pith reviewed 2026-05-17 05:14 UTC · model grok-4.3
The pith
If a data-driven Koopman surrogate satisfies a proportional error bound, then MPC with terminal conditions asymptotically stabilizes the true nonlinear plant.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We prove recursive feasibility and asymptotic stability of the closed loop when a proportional error bound holds for the data-driven prediction model in an MPC scheme that includes terminal costs and constraints. For a broad class of nonlinear systems this proportional bound is satisfied by Koopman models identified through kernel extended dynamic mode decomposition from data.
What carries the argument
The proportional error bound on the difference between true and predicted dynamics, which is linear in the norms of state and input, combined with terminal conditions that keep the finite-horizon optimization feasible over time.
If this is right
- The MPC optimization problem stays feasible at every time step.
- The plant state converges asymptotically to the origin despite using an approximate model.
- The result applies directly to Koopman models identified from data via kEDMD for suitable nonlinear systems.
- A numerical case study confirms that the framework can be implemented on concrete plants.
Where Pith is reading between the lines
- This approach could reduce reliance on precise physical modeling when designing controllers for complex nonlinear plants.
- Similar proportional bounds might be derived for other data-driven surrogate methods such as neural-network predictors.
- The terminal-condition technique could be combined with constraint tightening to handle additional disturbances.
Load-bearing premise
The prediction error of the data-driven model must remain bounded by a constant times the combined norm of the state and input at each step.
What would settle it
A concrete nonlinear system where the kEDMD error is verified to be proportional yet closed-loop trajectories under the proposed MPC diverge or fail to reach the origin.
Figures
read the original abstract
This paper derives conditions under which Model Predictive Control (MPC) with terminal conditions, using a data-driven surrogate model as a prediction model, asymptotically stabilizes the plant despite approximation errors. In particular, we prove recursive feasibility and asymptotic stability if a proportional error bound holds, where proportional means that the bound is linear in the norm of the state and the input. For a broad class of nonlinear systems, this condition can be satisfied using data-driven surrogate models generated by kernel Extended Dynamic Mode Decomposition (kEDMD) using the Koopman operator. Last, the applicability of the proposed framework is demonstrated in a numerical case study.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript derives conditions for asymptotic stability of Model Predictive Control (MPC) with terminal conditions when the prediction model is a data-driven Koopman surrogate obtained via kernel Extended Dynamic Mode Decomposition (kEDMD). It proves recursive feasibility and asymptotic stability whenever the approximation error satisfies a proportional bound ||e(x,u)|| ≤ γ(||x|| + ||u||) with γ sufficiently small relative to the terminal set and cost. The paper asserts that this bound holds for a broad class of nonlinear systems when the surrogate is generated by kEDMD, and demonstrates the framework on a numerical case study.
Significance. If the proportional error bound is rigorously established for kEDMD surrogates, the result would supply a practical route to stability certificates for data-driven Koopman MPC that avoids the need for exact linearization or perfect models. The manuscript supplies explicit proofs of recursive feasibility and asymptotic stability under the stated error condition, together with a terminal-cost and terminal-set construction that is standard yet carefully adapted to the error setting. These elements constitute a clear technical contribution provided the kEDMD applicability claim is substantiated.
major comments (2)
- [§4] §4 (or the section asserting kEDMD applicability): the claim that finite-data kEDMD residuals satisfy ||e(x,u)|| ≤ γ(||x|| + ||u||) for a broad class of nonlinear systems is stated without an explicit derivation relating the operator approximation error, kernel choice, and sampling density to the linear scaling constant γ. The residual of a finite Gram-matrix projection generally contains a bias term that need not vanish linearly at the origin; a concrete bound or sufficient condition on data density and kernel parameters is required to make the second half of the central claim load-bearing rather than an assertion.
- [Theorem 1 and Theorem 2] Theorem 1 (recursive feasibility) and Theorem 2 (asymptotic stability): both results condition on the proportional error bound holding with γ small enough relative to the terminal set radius and the decrease rate of the terminal cost. Because the paper does not derive γ from the kEDMD construction, the stability guarantee remains conditional on an external hypothesis whose satisfaction is not verified within the manuscript.
minor comments (2)
- Notation for the error term e(x,u) should be introduced once and used consistently; currently the proportional bound is written with varying symbols across the stability section and the kEDMD discussion.
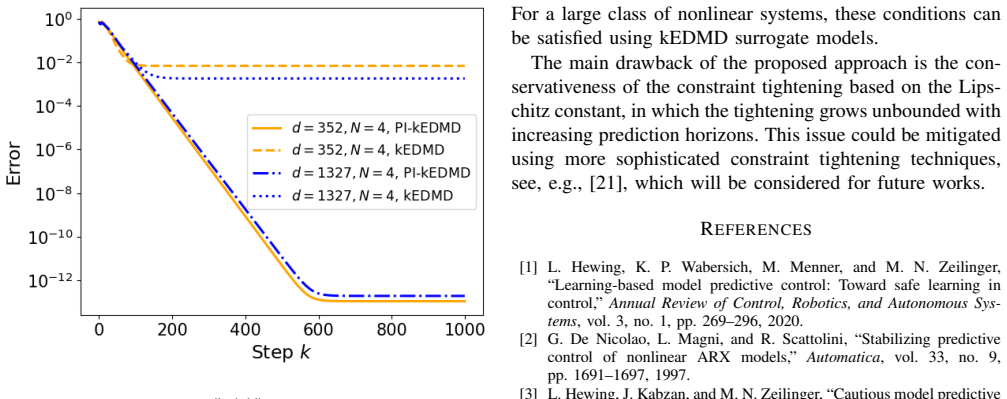
- The numerical case study would benefit from an explicit plot or table reporting the observed ||e(x,u)|| / (||x|| + ||u||) ratio over the state-input domain to illustrate that the proportional bound is attained in practice.
Simulated Author's Rebuttal
Thank you for the constructive referee report. We have carefully considered the major comments and provide point-by-point responses below. We plan to make revisions to address the concerns regarding the substantiation of the kEDMD error bound.
read point-by-point responses
-
Referee: [§4] §4 (or the section asserting kEDMD applicability): the claim that finite-data kEDMD residuals satisfy ||e(x,u)|| ≤ γ(||x|| + ||u||) for a broad class of nonlinear systems is stated without an explicit derivation relating the operator approximation error, kernel choice, and sampling density to the linear scaling constant γ. The residual of a finite Gram-matrix projection generally contains a bias term that need not vanish linearly at the origin; a concrete bound or sufficient condition on data density and kernel parameters is required to make the second half of the central claim load-bearing rather than an assertion.
Authors: We thank the referee for this observation. The manuscript states that the proportional error bound can be satisfied for a broad class of nonlinear systems via kEDMD, but does not provide a detailed derivation of the constant γ in terms of kernel and sampling parameters. We acknowledge that this leaves the applicability claim somewhat assertive. In the revised manuscript, we will expand §4 to include a derivation of sufficient conditions under which the kEDMD residual satisfies the proportional bound. This will involve assumptions on the reproducing kernel Hilbert space, the density of sampling points, and the smoothness of the underlying dynamics, showing that the bias term can be bounded linearly near the origin for systems where the Koopman operator has suitable spectral properties. We will also add a remark on the practical choice of kernel parameters to ensure γ is sufficiently small. revision: yes
-
Referee: [Theorem 1 and Theorem 2] Theorem 1 (recursive feasibility) and Theorem 2 (asymptotic stability): both results condition on the proportional error bound holding with γ small enough relative to the terminal set radius and the decrease rate of the terminal cost. Because the paper does not derive γ from the kEDMD construction, the stability guarantee remains conditional on an external hypothesis whose satisfaction is not verified within the manuscript.
Authors: We agree that Theorems 1 and 2 are conditional on the proportional error bound holding with γ small enough. This structure is intentional, as the primary contribution is the derivation of stability conditions for data-driven MPC under this error model. The link to kEDMD is made by asserting that the bound is achievable, which we will substantiate with the added analysis in §4 as described in our response to the first comment. In the revision, we will also update the abstract, introduction, and conclusion to emphasize that the stability guarantees are subject to the error bound being satisfied by the data-driven model, and that this is possible under the conditions we now derive for kEDMD. This will make the overall claim self-contained within the manuscript. revision: yes
Circularity Check
No circularity: stability result is conditional on external assumption
full rationale
The paper's core derivation proves recursive feasibility and asymptotic stability of the closed-loop MPC system whenever the data-driven model satisfies an external proportional error bound ||e(x,u)|| ≤ γ(||x|| + ||u||) with γ sufficiently small. This bound is introduced as a hypothesis rather than constructed from the MPC cost or terminal set, so the stability theorem does not reduce to a tautology. The subsequent statement that kEDMD Koopman models can realize such a bound for a broad class of nonlinear systems is an applicability claim supported by the properties of kernel EDMD; it does not feed back into the stability proof or rename a fitted residual as a derived prediction. No self-citation chain, ansatz smuggling, or uniqueness theorem imported from prior author work appears load-bearing for the main result. The derivation chain is therefore self-contained against the stated assumption.
Axiom & Free-Parameter Ledger
free parameters (1)
- proportional error bound scaling constant
axioms (2)
- domain assumption Standard MPC terminal cost and terminal set satisfy the usual decrease and invariance conditions for stability
- domain assumption The data-driven Koopman surrogate approximates the true nonlinear dynamics with an error linear in state and input norms
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we prove recursive feasibility and asymptotic stability if a proportional error bound holds, where proportional means that the bound is linear in the norm of the state and the input... using data-driven surrogate models generated by kernel Extended Dynamic Mode Decomposition (kEDMD)
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Assumption 1: ... ∥f(x,u)−fε(x,u)∥ ≤ min{cεx∥x∥+cεu∥u∥,ηε}
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Discounted MPC and infinite-horizon optimal control under plant-model mismatch: Stability and suboptimality
Exponential stability and suboptimality guarantees for discounted and undiscounted MPC under plant-model mismatch proportional to states and inputs, with uniform robustness over horizon length.
Reference graph
Works this paper leans on
-
[1]
Learning-based model predictive control: Toward safe learning in control,
L. Hewing, K. P. Wabersich, M. Menner, and M. N. Zeilinger, “Learning-based model predictive control: Toward safe learning in control,”Annual Review of Control, Robotics, and Autonomous Sys- tems, vol. 3, no. 1, pp. 269–296, 2020
work page 2020
-
[2]
Stabilizing predictive control of nonlinear ARX models,
G. De Nicolao, L. Magni, and R. Scattolini, “Stabilizing predictive control of nonlinear ARX models,”Automatica, vol. 33, no. 9, pp. 1691–1697, 1997
work page 1997
-
[3]
Cautious model predictive control using gaussian process regression,
L. Hewing, J. Kabzan, and M. N. Zeilinger, “Cautious model predictive control using gaussian process regression,”IEEE Transactions on Control Systems Technology, vol. 28, no. 6, pp. 2736–2743, 2019
work page 2019
-
[4]
Learning- based model predictive control for safe exploration,
T. Koller, F. Berkenkamp, M. Turchetta, and A. Krause, “Learning- based model predictive control for safe exploration,” in57th IEEE Conference on Decision and Control (CDC), pp. 6059–6066, 2018
work page 2018
-
[5]
A tutorial review of neural network modeling approaches for model predictive control,
Y . M. Ren, M. S. Alhajeri, J. Luo, S. Chen, F. Abdullah, Z. Wu, and P. D. Christofides, “A tutorial review of neural network modeling approaches for model predictive control,”Computers & Chemical Engineering, vol. 165, 107956, 2022
work page 2022
-
[6]
Recurrent neural network-based MPC for systems with input and incremental input constraints,
I. Schimperna, G. Galuppini, and L. Magni, “Recurrent neural network-based MPC for systems with input and incremental input constraints,”IEEE Control Systems Letters, vol. 8, pp. 814–819, 2024
work page 2024
-
[7]
A data–driven approximation of the Koopman operator: Extending dynamic mode decomposition,
M. O. Williams, I. G. Kevrekidis, and C. W. Rowley, “A data–driven approximation of the Koopman operator: Extending dynamic mode decomposition,”Journal of Nonlinear Science, vol. 25, pp. 1307–1346, 2015
work page 2015
-
[8]
An overview of Koopman-based control: From error bounds to closed-loop guarantees,
R. Str ¨asser, K. Worthmann, I. Mezi ´c, J. Berberich, M. Schaller, and F. Allg ¨ower, “An overview of Koopman-based control: From error bounds to closed-loop guarantees,”Annual Reviews in Control, vol. 61, 101035, 2026
work page 2026
-
[9]
Spectral properties of dynamical systems, model reduction and decompositions,
I. Mezi ´c, “Spectral properties of dynamical systems, model reduction and decompositions,”Nonlinear Dynamics, vol. 41, pp. 309–325, 2005
work page 2005
-
[10]
Spectral analysis of nonlinear flows,
C. W. Rowley, I. Mezi ´c, S. Bagheri, P. Schlatter, and D. S. Henningson, “Spectral analysis of nonlinear flows,”Journal of Fluid Mechanics, vol. 641, pp. 115–127, 2009
work page 2009
-
[11]
Linear predictors for nonlinear dynamical systems: Koopman operator meets model predictive control,
M. Korda and I. Mezi ´c, “Linear predictors for nonlinear dynamical systems: Koopman operator meets model predictive control,”Auto- matica, vol. 93, pp. 149–160, 2018
work page 2018
-
[12]
Koopman form of nonlinear systems with inputs,
L. C. Iacob, R. T ´oth, and M. Schoukens, “Koopman form of nonlinear systems with inputs,”Automatica, vol. 162, 111525, 2024
work page 2024
-
[13]
Finite- data error bounds for Koopman-based prediction and control,
F. N ¨uske, S. Peitz, F. Philipp, M. Schaller, and K. Worthmann, “Finite- data error bounds for Koopman-based prediction and control,”Journal of Nonlinear Science, vol. 33, 14, 2023
work page 2023
-
[14]
Towards reliable data-based optimal and predictive control using extended DMD,
M. Schaller, K. Worthmann, F. Philipp, S. Peitz, and F. N ¨uske, “Towards reliable data-based optimal and predictive control using extended DMD,”IFAC-PapersOnLine, vol. 56, no. 1, pp. 169–174, 2023
work page 2023
-
[15]
Kernel-based approximation of the Koopman generator and Schr ¨odinger operator,
S. Klus, F. N ¨uske, and B. Hamzi, “Kernel-based approximation of the Koopman generator and Schr ¨odinger operator,”Entropy, vol. 22, 722, no. 7, 2020
work page 2020
-
[16]
F. K ¨ohne, F. M. Philipp, M. Schaller, A. Schiela, and K. Worthmann, “L∞-error bounds for approximations of the Koopman operator by kernel extended dynamic mode decomposition,”SIAM Journal on Applied Dynamical Systems, vol. 24, no. 1, pp. 501–529, 2025
work page 2025
-
[17]
Kernel- based Koopman approximants for control: Flexible sampling, error analysis, and stability,
L. Bold, F. M. Philipp, M. Schaller, and K. Worthmann, “Kernel- based Koopman approximants for control: Flexible sampling, error analysis, and stability,”SIAM Journal on Control and Optimization,
- [18]
-
[19]
J. B. Rawlings, D. Q. Mayne, M. Diehl,et al.,Model Predictive Control: Theory, Computation, and Design. Nob Hill Publishing, 2017
work page 2017
-
[20]
B. Kouvaritakis and M. Cannon,Model predictive control. Springer, 2016
work page 2016
-
[21]
D. Lim ´on Marruedo, T. Alamo, and E. F. Camacho, “Input-to-state stable MPC for constrained discrete-time nonlinear systems with bounded additive uncertainties,” in41st IEEE Conference on Decision and Control (CDC), vol. 4, pp. 4619–4624, 2002
work page 2002
-
[22]
A novel constraint tightening approach for nonlinear robust model predictive control,
J. K ¨ohler, M. A. M ¨uller, and F. Allg ¨ower, “A novel constraint tightening approach for nonlinear robust model predictive control,” inIEEE Annual American Control Conference (ACC), pp. 728–734, 2018
work page 2018
-
[23]
Nominally robust model predictive control with state constraints,
G. Grimm, M. J. Messina, S. E. Tuna, and A. R. Teel, “Nominally robust model predictive control with state constraints,”IEEE Transac- tions on Automatic Control, vol. 52, no. 10, pp. 1856–1870, 2007
work page 2007
-
[24]
Offset-free MPC ex- plained: novelties, subtleties, and applications,
G. Pannocchia, M. Gabiccini, and A. Artoni, “Offset-free MPC ex- plained: novelties, subtleties, and applications,”IFAC-PapersOnLine, vol. 48, no. 23, pp. 342–351, 2015
work page 2015
-
[25]
Offset-free nonlinear MPC with Koopman-based surrogate models,
I. Schimperna, L. Bold, and K. Worthmann, “Offset-free nonlinear MPC with Koopman-based surrogate models,”IFAC-PapersOnLine,
- [26]
-
[27]
I. Schimperna, K. Worthmann, M. Schaller, L. Bold, and L. Magni, “Data-driven model predictive control: Asymptotic stability despite approximation errors exemplified in the Koopman framework,”arXiv preprint arXiv:2505.05951, 2025
-
[28]
Beyond inherent robustness: strong stability of MPC despite plant-model mismatch,
S. J. Kuntz and J. B. Rawlings, “Beyond inherent robustness: strong stability of MPC despite plant-model mismatch,”IEEE Transactions on Automatic Control, pp. 1–13, 2025
work page 2025
-
[29]
Data-driven MPC with terminal conditions in the Koopman frame- work,
K. Worthmann, R. Str ¨asser, M. Schaller, J. Berberich, and F. Allg¨ower, “Data-driven MPC with terminal conditions in the Koopman frame- work,” in63rd IEEE Conference on Decision and Control (CDC), pp. 146–151, 2024
work page 2024
-
[30]
Data-driven MPC with stability guarantees using extended dynamic mode decom- position,
L. Bold, L. Gr ¨une, M. Schaller, and K. Worthmann, “Data-driven MPC with stability guarantees using extended dynamic mode decom- position,”IEEE Transactions on Automatic Control, vol. 70, no. 1, pp. 534–541, 2025
work page 2025
-
[31]
Kernel EDMD for data-driven nonlinear Koopman MPC with stability guar- antees,
L. Bold, M. Schaller, I. Schimperna, and K. Worthmann, “Kernel EDMD for data-driven nonlinear Koopman MPC with stability guar- antees,”IFAC PapersOnLine, 2025. Accepted for publication, preprint arxiv:2501.08709
-
[32]
L. Gr ¨une and J. Pannek,Nonlinear model predictive control. Springer, 2017
work page 2017
-
[33]
Extensions of the path-integral formula for computation of Koopman eigenfunctions,
S. A. Deka and U. Vaidya, “Extensions of the path-integral formula for computation of Koopman eigenfunctions,” in63rd IEEE Conference on Decision and Control (CDC), pp. 2875–2881, 2024
work page 2024
-
[34]
When Koopman meets Hamilton and Jacobi,
U. Vaidya, “When Koopman meets Hamilton and Jacobi,”IEEE Transactions on Automatic Control, pp. 1–16, 2025
work page 2025
-
[35]
G. Fasshauer and Q. Ye, “Reproducing kernels of generalized Sobolev spaces via a Green function approach with distributional operators,” Numerische Mathematik, vol. 119, pp. 585–611, 2011
work page 2011
-
[36]
Approximate interpolation with appli- cations to selecting smoothing parameters,
H. Wendland and C. Rieger, “Approximate interpolation with appli- cations to selecting smoothing parameters,”Numerische Mathematik, vol. 101, pp. 729–748, 2005
work page 2005
-
[37]
On excitation of control-affine systems and its use for data-driven Koopman approximants,
P. Schmitz, L. Bold, F. M. Philipp, M. Rosenfelder, P. Eberhard, H. Ebel, and K. Worthmann, “On excitation of control-affine systems and its use for data-driven Koopman approximants,”arXiv preprint arXiv:2511.03734, 2025
work page internal anchor Pith review arXiv 2025
-
[38]
Bivariate polynomial interpolation on the square at new nodal sets,
M. Caliari, S. De Marchi, and M. Vianello, “Bivariate polynomial interpolation on the square at new nodal sets,”Applied Mathematics and Computation, vol. 165, no. 2, pp. 261–274, 2005
work page 2005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.