Recognition: 2 theorem links
· Lean TheoremProtoFlow: Mitigating Forgetting in Class-Incremental Remote Sensing Segmentation via Low-Curvature Prototype Flow
Pith reviewed 2026-05-13 20:34 UTC · model grok-4.3
The pith
ProtoFlow models class prototypes as low-curvature trajectories to reduce forgetting in continual remote sensing segmentation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
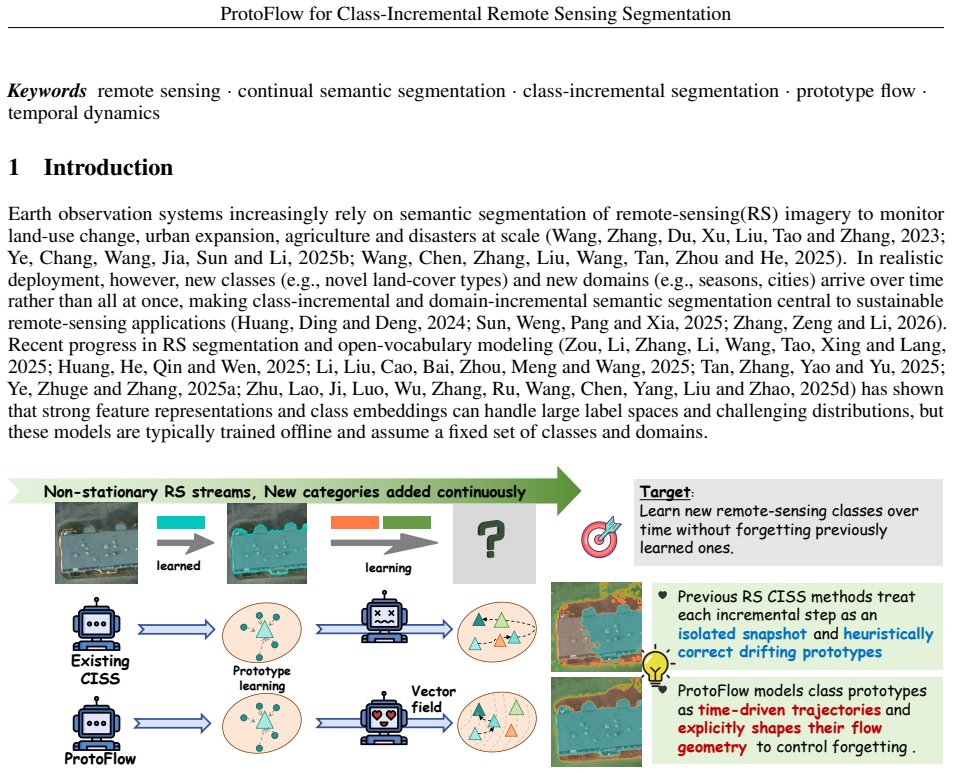
ProtoFlow represents class prototypes as trajectories governed by an explicit temporal vector field and jointly optimizes for low-curvature motion and inter-class separation, thereby stabilizing prototype geometry and mitigating catastrophic forgetting across incremental training steps in remote sensing segmentation.
What carries the argument
A time-aware prototype dynamics model that updates class prototypes along a learned temporal vector field subject to low-curvature and separation penalties.
If this is right
- Yields 1.5–2.0 point gains in mIoUall over prior incremental baselines on standard benchmarks.
- Reduces forgetting rates in both class-incremental and domain-incremental remote sensing settings.
- Produces an explicit, interpretable record of how each class prototype moves through training steps.
- Stabilizes overall representation geometry without expanding model capacity or storing past samples.
Where Pith is reading between the lines
- The trajectory view could be tested in other continual vision domains where semantic classes are represented by compact prototypes.
- Low-curvature regularization might lessen dependence on replay memory in broader continual-learning pipelines.
- Measuring actual prototype curvature on real deployment streams would directly test the central modeling assumption.
Load-bearing premise
Enforcing low-curvature motion and inter-class separation on prototype trajectories is sufficient to prevent representation drift and forgetting without replay buffers or architectural changes.
What would settle it
A controlled sequence of new remote-sensing images whose distribution forces prototypes onto high-curvature paths despite the penalty, after which forgetting on earlier classes measurably increases.
Figures










read the original abstract
Remote sensing segmentation in real deployment is inherently continual: new semantic categories emerge, and acquisition conditions shift across seasons, cities, and sensors. Despite recent progress, many incremental approaches still treat training steps as isolated updates, which leaves representation drift and forgetting insufficiently controlled. We present ProtoFlow, a time-aware prototype dynamics framework that models class prototypes as trajectories and learns their evolution with an explicit temporal vector field. By jointly enforcing low-curvature motion and inter-class separation, ProtoFlow stabilizes prototype geometry throughout incremental learning. Experiments on standard class- and domain-incremental remote sensing benchmarks show consistent gains over strong baselines, including up to 1.5-2.0 points improvement in mIoUall, together with reduced forgetting. These results suggest that explicitly modeling temporal prototype evolution is a practical and interpretable strategy for robust continual remote sensing segmentation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces ProtoFlow, a time-aware prototype dynamics framework for class-incremental remote sensing segmentation. Class prototypes are modeled as trajectories evolving under a learned temporal vector field; low-curvature motion and inter-class separation are jointly enforced to stabilize geometry and mitigate representation drift and forgetting. Experiments on standard class- and domain-incremental remote sensing benchmarks report consistent gains, including 1.5–2.0 mIoUall improvements and reduced forgetting over strong baselines.
Significance. If the central claims hold, the work offers an interpretable, prototype-centric alternative to replay buffers or architectural expansion for continual learning in remote sensing, where sequential data arrival from seasonal/sensor shifts is common. Explicit temporal modeling of prototype evolution could improve robustness in deployment settings and provide a practical strategy for controlling forgetting without additional memory mechanisms.
major comments (3)
- [Abstract] Abstract: the reported 1.5–2.0 mIoUall gains and reduced forgetting are stated without any description of the baselines, number of runs, statistical tests, data splits, or ablation studies, preventing verification of the quantitative claims.
- [Method] Method (temporal vector field and curvature penalty): the central assumption that low-curvature trajectories plus separation suffice to bound drift under domain shifts is load-bearing but untested; if optimal paths require higher curvature for new distributions, the regularization may cap gains, and no experiment isolates this risk.
- [Experiments] Experiments: no ablation isolates the curvature term from inter-class separation or prototype initialization; without this, it is impossible to attribute the reported improvements to the low-curvature flow as claimed.
minor comments (2)
- [Method] Notation for the temporal vector field and curvature computation should be defined more explicitly, including how the penalty is applied in prototype space.
- [Related Work] Related-work discussion should include recent continual-learning methods specific to remote-sensing segmentation for completeness.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and describe the revisions planned for the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the reported 1.5–2.0 mIoUall gains and reduced forgetting are stated without any description of the baselines, number of runs, statistical tests, data splits, or ablation studies, preventing verification of the quantitative claims.
Authors: We agree that the abstract should provide more context for the reported gains. In the revision we will expand the abstract to name the primary baselines (EWC, LwF, and recent prototype-based continual learning methods), state that results are averaged over five independent runs with standard deviations, reference the standard class- and domain-incremental splits on the ISPRS Vaihingen/Potsdam and related remote-sensing benchmarks, and note that full ablation studies appear in Section 4.3. Statistical significance via paired t-tests is reported in the supplementary material; we will add a concise mention if length permits. revision: yes
-
Referee: [Method] Method (temporal vector field and curvature penalty): the central assumption that low-curvature trajectories plus separation suffice to bound drift under domain shifts is load-bearing but untested; if optimal paths require higher curvature for new distributions, the regularization may cap gains, and no experiment isolates this risk.
Authors: We acknowledge that the assumption requires stronger isolation. While our domain-incremental experiments already demonstrate improved stability under sensor and seasonal shifts when the curvature penalty is active, we will add a controlled experiment in the revision that varies the curvature regularization weight across simulated distribution shifts, measures resulting prototype drift, and compares final mIoU against an unregularized (higher-curvature) counterpart. This will directly test whether the penalty caps adaptability. revision: yes
-
Referee: [Experiments] Experiments: no ablation isolates the curvature term from inter-class separation or prototype initialization; without this, it is impossible to attribute the reported improvements to the low-curvature flow as claimed.
Authors: This is a fair criticism. The existing ablations examine the temporal vector field and overall framework but do not fully disentangle the curvature penalty from the separation loss and initialization. In the revised manuscript we will insert a dedicated ablation table that (i) varies only the curvature coefficient while freezing separation and initialization, (ii) ablates separation while keeping curvature fixed, and (iii) compares different prototype initializations under the full objective. This will permit clearer attribution of gains to the low-curvature component. revision: yes
Circularity Check
No load-bearing circularity; modeling choice is independent of target metric
full rationale
The paper defines ProtoFlow via an explicit temporal vector field on prototypes plus curvature and separation penalties. This is an ansatz introduced as a design choice rather than derived from or defined in terms of the forgetting metric. No equations reduce the claimed gains to a fitted parameter renamed as prediction, nor does any uniqueness theorem or self-citation chain substitute for the central modeling step. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel (J-cost uniqueness) echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
We define a parametric vector field F_ϕ : R^d × R → R^d … bμ^{(k+1)}_c = μ^{(k)}_c + Δτ_k F_ϕ(μ^{(k)}_c, τ_k). … L_curve = Σ ||μ^{(t+1)}_c − 2μ^{(t)}_c + μ^{(t-1)}_c||_2^2
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
treat class prototypes as trajectories evolving in a time-indexed feature space … low-curvature motion and inter-class separation
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
EGAD: Entropy-Guided Adaptive Distillation for Token-Level Knowledge Transfer
EGAD adaptively distills LLM knowledge at the token level by using entropy to create a curriculum from low- to high-entropy tokens, adjust temperature, and switch between logits-only and feature-based branches.
Reference graph
Works this paper leans on
-
[1]
Large-scale machine learning with stochastic gradient descent, in: Proceedings of COMPSTAT’2010: 19th International Conference on Computational StatisticsParis France, August 22-27, 2010 Keynote, Invited and Contributed Papers, Springer. pp. 177–186. Cermelli, F., Cord, M., Douillard, A.,
work page 2010
-
[2]
Deepglobe 2018: A challenge to parse the earth through satellite images, in: Proceedings of the IEEE conference on computer vision and pattern recognition workshops, pp. 172–181. Fang, K., Zhang, A., Gao, G., Jiao, J., Liu, C.H., Wei, Y .,
work page 2018
-
[3]
URL: https://arxiv.org/abs/2507.12857
Score: Scene context matters in open-vocabulary remote sensing instance segmentation, in: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). URL: https://arxiv.org/abs/2507.12857. highlight. Huang, W., Ding, M., Deng, F.,
-
[4]
IEEE Transactions on Geoscience and Remote Sensing 62, 1–15
Domain-incremental learning for remote sensing semantic segmentation with multifeature constraints in graph space. IEEE Transactions on Geoscience and Remote Sensing 62, 1–15. doi:doi:10.1109/TGRS.2024.3481875. Li, K., Liu, R., Cao, X., Bai, X., Zhou, F., Meng, D., Wang, Z.,
-
[5]
arXiv preprint arXiv:2501.13925 URL:https://arxiv.org/abs/2501.13925
Geopixel: Pixel grounding large multimodal model in remote sensing. arXiv preprint arXiv:2501.13925 URL:https://arxiv.org/abs/2501.13925. Sun, X., Wang, P., Yan, Z., Diao, W., Lu, X., Yang, Z., Zhang, Y ., Xiang, D., Yan, C., Guo, J., et al.,
-
[6]
IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 14, 8922–8940
Automated high-resolution earth observation image interpretation: Outcome of the 2020 gaofen challenge. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 14, 8922–8940. Sun, X., Weng, X., Pang, C., Xia, G.S.,
work page 2020
-
[7]
Science China Information Sciences 68, 182301
Mitigating representation bias for class-incremental semantic segmentation of remote sensing images. Science China Information Sciences 68, 182301. doi:doi:10.1007/s11432-024-4307-1. Tan, J., Zhang, H., Yao, N., Yu, Q.,
-
[8]
Loveda: A remote sensing land-cover dataset for domain adaptive semantic segmentation. arXiv preprint arXiv:2110.08733 . Wang, T., Chen, G., Zhang, X., Liu, C., Wang, J., Tan, X., Zhou, W., He, C.,
-
[9]
Self-training and curriculum learning guided dynamic refined network for remote sensing class-incremental semantic segmentation, in: IGARSS 2024-2024 IEEE International Geoscience and Remote Sensing Symposium, IEEE. pp. 8334–8338. Zhao, H., Yang, F., Fu, X., Li, X.,
work page 2024
-
[10]
arXiv preprint arXiv:2503.06683 URL:https://arxiv.org/abs/2503.06683
Dynamic dictionary learning for remote sensing image segmentation. arXiv preprint arXiv:2503.06683 URL:https://arxiv.org/abs/2503.06683. Photo Jiekai Wu is currently a integrated master’s and PhD program at Juntendo University, specializing in Computer Vision and Medical Imaging. He conducts his research under the supervision of Professor Aoki Shigeki. Hi...
-
[11]
His research interests are focused on the application of artificial intelligence. Photo Chuangqi Li, a technology member with a Computer Science background and deep expertise bridging autonomous driving and AI-driven medical image analysis. Currently the CTO of Beijing Qichuang Era Technology Co., Ltd., driving the R&D and commercialization of innovative ...
work page 2021
-
[12]
He is currently working at the National Engineering Research Center for Beijing Biochip Technology (CapitalBio Corporation) focusing on intelligent diagnosis and medical image analysis. His research interests include medical image segmentation and detection, as well as multimodal learning. Photo Dongxu Zhang is currently a master’s student at Juntendo Uni...
work page 2017
-
[13]
Because of his efforts in Genetic Programming, he also ranked 19th in GP bibliography among more than 12 000 researchers. He has also served as an associate editor, an editor, and a guest editor in several prestigious journals and has delivered several keynote/invited talks Photo Simon James Fong received the B.Eng. (Hons.) and Ph.D. degrees in computer s...
work page 1993
-
[14]
with 7 semantic classes (urban, agriculture, rangeland, forest, water, barren, and unknown/background). Following standard practice, original tiles of size 2448×2448 are cut into non-overlapping patches of 512×512 pixels. We use the official training split for incremental training and the official validation split for evaluation. For class-incremental seg...
work page 2024
-
[15]
consists of 33 high-resolution tiles with near-infrared, red and green channels and pixel-wise labels for 6 classes (impervious surfaces, buildings, low vegetation, trees, cars, and clutter/background). We follow Huang et al. (2024); Zou et al. (2025); Sun et al. (2025) for pre-processing and train/validation splits: 16 images are used for training, 5 for...
work page 2024
-
[16]
(2024), where the base step contains 3 classes and each incremental step adds 1 new foreground class
We use the same 4-step class-incremental protocol as in Huang et al. (2024), where the base step contains 3 classes and each incremental step adds 1 new foreground class. ISPRS Potsdam.The ISPRS Potsdam dataset (Rottensteiner et al.,
work page 2024
-
[17]
We follow the common protocol in Zou et al
provides 38 tiles with RGB+IR channels and 6 semantic classes. We follow the common protocol in Zou et al. (2025); Huang et al. (2024): 24 images for training, 7 for validation, and 7 for testing. We crop patches of size 512×512 with stride
work page 2025
-
[18]
We adopt the semantic segmentation version used in Rong et al
is a large-scale aerial image benchmark with high-resolution images and dense annotations. We adopt the semantic segmentation version used in Rong et al. (2022); Zhao et al. (2024), which aggregates instance-level masks into semantic labels. We use the official training/validation split and crop images into 512×512 patches with stride
work page 2022
-
[19]
consists of large-scale aerial imagery with densely annotated semantic labels. We follow Rong et al. (2022); Zhao et al. (2024) for pre-processing and train/validation splits and adopt the same patch size (512×512 ) and stride (256). The incremental protocol again mirrors that of DeepGlobe and iSAID, with a 4-step schedule and the same relative class prop...
work page 2022
-
[20]
contains 5987 land-cover images annotated with 7 classes and split into urban and rural domains. To study domain-/temporal shift, we follow the domain-incremental protocol introduced in GSMF-RS-DIL (Huang et al., 2024): (i) step 0 trains on the urban subset, (ii) step 1 trains on the rural subset, and (iii) step 2 revisits a mixed domain containing both (...
work page 2024
-
[21]
predict a stronger statement:when we reduce curvature by regularizing prototype trajectories, we should also reduce forgetting, relative to a strong baseline. To test this prediction, we perform a class-level differential analysis comparing ProtoFlow with a competitive RS-CISS baseline (MiR (Sun et al., 2025)). For each dataset and each semantic classc, w...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.