InvariantCloud: A Globally Invariant, Uniquely Indexed Point Cloud Framework for Robust 6-DoF Tactile Pose Tracking
Pith reviewed 2026-06-29 23:36 UTC · model grok-4.3
The pith
InvariantCloud registers globally invariant marker point clouds in one shot to track 6-DoF tactile poses without drift or yaw ambiguity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
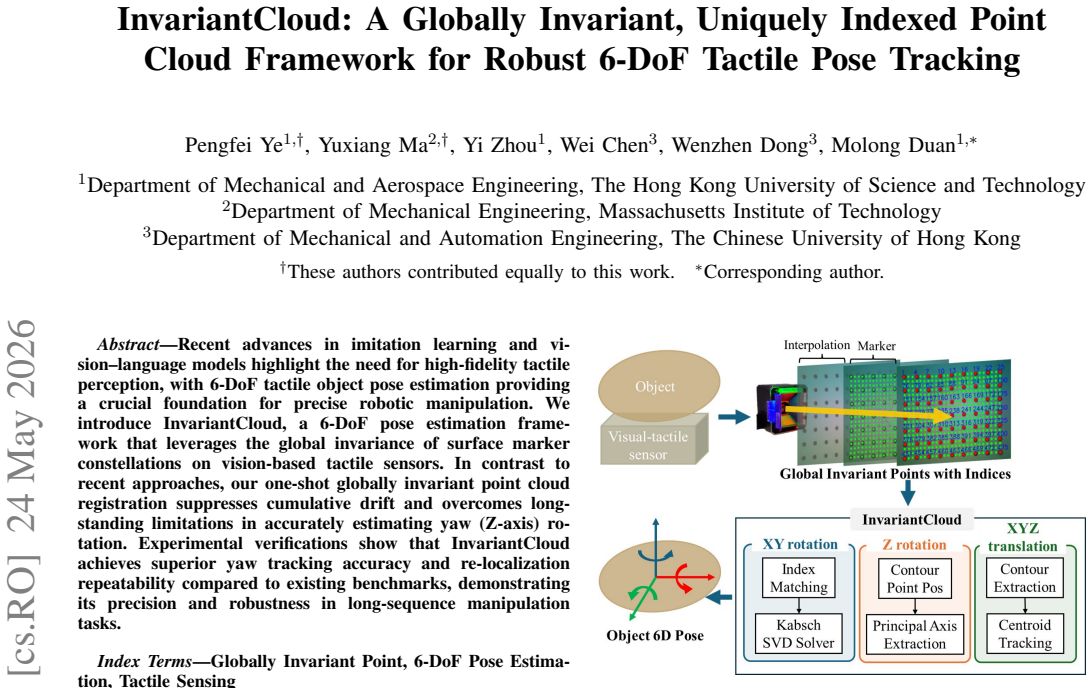
InvariantCloud constructs a globally invariant and uniquely indexed point cloud from the surface marker constellations of vision-based tactile sensors. One-shot registration of this point cloud to the object model suppresses cumulative drift and resolves yaw rotation ambiguity, yielding superior tracking accuracy and re-localization performance in long-sequence manipulation tasks compared to existing benchmarks.
What carries the argument
The globally invariant point cloud formed by surface marker constellations, which performs one-shot registration to produce drift-free 6-DoF estimates.
If this is right
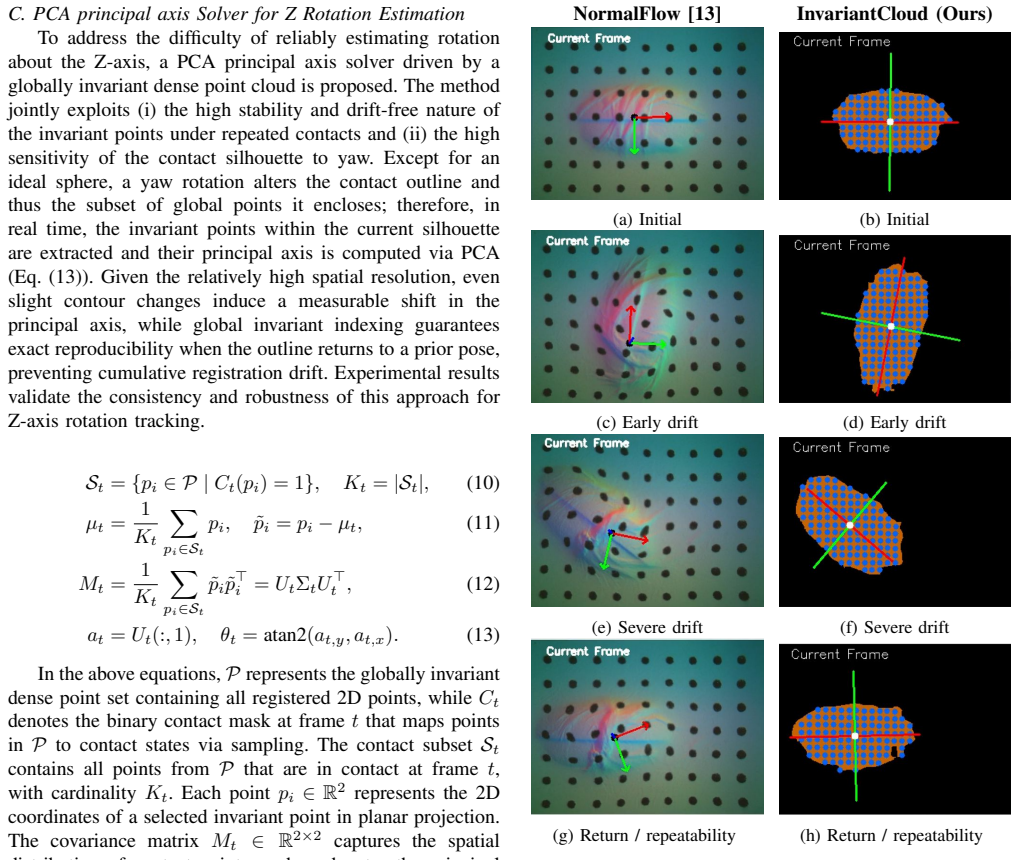
- Yaw tracking accuracy exceeds that of prior incremental methods.
- Re-localization after object contact becomes repeatable without accumulated error.
- Cumulative drift remains suppressed across extended manipulation sequences.
- The framework supports precise 6-DoF estimates needed for long-horizon robotic tasks.
Where Pith is reading between the lines
- The same marker-based invariance could anchor hybrid visual-tactile systems to reduce overall drift.
- If indexing remains unique across sensor instances, the approach might allow standardized calibration without per-device retraining.
- Contact-rich tasks lasting many minutes could maintain pose consistency where frame-to-frame methods degrade.
- Testing registration success rates on objects with varying curvature would clarify the limits of the invariance assumption.
Load-bearing premise
The surface marker constellations on the tactile sensor provide a globally invariant and uniquely indexed point cloud that enables reliable one-shot registration without drift or yaw ambiguity.
What would settle it
An experiment in which yaw error grows over time or re-localization repeatability drops to baseline levels on sequences with partial marker occlusion or longer duration than those tested would show the central claim does not hold.
Figures
read the original abstract
Recent advances in imitation learning and vision-language models highlight the need for high-fidelity tactile perception, with 6-DoF tactile object pose estimation providing a crucial foundation for precise robotic manipulation. We introduce InvariantCloud, a 6-DoF pose estimation framework that leverages the global invariance of surface marker constellations on vision-based tactile sensors. In contrast to recent approaches, our one-shot globally invariant point cloud registration suppresses cumulative drift and overcomes long-standing limitations in accurately estimating yaw (Z-axis) rotation. Experimental verifications show that InvariantCloud achieves superior yaw tracking accuracy and re-localization repeatability compared to existing benchmarks, demonstrating its precision and robustness in long-sequence manipulation tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
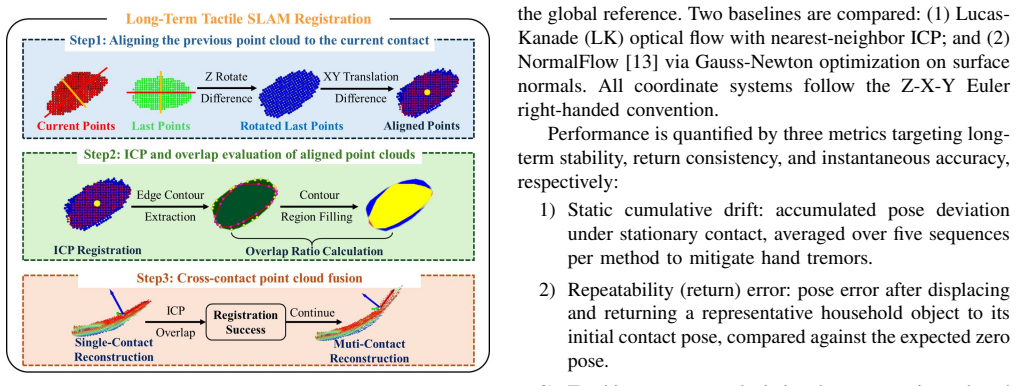
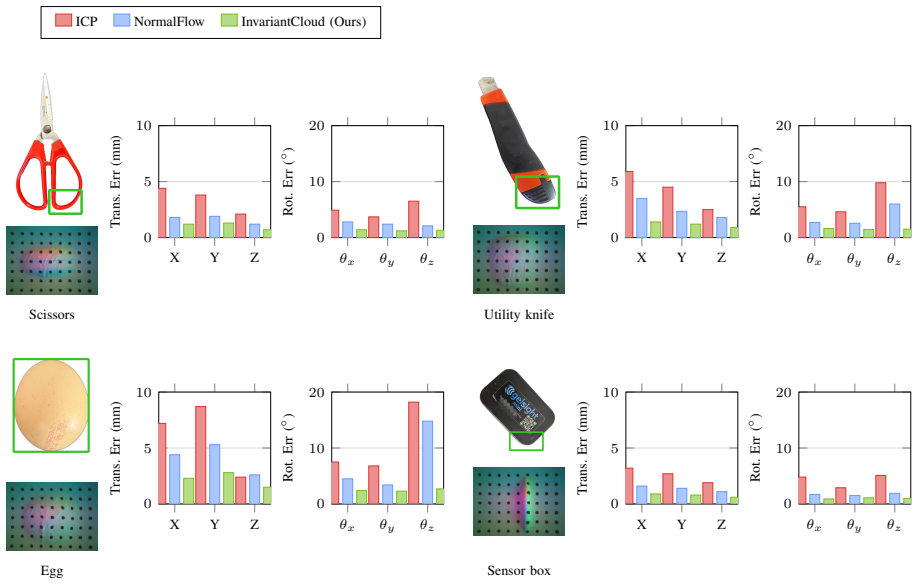
Summary. The manuscript introduces InvariantCloud, a 6-DoF pose estimation framework for vision-based tactile sensors that exploits globally invariant surface marker constellations to form a uniquely indexed point cloud. It performs one-shot registration against a reference model, claiming to suppress cumulative drift and resolve yaw (Z-axis) ambiguity that affects prior sequential methods. Experiments are reported to demonstrate superior yaw tracking accuracy and re-localization repeatability relative to existing benchmarks in long-sequence manipulation tasks.
Significance. If the invariance and unique-indexing properties can be realized without circular dependence on the pose being estimated, the framework would address a persistent limitation in tactile tracking for robotic manipulation, enabling drift-free operation over extended sequences. This would be particularly relevant for imitation learning pipelines that require reliable 6-DoF object poses.
major comments (2)
- [Abstract and §3] Abstract and §3 (framework description): the central claim that marker constellations yield a 'globally invariant, uniquely indexed point cloud' supporting reliable one-shot registration rests on an unexamined assumption. Vision-based tactile sensors typically produce visually identical markers; any geometric or descriptor-based indexing procedure that assigns unique indices must be shown to be strictly pose-independent. If the indexing step implicitly solves or approximates the 6-DoF correspondence problem, the asserted elimination of cumulative drift and yaw ambiguity does not follow.
- [§4] §4 (experimental verification): the reported gains in yaw accuracy and re-localization repeatability are presented as direct consequences of the one-shot invariant registration. Without an explicit ablation or derivation showing that the indexing step itself introduces neither drift nor yaw ambiguity, the performance advantage cannot be attributed to the claimed mechanism rather than to implementation details of the registration solver.
minor comments (2)
- [§3] Notation for the point-cloud indexing function should be introduced with a clear mathematical definition rather than descriptive prose only.
- [§2] The manuscript should include a concise statement of the sensor model (gel deformation, marker density, camera intrinsics) to allow readers to assess the generality of the invariance claim.
Simulated Author's Rebuttal
We thank the referee for the thorough review and constructive comments. We address each major comment below, agreeing where clarification or additional material is needed and outlining specific revisions.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (framework description): the central claim that marker constellations yield a 'globally invariant, uniquely indexed point cloud' supporting reliable one-shot registration rests on an unexamined assumption. Vision-based tactile sensors typically produce visually identical markers; any geometric or descriptor-based indexing procedure that assigns unique indices must be shown to be strictly pose-independent. If the indexing step implicitly solves or approximates the 6-DoF correspondence problem, the asserted elimination of cumulative drift and yaw ambiguity does not follow.
Authors: The referee correctly notes that explicit demonstration of pose-independence is required. The indexing in InvariantCloud relies on intrinsic geometric invariants (normalized inter-marker distances and angles computed from the fixed sensor layout) that are independent of absolute pose; these descriptors are matched against the reference model without solving for 6-DoF transformation. However, the manuscript presents this at a high level without a dedicated derivation. We will revise §3 to add a formal proof of pose-independence together with a worked numerical example showing that indexing remains unchanged under arbitrary rigid transformations. revision: yes
-
Referee: [§4] §4 (experimental verification): the reported gains in yaw accuracy and re-localization repeatability are presented as direct consequences of the one-shot invariant registration. Without an explicit ablation or derivation showing that the indexing step itself introduces neither drift nor yaw ambiguity, the performance advantage cannot be attributed to the claimed mechanism rather than to implementation details of the registration solver.
Authors: We agree that attribution of the observed gains requires explicit isolation of the indexing and registration components. The current experiments compare end-to-end performance but lack an ablation that disables the invariant indexing. In the revised manuscript we will add an ablation study in §4 that replaces the invariant one-shot registration with (i) sequential ICP-style matching and (ii) non-invariant descriptor matching, quantifying drift accumulation and yaw error in each case. This will directly link the performance advantage to the claimed mechanism. revision: yes
Circularity Check
No circularity detected; claims rest on empirical benchmarks without self-referential reduction
full rationale
The provided abstract and title present InvariantCloud as a framework that 'leverages the global invariance of surface marker constellations' for 'one-shot globally invariant point cloud registration' to suppress drift and improve yaw accuracy. No equations, fitting procedures, parameter estimation steps, or derivation chains are shown. No self-citations appear in the text. The central claims are framed as outcomes of 'experimental verifications' compared to benchmarks, satisfying the default expectation that the method is self-contained against external validation. The skeptic concern about unique indexing is noted but cannot be evaluated as circular without quoted paper text exhibiting a specific reduction (e.g., indexing defined in terms of the pose it claims to solve).
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
You Only Touch Once: 6-DoF Object Pose Estimation from Single Tactile Contact
A tactile system recovers 6-DoF object pose from one contact pair by coarse-to-fine localization of point clouds on a known model followed by normal-aware SVD.
Reference graph
Works this paper leans on
-
[1]
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Z. Fu, T. Z. Zhao, and C. Finn, “Mobile ALOHA: Learning bimanual mobile manipulation with low-cost whole-body teleoperation,” arXiv preprint arXiv:2401.02117, Jan. 2024. [Online]. Available: https://arxiv.org/abs/2401.02117
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[2]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Hausman, and B. Ichter, “pi0: A vision-language-action flow model for general robot control,” arXiv preprint arXiv:2410.24164, Oct. 2024. [Online]. Available: https://arxiv.org/abs/2410.24164
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[3]
A Survey on Vision-Language-Action Models for Embodied AI
Y . Ma, Z. Song, Y . Zhuang, J. Hao, and I. King, “A survey on vision-language-action models for embodied ai,”arXiv preprint arXiv:2405.14093, 2024. [Online]. Available: https://arxiv.org/abs/ 2405.14093
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[4]
Ecpc-icp: A 6d vehicle pose estimation method by fusing the roadside lidar point cloud and road feature,
B. Gu, J. Liu, H. Xiong, T. Li, and Y . Pan, “Ecpc-icp: A 6d vehicle pose estimation method by fusing the roadside lidar point cloud and road feature,”Sensors, vol. 21, no. 10, p. 3489, 2021
2021
-
[5]
H. Xue, J. Ren, W. Chen, G. Zhang, Y . Fang, G. Gu, H. Xu, and C. Lu, “Reactive diffusion policy: Slow-fast visual-tactile policy learning for contact-rich manipulation,”arXiv preprint arXiv:2503.02881, 2025. [Online]. Available: https://arxiv.org/abs/2503.02881
-
[7]
arXiv preprint arXiv:2508.08706 (2025)
[Online]. Available: https://arxiv.org/abs/2508.08706
-
[8]
Gelsight-mini,
GelSight, “Gelsight-mini,” Online. Available: https://www.gelsight. com/gelsightmini/, 2022
2022
-
[9]
9dtact: A compact vision-based tactile sensor for accurate 3d shape reconstruction and generalizable 6d force estimation,
C. Lin, H. Zhang, J. Xu, L. Wu, and H. Xu, “9dtact: A compact vision-based tactile sensor for accurate 3d shape reconstruction and generalizable 6d force estimation,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1–8, Feb. 2024
2024
-
[10]
Patchgraph: In- hand tactile tracking with learned surface normals,
P. Sodhi, M. Kaess, M. Mukadam, and S. Anderson, “Patchgraph: In- hand tactile tracking with learned surface normals,” inProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2022, pp. 2164–2170
2022
-
[11]
Neural feels with neural fields: Visuo-tactile percep- tion for in-hand manipulation,
S. Sureshet al., “Neural feels with neural fields: Visuo-tactile percep- tion for in-hand manipulation,”Science Robotics, vol. 9, no. 96, 2024, art. no. eadl0628
2024
-
[12]
Fingerslam: Closed-loop unknown object localization and reconstruction from visuo-tactile feedback,
J. Zhao, M. Bauza, and E. H. Adelson, “Fingerslam: Closed-loop unknown object localization and reconstruction from visuo-tactile feedback,” inProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 8033–8039
2023
-
[13]
Tac2structure: Object surface reconstruc- tion only through multi-times touch,
J. Lu, Z. Wan, and Y . Zhang, “Tac2structure: Object surface reconstruc- tion only through multi-times touch,”IEEE Robotics and Automation Letters, vol. 8, no. 3, pp. 1391–1398, Mar. 2023
2023
-
[14]
Normalflow: Fast, robust, and accurate contact-based object 6dof pose tracking with vision-based tactile sensors,
H.-J. Huang, M. Kaess, and W. Yuan, “Normalflow: Fast, robust, and accurate contact-based object 6dof pose tracking with vision-based tactile sensors,”IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 1–8, Jan. 2025
2025
-
[15]
Principal component anal- ysis,
S. Wold, K. H. Esbensen, and P. Geladi, “Principal component anal- ysis,”Chemometrics and Intelligent Laboratory Systems, vol. 2, no. 1–3, pp. 37–52, 1987
1987
-
[16]
Fast icp algorithms for shape registration,
J. Timotee, “Fast icp algorithms for shape registration,”Pattern Recog- nition, pp. 91–99, 2002
2002
-
[17]
Lucas-kanade 20 years on: A unifying framework,
S. Baker and I. Matthews, “Lucas-kanade 20 years on: A unifying framework,”International Journal of Computer Vision, vol. 56, no. 3, pp. 221–255, Mar. 2019
2019
-
[18]
A discussion of the solution for the best rotation to relate two sets of vectors,
W. Kabsch, “A discussion of the solution for the best rotation to relate two sets of vectors,”Acta Crystallographica Section A, vol. 34, no. 5, pp. 827–828, 1978
1978
-
[19]
GelSLAM: A real-time, high-fidelity, and robust 3D tactile SLAM system,
H. J. Huang, M. A. Mirzaee, M. Kaess, and W. Yuan, “GelSLAM: A real-time, high-fidelity, and robust 3D tactile SLAM system,” arXiv preprint arXiv:2508.15990, Aug. 2025. [Online]. Available: https://arxiv.org/abs/2508.15990
-
[20]
Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensing,
M. Comi, Y . Lin, A. Church, A. Tonioni, L. Aitchison, and N. F. Lepora, “Touchsdf: A deepsdf approach for 3d shape reconstruction using vision-based tactile sensing,”IEEE Robotics and Automation Letters, vol. 9, no. 6, pp. 5719–5726, 2024
2024
-
[21]
Gelbelt: A vision-based tactile sensor for continuous sensing of large surfaces,
M. A. Mirzaee, H.-J. Huang, and W. Yuan, “Gelbelt: A vision-based tactile sensor for continuous sensing of large surfaces,”IEEE Robotics and Automation Letters, vol. 10, no. 2, pp. 2016–2023, 2025
2016
-
[22]
Bilinear interpolation,
E. J. Kirkland, “Bilinear interpolation,” inAdvanced Computing in Electron Microscopy. Boston, MA: Springer, 2010
2010
-
[23]
Tac2Pose: Tactile object pose estimation from the first touch,
M. Bauza, A. Bronars, and A. Rodriguez, “Tac2Pose: Tactile object pose estimation from the first touch,”The International Journal of Robotics Research, 2023. [Online]. Available: https: //journals.sagepub.com/doi/10.1177/02783649231178913
-
[24]
Dynamic robotic bricklay- ing force-position control considering mortar dynamics for enhanced consistency,
Y . Zhou, B. Huang, B. Dong, and M. Duan, “Dynamic robotic bricklay- ing force-position control considering mortar dynamics for enhanced consistency,”Automation in Construction, vol. 174, p. 106090, 2025
2025
-
[25]
Contact-force-based closed-loop control of shell structure additive manufacturing with continuous- fiber-reinforced polymer composites,
Y . Yang, Y . Zhou, and M. Duan, “Contact-force-based closed-loop control of shell structure additive manufacturing with continuous- fiber-reinforced polymer composites,”Journal of Materials Processing Technology, vol. 331, p. 118501, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.