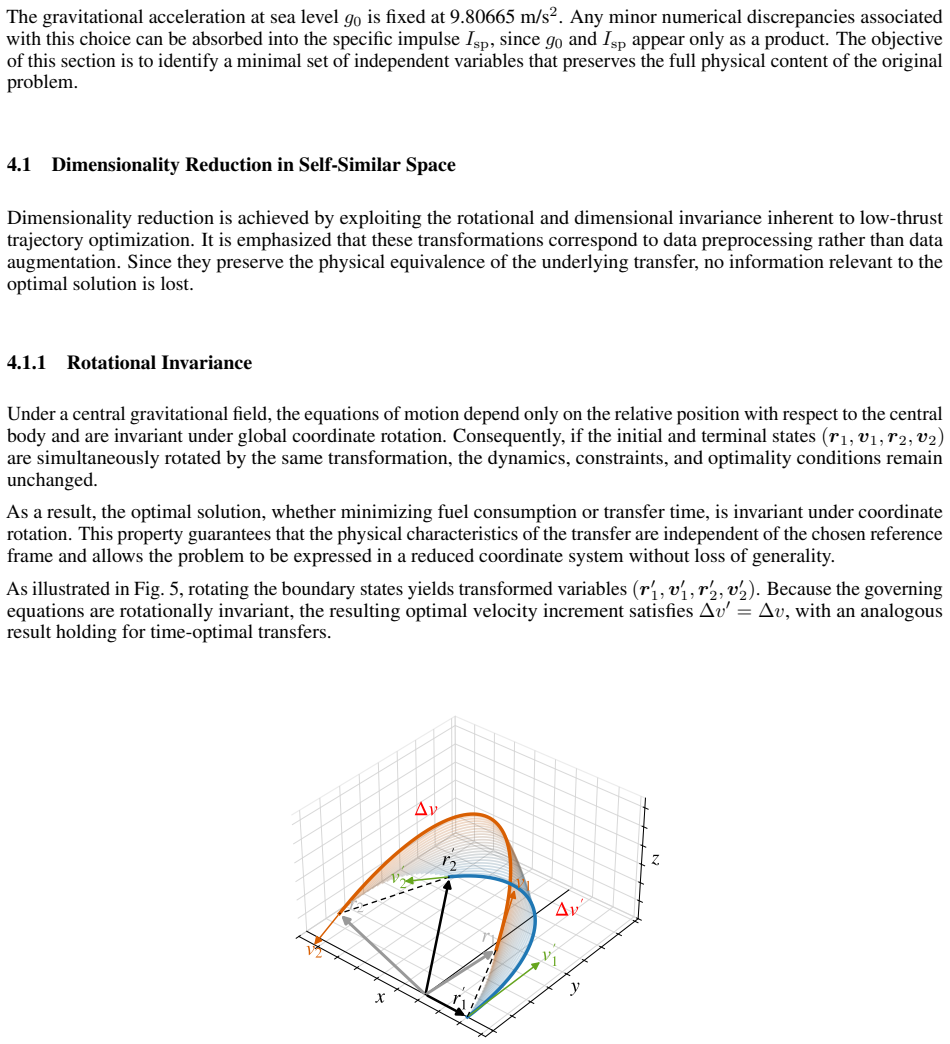
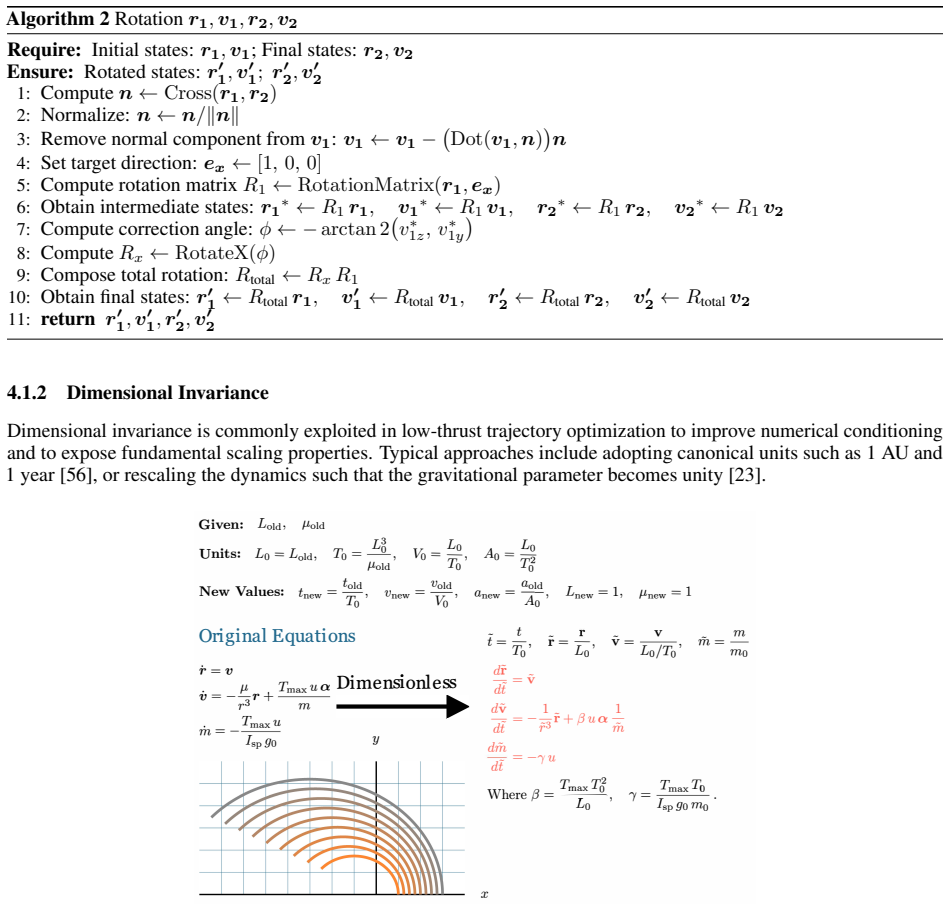
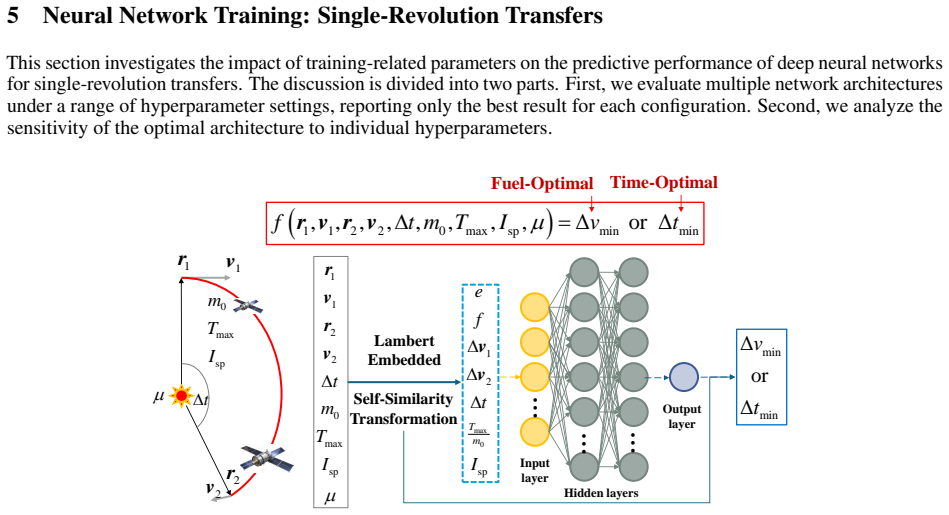
Pretrained Approximators for Low-Thrust Trajectory Cost and Reachability
Pith reviewed 2026-06-30 11:11 UTC · model grok-4.3
The pith
Machine learning models accurately predict fuel consumption and transfer times for low-thrust space trajectories
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
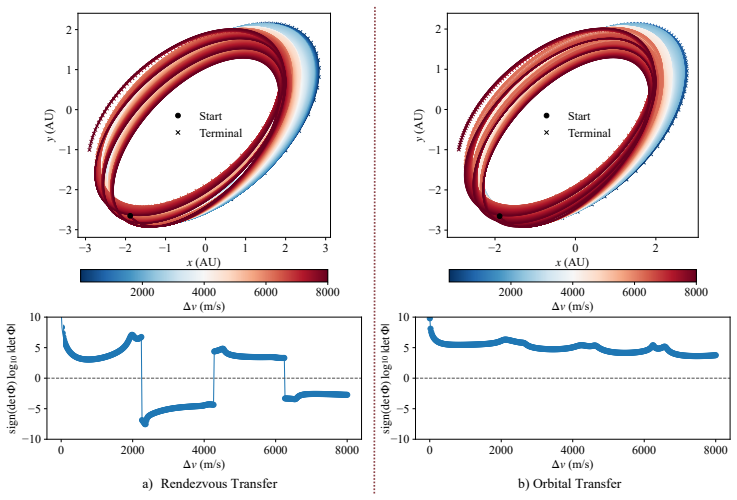
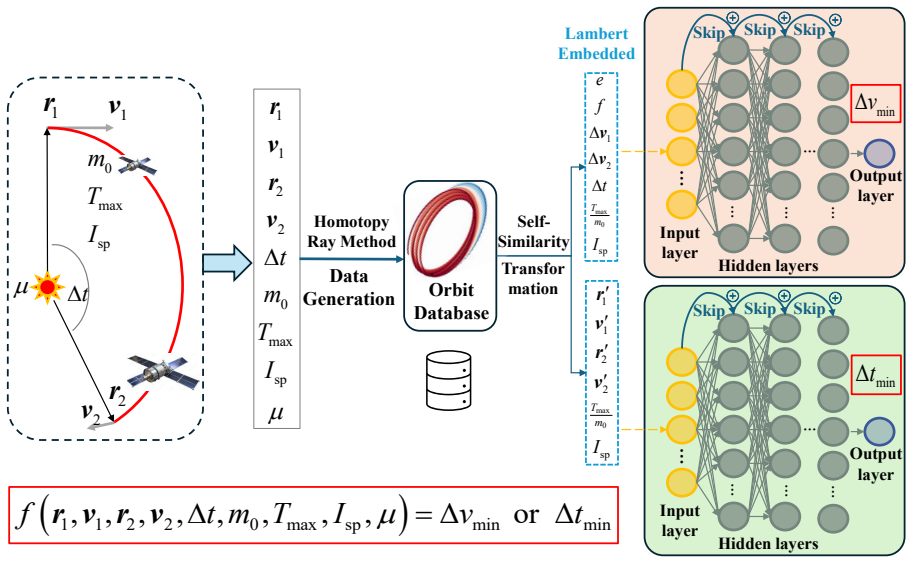
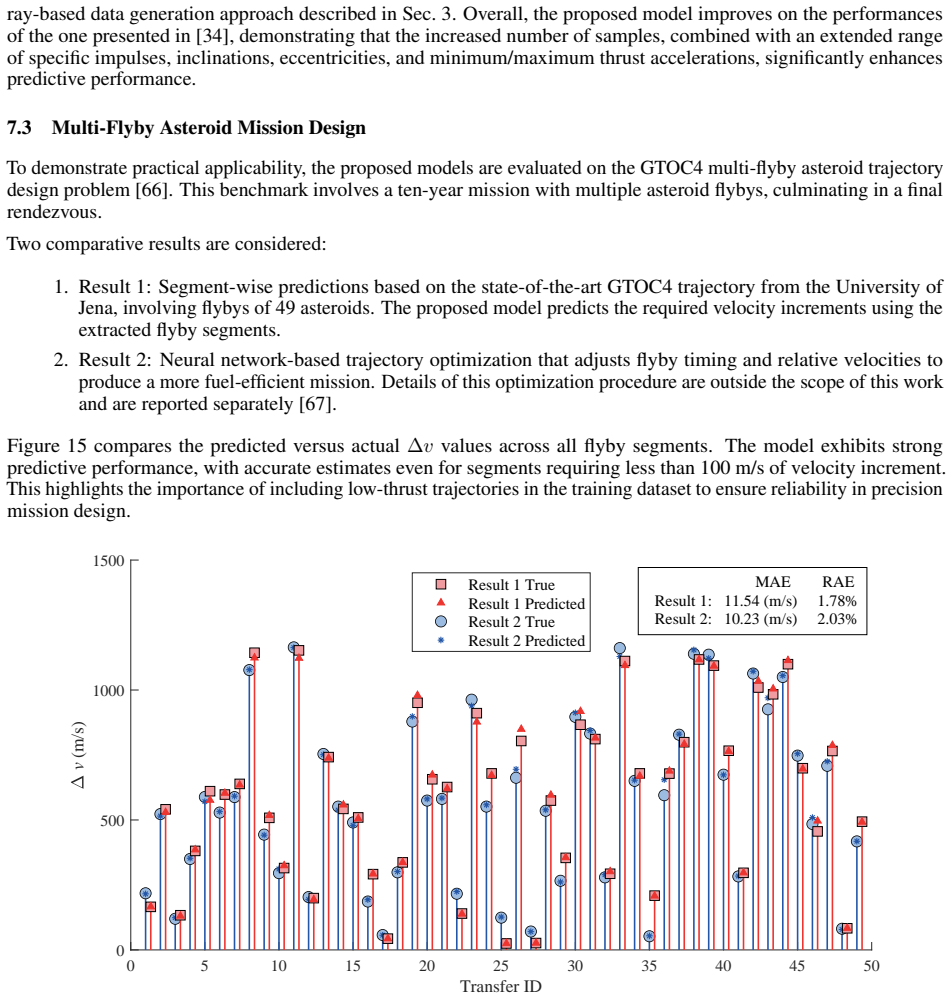
Low-thrust trajectory optimization follows a scaling law in which accuracy improves linearly with the logarithm of training data volume and network size. A homotopy-ray strategy generates a large dataset, and a self-similar transformation normalizes problems so that pretrained neural approximators predict optimal fuel consumption and minimum transfer time for single- and multi-revolution transfers. The same approximator applies without retraining to diverse orbital environments and mission classes, as demonstrated on benchmark cases and real mission designs.
What carries the argument
The self-similar transformation that normalizes the trajectory problem to let one neural network generalize across semi-major axes, inclinations, and central bodies.
If this is right
- Performance improves linearly with the logarithm of training data size and network parameters with no saturation observed in the tested range.
- The same approximator handles both single- and multi-revolution transfers across varied mission types.
- Fast surrogate evaluations replace repeated optimal control solves and enable scalable design over wide scenario ranges.
- Models and datasets are released open-source for community use.
Where Pith is reading between the lines
- The scaling observation implies that further accuracy gains are available simply by collecting more data rather than redesigning the model architecture.
- Quick cost estimates could be inserted inside global optimization loops to prune infeasible branches earlier in multi-asteroid or multi-leg tours.
- Lightweight versions of these surrogates might support onboard replanning if inference speed meets real-time constraints.
- The same normalization idea could be tested on problems that include additional forces such as third-body gravity or solar sails.
Load-bearing premise
The self-similar transformation lets one trained model generalize to new semi-major axes, inclinations, and central bodies without retraining.
What would settle it
Testing the model on transfers around a new central body such as the Sun for comet rendezvous and checking whether prediction error stays comparable to the training distribution would confirm or refute the generalization claim.
Figures

read the original abstract
Low-thrust trajectory design relies heavily on repeated evaluations of fuel consumption and transfer feasibility, which require expensive optimal control solutions. In this work, we show these quantities can be accurately approximated by machine learning surrogates, enabling fast and scalable evaluation across a wide range of scenarios. By increasing both dataset size and model capacity, we observe that low-thrust trajectory optimization follows a scaling law, with performance improving linearly with the logarithm of training data and network parameters, and no evidence of saturation within the explored regime. Guided by this observation, we construct a large-scale dataset using the proposed homotopy-ray strategy tailored to mission design requirements. A key is the introduction of a self-similar transformation, which allows generalization across semi-major axes, inclinations, and central bodies avoiding retraining. As a result, the same neural approximator can be applied to diverse orbital environments and mission classes. The proposed models accurately predict optimal fuel consumption and minimum transfer time for single- and multi-revolution transfers. Their performance and generalization are demonstrated on a public dataset, a multi-asteroid flyby problem from the Global Trajectory Optimization Competition, and an asteroid rendezvous mission design. The models and datasets are released as open-source to support the space community.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
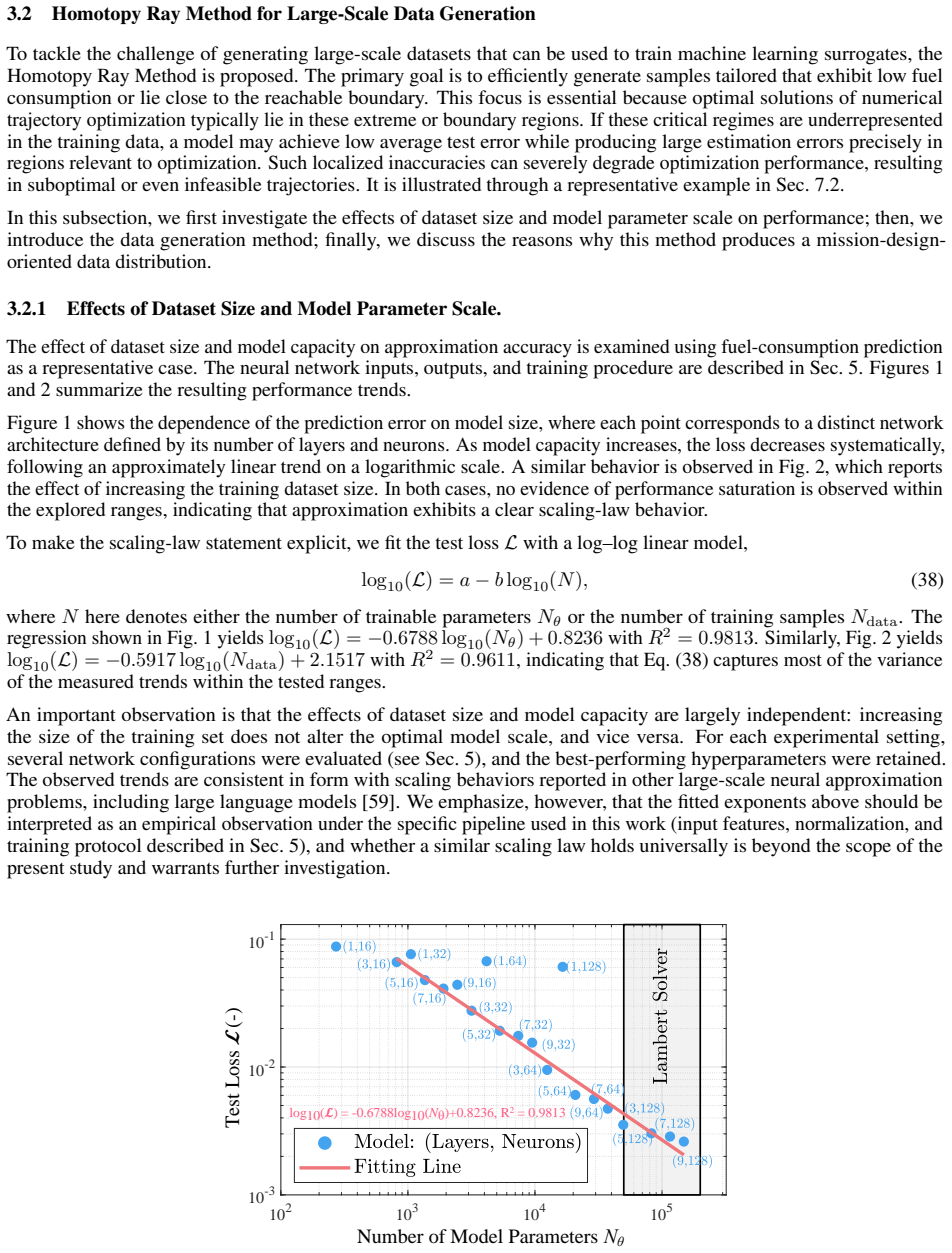
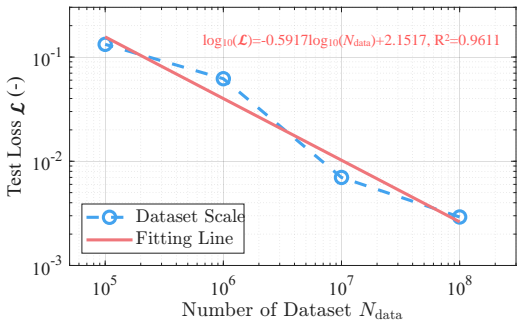
Summary. The paper claims that neural network surrogates can accurately approximate optimal fuel consumption and minimum transfer time for low-thrust single- and multi-revolution trajectories. A self-similar transformation is introduced to normalize across semi-major axis, inclination, and central-body gravitational parameter μ, enabling the same pretrained model to generalize without retraining. Performance is shown via scaling laws with dataset size and model capacity, a large homotopy-ray dataset, and demonstrations on a public dataset, a GTOC multi-asteroid flyby, and an asteroid rendezvous mission; models and data are released openly.
Significance. If the accuracy and cross-body generalization claims hold, the surrogates would enable fast, scalable low-thrust mission design evaluations that replace repeated optimal-control solves. The observed scaling law, open release of models/datasets, and focus on mission-relevant quantities (fuel and time) are concrete strengths that could support downstream trajectory optimization pipelines.
major comments (2)
- [Abstract] Abstract and generalization section: the headline claim that the self-similar transformation yields accurate zero-shot predictions for arbitrary central bodies (different μ) is not supported by the reported experiments. All cited demonstrations (public dataset, GTOC flyby, asteroid rendezvous) use solar μ; no independent test with a different central body or explicit μ variation is provided, leaving the invariance unverified.
- [Abstract] Abstract: the assertions of accuracy and generalization are stated without any quantitative error metrics, validation splits, ablation studies, or reported test-set performance numbers, making it impossible to assess whether the models meet the claimed fidelity or whether post-hoc dataset choices affect results.
minor comments (2)
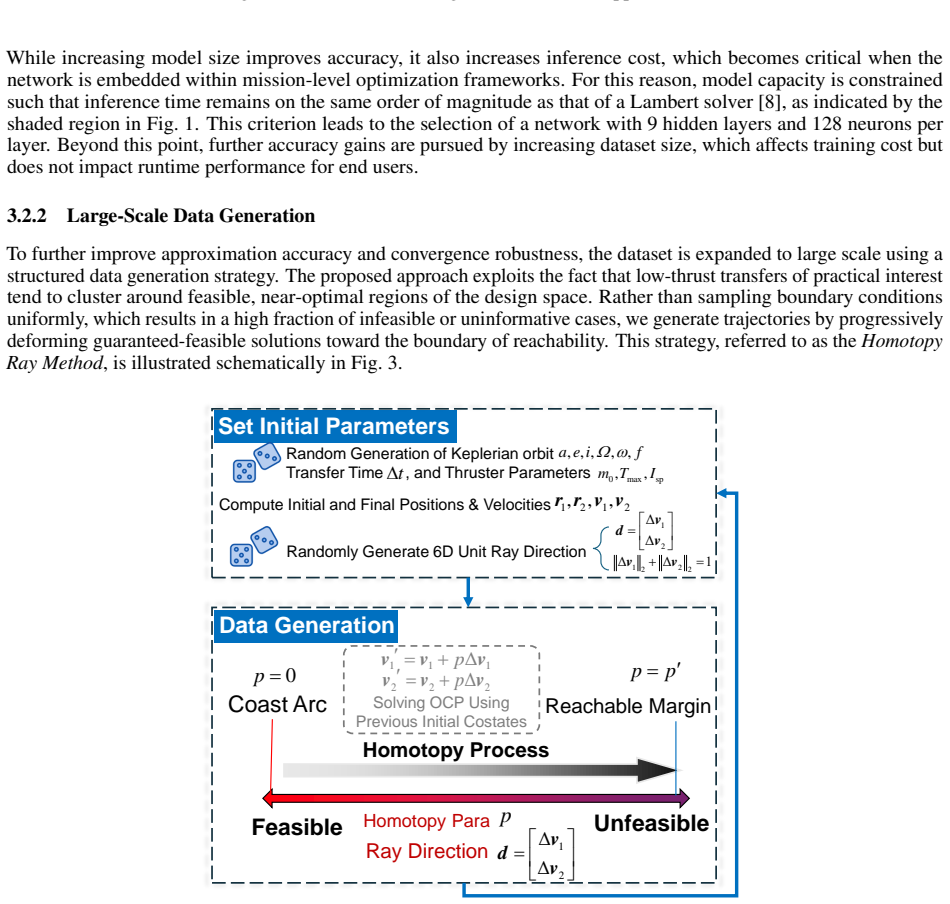
- The homotopy-ray dataset generation strategy is referenced but would benefit from an explicit algorithmic outline or pseudocode to support reproducibility.
- Clarify whether the self-similar transformation exactly cancels all μ dependence in the thrust-acceleration and time-of-flight terms or whether residual effects remain.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope of our claims. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract and generalization section: the headline claim that the self-similar transformation yields accurate zero-shot predictions for arbitrary central bodies (different μ) is not supported by the reported experiments. All cited demonstrations (public dataset, GTOC flyby, asteroid rendezvous) use solar μ; no independent test with a different central body or explicit μ variation is provided, leaving the invariance unverified.
Authors: The referee is correct that all reported numerical demonstrations use solar μ. The self-similar transformation is constructed so that the normalized problem is independent of μ, providing a theoretical basis for zero-shot transfer; however, this invariance has not been empirically verified with a non-solar central body in the current experiments. We will revise the abstract and the generalization section to qualify the claim accordingly, stating that generalization across μ follows from the transformation properties while noting the absence of cross-μ empirical tests. revision: partial
-
Referee: [Abstract] Abstract: the assertions of accuracy and generalization are stated without any quantitative error metrics, validation splits, ablation studies, or reported test-set performance numbers, making it impossible to assess whether the models meet the claimed fidelity or whether post-hoc dataset choices affect results.
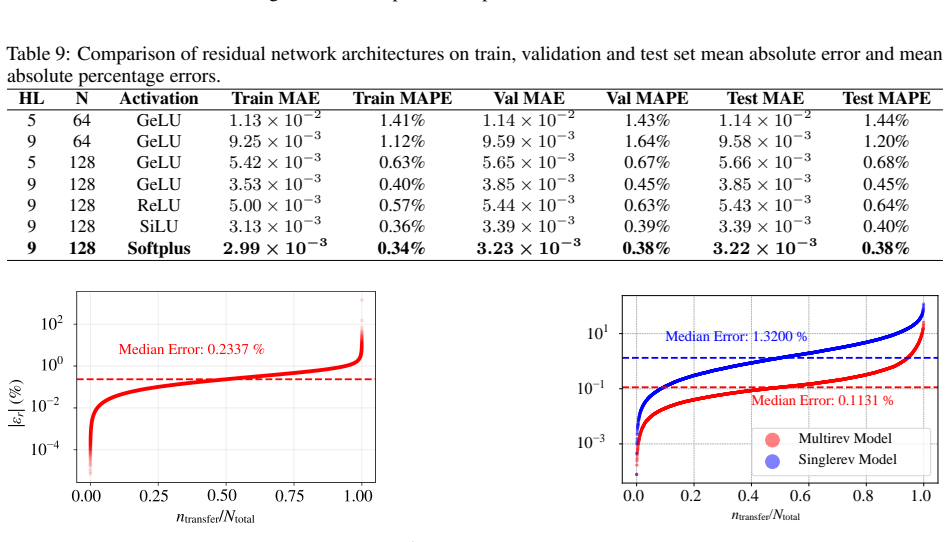
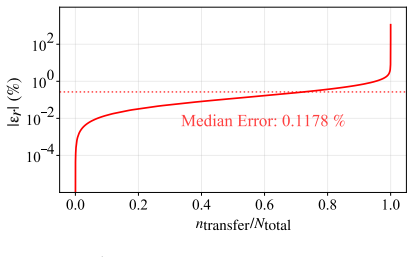
Authors: We agree that the abstract would be strengthened by the inclusion of concrete performance numbers. In the revised manuscript we will add specific quantitative results (e.g., mean relative error on held-out test sets for fuel and time predictions) together with a brief statement of the validation protocol and dataset scale. revision: yes
Circularity Check
No circularity: empirical training and held-out validation on generated dataset
full rationale
The paper generates a dataset via homotopy-ray optimal control, applies a self-similar change of variables, trains neural approximators, and reports accuracy on held-out data plus external benchmarks (GTOC, asteroid rendezvous). No equation reduces a claimed prediction to a fitted constant or prior self-citation by construction; the self-similar transform is an explicit modeling choice whose cross-body generalization is tested rather than presupposed. Central claims rest on standard supervised learning with scaling-law observations, not on any of the enumerated circular patterns.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
The Maximum Initial Mass
Introduces maximum-initial-mass optimal control problem for low-thrust transfers, establishes correspondence to minimum-time extremals, and applies it to recover global solutions for a GTO-to-GEO benchmark.
Reference graph
Works this paper leans on
-
[1]
M. D. Rayman, P. A. Chadbourne, J. S. Culwell, S. N. Williams, Mission design for deep space 1: A low-thrust technology validation mission, Acta Astronautica 45 (4) (1999) 381–388. doi:10.1016/S0094-5765(99) 00157-5
-
[2]
J. Kawaguchi, A. Fujiwara, T. Uesugi, Hayabusa—Its technology and science accomplishment summary and Hayabusa-2, Acta Astronautica 62 (10) (2008) 639–647.doi:10.1016/j.actaastro.2008.01.028. 30
-
[3]
J. Benkhoff, J. van Casteren, H. Hayakawa, M. Fujimoto, H. Laakso, M. Novara, P. Ferri, H. R. Middleton, R. Ziethe, BepiColombo—Comprehensive exploration of Mercury: Mission overview and science goals, Planetary and Space Science 58 (1) (2010) 2–20.doi:10.1016/j.pss.2009.09.020
-
[4]
D. Y . Oh, S. Collins, T. Drain, W. Hart, T. Imken, K. Larson, D. Marsh, D. Muthulingam, J. S. Snyder, D. Trofimov, Development of the Psyche mission for NASA’s discovery program, in: 36th International Electric Propulsion Conference, Vienna, Austria, 2019, iEPC-2019-192
2019
-
[5]
Zhang, N
Z. Zhang, N. Zhang, X. Guo, D. Wu, X. Xie, J. Yang, F. Jiang, H. Baoyin, Sustainable Asteroid Mining: On the design of GTOC12 problem and summary of results, Astrodynamics 9 (1) (2025) 3–17. doi:10.1007/ s42064-024-0199-3
2025
-
[6]
Z. Zhang, N. Zhang, Z. Chen, F. Jiang, H. Baoyin, J. Li, Global Trajectory Optimization of Multispacecraft Successive Rendezvous Using Multitree Search, Journal of Guidance, Control, and Dynamics 47 (3) (2024) 503–517.doi:10.2514/1.G007764
-
[7]
T. N. Edelbaum, Propulsion requirements for controllable satellites, ARS Journal 31 (8) (1961) 1079–1089. doi:10.2514/8.5723
-
[8]
Izzo, Revisiting Lambert’s problem, Celestial Mechanics and Dynamical Astronomy 121 (1) (2015) 1–15
D. Izzo, Revisiting Lambert’s problem, Celestial Mechanics and Dynamical Astronomy 121 (1) (2015) 1–15. doi:10.1007/s10569-014-9587-y
-
[9]
R. M. Woollands, A. Bani Younes, J. L. Junkins, New solutions for the perturbed lambert problem using regularization and picard iteration, Journal of Guidance, Control, and Dynamics 38 (9) (2015) 1548–1562. doi:10.2514/1.G001028
-
[10]
R. P. Russell, Complete Lambert Solver Including Second-Order Sensitivities, Journal of Guidance, Control, and Dynamics 45 (2) (2022) 196–212.doi:10.2514/1.G006089
-
[11]
B. J. Wall, B. A. Conway, Shape-Based Approach to Low-Thrust Rendezvous Trajectory Design, Journal of Guidance, Control, and Dynamics 32 (1) (2009) 95–101.doi:10.2514/1.36848
-
[12]
D. Wu, T. Zhang, Y . Zhong, F. Jiang, J. Li, Analytical shaping method for low-thrust rendezvous trajectory using cubic spline functions, Acta Astronautica 193 (2022) 511–520.doi:10.1016/j.actaastro.2022.01.019
-
[13]
P. Gurfil, Analysis of J2-perturbed motion using mean non-osculating orbital elements, Celestial Mechanics and Dynamical Astronomy 90 (3) (2004) 289–306.doi:10.1007/s10569-004-0890-x
-
[14]
L. Casalino, Approximate optimization of low-thrust transfers between low-eccentricity close orbits, Journal of Guidance, Control, and Dynamics 37 (3) (2014) 1003–1008.doi:10.2514/1.62046
-
[15]
D. Hennes, D. Izzo, D. Landau, Fast approximators for optimal low-thrust hops between main belt asteroids, in: 2016 IEEE Symposium Series on Computational Intelligence (SSCI), IEEE, Athens, Greece, 2016, pp. 1–7. doi:10.1109/SSCI.2016.7850107
-
[16]
H. Shen, L. Casalino, Simple ∆V approximation for optimization of debris-to-debris transfers, Journal of Spacecraft and Rockets 58 (2) (2021) 575–580.doi:10.2514/1.A34831
-
[17]
A. Petropoulos, D. Grebow, D. Jones, G. Lantoine, A. Nicholas, J. Roa, J. Senent, J. Stuart, N. Arora, T. Pavlak, T. Lam, T. McElrath, R. Roncoli, D. Garza, N. Bradley, D. Landau, Z. Tarzi, F. Laipert, E. Bonfiglio, M. Wallace, J. Sims, GTOC9: Results from the Jet Propulsion Laboratory (team JPL), Acta Futura 11 (2018) 25–35. doi: 10.5281/zenodo.1139152
-
[18]
Z. Zhang, N. Zhang, X. Guo, D. Wu, X. Xie, J. Li, J. Yang, S. Chen, F. Jiang, H. Baoyin, H. Li, H. Zheng, X. Duan, GTOC 11: Results from Tsinghua University and Shanghai Institute of Satellite Engineering, Acta Astronautica 202 (2023) 819–828.doi:10.1016/j.actaastro.2022.06.028
-
[19]
J. Park, I. W. Sandberg, Universal Approximation Using Radial-Basis-Function Networks, Neural Computation 3 (2) (1991) 246–257.doi:10.1162/neco.1991.3.2.246
-
[20]
N. Harl, K. Rajagopal, S. N. Balakrishnan, Neural Network Based Modified State Observer for Orbit Uncertainty Estimation, Journal of Guidance, Control, and Dynamics 36 (4) (2013) 1194–1209.doi:10.2514/1.55711
-
[21]
Wilson, M
C. Wilson, M. Vasile, Generation and classification of critical points in uncertain N-body problems via machine learning, in: 75th International Astronautical Congress (IAC 2024), Milan, Italy, 2024, pp. IAC–24–C1.9.8
2024
-
[22]
L. Federici, A. Scorsoglio, L. Ghilardi, A. D’Ambrosio, B. Benedikter, A. Zavoli, R. Furfaro, Image-Based Meta-Reinforcement Learning for Autonomous Guidance of an Asteroid Impactor, Journal of Guidance, Control, and Dynamics 45 (11) (2022) 2013–2028.doi:10.2514/1.G006832
-
[23]
D. Izzo, E. Öztürk, Real-Time Guidance for Low-Thrust Transfers Using Deep Neural Networks, Journal of Guidance, Control, and Dynamics 44 (2) (2021) 315–327.doi:10.2514/1.G005254. 31
-
[24]
D. Izzo, S. Origer, Neural representation of a time optimal, constant acceleration rendezvous, Acta Astronautica 204 (2023) 510–517.doi:10.1016/j.actaastro.2022.08.045
-
[25]
M. Pugliatti, A. Scorsoglio, R. Furfaro, F. Topputo, Onboard State Estimation Around Didymos With Recurrent Neural Networks and Segmentation Maps, IEEE Transactions on Aerospace and Electronic Systems 60 (3) (2024) 2542–2554.doi:10.1109/TAES.2023.3288506
-
[26]
G. Acciarini, A. G. Baydin, D. Izzo, Closing the gap between sgp4 and high-precision propagation via differentiable programming, Acta Astronautica 226 (2025) 694–701.doi:10.1016/j.actaastro.2024.10.063
-
[27]
D. Izzo, E. Blazquez, R. Ferede, S. Origer, C. D. Wagter, G. C. H. E. de Croon, Optimality principles in spacecraft neural guidance and control, Science Robotics 9 (91) (2024) 6421.doi:10.1126/scirobotics.adi6421
-
[28]
Y . Zhu, Y . Luo, Fast Evaluation of Low-Thrust Transfers via Multilayer Perceptions, Journal of Guidance, Control, and Dynamics 42 (12) (2019) 2627–2637.doi:10.2514/1.G004080
-
[29]
A. Mereta, D. Izzo, A. Wittig, Machine learning of optimal low-thrust transfers between near-earth objects, in: F. J. Martínez de Pisón, R. Urraca, H. Quintián, E. Corchado (Eds.), Hybrid Artificial Intelligent Systems, Springer International Publishing, Cham, 2017, pp. 543–553.doi:10.1007/978-3-319-59650-1_46
-
[30]
H. Li, S. Chen, D. Izzo, H. Baoyin, Deep networks as approximators of optimal low-thrust and multi-impulse cost in multitarget missions, Acta Astronautica 166 (2020) 469–481.doi:10.1016/j.actaastro.2019.09.023
-
[31]
R. Xie, A. G. Dempster, An on-line deep learning framework for low-thrust trajectory optimisation, Aerospace Science and Technology 118 (2021) 107002.doi:10.1016/j.ast.2021.107002
-
[32]
X. Guo, D. Ren, D. Wu, F. Jiang, DNN estimation of low-thrust transfer time: Focusing on fast transfers in multi-asteroid rendezvous missions, Acta Astronautica 204 (2023) 518–530. doi:10.1016/j.actaastro. 2022.09.006
-
[33]
A. H. Mughal, P. Chadalavada, A. Munir, A. Dutta, M. A. Qureshi, Design of deep neural networks for transfer time prediction of spacecraft electric orbit-raising, Intelligent Systems with Applications 15 (2022) 200092. doi:10.1016/j.iswa.2022.200092
-
[34]
G. Acciarini, L. Beauregard, D. Izzo, Computing low-thrust transfers in the asteroid belt, a comparison between astrodynamical manipulations and a machine learning approach, in: 29th International Symposium on Space Flight Dynamics (ISSFD 2024), Darmstadt, Germany, 2024.doi:10.48550/arXiv.2405.18918
-
[35]
Y . Song, S. Gong, Solar-sail trajectory design for multiple near-earth asteroid exploration based on deep neural networks, Aerospace Science and Technology 91 (2019) 28–40.doi:10.1016/j.ast.2019.04.056
-
[36]
A. Huang, S. Wu, Neural network-based approximation model for perturbed orbit rendezvous, Mathematics 10 (14).doi:10.3390/math10142489
-
[38]
C. Sánchez-Sánchez, D. Izzo, D. Hennes, Learning the optimal state-feedback using deep networks, in: 2016 IEEE Symposium Series on Computational Intelligence (SSCI), 2016, pp. 1–8. doi:10.1109/SSCI.2016.7850105
- [39]
-
[40]
L. Cheng, Z. Wang, Y . Song, F. Jiang, Real-time optimal control for irregular asteroid landings using deep neural networks, Acta Astronautica 170 (2020) 66–79.doi:10.1016/j.actaastro.2019.11.039
-
[41]
L. Cheng, Z. Wang, F. Jiang, C. Zhou, Real-time optimal control for spacecraft orbit transfer via multiscale deep neural networks, IEEE Transactions on Aerospace and Electronic Systems 55 (5) (2018) 2436–2450. doi:10.1109/TAES.2018.2889571
-
[42]
E. Gaglio, R. Bevilacqua, Machine learning-based quasi-optimal feedback control for a propellantless re-entry, Acta Astronautica 228 (2025) 274–284.doi:10.1016/j.actaastro.2024.11.047
-
[43]
D. Tailor, D. Izzo, Learning the optimal state-feedback via supervised imitation learning, Astrodynamics 3 (4) (2019) 361–374.doi:10.1007/s42064-019-0054-0
-
[44]
L. Federici, B. Benedikter, A. Zavoli, Deep learning techniques for autonomous spacecraft guidance during proximity operations, Journal of Spacecraft and Rockets 58 (6) (2021) 1774–1785.doi:10.2514/1.A35076
-
[45]
B. Gaudet, R. Linares, R. Furfaro, Deep reinforcement learning for six degree-of-freedom planetary landing, Advances in Space Research 65 (7) (2020) 1723–1741.doi:10.1016/j.asr.2019.12.030. 32
-
[46]
B. Gaudet, R. Linares, R. Furfaro, Adaptive guidance and integrated navigation with reinforcement meta-learning, Acta Astronautica 169 (2020) 180–190.doi:10.1016/j.actaastro.2020.01.007
-
[47]
A. Evans, R. Armellin, H. Holt, L. Pirovano, Fuel-optimal guidance using costate supervised learning with local refinement, Acta Astronautica 228 (2025) 17–29.doi:10.1016/j.actaastro.2024.11.031
-
[48]
H. Holt, R. Armellin, Reinforcement learning enhanced lqr and control lyapunov functions for spacecraft proximity operations, IEEE Transactions on Robotics 41 (2025) 5117–5129.doi:10.1109/TRO.2025.3600160
-
[49]
H. Holt, N. Baresi, R. Armellin, Reinforced lyapunov controllers for low-thrust lunar transfers, Astrodynamics 8 (4) (2024) 633–656.doi:10.1007/s42064-024-0212-x
-
[50]
Z. Sun, Z. Zhang, L. Cheng, D. Wu, S. Gong, Guaranteed safety and stability neural guidance for asteroid landing under collision avoidance constraints, Aerospace Science and Technology (2025) 110758doi:10.1016/j.ast. 2025.110758
-
[51]
D. Izzo, S. Origer, G. Acciarini, F. Biscani, High-order expansion of neural ordinary differential equation flows, Science Advances 11 (51) (2025) eady1348.doi:10.1126/sciadv.ady1348
-
[52]
M. J. H. Walker, B. Ireland, J. Owens, A set modified equinoctial orbit elements, Celestial mechanics 36 (4) (1985) 409–419.doi:10.1007/BF01227493
-
[53]
J. L. Junkins, E. Taheri, Exploration of Alternative State Vector Choices for Low-Thrust Trajectory Optimization, Journal of Guidance, Control, and Dynamics 42 (1) (2019) 47–64.doi:10.2514/1.G003686
-
[54]
Y . Gao, C. Kluever, Low-Thrust Interplanetary Orbit Transfers Using Hybrid Trajectory Optimization Method with Multiple Shooting, in: AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Guidance, Navigation, and Control and Co-located Conferences, American Institute of Aeronautics and Astronautics, 2004. doi: 10.2514/6.2004-5088
-
[55]
R. Bertrand, R. Epenoy, New smoothing techniques for solving bang–bang optimal control problems—numerical results and statistical interpretation, Optimal Control Applications and Methods 23 (4) (2002) 171–197. doi: 10.1002/oca.709
-
[56]
F. Jiang, H. Baoyin, J. Li, Practical Techniques for Low-Thrust Trajectory Optimization with Homotopic Approach, Journal of Guidance, Control, and Dynamics 35 (1) (2012) 245–258.doi:10.2514/1.52476
-
[57]
J. J. Moré, B. S. Garbow, K. E. Hillstrom, User guide for MINPACK-1, Tech. rep., Argonne National Lab., IL (USA) (Aug. 1980).doi:10.2172/6997568
-
[58]
W. S. Levine, The Control Systems Handbook: Control System Advanced Methods, Second Edition, CRC Press, United States, 2018
2018
-
[59]
Scaling Laws for Neural Language Models
J. Kaplan, S. McCandlish, T. Henighan, T. B. Brown, B. Chess, R. Child, S. Gray, A. Radford, J. Wu, D. Amodei, Scaling laws for neural language models, arXiv preprintdoi:10.48550/arXiv.2001.08361
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2001.08361 2001
-
[60]
Loshchilov, F
I. Loshchilov, F. Hutter, Decoupled Weight Decay Regularization, in: International Conference on Learning Representations, New Orleans, LA, USA, 2019
2019
-
[61]
R. Llugsi, S. E. Yacoubi, A. Fontaine, P. Lupera, Comparison between Adam, AdaMax and Adam W optimizers to implement a Weather Forecast based on Neural Networks for the Andean city of Quito, in: 2021 IEEE Fifth Ecuador Technical Chapters Meeting (ETCM), 2021, pp. 1–6.doi:10.1109/ETCM53643.2021.9590681
-
[62]
L. N. Smith, N. Topin, Super-convergence: Very fast training of neural networks using large learning rates, in: Artificial Intelligence and Machine Learning for Multi-Domain Operations Applications, V ol. 11006, SPIE, 2019, pp. 369–386.doi:10.1117/12.2520589
-
[63]
E. Taheri, J. L. Junkins, How Many Impulses Redux, The Journal of the Astronautical Sciences 67 (2) (2020) 257–334.doi:10.1007/s40295-019-00203-1
-
[64]
X. Guo, D. Wu, F. Jiang, Minimum-Time Rendezvous via Simplified Initial Costate Normalization and Auxiliary Orbital Transfer, Journal of Guidance, Control, and Dynamics 46 (8) (2023) 1627–1636. doi:10.2514/1. G007268
work page doi:10.2514/1 2023
-
[65]
K. He, X. Zhang, S. Ren, J. Sun, Deep residual learning for image recognition, in: 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), IEEE, IEEE Computer Society, Las Vegas, NV , USA, 2016, pp. 770–778.doi:10.1109/CVPR.2016.90
-
[66]
I. S. Grigoriev, M. P. Zapletin, Choosing promising sequences of asteroids, Automation and Remote Control 74 (8) (2013) 1284–1296.doi:10.1134/S0005117913080055
-
[67]
Z. Zhang, X. Guo, D. Wu, H. Baoyin, J. Li, F. Topputo, Global optimality in multi-flyby asteroid trajectory optimization: Theory and application techniques, Journal of Guidance, Control, and Dynamics Online (2026) 1–16.doi:10.2514/1.G009335. 33
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.