Identifiability Without Gaussianity: Symbolic World Models and Near-Infinite Temporal Consistency
Pith reviewed 2026-06-27 11:11 UTC · model grok-4.3
The pith
Symbolic grounding in causal dynamics achieves exact linear identifiability and near-infinite temporal consistency without requiring Gaussian latent processes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
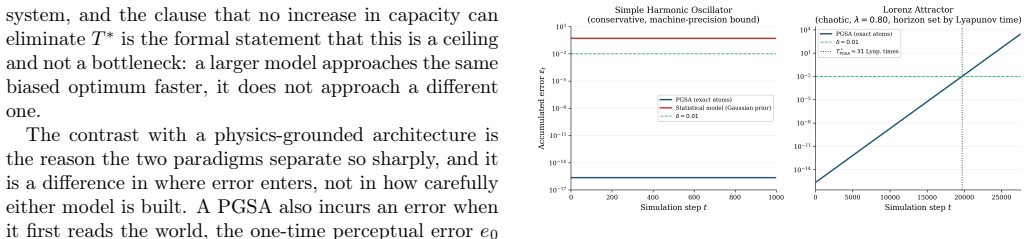
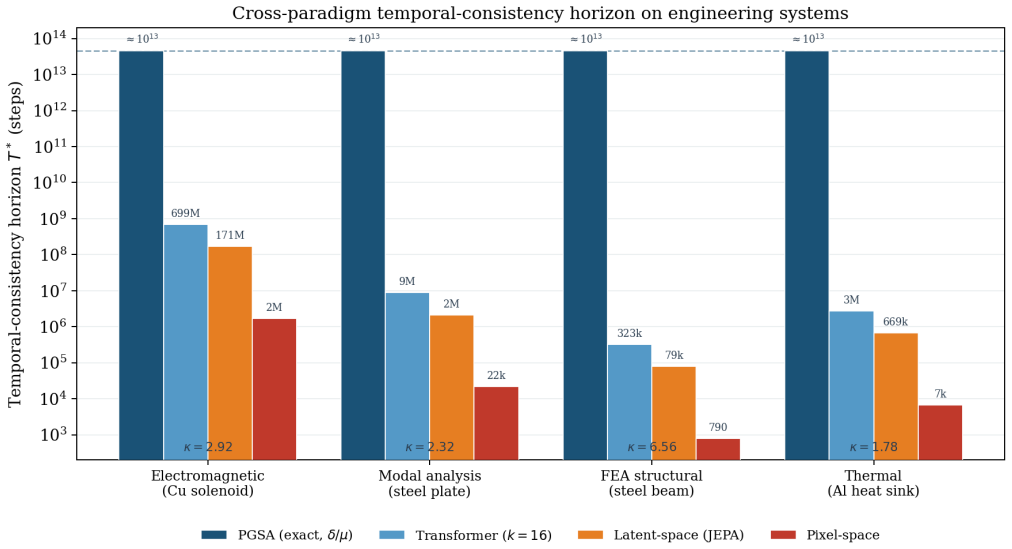
A PGSA achieves exact linear identifiability for all physical regimes, regardless of the latent distribution; the per-step error of a PGSA is bounded by numerical precision alone; and a PGSA maintains temporal consistency for an unbounded number of transitions, a property termed near-infinite temporal consistency. Statistical World Models cannot achieve this property for any non-Gaussian system, regardless of model capacity or the volume of training data.
What carries the argument
The Physics-Grounded Symbolic Architecture (PGSA), which symbolically grounds representations directly in the causal generator of the world's dynamics instead of statistical alignment.
If this is right
- Exact linear recovery of latent variables holds in every physical regime, including non-Gaussian ones.
- Representation error per transition remains at floating-point precision levels for any number of steps.
- Near-infinite temporal consistency follows directly for any system whose dynamics admit a causal symbolic generator.
- Statistical architectures are provably limited to monotonic error growth in non-Gaussian regimes.
Where Pith is reading between the lines
- The result suggests that any domain whose underlying generator can be expressed symbolically may support long-horizon simulation without cumulative drift.
- Hybrid systems that combine statistical perception with symbolic dynamics grounding could inherit the consistency guarantee while retaining flexibility on perception tasks.
- Empirical tests on physical simulators with known non-Gaussian noise could directly measure whether observed consistency matches the numerical-precision bound.
Load-bearing premise
Symbolic grounding in the causal generator of the world's dynamics is feasible and constitutes the sufficient condition for exact identifiability and near-infinite temporal consistency.
What would settle it
An explicit counter-example in which a statistical world model maintains bounded representation error across thousands of steps on a non-Gaussian dynamical system, or a PGSA that accumulates error beyond numerical precision in the same setting.
Figures
read the original abstract
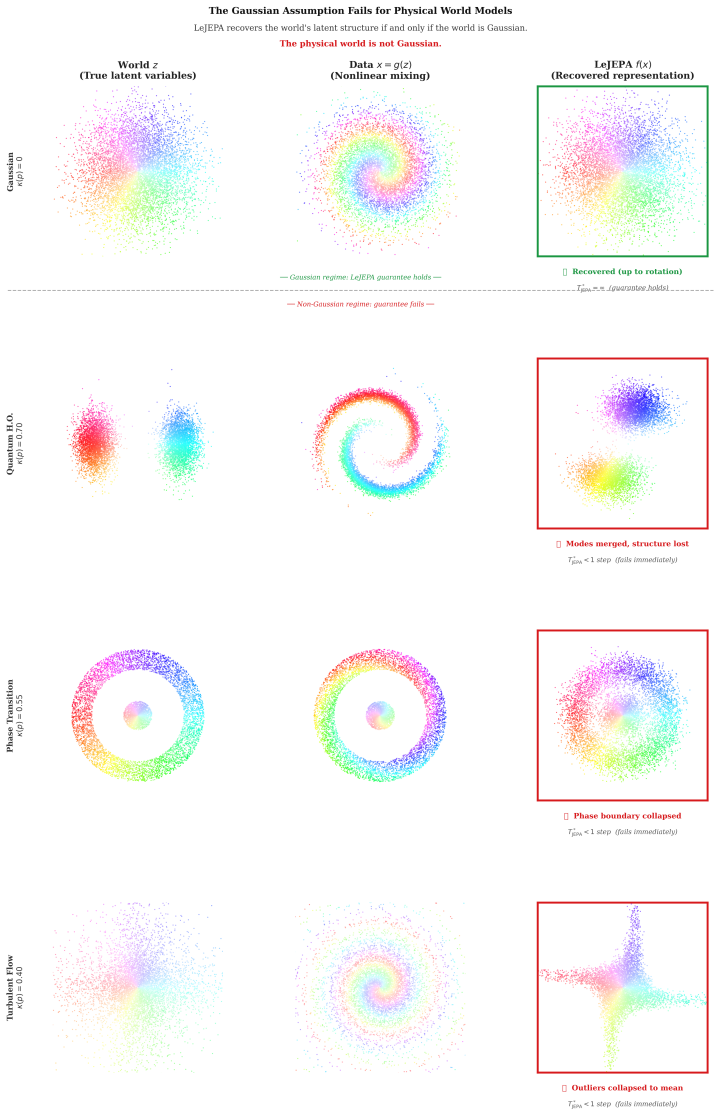
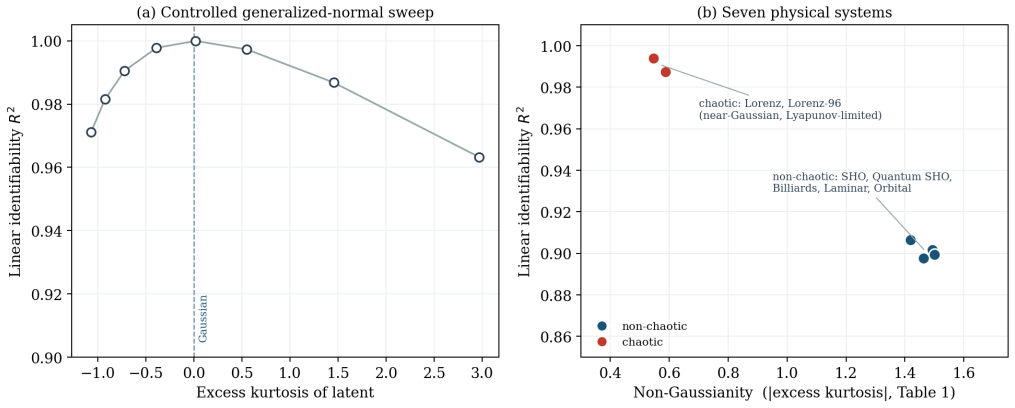
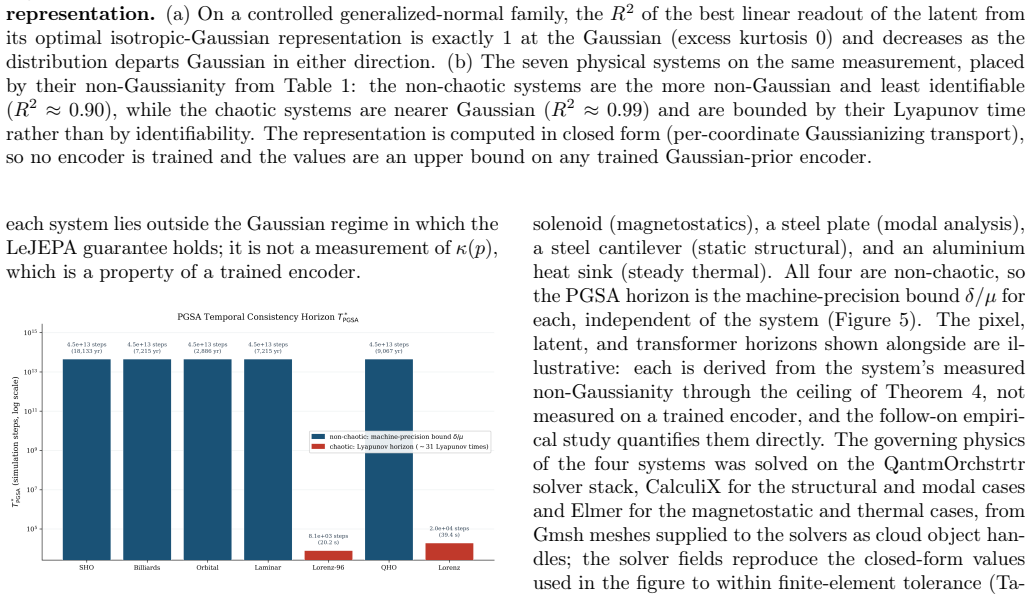
Klindt, LeCun, and Balestriero (arXiv:2605.26379) proved that Joint-Embedding Predictive Architectures (JEPAs) achieve linear identifiability, the linear recovery of the world's true latent variables, if and only if the world's latent dynamics follow a Gaussian, stationary process. This Gaussian boundary implies a fundamental limit on temporal consistency: for any non-Gaussian physical system, the representation error of a statistical World Model grows monotonically with time. We prove that this limit is an artifact of the statistical alignment mechanism, not a property of World Models in general. We introduce the Physics-Grounded Symbolic Architecture (PGSA) and prove three results: (1) a PGSA achieves exact linear identifiability for all physical regimes, regardless of the latent distribution; (2) the per-step error of a PGSA is bounded by numerical precision alone; and (3) as a direct consequence, a PGSA maintains temporal consistency for an unbounded number of transitions, a property we term near-infinite temporal consistency. We further prove that statistical World Models cannot achieve this property for any non-Gaussian system, regardless of model capacity or the volume of training data. The algebraic cores of four of the theorems are formalized in Lean 4 with Mathlib4 v4.31.0 (zero sorry placeholders); the Klindt et al. converse is taken as an external premise. The contrast establishes that symbolic grounding in the causal generator of the world's dynamics is the sufficient condition and, in non-Gaussian regimes, the only condition for near-infinite temporal consistency.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that the Gaussian-stationary restriction on linear identifiability proved by Klindt et al. for Joint-Embedding Predictive Architectures is an artifact of statistical alignment rather than an intrinsic limit on world models. It introduces the Physics-Grounded Symbolic Architecture (PGSA) and asserts three results: (1) exact linear identifiability holds for PGSA in all physical regimes independent of the latent distribution; (2) per-step representation error is bounded solely by numerical precision; and (3) this yields near-infinite temporal consistency (unbounded transitions). It further proves that no statistical world model can achieve the same property for non-Gaussian systems. The algebraic cores of four theorems are formalized in Lean 4 (Mathlib4 v4.31.0) with zero sorries, taking the Klindt converse as an external premise.
Significance. If the claims hold, the work would be significant for representation learning and world-model theory by demonstrating that symbolic grounding in the causal generator suffices for identifiability and unbounded consistency where statistical methods are provably limited. The machine-checked formalization of the algebraic steps, together with the explicit negative result for statistical models, supplies reproducible, falsifiable support that strengthens the central contrast.
minor comments (3)
- [Abstract] Abstract: the phrasing "four of the theorems" is used after enumerating three results; an explicit mapping between the three claimed properties and the four formalized theorem cores would improve clarity.
- [Abstract] Abstract: the term "near-infinite temporal consistency" is introduced without a precise statement of the bound (e.g., whether it is strictly unbounded or asymptotic in the number of transitions); a one-sentence definition would aid readers.
- [Abstract] Abstract: the statement that symbolic grounding is "the only condition" for non-Gaussian regimes is strong; a brief pointer to the precise theorem that rules out all statistical alternatives (beyond capacity or data volume) would help.
Simulated Author's Rebuttal
We thank the referee for their positive review, detailed summary of our contributions, and recommendation to accept the manuscript.
Circularity Check
No significant circularity; external premise and formalization keep derivation independent
full rationale
The paper takes the Klindt et al. (arXiv:2605.26379) converse as an explicit external premise for the Gaussian case and supplies Lean 4 formalizations (zero sorry placeholders) of the algebraic cores of its four theorems on PGSA identifiability and near-infinite temporal consistency. No step reduces a claimed prediction to a fitted input, renames a known result, imports uniqueness from the authors' own prior work, or defines a quantity in terms of the target result. The central claims rest on the symbolic grounding premise plus the external Gaussian boundary, with no self-citation load-bearing or self-definitional reduction present.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Klindt et al. (arXiv:2605.26379) result that JEPAs achieve linear identifiability iff latent dynamics are Gaussian stationary
invented entities (1)
-
Physics-Grounded Symbolic Architecture (PGSA)
no independent evidence
Forward citations
Cited by 1 Pith paper
-
The Unfireable Safety Kernel: Execution-Time AI Alignment for AI Agents and Other Escapable AI Systems
Presents the Unfireable Safety Kernel as an execution-time alignment system for escapable AI agents, with four required properties, machine-checked fail-closed behavior in Rust, and tests showing refusal of escape attempts.
Reference graph
Works this paper leans on
-
[1]
Klindt, D., LeCun, Y. & Balestriero, R. When Does LeJEPA Learn a World Model?arXiv preprint arXiv:2605.26379(2026)
Pith/arXiv arXiv 2026
-
[2]
Balestriero, R. et al. LeJEPA: Provable and Scal- able Self-Supervised Learning Without the Heuris- tics.arXiv preprint arXiv:2511.08544(2025)
Pith/arXiv arXiv 2025
-
[3]
Uhlenbeck, G. E. & Ornstein, L. S. On the The- ory of the Brownian Motion.Phys. Rev.36, 823–841 (1930). 12
1930
-
[4]
A Path Towards Autonomous Machine Intelligence.OpenReviewVersion 0.9.2 (2022)
LeCun, Y. A Path Towards Autonomous Machine Intelligence.OpenReviewVersion 0.9.2 (2022)
2022
-
[5]
Hafner, D. et al. Mastering Diverse Control Tasks through World Models.Nature(2025).https:// doi.org/10.1038/s41586-025-08744-2
-
[6]
& Karniadakis, G
Raissi, M., Perdikaris, P. & Karniadakis, G. E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.J. Comput. Phys.378, 686–707 (2019)
2019
-
[7]
& Yosinski, J
Greydanus, S., Dzamba, M. & Yosinski, J. Hamilto- nian Neural Networks. InAdvances in Neural Infor- mation Processing Systemsvol. 32 (2019)
2019
-
[8]
& Peters, J
Lutter, M., Ritter, C. & Peters, J. Deep Lagrangian Networks: Using Physics as Model Prior for Deep Neural Networks. InProc. ICLR(2019)
2019
-
[9]
Neural Ordinary Differential Equations
Chen, R.T.Q., Rubanova, Y., Bettencourt, J.&Du- venaud, D. Neural Ordinary Differential Equations. InAdvances in Neural Information Processing Sys- temsvol. 31 (2018)
2018
-
[10]
Lusch, B., Kutz, J. N. & Brunton, S. L. Deep learn- ing for universal linear embeddings of nonlinear dy- namics.Nat. Commun.9, 4950 (2018)
2018
-
[11]
Cranmer, M. et al. Discovering Symbolic Models from Deep Learning with Inductive Biases. InAd- vances in Neural Information Processing Systems vol. 33 (2020)
2020
-
[12]
P., Monti, R
Khemakhem, I., Kingma, D. P., Monti, R. P. & Hyvärinen, A. Variational Autoencoders and Nonlin- ear ICA: A Unifying Framework. InProc. AISTATS (2020)
2020
-
[13]
& Morioka, H
Hyvärinen, A. & Morioka, H. Unsupervised Feature Extraction by Time-Contrastive Learning and Non- linear ICA. InAdvances in Neural Information Pro- cessing Systemsvol. 29 (2016)
2016
-
[14]
& LeCun, Y
Bardes, A., Ponce, J. & LeCun, Y. VICReg: Variance-Invariance-Covariance Regularization for Self-Supervised Learning. InProc. ICLR(2022)
2022
-
[15]
Pearl, J.Causality: Models, Reasoning, and Infer- ence, 2nd edn (Cambridge University Press, 2009)
2009
-
[16]
Some Undecidable Problems Involv- ing Elementary Functions of a Real Variable.J
Richardson, D. Some Undecidable Problems Involv- ing Elementary Functions of a Real Variable.J. Symb. Logic33, 514–520 (1968)
1968
-
[17]
& Ruelle, D
Eckmann, J.-P. & Ruelle, D. Ergodic Theory of Chaos and Strange Attractors.Rev. Mod. Phys.57, 617–656 (1985)
1985
-
[18]
The Lean 4 Mathematical Library (Mathlib4)
The Mathlib Community. The Lean 4 Mathematical Library (Mathlib4). GitHub repository (2024). https://github.com/leanprover-community/ mathlib4
2024
-
[19]
IEEE Standard for Floating-Point Arithmetic.IEEE Std 754-2019(2019). 13
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.