EgoEngine: From Egocentric Human Videos to High-Fidelity Dexterous Robot Demonstrations
Pith reviewed 2026-06-27 09:26 UTC · model grok-4.3
The pith
EgoEngine converts egocentric human manipulation videos into high-fidelity robot videos and action trajectories, allowing zero-shot visuomotor policy learning on real robots without any real-robot demonstrations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
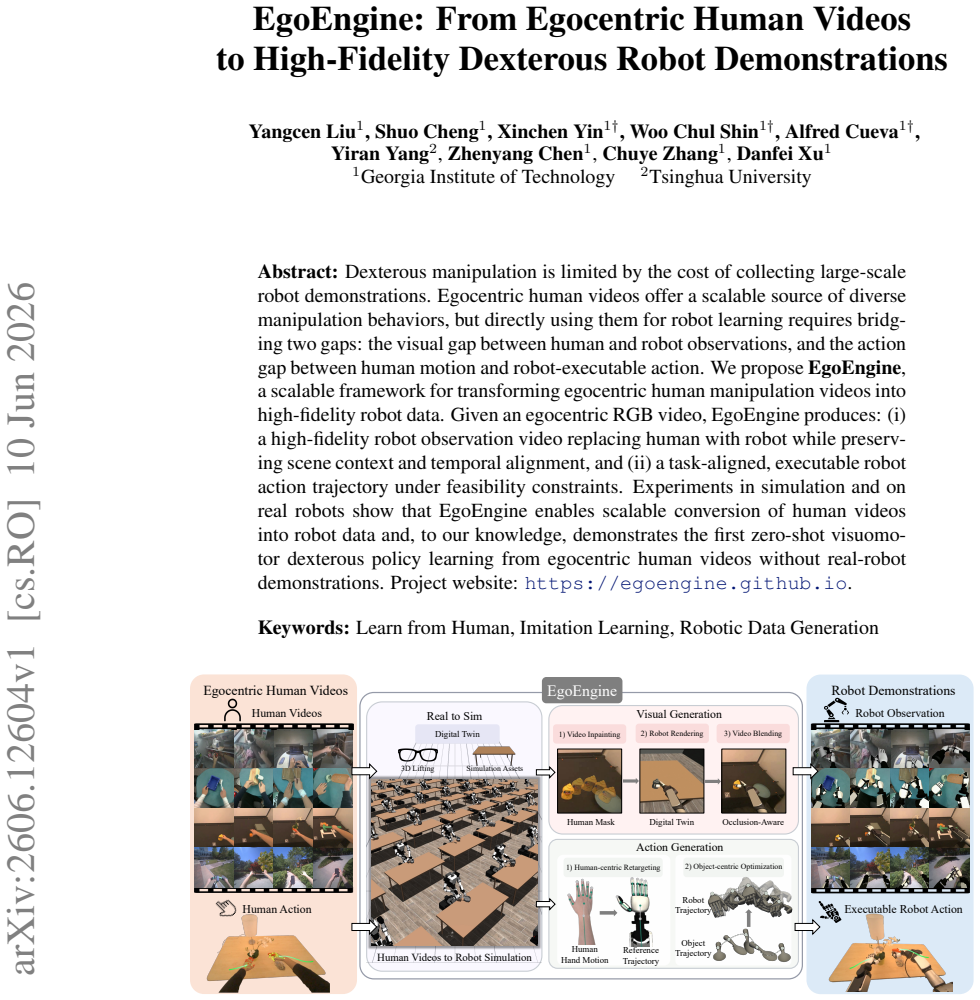
Given an egocentric RGB video, EgoEngine produces a high-fidelity robot observation video that replaces the human with a robot while preserving scene context and temporal alignment, together with a task-aligned, executable robot action trajectory under feasibility constraints. Experiments in simulation and on real robots demonstrate that policies trained exclusively on this generated data transfer successfully, constituting the first reported zero-shot visuomotor dexterous policy learning from egocentric human videos without real-robot demonstrations.
What carries the argument
EgoEngine, the framework that generates robot observation videos and feasible action trajectories from egocentric human videos.
Load-bearing premise
The robot videos and action trajectories produced from human videos are accurate and physically feasible enough that policies trained only on them succeed when deployed on real robots.
What would settle it
Train a policy on EgoEngine-generated data for a given task and observe that it fails on the real robot, while an otherwise identical policy trained on real-robot demonstrations for the same task succeeds.
Figures

read the original abstract
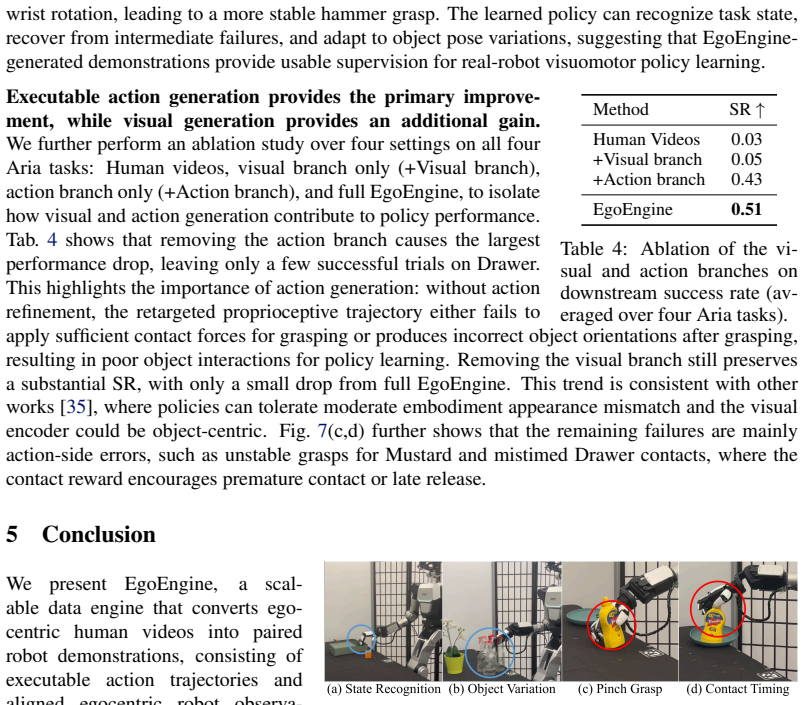
Dexterous manipulation is limited by the cost of collecting large-scale robot demonstrations. Egocentric human videos offer a scalable source of diverse manipulation behaviors, but directly using them for robot learning requires bridging two gaps: the visual gap between human and robot observations, and the action gap between human motion and robot-executable action. We propose EgoEngine, a scalable framework for transforming egocentric human manipulation videos into high-fidelity robot data. Given an egocentric RGB video, EgoEngine produces: (i) a high-fidelity robot observation video replacing human with robot while preserving scene context and temporal alignment, and (ii) a task-aligned, executable robot action trajectory under feasibility constraints. Experiments in simulation and on real robots show that EgoEngine enables scalable conversion of human videos into robot data and, to our knowledge, demonstrates the first zero-shot visuomotor dexterous policy learning from egocentric human videos without real-robot demonstrations. Project website: https://egoengine.github.io.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes EgoEngine, a scalable framework that takes an egocentric RGB human manipulation video as input and outputs (i) a high-fidelity robot observation video in which the human is replaced by a robot while preserving scene context and temporal alignment, and (ii) a task-aligned, executable robot action trajectory subject to feasibility constraints. The central claim is that policies trained exclusively on the resulting synthetic robot data achieve zero-shot visuomotor dexterous manipulation on real robots, constituting the first such demonstration without any real-robot demonstrations; supporting experiments are stated to have been performed in simulation and on physical hardware.
Significance. If the zero-shot transfer result holds with the reported fidelity and without hidden real-robot data, the work would materially advance scalable dexterous manipulation learning by converting abundant egocentric human video into robot-executable data, directly addressing the data-collection bottleneck highlighted in the abstract.
major comments (1)
- [Abstract] Abstract: the claim that EgoEngine 'demonstrates the first zero-shot visuomotor dexterous policy learning from egocentric human videos without real-robot demonstrations' is load-bearing for the entire contribution, yet the provided text contains no quantitative results (success rates, number of trials, comparison to real-demonstration baselines, or ablations on generation fidelity). Without these data it is impossible to verify that the generated trajectories are distributionally close enough for real-robot transfer, which is the weakest assumption identified in the stress-test note.
Simulated Author's Rebuttal
We thank the referee for highlighting the need for quantitative support in the abstract for our central claim. We address this point directly below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that EgoEngine 'demonstrates the first zero-shot visuomotor dexterous policy learning from egocentric human videos without real-robot demonstrations' is load-bearing for the entire contribution, yet the provided text contains no quantitative results (success rates, number of trials, comparison to real-demonstration baselines, or ablations on generation fidelity). Without these data it is impossible to verify that the generated trajectories are distributionally close enough for real-robot transfer, which is the weakest assumption identified in the stress-test note.
Authors: We agree that the abstract should include key quantitative results to make the zero-shot transfer claim verifiable at a glance. The full manuscript reports these metrics in the experiments section (e.g., real-robot success rates across multiple tasks and trials, with comparisons to real-demonstration baselines). We will revise the abstract to incorporate representative numbers such as average success rate, number of trials, and a brief note on fidelity ablations. revision: yes
Circularity Check
No significant circularity
full rationale
The paper presents EgoEngine as a framework that converts egocentric human videos into robot observations and action trajectories, with the central claim supported by experiments in simulation and on real robots rather than by any internal derivation, fitted parameters renamed as predictions, or self-citation chains. No equations, ansatzes, or uniqueness theorems are referenced in the abstract or description that reduce outputs to inputs by construction. The result is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
Human-as-Humanoid: Enabling Zero-Shot Humanoid Learning from Ego-Exo Human Videos with Human-Aligned Embodiments
Human-as-Humanoid converts ego-exo human videos into executable 60-DoF humanoid actions through embodiment alignment and retargeting, enabling zero-shot real-robot policy deployment without target-task teleoperation data.
Reference graph
Works this paper leans on
-
[1]
O’Neill, A
A. O’Neill, A. Rehman, A. Maddukuri, A. Gupta, A. Padalkar, A. Lee, A. Pooley, A. Gupta, A. Mandlekar, A. Jain, et al. Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 6892–6903. IEEE, 2024
2024
-
[2]
A. Khazatsky, K. Pertsch, S. Nair, A. Balakrishna, S. Dasari, S. Karamcheti, S. Nasiriany, M. K. Srirama, L. Y . Chen, K. Ellis, et al. Droid: A large-scale in-the-wild robot manipulation dataset.arXiv preprint arXiv:2403.12945, 2024
Pith/arXiv arXiv 2024
-
[3]
Z.-H. Yin, C. Wang, L. Pineda, F. Hogan, K. Bodduluri, A. Sharma, P. Lancaster, I. Prasad, M. Kalakrishnan, J. Malik, M. Lambeta, T. Wu, P. Abbeel, and M. Mukadam. Dexterity- gen: Foundation controller for unprecedented dexterity, 2025. URLhttps://arxiv. org/abs/2502.04307
arXiv 2025
-
[4]
M. Xu, H. Zhang, Y . Hou, Z. Xu, L. Fan, M. Veloso, and S. Song. Dexumi: Using hu- man hand as the universal manipulation interface for dexterous manipulation.arXiv preprint arXiv:2505.21864, 2025
arXiv 2025
-
[5]
R. Punamiya, S. Kareer, Z. Liu, J. Citron, R.-Z. Qiu, X. Cai, A. Gavryushin, J. Chen, D. Li- conti, L. Y . Zhu, P. Aphiwetsa, B. Li, A. Cheluva, P. Kuppili, Y . Liu, D. Patel, A. Gao, H.-Y . Chung, R. Co, R. Zbizika, J. Liu, X. Xu, H. Xiong, G. Chen, S. Oliani, C. Yang, X. Wang, J. Fort, R. Newcombe, J. Gao, J. Chong, G. Matsuda, A. Doriwala, M. Polle- fe...
Pith/arXiv arXiv 2026
-
[6]
Grauman, A
K. Grauman, A. Westbury, E. Byrne, Z. Chavis, A. Furnari, R. Girdhar, J. Hamburger, H. Jiang, M. Liu, X. Liu, et al. Ego4d: Around the world in 3,000 hours of egocentric video. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 18995–19012, 2022
2022
-
[7]
R. Hoque, P. Huang, D. J. Yoon, M. Sivapurapu, and J. Zhang. Egodex: Learning dexterous manipulation from large-scale egocentric video, 2026. URLhttps://arxiv.org/abs/ 2505.11709
Pith/arXiv arXiv 2026
- [8]
-
[9]
J. Engel, K. Somasundaram, M. Goesele, A. Sun, A. Gamino, A. Turner, A. Talattof, A. Yuan, B. Souti, B. Meredith, C. Peng, C. Sweeney, C. Wilson, D. Barnes, D. DeTone, D. Caruso, D. Valleroy, D. Ginjupalli, D. Frost, E. Miller, E. Mueggler, E. Oleinik, F. Zhang, G. Soma- sundaram, G. Solaira, H. Lanaras, H. Howard-Jenkins, H. Tang, H. J. Kim, J. Rivera, J...
Pith/arXiv arXiv 2023
- [10]
-
[11]
J. Shi, Z. Zhao, T. Wang, I. Pedroza, A. Luo, J. Wang, J. Ma, and D. Jayaraman. Zeromimic: Distilling robotic manipulation skills from web videos.arXiv preprint arXiv:2503.23877, 2025
arXiv 2025
-
[12]
Y . Liu, W. C. Shin, Y . Han, Z. Chen, H. Ravichandar, and D. Xu. Immimic: Cross-domain imitation from human videos via mapping and interpolation, 2025. URLhttps://arxiv. org/abs/2509.10952
arXiv 2025
-
[13]
R. Punamiya, D. Patel, P. Aphiwetsa, P. Kuppili, L. Y . Zhu, S. Kareer, J. Hoffman, and D. Xu. Egobridge: Domain adaptation for generalizable imitation from egocentric human data, 2025. URLhttps://arxiv.org/abs/2509.19626
arXiv 2025
-
[14]
L. Y . Zhu, P. Kuppili, R. Punamiya, P. Aphiwetsa, D. Patel, S. Kareer, S. Ha, and D. Xu. Emma: Scaling mobile manipulation via egocentric human data, 2025. URLhttps:// arxiv.org/abs/2509.04443
arXiv 2025
-
[15]
C. Wang, L. Fan, J. Sun, R. Zhang, L. Fei-Fei, D. Xu, Y . Zhu, and A. Anandkumar. Mimicplay: Long-horizon imitation learning by watching human play, 2023. URLhttps://arxiv. org/abs/2302.12422
arXiv 2023
-
[16]
V . Liu, A. Adeniji, H. Zhan, R. Bhirangi, P. Abbeel, and L. Pinto. Egozero: Robot learning from smart glasses.arXiv preprint arXiv:2505.20290, 2025
arXiv 2025
-
[17]
Lepert, J
M. Lepert, J. Fang, and J. Bohg. Phantom: Training robots without robots using only human videos. InConference on Robot Learning (CoRL), Seoul, Korea, 2025
2025
-
[18]
Y . Qin, W. Yang, B. Huang, K. Van Wyk, H. Su, X. Wang, Y .-W. Chao, and D. Fox. Anyteleop: A general vision-based dexterous robot arm-hand teleoperation system. InRobotics: Science and Systems, 2023
2023
-
[19]
C. Kong, Y . Cho, W. Jung, I. Wibowo, P. Shinde, S. Vinodh-Sangeetha, L. K. Chung, Z. Chen, A. Mattei, A. Nidumukkala, A. Elias, D. Xu, T. Higgins, and S. Kousik. A closed- form geometric retargeting solver for upper body humanoid robot teleoperation, 2026. URL https://arxiv.org/abs/2602.01632
arXiv 2026
- [20]
-
[21]
Z.-H. Yin, C. Wang, L. Pineda, K. Bodduluri, T. Wu, P. Abbeel, and M. Mukadam. Geometric retargeting: A principled, ultrafast neural hand retargeting algorithm, 2025. URLhttps: //arxiv.org/abs/2503.07541
arXiv 2025
-
[22]
R.-Z. Qiu, S. Yang, X. Cheng, C. Chawla, J. Li, T. He, G. Yan, D. J. Yoon, R. Hoque, L. Paulsen, G. Yang, J. Zhang, S. Yi, G. Shi, and X. Wang. Humanoid policy human policy,
-
[23]
URLhttps://arxiv.org/abs/2503.13441
-
[24]
J. Yin, H. Qi, Y . Wi, S. Kundu, M. Lambeta, W. Yang, C. Wang, T. Wu, J. Malik, and T. Helle- brekers. Osmo: Open-source tactile glove for human-to-robot skill transfer, 2025. URL https://arxiv.org/abs/2512.08920
arXiv 2025
- [25]
-
[26]
J. Mu, S. Yang, Y . Bao, H. Bae, T. Wei, L. Xu, B. Li, H. Xu, and J. Pang. Deximit: Learning bimanual dexterous manipulation from monocular human videos, 2026. URLhttps:// arxiv.org/abs/2602.10105
arXiv 2026
-
[27]
W. Wan, J. Fu, X. Yuan, Y . Zhu, and H. Su. Lodestar: Long-horizon dexterity via synthetic data augmentation from human demonstrations, 2025. URLhttps://arxiv.org/abs/ 2508.17547
arXiv 2025
-
[28]
S. Zhao, X. Zhu, Y . Chen, C. Li, X. Zhang, M. Ding, and M. Tomizuka. Dexh2r: Task-oriented dexterous manipulation from human to robots.arXiv preprint arXiv:2411.04428, 2024
arXiv 2024
-
[29]
T. Lin, K. Sachdev, L. Fan, J. Malik, and Y . Zhu. Sim-to-real reinforcement learning for vision-based dexterous manipulation on humanoids, 2025. URLhttps://arxiv.org/ abs/2502.20396
arXiv 2025
- [30]
-
[31]
T. G. W. Lum, O. Y . Lee, C. K. Liu, and J. Bohg. Crossing the human-robot embodiment gap with sim-to-real rl using one human demonstration.arXiv preprint arXiv:2504.12609, 2025
arXiv 2025
-
[32]
Z. Gu, Y . Chen, Z. Chai, A. Cueva, T. Nguyen, Y . Wu, H. Xue, M. Kim, I. Legene, F. Liu, M. Kim, A. Barula, Y . Chen, and Y . Zhao. Refine-dp: Diffusion policy fine-tuning for hu- manoid loco-manipulation via reinforcement learning, 2026. URLhttps://arxiv.org/ abs/2603.13707
arXiv 2026
-
[33]
C. Pan, C. Wang, H. Qi, Z. Liu, H. Bharadhwaj, A. Sharma, T. Wu, G. Shi, J. Malik, and F. Hogan. Spider: Scalable physics-informed dexterous retargeting, 2026. URLhttps: //arxiv.org/abs/2511.09484
arXiv 2026
-
[34]
L. Yang, X. Huang, Z. Wu, A. Kanazawa, P. Abbeel, C. Sferrazza, C. K. Liu, R. Duan, and G. Shi. Omniretarget: Interaction-preserving data generation for humanoid whole-body loco-manipulation and scene interaction, 2025. URLhttps://arxiv.org/abs/2509. 26633
2025
-
[35]
Lepert, J
M. Lepert, J. Fang, and J. Bohg. Masquerade: Learning from in-the-wild human videos using data-editing. In2026 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2026
2026
-
[36]
C. Yuan, R. Zhou, M. Liu, Y . Hu, S. Wang, L. Yi, C. Wen, S. Zhang, and Y . Gao. Motiontrans: Human vr data enable motion-level learning for robotic manipulation policies, 2025. URL https://arxiv.org/abs/2509.17759
arXiv 2025
-
[37]
G. Li, Y . Lyu, Z. Liu, C. Hou, Y . Xu, J. Zhang, and S. Zhang. H2r: A human-to-robot data augmentation for robot pre-training from videos.arXiv preprint arXiv:2505.11920, 2025
arXiv 2025
-
[38]
T. Xu, Z. Chen, L. Wu, H. Lu, Y . Chen, L. Jiang, B. Liu, and Y . Chen. Motion dreamer: Realizing physically coherent video generation through scene-aware motion reasoning.arXiv preprint arXiv:2412.00547, 2024
arXiv 2024
-
[39]
D. Geng, C. Herrmann, J. Hur, F. Cole, S. Zhang, T. Pfaff, T. Lopez-Guevara, C. Doersch, Y . Aytar, M. Rubinstein, et al. Motion prompting: Controlling video generation with motion trajectories.arXiv preprint arXiv:2412.02700, 2024
arXiv 2024
-
[40]
Zhang, H.-X
T. Zhang, H.-X. Yu, R. Wu, B. Y . Feng, C. Zheng, N. Snavely, J. Wu, and W. T. Freeman. Physdreamer: Physics-based interaction with 3d objects via video generation. InEuropean Conference on Computer Vision, pages 388–406. Springer, 2024
2024
- [41]
-
[42]
P. Yang, H. Ci, Y . Song, and M. Z. Shou. X-humanoid: Robotize human videos to generate humanoid videos at scale, 2025. URLhttps://arxiv.org/abs/2512.04537
arXiv 2025
-
[43]
Z. Jiang, Z. Han, C. Mao, J. Zhang, Y . Pan, and Y . Liu. Vace: All-in-one video creation and editing, 2025. URLhttps://arxiv.org/abs/2503.07598
Pith/arXiv arXiv 2025
-
[44]
S. Patel, S. Mohan, H. Mai, U. Jain, S. Lazebnik, and Y . Li. Robotic manipulation by imitat- ing generated videos without physical demonstrations, 2025. URLhttps://arxiv.org/ abs/2507.00990
Pith/arXiv arXiv 2025
-
[45]
T. Tao, M. K. Srirama, J. J. Liu, K. Shaw, and D. Pathak. Dexwild: Dexterous human in- teractions for in-the-wild robot policies, 2025. URLhttps://arxiv.org/abs/2505. 07813
2025
-
[46]
R. Yang, Q. Yu, Y . Wu, R. Yan, B. Li, A.-C. Cheng, X. Zou, Y . Fang, X. Cheng, R.-Z. Qiu, H. Yin, S. Liu, S. Han, Y . Lu, and X. Wang. Egovla: Learning vision-language-action models from egocentric human videos, 2025. URLhttps://arxiv.org/abs/2507.12440
Pith/arXiv arXiv 2025
-
[47]
B. Wen, M. Trepte, J. Aribido, J. Kautz, O. Gallo, and S. Birchfield. Foundationstereo: Zero- shot stereo matching, 2025. URLhttps://arxiv.org/abs/2501.09898
arXiv 2025
-
[48]
N. Ravi, V . Gabeur, Y .-T. Hu, R. Hu, C. Ryali, T. Ma, H. Khedr, R. R ¨adle, C. Rolland, L. Gustafson, E. Mintun, J. Pan, K. V . Alwala, N. Carion, C.-Y . Wu, R. Girshick, P. Doll ´ar, and C. Feichtenhofer. SAM 2: Segment anything in images and videos. InInternational Conference on Learning Representations (ICLR), 2025
2025
-
[49]
B. Wen, W. Yang, J. Kautz, and S. Birchfield. Foundationpose: Unified 6d pose estimation and tracking of novel objects. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 17868–17879, 2024
2024
-
[50]
K. Zakka. Mink: Python inverse kinematics based on MuJoCo, Feb. 2026. URLhttps: //github.com/kevinzakka/mink
2026
-
[51]
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov. Proximal policy optimization algorithms, 2017. URLhttps://arxiv.org/abs/1707.06347
Pith/arXiv arXiv 2017
-
[52]
C. Schwarke, M. Mittal, N. Rudin, D. Hoeller, and M. Hutter. Rsl-rl: A learning library for robotics research, 2025. URLhttps://arxiv.org/abs/2509.10771
arXiv 2025
- [53]
-
[54]
Y . Chen, C. Wang, L. Fei-Fei, and C. K. Liu. Sequential dexterity: Chaining dexterous policies for long-horizon manipulation, 2023. URLhttps://arxiv.org/abs/2309.00987
arXiv 2023
-
[55]
T. He, Z. Wang, H. Xue, Q. Ben, Z. Luo, W. Xiao, Y . Yuan, X. Da, F. Casta ˜neda, S. Sastry, C. Liu, G. Shi, L. Fan, and Y . Zhu. Viral: Visual sim-to-real at scale for humanoid loco- manipulation, 2025. URLhttps://arxiv.org/abs/2511.15200
arXiv 2025
-
[56]
Y . J. Ma, W. Liang, G. Wang, D.-A. Huang, O. Bastani, D. Jayaraman, Y . Zhu, L. Fan, and A. Anandkumar. Eureka: Human-level reward design via coding large language models, 2024. URLhttps://arxiv.org/abs/2310.12931
Pith/arXiv arXiv 2024
-
[57]
P. Yin, T. Westenbroek, Z. Zhang, J. Tran, I. Dagnino, E. Shilamkar, N. Mbiziwo-Tiapo, S. Bagaria, X. Liu, G. Mullins, A. Kolobov, and A. Gupta. Emergent dexterity via diverse resets and large-scale reinforcement learning, 2026. URLhttps://arxiv.org/abs/ 2603.15789
arXiv 2026
-
[58]
S. Cheng and D. Xu. League: Guided skill learning and abstraction for long-horizon manipu- lation, 2023. URLhttps://arxiv.org/abs/2210.12631
arXiv 2023
-
[59]
T. Yu, R. Feng, R. Feng, J. Liu, X. Jin, W. Zeng, and Z. Chen. Inpaint anything: Segment anything meets image inpainting, 2023. URLhttps://arxiv.org/abs/2304.06790
arXiv 2023
-
[60]
L. Wang, X. Chen, J. Zhao, and K. He. Scaling proprioceptive-visual learning with heteroge- neous pre-trained transformers, 2024. URLhttps://arxiv.org/abs/2409.20537
arXiv 2024
-
[61]
Y . Liu, H. Yang, X. Si, L. Liu, Z. Li, Y . Zhang, Y . Liu, and L. Yi. Taco: Benchmarking generalizable bimanual tool-action-object understanding.arXiv preprint arXiv:2401.08399, 2024
arXiv 2024
-
[62]
E. Parzen. On estimation of a probability density function and mode.The annals of mathemat- ical statistics, 33(3):1065–1076, 1962
1962
-
[63]
T. Wan, A. Wang, B. Ai, B. Wen, C. Mao, C.-W. Xie, D. Chen, F. Yu, H. Zhao, J. Yang, J. Zeng, J. Wang, J. Zhang, J. Zhou, J. Wang, J. Chen, K. Zhu, K. Zhao, K. Yan, L. Huang, M. Feng, N. Zhang, P. Li, P. Wu, R. Chu, R. Feng, S. Zhang, S. Sun, T. Fang, T. Wang, T. Gui, T. Weng, T. Shen, W. Lin, W. Wang, W. Wang, W. Zhou, W. Wang, W. Shen, W. Yu, X. Shi, X....
Pith/arXiv arXiv 2025
-
[64]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. InPro- ceedings of the IEEE conference on computer vision and pattern recognition (CVPR), pages 770–778, 2016
2016
-
[65]
Simonyan and A
K. Simonyan and A. Zisserman. Very deep convolutional networks for large-scale image recog- nition. InInternational Conference on Learning Representations (ICLR), 2015
2015
-
[66]
Oquab, T
M. Oquab, T. Darcet, T. Moutakanni, H. V o, M. Szafraniec, V . Khalidov, P. Fernandez, D. Haz- iza, F. Massa, A. El-Nouby, et al. DINOv2: Learning robust visual features without supervi- sion.Transactions on Machine Learning Research (TMLR), 2024
2024
-
[67]
S. D. Team, X. Chen, F.-J. Chu, P. Gleize, K. J. Liang, A. Sax, H. Tang, W. Wang, M. Guo, T. Hardin, X. Li, A. Lin, J. Liu, Z. Ma, A. Sagar, B. Song, X. Wang, J. Yang, B. Zhang, P. Doll´ar, G. Gkioxari, M. Feiszli, and J. Malik. Sam 3d: 3dfy anything in images, 2025. URL https://arxiv.org/abs/2511.16624
Pith/arXiv arXiv 2025
-
[68]
Balasubramanian, Sivakumar and Melendez-Calderon, Alejandro and Roby-Brami, Agnes and Burdet, Etienne. On the analysis of movement smoothness.Journal of NeuroEngineering and Rehabilitation, 12(1):112, 2015. doi:10.1186/s12984-015-0090-9. URLhttps://doi. org/10.1186/s12984-015-0090-9. Appendix A Hardware and Data Preprocess The overall data collection and ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.