Optimal Control of Incompressible Ideal Flows with Obstacle Avoidance
Pith reviewed 2026-05-24 06:14 UTC · model grok-4.3
The pith
Introducing a barrier potential into the optimal control of incompressible ideal flows produces modified Euler equations with a shifted effective pressure.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
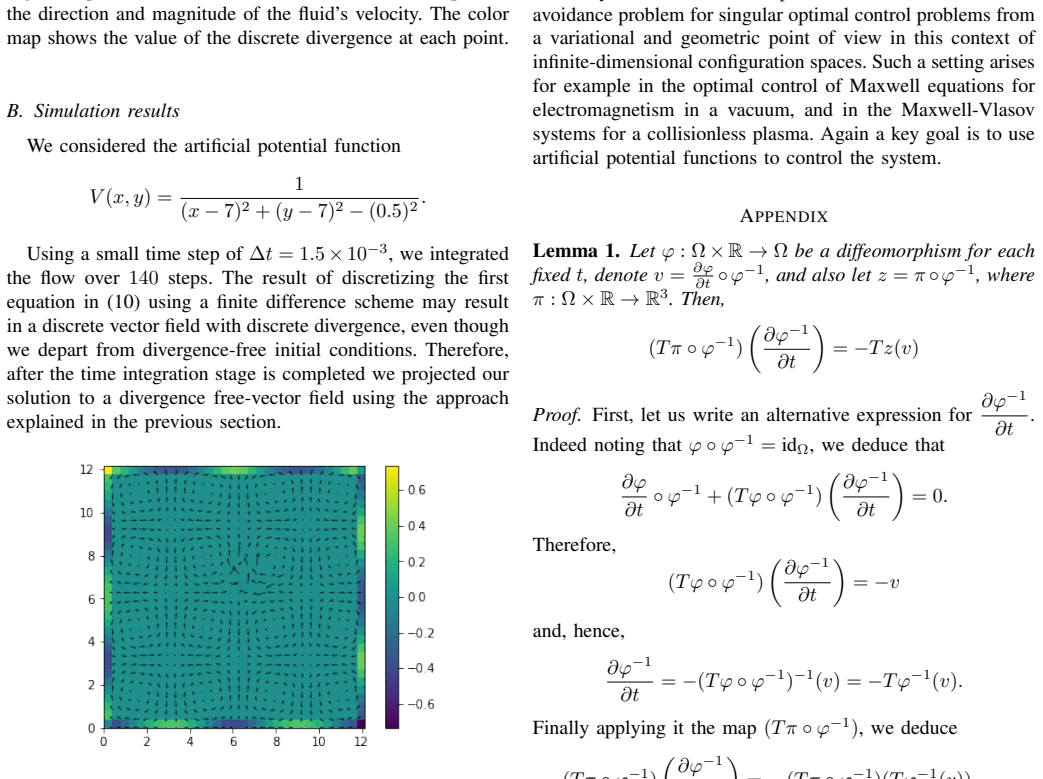
By incorporating a barrier-type potential into the optimal control functional, the authors derive modified Euler equations for an inviscid incompressible fluid. The barrier term influences the Lagrangian configuration and appears in the Eulerian description as a shift in the effective pressure. Numerical simulations illustrate that this induces a localized deformation of the flow near the obstacle region.
What carries the argument
The barrier-type potential added to the optimal control functional, which penalizes proximity to obstacles and shifts the pressure in the Eulerian equations.
If this is right
- The flow remains incompressible and inviscid, with only the pressure modified by the barrier.
- The variational structure is preserved, yielding Euler-type equations with the pressure shift.
- Numerical reduced Eulerian dynamics show localized deformation near the obstacle consistent with avoidance penalization.
- The method extends the link between optimal control and fluid dynamics to include obstacle constraints.
Where Pith is reading between the lines
- If the pressure shift works in simulations, it could be tested in physical experiments with controlled flows around barriers.
- This approach might generalize to other constraints in fluid optimal control problems.
- Connections to other variational methods in fluid mechanics could be explored for similar modifications.
Load-bearing premise
The barrier-type potential can be added to the optimal control functional while preserving the variational structure that yields Euler-type equations, with only a change in the pressure.
What would settle it
A direct computation or simulation showing whether the effective pressure in the modified equations exactly matches the barrier term's contribution from the Lagrangian side would confirm or refute the shift.
Figures

read the original abstract
It was shown in \cite{bloch2000optimal} that an optimal control formulation for incompressible ideal fluid flow yields Euler's equations. In this paper, we consider a variational obstacle-avoidance formulation for incompressible ideal flows by introducing a barrier-type potential in the associated optimal control functional. This leads to \textit{modified Euler equations for an inviscid fluid}, in which the barrier term acts on the Lagrangian configuration and appears in the Eulerian description as a shift in the effective pressure. We also present a numerical illustration of the reduced Eulerian dynamics, showing that the barrier term induces a localized deformation of the flow near the obstacle region, consistent with its role as an obstacle-avoidance penalization.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript extends the optimal control formulation of Bloch et al. (2000) for incompressible ideal fluid flow by adding a barrier-type potential to the functional to enforce obstacle avoidance. This yields modified Euler equations for an inviscid fluid in which the barrier acts on the Lagrangian configuration and appears in the Eulerian description as a shift in the effective pressure. A numerical illustration of the reduced Eulerian dynamics is presented, demonstrating localized deformation of the flow near the obstacle.
Significance. If the derivation holds, the result supplies a variational mechanism for incorporating configuration-dependent obstacle avoidance into ideal incompressible flow control while preserving the Euler-Poincaré structure; the pressure-shift effect follows directly from the conservative nature of the added potential under the divergence-free constraint. This framework is potentially useful for geometric control problems in fluids. The numerical example provides concrete support for the theoretical claim.
minor comments (2)
- [Abstract] The abstract states that the barrier term 'appears in the Eulerian description as a shift in the effective pressure' but does not display the explicit modified equation; adding the precise form (even if derived later) would improve immediate readability.
- The numerical illustration is described only qualitatively ('localized deformation'); a brief statement of the discretization scheme, domain, or quantitative measure of the pressure shift would strengthen the supporting evidence without altering the central claim.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript and for recommending acceptance. The recognition that the barrier potential preserves the Euler-Poincaré structure while inducing a pressure shift is particularly appreciated.
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper cites bloch2000optimal solely to establish the base fact that an optimal-control formulation on volume-preserving diffeomorphisms yields the standard Euler equations. It then introduces a configuration-dependent barrier potential into the control functional and applies standard first-variation arguments; the resulting body force is absorbed into the pressure under the divergence-free constraint, producing a modified Euler equation whose form follows directly from the variational structure without any fitted parameters, self-referential definitions, or load-bearing self-citations. No equation or claim reduces to its own inputs by construction, and the cited prior result is an independent external reference rather than an unverified uniqueness theorem supplied by the present authors.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
modified Euler equation: ∂v/∂t + v·∇v = −∇(p−V), div v=0 (Theorem 2)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
barrier-type potential in the associated optimal control functional
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
An optimal control formulation for inviscid incompressible ideal fluid flow,
A. M. Bloch, D. D. Holm, P. E. Crouch, and J. E. Marsden, “An optimal control formulation for inviscid incompressible ideal fluid flow,” in Proceedings of the 39th IEEE Conference on Decision and Control (Cat. No. 00CH37187) , vol. 2. IEEE, 2000, pp. 1273–1278
work page 2000
-
[2]
V . Arnold, “Sur la géométrie différentielle des groupes de lie de dimension infinie et ses applications à l’hydrodynamique des fluides parfaits,” in Annales de l’institut Fourier, vol. 16, no. 1, 1966, pp. 319– 361
work page 1966
-
[3]
Coadjoint orbits, vortices, and clebsch variables for incompressible fluids,
J. Marsden and A. Weinstein, “Coadjoint orbits, vortices, and clebsch variables for incompressible fluids,” Physica D: Nonlinear Phenomena , vol. 7, no. 1-3, pp. 305–323, 1983
work page 1983
-
[4]
Groups of diffeomorphisms and the solution of the classical euler equations for a perfect fluid,
D. G. Ebin and J. E. Marsden, “Groups of diffeomorphisms and the solution of the classical euler equations for a perfect fluid,” 1969
work page 1969
-
[5]
Semidirect products and reduction in mechanics,
J. E. Marsden, T. Ra¸ tiu, and A. Weinstein, “Semidirect products and reduction in mechanics,” Transactions of the american mathematical society, vol. 281, no. 1, pp. 147–177, 1984
work page 1984
-
[6]
Euler’s fluid equations: Optimal control vs optimization,
D. D. Holm, “Euler’s fluid equations: Optimal control vs optimization,” Physics Letters A , vol. 373, no. 47, pp. 4354–4359, 2009
work page 2009
-
[7]
Optimal control and geodesic flows,
A. M. Bloch and P. E. Crouch, “Optimal control and geodesic flows,” Systems & control letters , vol. 28, no. 2, pp. 65–72, 1996
work page 1996
-
[8]
Double bracket equations and geodesic flows on symmetric spaces,
A. M. Bloch, R. W. Brockett, and P. E. Crouch, “Double bracket equations and geodesic flows on symmetric spaces,” Communications in mathematical physics , vol. 187, pp. 357–373, 1997
work page 1997
-
[9]
Discrete rigid body dynamics and optimal control,
A. M. Bloch, P. E. Crouch, J. E. Marsden, and T. S. Ratiu, “Discrete rigid body dynamics and optimal control,” in Proceedings of the 37th IEEE Conference on Decision and Control (Cat. No. 98CH36171) , vol. 2. IEEE, 1998, pp. 2249–2254
work page 1998
-
[10]
Variational obstacle avoidance on riemannian manifolds,
A. Bloch, M. Camarinha, and L. J. Colombo, “Variational obstacle avoidance on riemannian manifolds,” Proceedings of the 2017 IEEE International Conference on Decision and Control , pp. 146–150, 2017
work page 2017
-
[11]
Dynamic interpolation for obstacle avoidance on riemannian manifolds,
——, “Dynamic interpolation for obstacle avoidance on riemannian manifolds,” International Journal of Control , vol. 94, no. 3, pp. 588– 600, 2021
work page 2021
-
[12]
Variational collision avoidance problems on riemannian manifolds,
M. Assif, R. Banavar, A. Bloch, M. Camarinha, and L. J. Colombo, “Variational collision avoidance problems on riemannian manifolds,” Proceedings of the 2018 IEEE International Conference on Decision and Control, pp. 2791–2796, 2018
work page 2018
-
[13]
Variational collision and obstacle avoidance of multi-agent systems on riemannian manifolds,
R. Chandrasekaran, L. J. Colombo, M. Camarinha, R. Banavar, and A. Bloch, “Variational collision and obstacle avoidance of multi-agent systems on riemannian manifolds,” Proceedings of the 2020 European Control Conference, 2020
work page 2020
-
[14]
Variational point-obstacle avoidance on riemannian manifolds,
A. Bloch, M. Camarinha, and L. J. Colombo, “Variational point-obstacle avoidance on riemannian manifolds,” Mathematics of Control, Signals, and Systems, vol. 33, pp. 109–121, 2021
work page 2021
-
[15]
The euler–poincaré equa- tions and semidirect products with applications to continuum theories,
D. D. Holm, J. E. Marsden, and T. S. Ratiu, “The euler–poincaré equa- tions and semidirect products with applications to continuum theories,” Advances in Mathematics , vol. 137, no. 1, pp. 1–81, 1998
work page 1998
-
[16]
Brand, Vector and tensor analysis
L. Brand, Vector and tensor analysis. Courier Dover Publications, 2020
work page 2020
-
[17]
J. E. Marsden, A. J. Tromba, A. Weinstein et al. , Basic multivariable calculus. Springer, 1993
work page 1993
-
[18]
Geometric dynamics of optimization,
F. Gay-Balmaz, D. Holm, and T. Ratiu, “Geometric dynamics of optimization,”Communications in Mathematical Sciences, vol. 11, no. 1, pp. 163–231, 2013
work page 2013
-
[19]
R. Abraham and J. E. Marsden, Foundations of mechanics. American Mathematical Soc., 2008, no. 364
work page 2008
-
[20]
R. Abraham, J. E. Marsden, and T. Ratiu, Manifolds, tensor analysis, and applications. Springer Science & Business Media, 2012, vol. 75
work page 2012
-
[21]
Real-time obstacle avoidance for manipulators and mobile robots,
O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,” The international journal of robotics research, vol. 5, no. 1, pp. 90–98, 1986
work page 1986
-
[22]
Robot planning and control via potential functions,
D. E. Koditschek, “Robot planning and control via potential functions,” The robotics review, p. 349, 1989
work page 1989
-
[23]
A. J. Chorin and J. E. Marsden, A Mathematical Introduction to Fluid Mechanics, 2nd ed., ser. Texts in Applied Mathematics. Springer New York, NY , 1990, originally published in the series: Universitext. [Online]. Available: https://doi.org/10.1007/978-1-4684-0364-0
-
[24]
The helmholtz- hodge decomposition—a survey,
H. Bhatia, G. Norgard, V . Pascucci, and P.-T. Bremer, “The helmholtz- hodge decomposition—a survey,” IEEE Transactions on Visualization and Computer Graphics , vol. 19, no. 8, pp. 1386–1404, 2013
work page 2013
-
[25]
Structure-preserving discretization of incompressible fluids,
D. Pavlov, P. Mullen, Y . Tong, E. Kanso, J. Marsden, and M. Desbrun, “Structure-preserving discretization of incompressible fluids,” Physica D: Nonlinear Phenomena , vol. 240, no. 6, pp. 443–458, 2011. [Online]. Available: https://www.sciencedirect.com/science/article/pii/ S0167278910002873
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.