Multi-Source Human-in-the-Loop Digital Twin Testbed for Connected and Autonomous Vehicles in Mixed Traffic Flow
Pith reviewed 2026-05-21 10:50 UTC · model grok-4.3
The pith
MSH-MCCT testbed enables real-time coexistence of physical and virtual vehicles with human drivers in mixed traffic.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MSH-MCCT integrates physical, virtual, and mixed platforms with multi-source control inputs; bridged by the mixed platform, it allows human drivers and CAV algorithms to operate both physical and virtual vehicles within multiple fields of view, thereby facilitating the coexistence and real-time interaction of physical and virtual CAVs and HDVs to enhance experimental flexibility and scalability.
What carries the argument
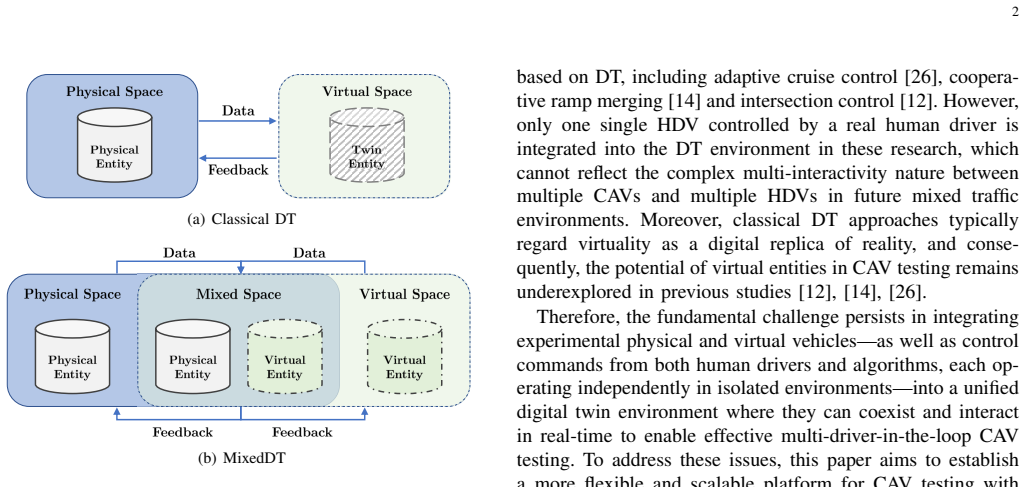
The Mixed Digital Twin concept that merges Mixed Reality with Digital Twin to connect physical vehicles, virtual models, and human control inputs across platforms.
If this is right
- Vehicle platooning tests can run with multiple real human drivers simultaneously through driving simulators of varying fidelity.
- CAV control algorithms can interact with both physical and virtual human-driven vehicles in the same experiment.
- Real-time multi-view interactions become possible without needing every vehicle to be physically present.
- Overall testing throughput rises because virtual vehicles can be added or removed without changing the physical setup.
Where Pith is reading between the lines
- If the bridging holds, researchers could run high-volume safety tests at lower cost by shifting more traffic into the virtual layer.
- The same architecture might extend to other domains such as pedestrian or cyclist interactions with autonomous systems.
- Larger-scale experiments could combine the testbed with city-level traffic models to study emergent flow patterns.
Load-bearing premise
The mixed platform accurately captures real-world mixed traffic dynamics so that interactions between human drivers and CAV algorithms stay representative when some vehicles are physical and others are virtual.
What would settle it
If side-by-side comparisons show that driver responses or vehicle spacing in the testbed differ markedly from the same maneuvers recorded on actual roads, the claim that the system produces representative mixed-traffic behavior would be refuted.
Figures











read the original abstract
In the emerging mixed traffic environments, Connected and Autonomous Vehicles (CAVs) have to interact with surrounding human-driven vehicles (HDVs). This paper introduces MSH-MCCT (Multi-Source Human-in-the-Loop Mixed Cloud Control Testbed), a novel CAV testbed that captures complex interactions between various CAVs and HDVs. Utilizing the Mixed Digital Twin concept, which combines Mixed Reality with Digital Twin, MSH-MCCT integrates physical, virtual, and mixed platforms, along with multi-source control inputs. Bridged by the mixed platform, MSH-MCCT allows human drivers and CAV algorithms to operate both physical and virtual vehicles within multiple fields of view. Particularly, this testbed facilitates the coexistence and real-time interaction of physical and virtual CAVs \& HDVs, significantly enhancing the experimental flexibility and scalability. Experiments on vehicle platooning in mixed traffic showcase the potential of MSH-MCCT to conduct CAV testing with multi-source real human drivers in the loop through driving simulators of diverse fidelity. The videos for the experiments are available at our project website: https://dongjh20.github.io/MSH-MCCT.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces MSH-MCCT, a Multi-Source Human-in-the-Loop Mixed Cloud Control Testbed for CAVs in mixed traffic. It integrates physical, virtual, and mixed platforms via the Mixed Digital Twin concept to enable real-time coexistence and interaction between physical and virtual CAVs and HDVs, with multi-source human inputs from driving simulators of varying fidelity. The central demonstration consists of qualitative platooning experiments intended to showcase enhanced experimental flexibility and scalability.
Significance. If the mixed-platform bridging produces interaction dynamics statistically representative of real-world mixed traffic, the testbed could offer a practical route to scalable human-in-the-loop validation of CAV algorithms without requiring large physical vehicle fleets, addressing a recognized bottleneck in mixed-traffic research.
major comments (2)
- [Abstract / Experiments] Abstract and Experiments section: the claim that the mixed platform 'facilitates the coexistence and real-time interaction of physical and virtual CAVs & HDVs, significantly enhancing the experimental flexibility and scalability' is load-bearing yet unsupported by quantitative evidence. No metrics (headway distributions, reaction-time statistics, platoon stability margins, or Kolmogorov-Smirnov comparisons between hybrid and baseline conditions) are reported to verify that latency, visual-field mismatches, or simulator dynamics do not introduce systematic artifacts.
- [System Architecture] System Architecture description: the assertion that the Mixed Digital Twin 'bridges' physical and virtual environments such that human-CAV interactions remain representative rests on unshown implementation details of synchronization, latency compensation, and field-of-view alignment. Without these specifics or validation data, the representativeness assumption cannot be evaluated.
minor comments (2)
- [Abstract] The project website link is provided but no supplementary material (code, configuration files, or raw data) is referenced, limiting reproducibility of the described integration.
- [System Architecture] Notation for platform components (physical, virtual, mixed) is introduced without a consistent diagram or table that maps data flows and control loops across the three platforms.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and have revised the manuscript to strengthen the presentation of the testbed's capabilities.
read point-by-point responses
-
Referee: [Abstract / Experiments] Abstract and Experiments section: the claim that the mixed platform 'facilitates the coexistence and real-time interaction of physical and virtual CAVs & HDVs, significantly enhancing the experimental flexibility and scalability' is load-bearing yet unsupported by quantitative evidence. No metrics (headway distributions, reaction-time statistics, platoon stability margins, or Kolmogorov-Smirnov comparisons between hybrid and baseline conditions) are reported to verify that latency, visual-field mismatches, or simulator dynamics do not introduce systematic artifacts.
Authors: We agree that quantitative metrics would provide stronger support for the claims of real-time interaction and scalability. The original experiments were primarily qualitative demonstrations of the testbed's flexibility with multi-source human inputs. In the revised manuscript, we have added latency measurements, average headway statistics, and platoon stability margins from the platooning trials to the Experiments section. These indicate that hybrid interactions remain comparable to expected mixed-traffic behavior. Full statistical comparisons such as Kolmogorov-Smirnov tests against purely physical baselines are not included, as they would require additional controlled experiments beyond the current scope. revision: partial
-
Referee: [System Architecture] System Architecture description: the assertion that the Mixed Digital Twin 'bridges' physical and virtual environments such that human-CAV interactions remain representative rests on unshown implementation details of synchronization, latency compensation, and field-of-view alignment. Without these specifics or validation data, the representativeness assumption cannot be evaluated.
Authors: We have expanded the System Architecture section with a dedicated subsection detailing the synchronization protocol (time-stamped UDP messaging with NTP alignment), latency compensation via predictive state buffering, and field-of-view alignment using calibrated extrinsic parameters between physical cameras and virtual renders. We also include supplementary timing logs and latency histograms from the mixed-platform runs to support the bridging mechanism. revision: yes
Circularity Check
No circularity in testbed system description
full rationale
The manuscript is a descriptive engineering paper introducing the MSH-MCCT testbed architecture. It details integration of physical, virtual, and mixed platforms plus multi-source inputs without any equations, derivations, fitted parameters, or predictions. Claims about coexistence, real-time interaction, and enhanced flexibility are direct consequences of the enumerated system components rather than reductions to self-definitions or self-citations. No load-bearing steps match the enumerated circularity patterns; the work is self-contained against external benchmarks as a platform presentation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Mixed reality integration can produce real-time interactions between physical and virtual vehicles that are sufficiently realistic for CAV algorithm testing.
invented entities (1)
-
MSH-MCCT testbed
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
MSH-MCCT integrates physical, virtual, and mixed platforms... Experiments on vehicle platooning in mixed traffic showcase the potential of MSH-MCCT to conduct CAV testing with multi-source real human drivers in the loop through driving simulators of diverse fidelity.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
H. Ding, S. Wang, Y . Cao, X. Fu, H. Fu, Q. Yuan, and T. Chen, “What patterns contribute to autonomous vehicle crashes? a study of level 2 and 4 automation via association rule analysis,”Journal of Intelligent and Connected Vehicles, vol. 8, no. 3, pp. 9 210 065–1, 2025
work page 2025
-
[2]
J. Dong, J. Wang, M. Cai, Y . Yang, Q. Xu, J. Wang, and K. Li, “Stfc: Spatio-temporal formation control for connected and autonomous vehi- cles in multi-lane traffic,”Communications in Transportation Research, vol. 5, p. 100219, 2025
work page 2025
-
[3]
J. Shi, Y . Luo, P. Li, J. Wang, and K. Li, “Collaborative multi-lane on-ramp merging strategy for connected and automated vehicles using dynamic conflict graph,”Journal of Intelligent and Connected Vehicles, vol. 7, no. 1, pp. 38–51, 2024
work page 2024
-
[4]
Dense reinforcement learning for safety validation of autonomous vehicles,
S. Feng, H. Sun, X. Yan, H. Zhu, Z. Zou, S. Shen, and H. X. Liu, “Dense reinforcement learning for safety validation of autonomous vehicles,” Nature, vol. 615, no. 7953, pp. 620–627, 2023
work page 2023
-
[5]
S. Feng, X. Yan, H. Sun, Y . Feng, and H. X. Liu, “Intelligent driving in- telligence test for autonomous vehicles with naturalistic and adversarial environment,”Nature communications, vol. 12, no. 1, p. 748, 2021
work page 2021
-
[6]
Y . Zhou, C. Cui, J. Peng, Z. Yang, J. Lu, J. Panchal, B. Yao, and Z. Wang, “A hierarchical test platform for vision language model (vlm)-integrated real-world autonomous driving,”ACM Transactions on Internet of Things, 2025
work page 2025
-
[7]
J. Wang, Y . Zheng, Q. Xu, J. Wang, and K. Li, “Controllability analysis and optimal control of mixed traffic flow with human-driven and autonomous vehicles,”IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 12, pp. 7445–7459, 2021
work page 2021
-
[8]
Smoothing traffic flow via control of autonomous vehicles,
Y . Zheng, J. Wang, and K. Li, “Smoothing traffic flow via control of autonomous vehicles,”IEEE Internet of Things Journal, vol. 7, no. 5, pp. 3882–3896, 2020
work page 2020
-
[9]
A discussion on the com- plexity and transit mechanisms of urban traffic systems,
Z. Gao, B. Jia, D. Xie, W. Wang, and J. Wu, “A discussion on the com- plexity and transit mechanisms of urban traffic systems,”Engineering, vol. 44, pp. 24–29, 2025
work page 2025
-
[10]
J. Wang, Y . Zheng, J. Dong, C. Chen, M. Cai, K. Li, and Q. Xu, “Imple- mentation and experimental validation of data-driven predictive control for dissipating stop-and-go waves in mixed traffic,”IEEE Internet of Things Journal, 2023
work page 2023
-
[11]
Effects of connected and au- tonomous vehicle merging behavior on mainline human-driven vehicle,
L. Yue, M. Abdel-Aty, and Z. Wang, “Effects of connected and au- tonomous vehicle merging behavior on mainline human-driven vehicle,” Journal of Intelligent and Connected Vehicles, vol. 5, no. 3, pp. 36–45, 2022
work page 2022
-
[12]
Digital twin-assisted cooperative driving at non-signalized intersections,
Z. Wang, K. Han, and P. Tiwari, “Digital twin-assisted cooperative driving at non-signalized intersections,”IEEE Transactions on Intelligent Vehicles, 2021
work page 2021
-
[13]
C. Maag, D. Muhlbacher, C. Mark, and H.-P. Kruger, “Studying effects of advanced driver assistance systems (adas) on individual and group level using multi-driver simulation,”IEEE Intelligent Transportation Systems Magazine, vol. 4, no. 3, pp. 45–54, 2012
work page 2012
-
[14]
X. Liao, Z. Wang, X. Zhao, K. Han, P. Tiwari, M. J. Barth, and G. Wu, “Cooperative ramp merging design and field implementation: A digital twin approach based on vehicle-to-cloud communication,”IEEE Transactions on Intelligent Transportation Systems, 2021
work page 2021
-
[15]
C. Chen, J. Wang, Q. Xu, J. Wang, and K. Li, “Mixed platoon control of automated and human-driven vehicles at a signalized intersection: dynamical analysis and optimal control,”Transportation Research Part C: Emerging Technologies, vol. 127, p. 103138, 2021
work page 2021
-
[16]
Flow: A modular learning framework for mixed autonomy traffic,
C. Wu, A. R. Kreidieh, K. Parvate, E. Vinitsky, and A. M. Bayen, “Flow: A modular learning framework for mixed autonomy traffic,” IEEE Transactions on Robotics, vol. 38, no. 2, pp. 1270–1286, 2021
work page 2021
-
[17]
Make space to change lane: A cooperative adaptive cruise control lane change controller,
H. Wang, J. Lai, X. Zhang, Y . Zhou, S. Li, and J. Hu, “Make space to change lane: A cooperative adaptive cruise control lane change controller,”Transportation research part C: emerging technologies, vol. 143, p. 103847, 2022
work page 2022
-
[18]
Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity,
A. Kesting, M. Treiber, and D. Helbing, “Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity,” Philosophical Transactions of the Royal Society A: Mathematical, Phys- ical and Engineering Sciences, vol. 368, no. 1928, pp. 4585–4605, 2010
work page 1928
-
[19]
A model for the structure of lane-changing decisions,
P. G. Gipps, “A model for the structure of lane-changing decisions,” Transportation Research Part B: Methodological, vol. 20, no. 5, pp. 403–414, 1986
work page 1986
-
[20]
A multiagent social interaction model for autonomous vehicle testing,
S. Wang, Y . Ni, C. Miao, J. Sun, and J. Sun, “A multiagent social interaction model for autonomous vehicle testing,”Communications in Transportation Research, vol. 5, p. 100183, 2025
work page 2025
-
[21]
H. Hao, Y . Wang, and J. Chen, “Empowering scenario planning with artificial intelligence: A perspective on building smart and resilient cities,”Engineering, vol. 43, pp. 272–283, 2024
work page 2024
-
[22]
Can language models be used for real-world urban-delivery route optimization?
Y . Liu, F. Wu, Z. Liu, K. Wang, F. Wang, and X. Qu, “Can language models be used for real-world urban-delivery route optimization?”The Innovation, vol. 4, no. 6, p. 100520, 2023
work page 2023
-
[23]
Driver digital twin for online recognition of distracted driving behaviors,
Y . Ma, R. Du, A. Abdelraouf, K. Han, R. Gupta, and Z. Wang, “Driver digital twin for online recognition of distracted driving behaviors,”IEEE Transactions on Intelligent Vehicles, 2024
work page 2024
-
[24]
J. Warner, D. S. Hurwitz, C. M. Monsere, and K. Fleskes, “A simulator- based analysis of engineering treatments for right-hook bicycle crashes at signalized intersections,”Accident Analysis & Prevention, vol. 104, pp. 46–57, 2017
work page 2017
-
[25]
A coupled driving simulator to investigate the interaction between bicycles and automated vehicles,
J. Lindner, A. Keler, G. Grigoropoulos, P. Malcolm, F. Denk, P. Brunner, and K. Bogenberger, “A coupled driving simulator to investigate the interaction between bicycles and automated vehicles,” in2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2022, pp. 1335–1341
work page 2022
-
[26]
Digital twin simulation of connected and automated vehicles with the unity game engine,
Z. Wang, K. Han, and P. Tiwari, “Digital twin simulation of connected and automated vehicles with the unity game engine,” in2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI). IEEE, 2021, pp. 1–4
work page 2021
-
[27]
CARLA: An open urban driving simulator,
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V . Koltun, “CARLA: An open urban driving simulator,” inProceedings of the 1st Annual Conference on Robot Learning, 2017, pp. 1–16
work page 2017
-
[28]
Networked driving simulation: Applications, state of the art, and design considerations,
K. Abdelgawad, J. Gausemeier, R. Dumitrescu, M. Grafe, J. St ¨ocklein, and J. Berssenbr ¨ugge, “Networked driving simulation: Applications, state of the art, and design considerations,”Designs, vol. 1, no. 1, p. 4, 2017
work page 2017
-
[29]
J. Swake, M. Jannat, M. Islam, and D. Hurwitz, “Driver response to phase termination at signalized intersections: are driving simulator results valid,” in7th International Driving Symposium on Human Factors in Driving Assessment, Training, and Vehicle Design, Bolton Landing, NY, 2013
work page 2013
-
[30]
Z. Wang, O. Zheng, L. Li, M. Abdel-Aty, C. Cruz-Neira, and Z. Islam, “Towards next generation of pedestrian and connected vehicle in-the- loop research: A digital twin co-simulation framework,”IEEE Transac- tions on Intelligent Vehicles, 2023
work page 2023
-
[31]
Z. Hu, S. Lou, Y . Xing, X. Wang, D. Cao, and C. Lv, “Review and perspectives on driver digital twin and its enabling technologies for intelligent vehicles,”IEEE Transactions on Intelligent Vehicles, 2022. 15
work page 2022
-
[32]
Driver behavior modeling towards au- tonomous vehicles: Comprehensive review,
N. M. Negash and J. Yang, “Driver behavior modeling towards au- tonomous vehicles: Comprehensive review,”IEEE Access, 2023
work page 2023
-
[33]
Mixed cloud control testbed: Validating vehicle-road-cloud integration via mixed digital twin,
J. Dong, Q. Xu, J. Wang, C. Yang, M. Cai, C. Chen, Y . Liu, J. Wang, and K. Li, “Mixed cloud control testbed: Validating vehicle-road-cloud integration via mixed digital twin,”IEEE Transactions on Intelligent Vehicles, vol. 8, no. 4, pp. 2723–2736, 2023
work page 2023
-
[34]
The digital twin paradigm for future nasa and us air force vehicles,
E. Glaessgen and D. Stargel, “The digital twin paradigm for future nasa and us air force vehicles,” in53rd AIAA/ASME/ASCE/AHS/ASC structures, structural dynamics and materials conference 20th AIAA/ASME/AHS adaptive structures conference 14th AIAA, 2012, p. 1818
work page 2012
-
[35]
Parallel transportation systems: Toward iot-enabled smart urban traffic control and management,
F. Zhu, Y . Lv, Y . Chen, X. Wang, G. Xiong, and F.-Y . Wang, “Parallel transportation systems: Toward iot-enabled smart urban traffic control and management,”IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 10, pp. 4063–4071, 2019
work page 2019
-
[36]
Critical roles of control engineering in the development of intelligent and connected vehicles,
Y . Fei, P. Shi, Y . Liu, and L. Wang, “Critical roles of control engineering in the development of intelligent and connected vehicles,”Journal of Intelligent and Connected Vehicles, vol. 7, no. 2, pp. 79–85, 2024
work page 2024
-
[37]
Digital twin platform for real-time data communication in uav environment,
C. Bae, E. Choi, S. Kang, S. Ahn, and S. Lee, “Digital twin platform for real-time data communication in uav environment,”Future Generation Computer Systems, p. 108078, 2025
work page 2025
-
[38]
Digital twin: manufacturing excellence through virtual factory replication,
M. Grieves, “Digital twin: manufacturing excellence through virtual factory replication,”White paper, vol. 1, pp. 1–7, 2014
work page 2014
-
[39]
Mobility digital twin: Concept, architecture, case study, and future challenges,
Z. Wang, R. Gupta, K. Han, H. Wang, A. Ganlath, N. Ammar, and P. Tiwari, “Mobility digital twin: Concept, architecture, case study, and future challenges,”IEEE Internet of Things Journal, 2022
work page 2022
-
[40]
P. Y . Zhou, J. Zhu, Y . Wang, Y . Lu, Z. Wei, H. Shi, Y . Ding, Y . Gao, Q. Huang, Y . Shiet al., “Vetaverse: Technologies, applications, and visions toward the intersection of metaverse, ai, vehicles, and trans- portation systems,”IEEE Transactions on Artificial Intelligence, 2025
work page 2025
-
[41]
Parallel driving in cpss: A unified approach for transport automation and vehicle intelligence,
F.-Y . Wang, N.-N. Zheng, D. Cao, C. M. Martinez, L. Li, and T. Liu, “Parallel driving in cpss: A unified approach for transport automation and vehicle intelligence,”IEEE/CAA Journal of Automatica Sinica, vol. 4, no. 4, pp. 577–587, 2017
work page 2017
-
[42]
Digital twin: Mitigating unpredictable, un- desirable emergent behavior in complex systems,
M. Grieves and J. Vickers, “Digital twin: Mitigating unpredictable, un- desirable emergent behavior in complex systems,” inTransdisciplinary perspectives on complex systems. Springer, 2017, pp. 85–113
work page 2017
-
[43]
W. Chu, Q. Wuniri, X. Du, Q. Xiong, T. Huang, and K. Li, “Cloud control system architectures, technologies and applications on intelligent and connected vehicles: a review,”Chinese Journal of Mechanical Engineering, vol. 34, no. 1, pp. 1–23, 2021
work page 2021
-
[44]
A review on mixed reality: Current trends, challenges and prospects,
S. Rokhsaritalemi, A. Sadeghi-Niaraki, and S.-M. Choi, “A review on mixed reality: Current trends, challenges and prospects,”Applied Sciences, vol. 10, no. 2, p. 636, 2020
work page 2020
-
[45]
The impact of virtual, augmented and mixed reality technologies on the customer experience,
C. Flavi ´an, S. Ib ´a˜nez-S´anchez, and C. Or ´us, “The impact of virtual, augmented and mixed reality technologies on the customer experience,” Journal of business research, vol. 100, pp. 547–560, 2019
work page 2019
-
[46]
Digital twin in virtual reality for human-vehicle interactions in the context of autonomous driving,
S. M. Serrano, R. Izquierdo, I. G. Daza, M. ´A. Sotelo, and D. F. Llorca, “Digital twin in virtual reality for human-vehicle interactions in the context of autonomous driving,”arXiv preprint arXiv:2303.11463, 2023
-
[47]
Safety assessment of highly automated driving systems in test tracks: A new framework,
S. Feng, Y . Feng, X. Yan, S. Shen, S. Xu, and H. X. Liu, “Safety assessment of highly automated driving systems in test tracks: A new framework,”Accident Analysis & Prevention, vol. 144, p. 105664, 2020
work page 2020
-
[49]
Ids 3d city: A digital scaled smart city,
——, “Ids 3d city: A digital scaled smart city,”arXiv preprint arXiv:2109.02811, 2021
-
[50]
M. Armbrust, A. Fox, R. Griffith, A. D. Joseph, R. Katz, A. Konwinski, G. Lee, D. Patterson, A. Rabkin, I. Stoicaet al., “A view of cloud computing,”Communications of the ACM, vol. 53, no. 4, pp. 50–58, 2010
work page 2010
-
[51]
Microscopic traffic simulation using sumo,
P. A. Lopez, M. Behrisch, L. Bieker-Walz, J. Erdmann, Y .-P. Fl ¨otter¨od, R. Hilbrich, L. L ¨ucken, J. Rummel, P. Wagner, and E. Wiessner, “Microscopic traffic simulation using sumo,” in2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018, pp. 2575–2582
work page 2018
-
[52]
Choose your simulator wisely: A review on open-source simulators for autonomous driving,
Y . Li, W. Yuan, S. Zhang, W. Yan, Q. Shen, C. Wang, and M. Yang, “Choose your simulator wisely: A review on open-source simulators for autonomous driving,”IEEE Transactions on Intelligent Vehicles, vol. 9, no. 5, pp. 4861–4876, 2024
work page 2024
-
[53]
Development of advanced driver assistance systems with vehicle hardware-in-the-loop simulations,
O. Gietelink, J. Ploeg, B. De Schutter, and M. Verhaegen, “Development of advanced driver assistance systems with vehicle hardware-in-the-loop simulations,”Vehicle System Dynamics, vol. 44, no. 7, pp. 569–590, 2006
work page 2006
-
[54]
System and experiments of model-driven motion planning and control for autonomous vehicles,
S. Xu, R. Zidek, Z. Cao, P. Lu, X. Wang, B. Li, and H. Peng, “System and experiments of model-driven motion planning and control for autonomous vehicles,”IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021
work page 2021
-
[55]
Learning naturalistic driving environment with statistical realism,
X. Yan, Z. Zou, S. Feng, H. Zhu, H. Sun, and H. X. Liu, “Learning naturalistic driving environment with statistical realism,”Nature com- munications, vol. 14, no. 1, p. 2037, 2023
work page 2037
-
[56]
DeeP-LCC: Data-enabled pre- dictive leading cruise control in mixed traffic flow,
J. Wang, Y . Zheng, K. Li, and Q. Xu, “DeeP-LCC: Data-enabled pre- dictive leading cruise control in mixed traffic flow,”IEEE Transactions on Control Systems Technology, vol. 31, no. 6, pp. 2760–2776, 2023
work page 2023
-
[57]
Devel- opment of a small-scale research platform for intelligent transportation systems,
H. M. La, R. S. Lim, J. Du, S. Zhang, G. Yan, and W. Sheng, “Devel- opment of a small-scale research platform for intelligent transportation systems,”IEEE Transactions on Intelligent Transportation Systems, vol. 13, no. 4, pp. 1753–1762, 2012
work page 2012
-
[58]
High speed emulation in a vehicle-in- the-loop driving simulator,
E. Weiss and J. C. Gerdes, “High speed emulation in a vehicle-in- the-loop driving simulator,”IEEE Transactions on Intelligent Vehicles, vol. 8, no. 2, pp. 1826–1836, 2022
work page 2022
-
[59]
Go-chart: A miniature remotely accessi- ble self-driving car robot,
S. Kannapiran and S. Berman, “Go-chart: A miniature remotely accessi- ble self-driving car robot,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 2265–2272
work page 2020
-
[60]
Benefits and challenges of multi-driver simulator studies,
K. Oeltze and C. Schießl, “Benefits and challenges of multi-driver simulator studies,”IET intelligent transport systems, vol. 9, no. 6, pp. 618–625, 2015
work page 2015
-
[61]
Augmented reality-based advanced driver-assistance system for connected vehicles,
Z. Wang, K. Han, and P. Tiwari, “Augmented reality-based advanced driver-assistance system for connected vehicles,” in2020 IEEE Interna- tional Conference on Systems, Man, and Cybernetics (SMC). IEEE, 2020, pp. 752–759
work page 2020
-
[62]
Digital twin in industry: State-of-the-art,
F. Tao, H. Zhang, A. Liu, and A. Y . Nee, “Digital twin in industry: State-of-the-art,”IEEE Transactions on Industrial Informatics, vol. 15, no. 4, pp. 2405–2415, 2018
work page 2018
-
[63]
Cooperative adaptive cruise control in real traffic situations,
V . Milan ´es, S. E. Shladover, J. Spring, C. Nowakowski, H. Kawazoe, and M. Nakamura, “Cooperative adaptive cruise control in real traffic situations,”IEEE Transactions on intelligent transportation systems, vol. 15, no. 1, pp. 296–305, 2013
work page 2013
-
[64]
B. Chalaki, L. E. Beaver, A. I. Mahbub, H. Bang, and A. A. Ma- likopoulos, “A research and educational robotic testbed for real-time control of emerging mobility systems: From theory to scaled experiments [applications of control],”IEEE Control Systems Magazine, vol. 42, no. 6, pp. 20–34, 2022
work page 2022
-
[65]
Vision- cloud data fusion for adas: A lane change prediction case study,
Y . Liu, Z. Wang, K. Han, Z. Shou, P. Tiwari, and J. H. Hansen, “Vision- cloud data fusion for adas: A lane change prediction case study,”IEEE Transactions on Intelligent Vehicles, vol. 7, no. 2, pp. 210–220, 2021
work page 2021
-
[66]
Z. Xu, Y . Fang, N. Zheng, and H. L. Vu, “Analyzing the inconsistency in driving patterns between manual and autonomous modes under complex driving scenarios with a vr-enabled simulation platform,”Journal of intelligent and connected vehicles, vol. 5, no. 3, pp. 215–234, 2022
work page 2022
-
[67]
Rajamani,Vehicle dynamics and control
R. Rajamani,Vehicle dynamics and control. Springer Science & Business Media, 2011
work page 2011
-
[68]
J. Wang, Y . Zheng, C. Chen, Q. Xu, and K. Li, “Leading cruise control in mixed traffic flow: System modeling, controllability, and string stability,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 8, pp. 12 861–12 876, 2022
work page 2022
-
[69]
Formation control with lane preference for connected and automated vehicles in multi-lane scenarios,
M. Cai, Q. Xu, C. Chen, J. Wang, K. Li, J. Wang, and X. Wu, “Formation control with lane preference for connected and automated vehicles in multi-lane scenarios,”Transportation Research Part C: Emerging Technologies, vol. 136, p. 103513, 2022
work page 2022
-
[70]
Lane- level navigation based eco-approach,
J. Hu, M. Lei, H. Wang, M. Wang, C. Ding, and Z. Zhang, “Lane- level navigation based eco-approach,”IEEE Transactions on Intelligent Vehicles, 2023
work page 2023
-
[71]
Q. Lu, H. Jung, and K.-D. Kim, “Optimization-based approach for resilient connected and autonomous intersection crossing traffic control under v2x communication,”IEEE Transactions on Intelligent Vehicles, vol. 7, no. 2, pp. 354–367, 2021
work page 2021
-
[72]
Q. Xu, X. Chang, J. Wang, C. Chen, M. Cai, J. Wang, K. Li, and D. Cao, “Cloud-based connected vehicle control under time-varying delay: Stability analysis and controller synthesis,”IEEE Transactions on Vehicular Technology, vol. 72, no. 11, pp. 14 074–14 086, 2023
work page 2023
-
[73]
Autorally: An open platform for aggressive autonomous driving,
B. Goldfain, P. Drews, C. You, M. Barulic, O. Velev, P. Tsiotras, and J. M. Rehg, “Autorally: An open platform for aggressive autonomous driving,”IEEE Control Systems Magazine, vol. 39, no. 1, pp. 26–55, 2019
work page 2019
-
[74]
M. Treiber and A. Kesting, “Traffic flow dynamics,”Traffic Flow Dynamics: Data, Models and Simulation, Springer-Verlag Berlin Hei- delberg, 2013
work page 2013
-
[75]
S. Li, C. Chen, H. Zheng, J. Wang, Q. Xu, J. Wang, and K. Li, “Mixed platoon control under noise and attacks: Robust data-driven predictive control and human-in-the-loop validation,”IEEE Transactions on Intelligent Transportation Systems, 2025. 16
work page 2025
-
[76]
Robust explicit data-driven predictive control for mixed vehicle platoons,
S. Li, J. Zhou, J. Wang, K. Yang, Q. Xu, J. Wang, and K. Li, “Robust explicit data-driven predictive control for mixed vehicle platoons,”IEEE Internet of Things Journal, 2025
work page 2025
-
[77]
N. H. Amer, H. Zamzuri, K. Hudha, and Z. A. Kadir, “Modelling and control strategies in path tracking control for autonomous ground vehicles: a review of state of the art and challenges,”J. Intell. Rob. Syst., vol. 86, no. 2, pp. 225–254, 2017
work page 2017
-
[78]
Z. Wang, D. Sun, M. Zhao, L. Wang, and S. Cheng, “Connected autonomous vehicle control strategy for mandatory lane-changing at intersection: A cyber-physical system perspective,”IEEE Transactions on Intelligent Vehicles, 2023
work page 2023
-
[79]
E. Q. Wu, M. Zhou, P. Xiong, Z.-R. Tang, R. Hu, and Y .-W. Jie, “In- ferring flight performance under different maneuvers with pilot’s multi- physiological parameters,”IEEE Transactions on Intelligent Transporta- tion Systems, vol. 23, no. 8, pp. 11 338–11 348, 2021
work page 2021
-
[80]
Behavioral adaptations of human drivers interacting with automated vehicles,
S. Soni, N. Reddy, A. Tsapi, B. van Arem, and H. Farah, “Behavioral adaptations of human drivers interacting with automated vehicles,” Transportation research part F: traffic psychology and behaviour, vol. 86, pp. 48–64, 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.