CmIVTP: Cross-modal Interaction-based Vessel Trajectory Prediction for Maritime Intelligence
Pith reviewed 2026-06-29 18:54 UTC · model grok-4.3
The pith
A cross-modal transformer fuses AIS motion data with CCTV scene features to generate more accurate and feasible vessel trajectories.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
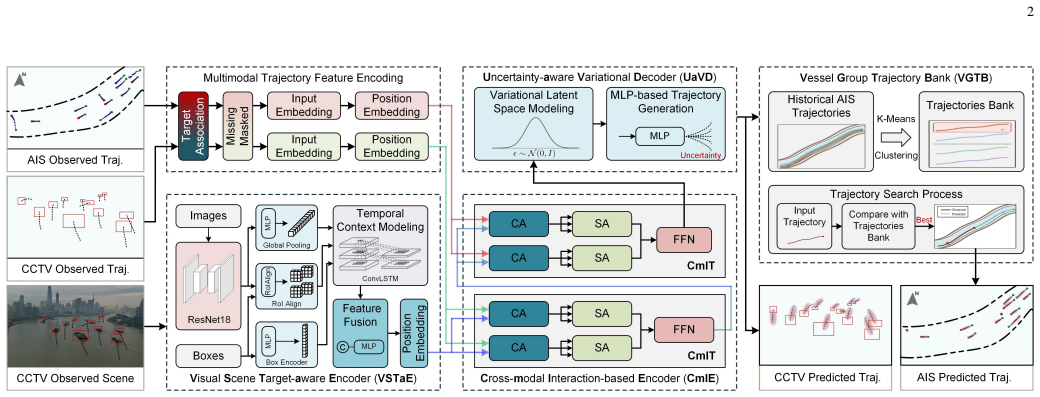
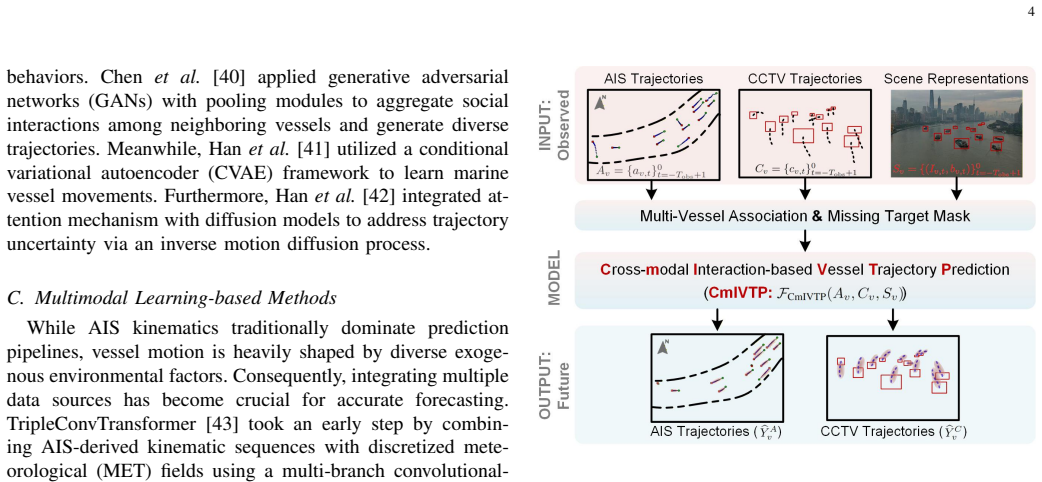
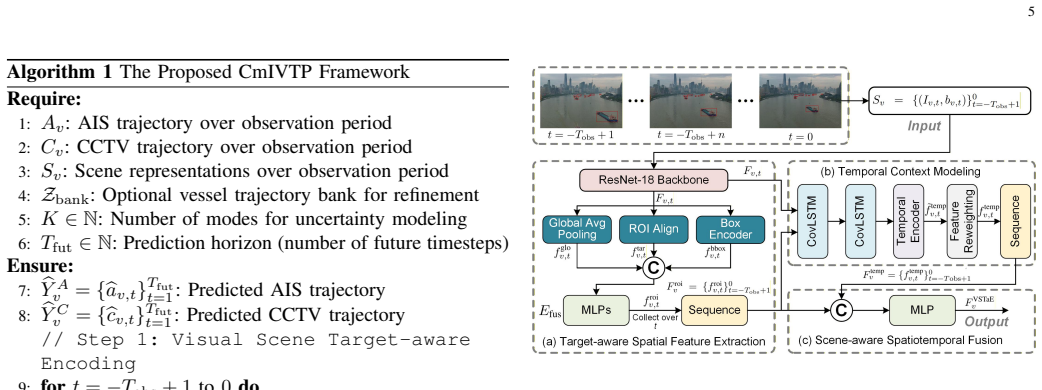
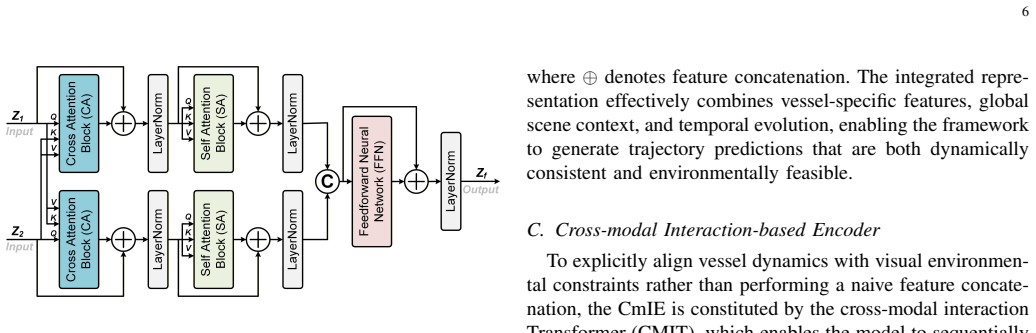
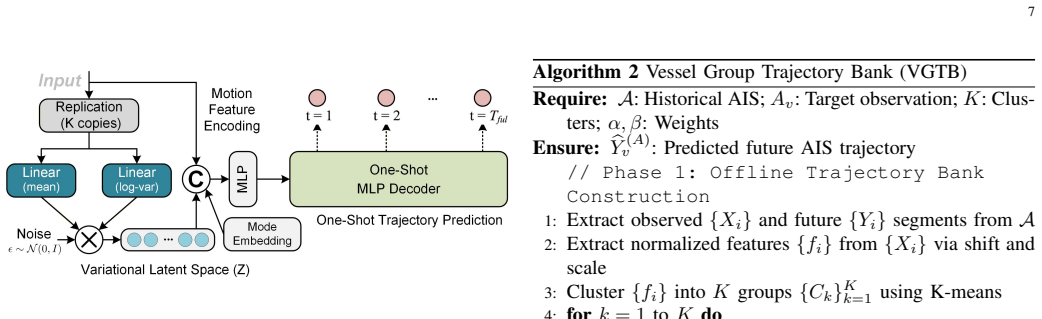
The CmIVTP framework models intricate interactions between vessel dynamics and environmental constraints by extracting scene semantic features with a target-aware scene encoder and integrating AIS-derived motion features, CCTV-based environmental features, and scene representations inside a cross-modal interaction transformer that applies cross-modal attention to capture intra-modal and inter-modal relations, while a vessel group trajectory bank supplies representative motion patterns from clustered historical data, yielding improved performance on multimodal benchmarks.
What carries the argument
The cross-modal interaction transformer, which integrates AIS motion features, CCTV environmental features, and scene representations using cross-modal attention mechanisms to capture both intra-modal semantics and inter-modal interactions.
If this is right
- Trajectory predictions become both dynamically consistent and aligned with environmental features extracted from CCTV.
- Candidate trajectories can be generated efficiently at scale using the pre-clustered vessel group trajectory bank.
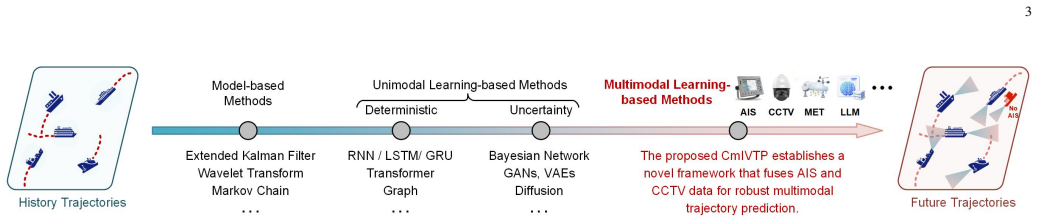
- Research on multimodal maritime prediction gains support from the released synchronized AIS-CCTV dataset.
- Overall accuracy improves over single-source methods on standard multimodal vessel trajectory benchmarks.
Where Pith is reading between the lines
- The same fusion pattern could be tested on other sensor pairs, such as radar plus camera, for surface vehicle tracking.
- The trajectory bank approach suggests that pre-computed motion clusters may reduce inference cost in real-time maritime systems.
- If the attention fusion proves stable, similar cross-modal designs might apply to prediction tasks in aviation or rail transport.
Load-bearing premise
The cross-modal attention mechanisms will produce dynamically consistent and environmentally feasible predictions when fusing sparse AIS data with CCTV features.
What would settle it
A held-out test set in which the model's generated trajectories repeatedly exceed realistic vessel speed limits, turning radii, or navigation constraints would show the claim does not hold.
Figures
read the original abstract
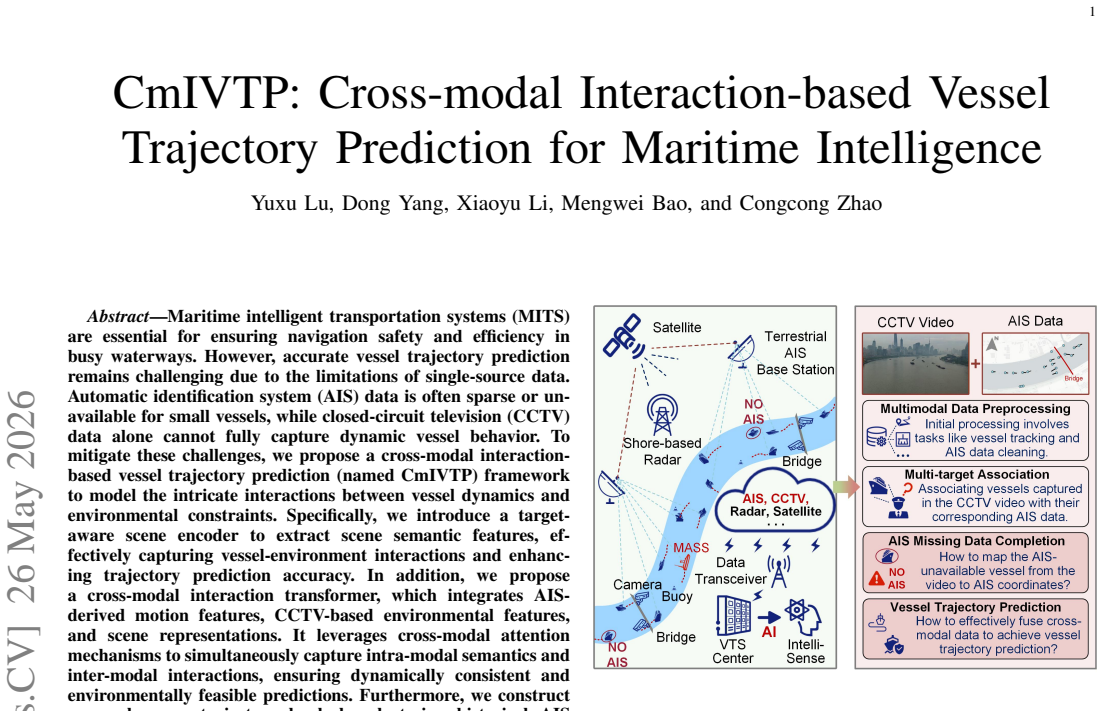
Maritime intelligent transportation systems (MITS) are essential for ensuring navigation safety and efficiency in busy waterways. However, accurate vessel trajectory prediction remains challenging due to the limitations of single-source data. Automatic identification system (AIS) data is often sparse or unavailable for small vessels, while closed-circuit television (CCTV) data alone cannot fully capture dynamic vessel behavior. To mitigate these challenges, we propose a cross-modal interaction-based vessel trajectory prediction (named CmIVTP) framework to model the intricate interactions between vessel dynamics and environmental constraints. Specifically, we introduce a target-aware scene encoder to extract scene semantic features, effectively capturing vessel-environment interactions and enhancing trajectory prediction accuracy. In addition, we propose a cross-modal interaction transformer, which integrates AIS-derived motion features, CCTV-based environmental features, and scene representations. It leverages cross-modal attention mechanisms to simultaneously capture intra-modal semantics and inter-modal interactions, ensuring dynamically consistent and environmentally feasible predictions. Furthermore, we construct a vessel group trajectory bank by clustering historical AIS trajectories into representative motion patterns, providing an efficient and scalable approach for candidate trajectory generation. Additionally, we introduce the maritime multimodal dataset plus (named Maritime-MmD$^+$), a large-scale dataset that synchronizes AIS data and CCTV video data, providing robust support for multimodal trajectory prediction research. Extensive experiments demonstrate that CmIVTP achieves better performance on multimodal-driven vessel trajectory prediction benchmarks. The code resources for this work can be available at https://github.com/LouisYxLu/CmIVTP.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
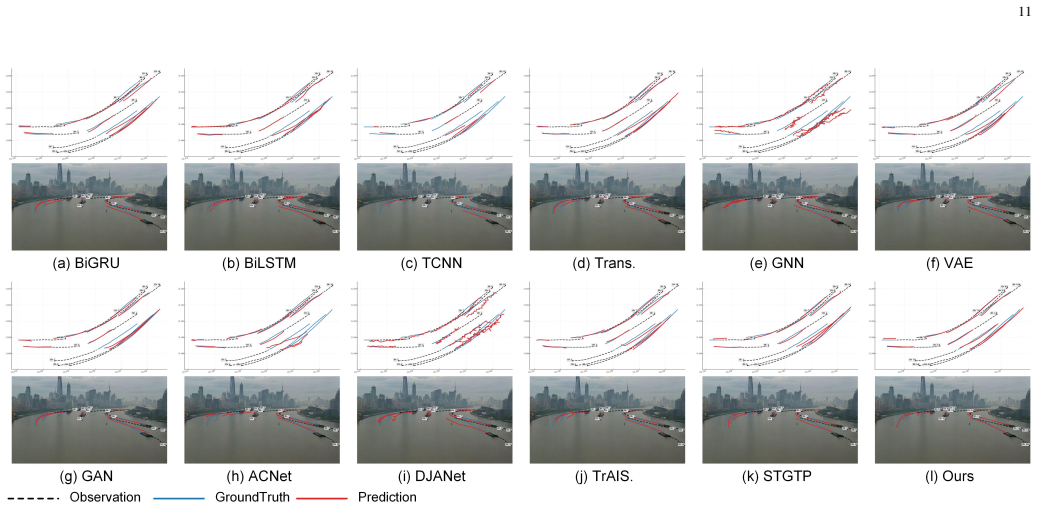
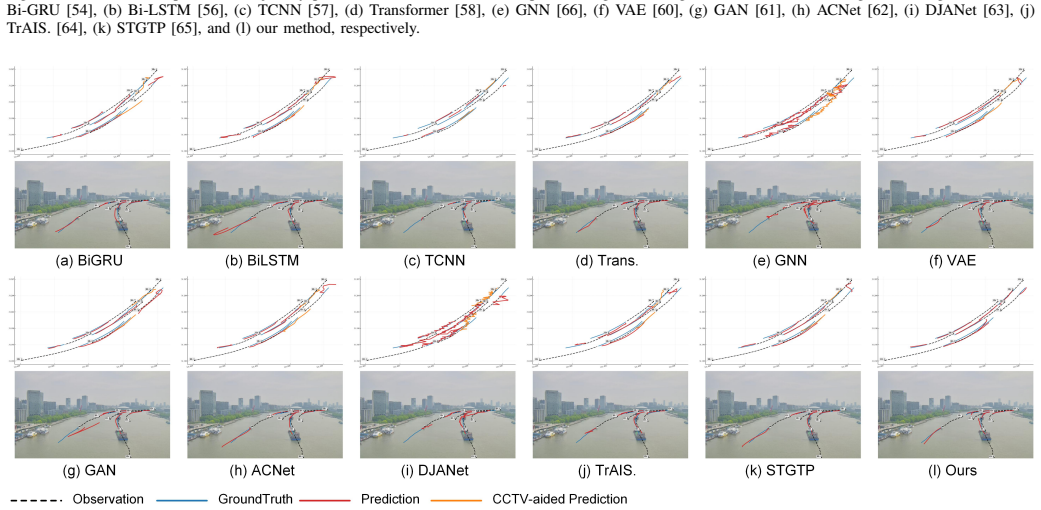
Summary. The manuscript proposes CmIVTP, a multimodal framework for vessel trajectory prediction that fuses sparse AIS motion data with CCTV scene features. It introduces a target-aware scene encoder, a cross-modal interaction transformer using attention to capture intra- and inter-modal interactions, a vessel group trajectory bank derived from clustered historical AIS trajectories, and the new Maritime-MmD+ synchronized dataset. The central claims are that the architecture produces dynamically consistent and environmentally feasible predictions and achieves superior benchmark performance.
Significance. If the quantitative gains and feasibility claims hold under rigorous validation, the work would address a practical gap in maritime intelligence systems by demonstrating effective use of complementary sparse and visual data sources for trajectory forecasting.
major comments (2)
- [cross-modal interaction transformer] The cross-modal interaction transformer description asserts that its attention mechanisms 'ensure dynamically consistent and environmentally feasible predictions,' yet no kinematic constraints, collision penalties, waterway masks, or other explicit regularizers are specified; feasibility therefore reduces to an emergent statistical property of the training distribution rather than an architectural guarantee. This is load-bearing for the central claim.
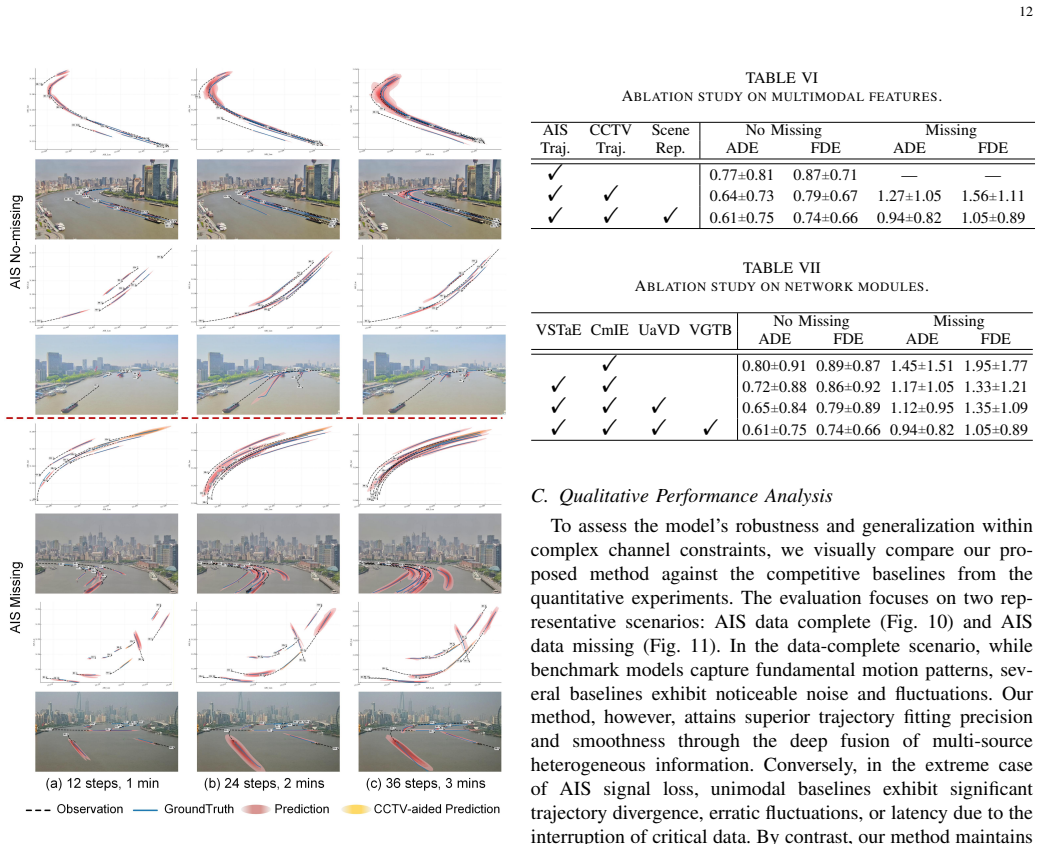
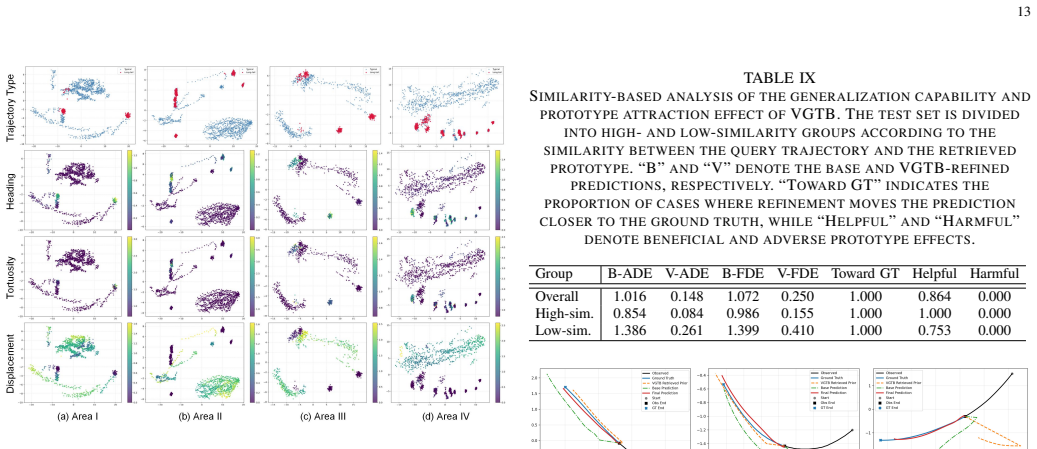
- [experiments] The experimental claims of superior performance on multimodal-driven benchmarks are stated without any reported quantitative metrics, baseline comparisons, ablation results, error distributions, or protocol details (e.g., train/test splits, missing-data handling). This prevents evaluation of the performance assertions.
minor comments (2)
- [abstract] Abstract: 'The code resources for this work can be available at' is grammatically awkward; rephrase to 'Code is available at'.
- [dataset introduction] Notation for the new dataset is introduced as 'Maritime-MmD$^+$' but the superscript is not consistently rendered or explained in the text.
Simulated Author's Rebuttal
We thank the referee for the thorough and constructive review. We address each major comment below and commit to revisions where needed to strengthen the manuscript.
read point-by-point responses
-
Referee: [cross-modal interaction transformer] The cross-modal interaction transformer description asserts that its attention mechanisms 'ensure dynamically consistent and environmentally feasible predictions,' yet no kinematic constraints, collision penalties, waterway masks, or other explicit regularizers are specified; feasibility therefore reduces to an emergent statistical property of the training distribution rather than an architectural guarantee. This is load-bearing for the central claim.
Authors: We agree that the manuscript wording overstates the role of the attention mechanisms. The cross-modal interaction transformer captures intra- and inter-modal dependencies from the synchronized AIS-CCTV data, allowing the model to learn dynamically consistent and feasible behaviors as an emergent property of the training distribution. No explicit kinematic or collision constraints are imposed. We will revise the relevant sections to remove any implication of an architectural guarantee and instead describe the outcome as data-driven. revision: yes
-
Referee: [experiments] The experimental claims of superior performance on multimodal-driven benchmarks are stated without any reported quantitative metrics, baseline comparisons, ablation results, error distributions, or protocol details (e.g., train/test splits, missing-data handling). This prevents evaluation of the performance assertions.
Authors: The current manuscript version presents only high-level claims in the abstract and introduction. We will add a complete experimental section in the revision that reports all quantitative metrics, baseline comparisons, ablation studies, error distributions, and full protocol details including train/test splits and missing-data handling procedures. revision: yes
Circularity Check
No significant circularity in the derivation chain
full rationale
The paper is a method description of a cross-modal transformer architecture for multimodal vessel trajectory prediction. No equations, derivations, or first-principles results are presented that could reduce to their inputs by construction. The central claim is empirical performance on benchmarks, evaluated externally via experiments rather than derived from self-referential definitions, fitted parameters renamed as predictions, or self-citation chains. The architecture uses standard attention mechanisms and clustering of historical data for candidate generation, with no load-bearing self-citations or uniqueness theorems invoked. This is a self-contained empirical ML contribution with no circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Maritime intelligent transport systems,
Z. Pietrzykowski, “Maritime intelligent transport systems,” inProc. TST. Springer, 2010, pp. 455–462
2010
-
[2]
Real-time graph-based traffic complexity evaluation for intelligent maritime supervision using multi- source data fusion,
C. Zhao, Y . Lu, D. Yang, and T. L. Yip, “Real-time graph-based traffic complexity evaluation for intelligent maritime supervision using multi- source data fusion,”Reliab. Eng. Syst. Saf., p. 112380, 2026
2026
-
[3]
Real-time collision risk based safety management for vessel traffic in busy ports and waterways,
M. Li, J. Mou, P. Chen, L. Chen, and P. van Gelder, “Real-time collision risk based safety management for vessel traffic in busy ports and waterways,”Ocean Coastal Manage., vol. 234, p. 106471, 2023
2023
-
[4]
Stmgcn: Mobile edge computing-empowered vessel trajectory predic- tion using spatio-temporal multigraph convolutional network,
R. W. Liu, M. Liang, J. Nie, Y . Yuan, Z. Xiong, H. Yu, and N. Guizani, “Stmgcn: Mobile edge computing-empowered vessel trajectory predic- tion using spatio-temporal multigraph convolutional network,”IEEE Trans. Ind. Inf., vol. 18, no. 11, pp. 7977–7987, 2022
2022
-
[5]
Real- time multi-scene visibility enhancement for promoting navigational safety of vessels under complex weather conditions,
R. W. Liu, Y . Lu, Y . Gao, Y . Guo, W. Ren, F. Zhu, and F.-Y . Wang, “Real- time multi-scene visibility enhancement for promoting navigational safety of vessels under complex weather conditions,”IEEE Trans. Intell. Transp. Syst., vol. 25, no. 12, pp. 19 979–19 994, 2024
2024
-
[6]
Risk assessment of the operations of maritime autonomous surface ships,
C.-H. Chang, C. Kontovas, Q. Yu, and Z. Yang, “Risk assessment of the operations of maritime autonomous surface ships,”Reliab. Eng. Syst. Saf., vol. 207, p. 107324, 2021
2021
-
[7]
Cloud shore ship collaborative computing for intelligent navigation of inland river ships: Architecture design, operation model and application,
H. Chen, Y . Wen, J. Yang, C. Xiao, and Z. Sui, “Cloud shore ship collaborative computing for intelligent navigation of inland river ships: Architecture design, operation model and application,”IEEE Internet Things J., vol. 12, no. 18, pp. 38 943–38 964, 2025
2025
-
[8]
Next-generation vessel traffic services systems—from “passive
Z. Xiao, X. Fu, L. Zhao, L. Zhang, T. K. Teo, N. Li, W. Zhang, and Z. Qin, “Next-generation vessel traffic services systems—from “passive” to “proactive”,”IEEE Intell. Transp. Syst. Mag., vol. 15, no. 1, pp. 363– 377, 2022
2022
-
[9]
Graph learning-driven multi-vessel association: Fusing multimodal data for maritime intelligence,
Y . Lu, K. Yang, D. Yang, H. Ding, J. Weng, and R. W. Liu, “Graph learning-driven multi-vessel association: Fusing multimodal data for maritime intelligence,”IEEE Trans. Intell. Transp. Syst., vol. 27, no. 5, pp. 5739–5754, 2026
2026
-
[10]
Ex- ploiting ais data for intelligent maritime navigation: A comprehensive survey from data to methodology,
E. Tu, G. Zhang, L. Rachmawati, E. Rajabally, and G.-B. Huang, “Ex- ploiting ais data for intelligent maritime navigation: A comprehensive survey from data to methodology,”IEEE Trans. Intell. Transp. Syst., vol. 19, no. 5, pp. 1559–1582, 2017
2017
-
[11]
Ais-based maritime anomaly traffic detection: A review,
C. V . Ribeiro, A. Paes, and D. de Oliveira, “Ais-based maritime anomaly traffic detection: A review,”Expert Syst. Appl., vol. 231, p. 120561, 2023
2023
-
[12]
Asynchronous trajectory matching-based multimodal maritime data fusion for vessel traffic surveillance in inland waterways,
Y . Guo, R. W. Liu, J. Qu, Y . Lu, F. Zhu, and Y . Lv, “Asynchronous trajectory matching-based multimodal maritime data fusion for vessel traffic surveillance in inland waterways,”IEEE Trans. Intell. Transp. Syst., vol. 24, no. 11, pp. 12 779–12 792, 2023. 15
2023
-
[13]
Vessel trajectory prediction in maritime transportation: Current approaches and beyond,
X. Zhang, X. Fu, Z. Xiao, H. Xu, and Z. Qin, “Vessel trajectory prediction in maritime transportation: Current approaches and beyond,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 11, pp. 19 980–19 998, 2022
2022
-
[14]
Ais data-driven ship trajectory prediction modelling and analysis based on machine learning and deep learning methods,
H. Li, H. Jiao, and Z. Yang, “Ais data-driven ship trajectory prediction modelling and analysis based on machine learning and deep learning methods,”Transp. Res. Part E Logist. Transp. Rev., vol. 175, p. 103152, 2023
2023
-
[15]
Uncertainty- aware vessel trajectory prediction for heterogeneous data fusion in internet of things-driven smart waterways,
Y . Lu, K. Yang, D. Yang, H. Ding, J. Weng, and M. Zhang, “Uncertainty- aware vessel trajectory prediction for heterogeneous data fusion in internet of things-driven smart waterways,”Eng. Appl. Artif. Intell., vol. 177, p. 114930, 2026
2026
-
[16]
Resilient inland vessel trajectory prediction via visual-kinematic data imputation and interaction-aware graph learning,
M. Bao, Y . Lu, X. Li, H. Ding, D. Yang, and M. Zhang, “Resilient inland vessel trajectory prediction via visual-kinematic data imputation and interaction-aware graph learning,”Ocean Eng., vol. 359, p. 125842, 2026
2026
-
[17]
Forecasting human trajectory from scene history,
M. Meng, Z. Wu, T. Chen, X. Cai, X. Zhou, F. Yang, and D. Shen, “Forecasting human trajectory from scene history,”NeurIPS, vol. 35, pp. 24 920–24 933, 2022
2022
-
[18]
Long-short term spatio-temporal aggregation for trajectory prediction,
C. Yang and Z. Pei, “Long-short term spatio-temporal aggregation for trajectory prediction,”IEEE Trans. Intell. Transp. Syst., vol. 24, no. 4, pp. 4114–4126, 2023
2023
-
[19]
Intention- aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for internet of vehicles,
X. Chen, H. Zhang, F. Zhao, Y . Hu, C. Tan, and J. Yang, “Intention- aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for internet of vehicles,”IEEE Trans. Intell. Transp. Syst., vol. 23, no. 10, pp. 19 471–19 483, 2022
2022
-
[20]
Emsin: Enhanced multistream interaction network for vehicle trajectory prediction,
Y . Ren, Z. Lan, L. Liu, and H. Yu, “Emsin: Enhanced multistream interaction network for vehicle trajectory prediction,”IEEE Trans. Fuzzy Syst., vol. 33, no. 1, pp. 54–68, 2024
2024
-
[21]
The steering and course keeping qualities of high-speed craft and the inception of dynamic instabilities in the following sea,
M. Bonci, P. De Jong, F. Van Walree, M. Renilson, and R. Huijsmans, “The steering and course keeping qualities of high-speed craft and the inception of dynamic instabilities in the following sea,”Ocean Eng., vol. 194, p. 106636, 2019
2019
-
[22]
Review of maritime traffic models from vessel behavior modeling perspective,
Y . Zhou, W. Daamen, T. Vellinga, and S. Hoogendoorn, “Review of maritime traffic models from vessel behavior modeling perspective,” Transp. Res. Part C Emerging Technol., vol. 105, pp. 323–345, 2019
2019
-
[23]
Ocean vessel trajectory estimation and prediction based on extended kalman filter,
L. P. Perera, C. G. Soareset al., “Ocean vessel trajectory estimation and prediction based on extended kalman filter,” inProc. ADAPTIVE. Citeseer, 2010, pp. 14–20
2010
-
[24]
Variable-and fixed-structure aug- mented interacting multiple-model algorithms for manoeuvring ship tracking based on new ship models,
E. Semerdjiev and L. Mihaylova, “Variable-and fixed-structure aug- mented interacting multiple-model algorithms for manoeuvring ship tracking based on new ship models,”Int. J. Appl. Math. Comput. Sci., vol. 10, no. 3, pp. 591–604, 2000
2000
-
[25]
Wavelet analysis based hidden markov model for large ship trajectory prediction,
X. Zhang, G. Liu, C. Hu, and X. Ma, “Wavelet analysis based hidden markov model for large ship trajectory prediction,” inProc. CCC. IEEE, 2019, pp. 2913–2918
2019
-
[26]
Trajectory prediction for ocean vessels base on k-order multivariate markov chain,
S. Guo, C. Liu, Z. Guo, Y . Feng, F. Hong, and H. Huang, “Trajectory prediction for ocean vessels base on k-order multivariate markov chain,” inProc. WASA. Springer, 2018, pp. 140–150
2018
-
[27]
Ship collision avoidance methods: State-of-the-art,
Y . Huang, L. Chen, P. Chen, R. R. Negenborn, and P. Van Gelder, “Ship collision avoidance methods: State-of-the-art,”Saf. Sci., vol. 121, pp. 451–473, 2020
2020
-
[28]
Deep learning methods for vessel trajectory prediction based on recurrent neural networks,
S. Capobianco, L. M. Millefiori, N. Forti, P. Braca, and P. Willett, “Deep learning methods for vessel trajectory prediction based on recurrent neural networks,”IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 6, pp. 4329–4346, 2021
2021
-
[29]
Application of coordinate systems for vessel trajectory prediction improvement using a recurrent neural networks,
R. Jurkus, J. Venskus, and P. Treigys, “Application of coordinate systems for vessel trajectory prediction improvement using a recurrent neural networks,”Eng. Appl. Artif. Intell., vol. 123, p. 106448, 2023
2023
-
[30]
Deep learning-powered vessel trajectory prediction for improving smart traffic services in maritime internet of things,
R. W. Liu, M. Liang, J. Nie, W. Y . B. Lim, Y . Zhang, and M. Guizani, “Deep learning-powered vessel trajectory prediction for improving smart traffic services in maritime internet of things,”IEEE Trans. Network Sci. Eng., vol. 9, no. 5, pp. 3080–3094, 2022
2022
-
[31]
An efficient lstm neural network-based framework for vessel location fore- casting,
E. Chondrodima, N. Pelekis, A. Pikrakis, and Y . Theodoridis, “An efficient lstm neural network-based framework for vessel location fore- casting,”IEEE Trans. Intell. Transp. Syst., vol. 24, no. 5, pp. 4872–4888, 2023
2023
-
[32]
Fb-bigru: A deep learning model for ais-based vessel trajectory curve fitting and analysis,
J. Chen, H. Chen, Y . Zhao, and X. Li, “Fb-bigru: A deep learning model for ais-based vessel trajectory curve fitting and analysis,”Ocean Eng., vol. 266, p. 112898, 2022
2022
-
[33]
An ais-based deep learning framework for regional ship behavior prediction,
B. Murray and L. P. Perera, “An ais-based deep learning framework for regional ship behavior prediction,”Reliab. Eng. Syst. Saf., vol. 215, p. 107819, 2021
2021
-
[34]
Vessel trajectory prediction based on spatio-temporal graph convolutional network for complex and crowded sea areas,
S. Wang, Y . Li, H. Xing, and Z. Zhang, “Vessel trajectory prediction based on spatio-temporal graph convolutional network for complex and crowded sea areas,”Ocean Eng., vol. 298, p. 117232, 2024
2024
-
[35]
Enhancing risk perception by integrat- ing ship interactions in multi-ship encounters: A graph-based learning method,
K. Yang, D. Yang, and Y . Lu, “Enhancing risk perception by integrat- ing ship interactions in multi-ship encounters: A graph-based learning method,”Reliab. Eng. Syst. Saf., vol. 261, p. 111150, 2025
2025
-
[36]
Multiple variational kalman-gru for ship trajectory prediction with uncertainty,
C. Jia, J. Ma, and W. M. Kouw, “Multiple variational kalman-gru for ship trajectory prediction with uncertainty,”IEEE Trans. Aerosp. Electron. Syst., vol. 61, no. 2, pp. 3654–3667, 2024
2024
-
[37]
Ship trajectory uncertainty prediction based on a gaussian process model,
H. Rong, A. Teixeira, and C. G. Soares, “Ship trajectory uncertainty prediction based on a gaussian process model,”Ocean Eng., vol. 182, pp. 499–511, 2019
2019
-
[38]
Probabilistic mar- itime trajectory prediction in complex scenarios using deep learning,
K. A. Sørensen, P. Heiselberg, and H. Heiselberg, “Probabilistic mar- itime trajectory prediction in complex scenarios using deep learning,” Sensors, vol. 22, no. 5, p. 2058, 2022
2058
-
[39]
Toward multimodal vessel trajectory prediction by modeling the distribution of modes,
S. Guo, H. Zhang, and Y . Guo, “Toward multimodal vessel trajectory prediction by modeling the distribution of modes,”Ocean Eng., vol. 282, p. 115020, 2023
2023
-
[40]
Regional ship behavior and trajectory prediction for maritime traffic management: A social generative adversarial network approach,
P. Chen, F. Yang, J. Mou, L. Chen, and M. Li, “Regional ship behavior and trajectory prediction for maritime traffic management: A social generative adversarial network approach,”Ocean Eng., vol. 299, p. 117186, 2024
2024
-
[41]
Interaction-aware short-term marine vessel trajectory prediction with deep generative models,
P. Han, M. Zhu, and H. Zhang, “Interaction-aware short-term marine vessel trajectory prediction with deep generative models,”IEEE Trans. Ind. Inf., vol. 20, no. 3, pp. 3188–3196, 2023
2023
-
[42]
Probabilistic and interaction- aware trajectory prediction using score-based diffusion models,
P. Han, M. Zhu, W. Tian, and H. Zhang, “Probabilistic and interaction- aware trajectory prediction using score-based diffusion models,”IEEE Trans. Ind. Inf., vol. 22, no. 1, pp. 510–519, 2025
2025
-
[43]
Tripleconvtransformer: A deep learning vessel trajectory prediction method fusing discretized meteorological data,
P. Huang, Q. Chen, D. Wang, M. Wang, X. Wu, and X. Huang, “Tripleconvtransformer: A deep learning vessel trajectory prediction method fusing discretized meteorological data,”Front. Environ. Sci., vol. 10, p. 1012547, 2022
2022
-
[44]
An adaptive multimodal data vessel trajectory prediction model based on a satellite automatic identification system and environmental data,
Y . Xiao, Y . Hu, J. Liu, Y . Xiao, and Q. Liu, “An adaptive multimodal data vessel trajectory prediction model based on a satellite automatic identification system and environmental data,”J. Mar. Sci. Eng., vol. 12, no. 3, p. 513, 2024
2024
-
[45]
Multimodal deep learning framework for vessel trajectory prediction,
J. Luo, Y . Xiao, Y . Li, Y . Xiao, and W. Yao, “Multimodal deep learning framework for vessel trajectory prediction,”Ocean Eng., vol. 336, p. 121766, 2025
2025
-
[46]
St-feitnet: A trajectory prediction model for complex sea states via multiscale spa- tiotemporal feature extraction and cross-modal frequency enhancement,
X. Zhou, F. Zheng, H. Yang, N. Guo, A. Yu, and J. Wang, “St-feitnet: A trajectory prediction model for complex sea states via multiscale spa- tiotemporal feature extraction and cross-modal frequency enhancement,” Ocean Eng., vol. 342, p. 122922, 2025
2025
-
[47]
Semint: An llm-empowered long-term vessel trajectory prediction framework,
N. Chen, A. Yang, H. Wu, L. Chen, W. Xiong, and N. Jing, “Semint: An llm-empowered long-term vessel trajectory prediction framework,” Int. J. Geogr. Inf. Sci., pp. 1–35, 2025
2025
-
[48]
Llm4stp: A large language model-driven multi-feature fusion method for ship trajectory prediction,
H. Jiao, J. Gong, H. Li, J. S. L. Lam, Y . Shu, J. Wang, and Z. Yang, “Llm4stp: A large language model-driven multi-feature fusion method for ship trajectory prediction,”Transp. Res. Part E Logist. Transp. Rev., vol. 207, p. 104599, 2026
2026
-
[49]
H. Park, J. Jung, M. Seo, H. Choi, D. Cho, S. Park, and D.-G. Choi, “Ais- llm: A unified framework for maritime trajectory prediction, anomaly detection, and collision risk assessment with explainable forecasting,” arXiv preprint arXiv:2508.07668, 2025
-
[50]
Heterogeneous graph social pooling for interaction-aware vehicle trajectory prediction,
X. Mo, Y . Xing, and C. Lv, “Heterogeneous graph social pooling for interaction-aware vehicle trajectory prediction,”Transp. Res. Part E Logist. Transp. Rev., vol. 191, p. 103748, 2024
2024
-
[51]
Learning ship activity patterns in maritime data streams: enhancing cep rule learning by temporal and spatial relations and domain-specific functions,
R. Bruns, J. Dunkel, and S. Seremet, “Learning ship activity patterns in maritime data streams: enhancing cep rule learning by temporal and spatial relations and domain-specific functions,”IEEE Trans. Intell. Transp. Syst., vol. 24, no. 10, pp. 11 384–11 395, 2023
2023
-
[52]
Deep residual learning for image recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,” inProc. IEEE CVPR, 2016, pp. 770–778
2016
-
[53]
Convolutional lstm network: A machine learning approach for precipitation nowcasting,
X. Shi, Z. Chen, H. Wang, D.-Y . Yeung, W.-K. Wong, and W.-c. Woo, “Convolutional lstm network: A machine learning approach for precipitation nowcasting,”NeurIPS, vol. 28, pp. 802–810, 2015
2015
-
[54]
Learning phrase representations using rnn encoder-decoder for statistical machine translation,
K. Cho, B. Van Merri ¨enboer, C. Gulcehre, D. Bahdanau, F. Bougares, H. Schwenk, and Y . Bengio, “Learning phrase representations using rnn encoder-decoder for statistical machine translation,” inProc. EMNLP, 2014
2014
-
[55]
Long short-term memory,
S. Hochreiter and J. Schmidhuber, “Long short-term memory,”Neural Comput., vol. 9, no. 8, pp. 1735–1780, 1997
1997
-
[56]
Bidirectional recurrent neural net- works,
M. Schuster and K. K. Paliwal, “Bidirectional recurrent neural net- works,”IEEE Trans. Signal Process., vol. 45, no. 11, pp. 2673–2681, 1997
1997
-
[57]
An empirical evaluation of generic convolutional and recurrent networks for sequence modeling,
S. Bai, J. Z. Kolter, and V . Koltun, “An empirical evaluation of generic convolutional and recurrent networks for sequence modeling,” inProc. ICLR, 2018. 16
2018
-
[58]
Attention is all you need,
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,”NeurIPS, vol. 30, 2017
2017
-
[59]
The graph neural network model,
F. Scarselli, M. Gori, A. C. Tsoi, M. Hagenbuchner, and G. Monfardini, “The graph neural network model,”IEEE Trans. Neural Networks, vol. 20, no. 1, pp. 61–80, 2008
2008
-
[60]
Auto-Encoding Variational Bayes
D. P. Kingma and M. Welling, “Auto-encoding variational bayes,”arXiv preprint arXiv:1312.6114, 2013
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[61]
Generative adversarial networks,
I. Goodfellow, J. Pouget-Abadie, M. Mirza, B. Xu, D. Warde-Farley, S. Ozair, A. Courville, and Y . Bengio, “Generative adversarial networks,” Commun. ACM, vol. 63, no. 11, pp. 139–144, 2020
2020
-
[62]
Deep learning framework for vessel trajectory prediction using auxiliary tasks and convolutional networks,
Y . Shin, N. Kim, H. Lee, S. Y . In, M. Hansen, and Y . Yoon, “Deep learning framework for vessel trajectory prediction using auxiliary tasks and convolutional networks,”Eng. Appl. Artif. Intell., vol. 132, p. 107936, 2024
2024
-
[63]
Stia-djanet: spatial–temporal intention-aware vessel trajectory prediction based on dual-joint attention network for e-navigation,
J. Jiang and Y . Zuo, “Stia-djanet: spatial–temporal intention-aware vessel trajectory prediction based on dual-joint attention network for e-navigation,”Expert Syst. Appl., vol. 262, p. 125550, 2025
2025
-
[64]
A transformer network with sparse aug- mented data representation and cross entropy loss for ais-based vessel trajectory prediction,
D. Nguyen and R. Fablet, “A transformer network with sparse aug- mented data representation and cross entropy loss for ais-based vessel trajectory prediction,”IEEE Access, vol. 12, pp. 21 596–21 609, 2024
2024
-
[65]
Uncertainty-aware ship trajectory prediction via spatio-temporal graph transformer,
J. Gong, H. Li, H. Jiao, and Z. Yang, “Uncertainty-aware ship trajectory prediction via spatio-temporal graph transformer,”Transp. Res. Part E Logist. Transp. Rev., vol. 203, p. 104315, 2025
2025
-
[66]
Generative adversarial nets,
I. J. Goodfellow, J. Pouget-Abadie, M. Mirza, B. Xu, D. Warde-Farley, S. Ozair, A. Courville, and Y . Bengio, “Generative adversarial nets,” NeurIPS, vol. 27, 2014
2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.