Damage Adaptation in Seconds for Architected Materials
Pith reviewed 2026-06-27 01:24 UTC · model grok-4.3
The pith
Latent damage representations combined with an ensemble method enable real-time adaptation to unseen damage in soft robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
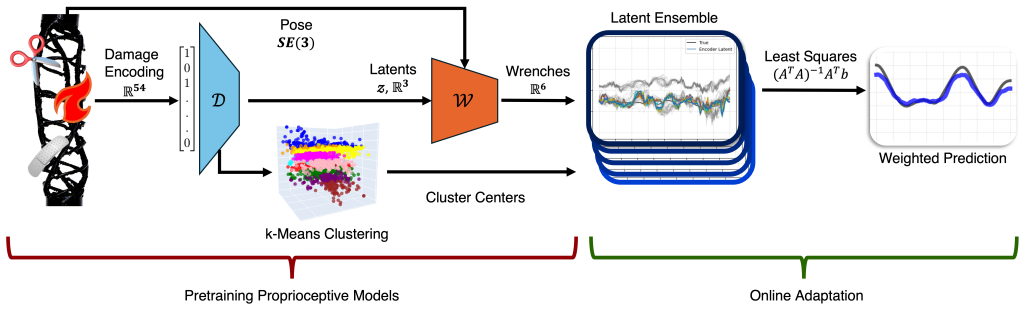
Latent damage representations plus a simple yet robust ensemble method is sufficient for adapting to unseen damage in real-time. Moreover, we identify conditions under which exponential sample complexity collapses to linear sample complexity for learned representations of architected materials, a concrete advantage over rigid components or continuum soft mechanisms.
What carries the argument
Latent damage representations in a low-dimensional discrete coordinate space, paired with an ensemble method for adaptive proprioception.
If this is right
- Enables simulation-free real-time adaptation to cuts, burns, and actuator repairs.
- Sample complexity for damage learning reduces from exponential to linear under the identified conditions.
- Supports long-term autonomy for soft robots performing tasks like tracing with a 6DoF wrist.
- Provides a concrete advantage for architected materials over rigid or continuum soft systems.
Where Pith is reading between the lines
- The approach may extend to other gradual-damage scenarios in robotics where full modeling is impractical.
- It could reduce reliance on pre-simulated damage models in field deployments.
- Further tests on different actuator geometries would clarify the scope of the linear-complexity regime.
Load-bearing premise
Damage can be described in a low-dimensional, discrete coordinate space.
What would settle it
An experiment showing that adaptation to a new damage type requires more than linear samples or fails to reach real-time performance would disprove the claim.
Figures


read the original abstract
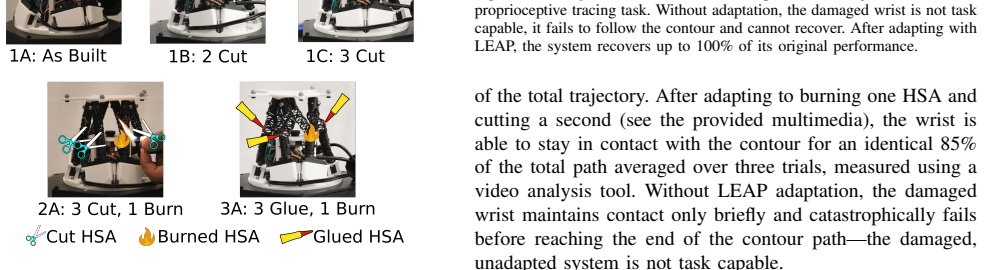
Adaptation to damages and in-situ physical repairs is essential for long-term robot autonomy, yet challenging outside of narrowly defined and well-anticipated bounds. In this work we proprioceptively adapt to catastrophic damage in soft-actuated systems in under one minute. Architected materials are well equipped for adaptation: actuator failure occurs gradually rather than acutely, and damage can be described in a low-dimensional, discrete coordinate space. Surprisingly, latent damage representations plus a simple yet robust ensemble method is sufficient for adapting to unseen damage in real-time. Moreover, we identify conditions under which exponential sample complexity collapses to linear sample complexity for learned representations of architected materials, a concrete advantage over rigid components or continuum soft mechanisms. We demonstrate LEAP, our method for adaptive proprioception, via a tracing task for a 6DoF soft wrist based on Handed Shearing Auxetic (HSA) actuators. Our algorithm is able to adapt to cuts, burns, and actuator repairs, enabling simulation-free real-time adaptation that is critical for realizing the promise of soft robots outside the lab. Videos and more information are available at https://murpheylab.github.io/leap.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents LEAP, a proprioceptive adaptation method for soft-actuated architected materials that uses latent damage representations combined with a simple ensemble approach to achieve real-time adaptation to unseen damage (cuts, burns, actuator repairs) in under one minute. It demonstrates the approach on a 6DoF Handed Shearing Auxetic (HSA) wrist in a tracing task and claims that damage in such systems lives in a low-dimensional discrete coordinate space, enabling a collapse from exponential to linear sample complexity.
Significance. If the central claims hold with supporting derivations and validation, the work would be significant for soft robotics by offering a practical, simulation-free route to damage resilience outside controlled settings. The sample-complexity reduction result would constitute a concrete theoretical advantage over rigid or continuum systems if rigorously derived and tested.
major comments (2)
- [Abstract] Abstract: the central claim that 'latent damage representations plus a simple yet robust ensemble method is sufficient for adapting to unseen damage in real-time' rests on the unvalidated premise that damage occupies a low-dimensional discrete coordinate space; no independent check is supplied that the ensemble exhaustively covers this space or that the exponential-to-linear collapse survives when discreteness is relaxed.
- [Abstract] Abstract: the abstract asserts adaptation to cuts, burns, and repairs but supplies no derivation details, error bars, quantitative performance metrics, or data-exclusion rules, rendering the sufficiency claim for real-time adaptation unverifiable from the provided text.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments on our manuscript. We address each major comment point-by-point below, proposing targeted revisions to improve clarity and verifiability while preserving the core contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'latent damage representations plus a simple yet robust ensemble method is sufficient for adapting to unseen damage in real-time' rests on the unvalidated premise that damage occupies a low-dimensional discrete coordinate space; no independent check is supplied that the ensemble exhaustively covers this space or that the exponential-to-linear collapse survives when discreteness is relaxed.
Authors: The manuscript motivates the low-dimensional discrete coordinate space from the discrete nature of actuator failures in architected materials and derives conditions under which sample complexity reduces from exponential to linear. Experimental results on the 6DoF HSA wrist demonstrate adaptation to multiple unseen damage instances using the ensemble, providing empirical support for coverage of the relevant space. We agree that an explicit independent validation of exhaustive coverage and robustness under relaxed (continuous) discreteness assumptions would strengthen the theoretical claim. We will revise the abstract to qualify the claim with reference to the derived conditions and add a dedicated paragraph in the discussion section addressing the assumptions and potential extensions to continuous damage models. revision: yes
-
Referee: [Abstract] Abstract: the abstract asserts adaptation to cuts, burns, and repairs but supplies no derivation details, error bars, quantitative performance metrics, or data-exclusion rules, rendering the sufficiency claim for real-time adaptation unverifiable from the provided text.
Authors: The abstract is intentionally concise and high-level, as is standard. The full manuscript contains the requested elements: quantitative metrics (adaptation times under one minute, success rates), error bars from repeated trials, derivation of the sample-complexity result, and details on experimental protocols including damage types and data handling. We will revise the abstract to incorporate key quantitative highlights (e.g., adaptation time and performance metrics) within length constraints and ensure all supporting details remain clearly signposted in the main text and supplementary material. revision: partial
Circularity Check
No circularity detected; claims rest on explicit stated assumption
full rationale
The abstract states the low-dimensional discrete damage coordinate space as a premise for architected materials and then shows that an ensemble on latent representations suffices for real-time adaptation under that premise. No equations are given, no fitted parameters are renamed as predictions, and no self-citations are invoked to justify uniqueness or an ansatz. The sample-complexity collapse is presented as following from the discrete framing rather than being smuggled in by definition. The derivation is therefore self-contained on the provided text; external validation would require the full methods section, but nothing in the visible chain reduces to its own inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
M. Gazzola, L. H. Dudte, A. G. McCormick, and L. Ma- hadevan. Forward and inverse problems in the mechanics of soft filaments.Royal Society Open Science, page 171628, 2018. URL https://royalsocietypublishing.org/ doi/10.1098/rsos.171628
-
[2]
EunBi Oh, Taekyoung Kim, Pranav Kaarthik, and Ryan L. Truby. Architected Materials for Soft Robotics. Journal of Materials Research, 2026. URL https://doi. org/10.1557/s43578-025-01778-2
-
[3]
The case for an omni-bodied robot brain, 2025
The Skild AI Team. The case for an omni-bodied robot brain, 2025. URL https://www.skild.ai/blogs/ omni-bodied
2025
-
[4]
Kowalewski, Jiani Guo, Jacob F
Molly Carton, Jakub F. Kowalewski, Jiani Guo, Jacob F. Alpert, Aman Garg, Daniel Revier, and Jeffrey Ian Lip- ton. Bridging hard and soft: Mechanical metamaterials enable rigid torque transmission in soft robots.Science Robotics, 2025. URL https://www.science.org/doi/full/ 10.1126/scirobotics.ads0548
-
[5]
Z. Roth, B. Mooring, and B. Ravani. An overview of robot calibration.IEEE Journal on Robotics and Automa- tion, 1987. URL https://ieeexplore.ieee.org/document/ 1087124/
1987
-
[6]
SpotCheck (joint and camera calibra- tion), 2022
Boston Dynamics. SpotCheck (joint and camera calibra- tion), 2022. URL https://support.bostondynamics.com/s/ article/SpotCheck-Joint-and-Camera-Calibration-49935
2022
-
[7]
MUKCa: Accurate and affordable cobot calibration without external measurement devices, 2025
Giovanni Franzese, Max Spahn, Jens Kober, and Cosimo Della Santina. MUKCa: Accurate and affordable cobot calibration without external measurement devices, 2025. URL https://arxiv.org/abs/2503.12584
arXiv 2025
-
[8]
Data-driven industrial robot arm calibration: A machine learning perspective
Zhibin Li, Shuai Li, and Xin Luo. Data-driven industrial robot arm calibration: A machine learning perspective. In2021 IEEE International Conference on Networking, Sensing and Control (ICNSC), volume 1, pages 1–6,
-
[9]
doi: 10.1109/ICNSC52481.2021.9702246
-
[10]
Handedness in shearing auxetics creates rigid and compliant struc- tures.Science, 2018
Jeffrey Ian Lipton, Robert MacCurdy, et al. Handedness in shearing auxetics creates rigid and compliant struc- tures.Science, 2018. URL https://www.science.org/doi/ abs/10.1126/science.aar4586
-
[11]
Spatially pro- grammable architected materials inspired by the met- allurgical phase engineering.Advanced Materials,
Chen Liu and Minh-Son Pham. Spatially pro- grammable architected materials inspired by the met- allurgical phase engineering.Advanced Materials,
-
[12]
URL https://advanced.onlinelibrary.wiley.com/doi/ abs/10.1002/adma.202305846
-
[13]
Yi Yang, Marcelo A. Dias, and Douglas P. Holmes. Multistable kirigami for tunable architected materials. Phys. Rev. Mater., Nov 2018. URL https://link.aps.org/ doi/10.1103/PhysRevMaterials.2.110601
-
[14]
Taekyoung Kim, Pranav Kaarthik, et al. A flexible, ar- chitected soft robotic actuator for motorized extensional motion.Advanced Intelligent Systems, 2024. URL https:// onlinelibrary.wiley.com/doi/abs/10.1002/aisy.202300866
-
[15]
Rubinstein, and Katia Bertoldi
Ahmad Rafsanjani, Yuerou Zhang, Bangyuan Liu, Shmuel M. Rubinstein, and Katia Bertoldi. Kirigami skins make a simple soft actuator crawl.Science Robotics, 2018. URL https://www.science.org/doi/abs/ 10.1126/scirobotics.aar7555
-
[17]
Jake Ketchum, Sophia Schiffer, et al. Automated gait generation for walking, soft robotic quadrupeds.IEEE International Conference on Intelligent Robots and Sys- tems (IROS), pages 10245–10251, 2023. doi: 10.1109/ IROS55552.2023.10342059
arXiv 2023
-
[18]
Taekyoung Kim, Alexander Torres-Soto, Haodong Wang, and Ryan L. Truby. Architected elas- tomers as load bearing actuators for untethered soft robot walking.Advanced Materials Technologies,
-
[19]
URL https://advanced.onlinelibrary.wiley.com/doi/ abs/10.1002/admt.202500503
-
[20]
Force and speed in a soft stewart platform
Jake Ketchum, James Avtges, et al. Force and speed in a soft stewart platform. In2025 IEEE 8th International Conference on Soft Robotics (RoboSoft), 2025. doi: 10. 1109/RoboSoft63089.2025.11020875
arXiv 2025
-
[21]
Lillian Chin, Michelle C. Yuen, Jeffrey Lipton, Luis H. Trueba, Rebecca Kramer-Bottiglio, and Daniela Rus. A Simple Electric Soft Robotic Gripper with High- Deformation Haptic Feedback. InInternational Confer- ence on Robotics and Automation (ICRA), 2019. URL https://ieeexplore.ieee.org/abstract/document/8794098
arXiv 2019
-
[22]
Taekyoung Kim, Eliot A. Dunn, and Ryan L. Truby. Clutchable soft actuators produce rapid, high-power movements in robotic artificial musculoskeletal systems. IEEE Robotics and Automation Letters, 2026. doi: 10.1109/LRA.2026.3655266
-
[23]
Burden, and Jef- frey Ian Lipton
Joseph Sullivan, Ian Good, Samuel A. Burden, and Jef- frey Ian Lipton. Spring-brake! handed shearing auxetics improve efficiency of hopping and standing, 2025. URL https://arxiv.org/abs/2505.22898
arXiv 2025
-
[24]
James Avtges, Jake Ketchum, Millicent Schlafly, Helena Young, Taekyoung Kim, Allison Pinosky, Ryan L. Truby, and Todd D. Murphey. Real-Time Reinforcement Learn- ing for Dynamic Tasks with a Parallel Soft Robot, 2025. URL http://arxiv.org/abs/2509.19525
Pith/arXiv arXiv 2025
-
[25]
Sample- efficient online control policy learning with real-time recursive model updates
Zixin Zhang, James Avtges, and Todd Murphey. Sample- efficient online control policy learning with real-time recursive model updates. InProceedings of The 9th Conference on Robot Learning, Proceedings of Machine Learning Research. PMLR, 27–30 Sep 2025. URL https://proceedings.mlr.press/v305/zhang25d.html
2025
-
[26]
Tuthill and Eiman Azim
John C. Tuthill and Eiman Azim. Proprioception.Cur- rent Biology, 2018. URL https://www.sciencedirect.com/ science/article/pii/S0960982218300976
2018
-
[27]
Toward perceptive soft robots: Progress and challenges.Advanced Science, 2018
Hongbo Wang, Massimo Totaro, and Lucia Beccai. Toward perceptive soft robots: Progress and challenges.Advanced Science, 2018. URL https://advanced.onlinelibrary.wiley.com/doi/abs/10. 1002/advs.201800541
2018
-
[28]
Yuen, Rebecca Kramer-Bottiglio, and Jamie Paik
Michelle C. Yuen, Rebecca Kramer-Bottiglio, and Jamie Paik. Strain sensor-embedded soft pneumatic actuators for extension and bending feedback. In2018 IEEE International Conference on Soft Robotics (RoboSoft),
-
[29]
doi: 10.1109/ROBOSOFT.2018.8404920
-
[30]
Ryan L. Truby, Lillian Chin, et al. Fluidic innervation sensorizes structures from a single build material.Sci- ence Advances, 2022. doi: 10.1126/sciadv.abq4385
-
[31]
Johnson, Mantas Naris, Maxwell P
Vani Sundaram, Khoi Ly, Brian K. Johnson, Mantas Naris, Maxwell P. Anderson, James Sean Humbert, Niko- laus Correll, and Mark Rentschler. Embedded magnetic sensing for feedback control of soft hasel actuators.IEEE Transactions on Robotics, pages 808–822, 2023. doi: 10.1109/TRO.2022.3200164
-
[32]
Yusen Zhao, Chiao-Yueh Lo, Lecheng Ruan, Chen-Huan Pi, Cheolgyu Kim, Yousif Alsaid, Imri Frenkel, Rossana Rico, Tsu-Chin Tsao, and Ximin He. Somatosensory actuator based on stretchable conductive photothermally responsive hydrogel.Science Robotics, 2021. doi: 10. 1126/scirobotics.abd5483. URL https://www.science.org/ doi/abs/10.1126/scirobotics.abd5483
-
[33]
Annan Zhang, Ryan L. Truby, Lillian Chin, Shuguang Li, and Daniela Rus. Vision-based sensing for electrically- driven soft actuators.IEEE Robotics and Automation Letters, 7(4):11509–11516, 2022. doi: 10.1109/LRA. 2022.3201604
work page doi:10.1109/lra 2022
-
[34]
Yifan Zhu, Mei Hao, Xupeng Zhu, Quentin Bateux, Alex Wong, and Aaron M. Dollar. Forces for free: Vision- based contact force estimation with a compliant hand. Science Robotics, page eadq5046, 2025. URL https:// www.science.org/doi/full/10.1126/scirobotics.adq5046
-
[35]
Dickson Chiu Yu Wong, Yucheng Luo, and Rob Bernar- dus Nicolaas Scharff. Durability of soft pneumatic actuators: A review and benchmarking protocol.Ad- vanced Robotics Research, 2026. URL https://advanced. onlinelibrary.wiley.com/doi/abs/10.1002/adrr.202500172
-
[36]
Abhirup Sarker, Tamzid Ul Islam, and Md. Robiul Islam. A review on recent trends of bioinspired soft robotics: Actuators, control methods, materials selection, sensors, challenges, and future prospects.Advanced Intelligent Systems, 2025. URL https://advanced.onlinelibrary.wiley. com/doi/abs/10.1002/aisy.202400414
-
[37]
Thomas George Thuruthel, Benjamin Shih, Cecilia Laschi, and Michael Thomas Tolley. Soft robot percep- tion using embedded soft sensors and recurrent neural networks.Science Robotics, 2019. URL https://www. science.org/doi/abs/10.1126/scirobotics.aav1488
-
[38]
Shep- herd
Hedan Bai, Young Seong Kim, and Robert F. Shep- herd. Autonomous self-healing optical sensors for dam- age intelligent soft-bodied systems.Science Advances,
-
[39]
URL https://www.science.org/doi/10.1126/sciadv. abq2104
-
[40]
Hal Daumé III, John Langford, and Daniel Marcu
Antoine Cully, Jeff Clune, Danesh Tarapore, and Jean- Baptiste Mouret. Robots that can adapt like animals. Nature, 2015. URL https://doi.org/10.1038/nature14422
-
[41]
Reset-free trial-and-error learning for robot damage recovery.Robotics and Autonomous Systems, 100:236–250, 2018
Konstantinos Chatzilygeroudis, Vassilis Vassiliades, and Jean-Baptiste Mouret. Reset-free trial-and-error learning for robot damage recovery.Robotics and Autonomous Systems, 100:236–250, 2018
2018
-
[42]
Shah, Michael Levin, Rebecca Kramer-Bottiglio, and Josh Bon- gard
Sam Kriegman, Stephanie Walker, Dylan S. Shah, Michael Levin, Rebecca Kramer-Bottiglio, and Josh Bon- gard. Automated shapeshifting for function recovery in damaged robots. InRobotics: Science and Systems XV. Robotics: Science and Systems Foundation, 2019. URL http://dx.doi.org/10.15607/RSS.2019.XV .028
-
[43]
J.C. Bongard and H. Lipson. Automated damage di- agnosis and recovery for remote robotics. InIEEE International Conference on Robotics and Automation (ICRA), volume 4, pages 3545–3550, 2004. doi: 10.1109/ ROBOT.2004.1308802
arXiv 2004
-
[44]
Resilient machines through continuous self-modeling.Science,
Josh Bongard, Victor Zykov, and Hod Lipson. Resilient machines through continuous self-modeling.Science,
-
[45]
URL https://www.science.org/doi/abs/10.1126/ science.1133687
-
[46]
Robert Kwiatkowski and Hod Lipson. Task-agnostic self- modeling machines.Science Robotics, 2019. URL https: //www.science.org/doi/abs/10.1126/scirobotics.aau9354
-
[47]
Mengyuan Yan, Yilin Zhu, Ning Jin, and Jeannette Bohg. Self-supervised learning of state estimation for manipulating deformable linear objects.IEEE Robotics and Automation Letters, 5(2):2372–2379, 2020. doi: 10.1109/LRA.2020.2969931
-
[48]
LyTimeT: Towards robust and interpretable state-variable discovery, 2025
Kuai Yu, Crystal Su, Xiang Liu, Judah Goldfeder, Mingyuan Shao, and Hod Lipson. LyTimeT: Towards robust and interpretable state-variable discovery, 2025. URL https://arxiv.org/abs/2510.19716
arXiv 2025
-
[49]
Fully body visual self-modeling of robot morphologies.Science Robotics, 2022
Boyuan Chen, Robert Kwiatkowski, Carl V ondrick, and Hod Lipson. Fully body visual self-modeling of robot morphologies.Science Robotics, 2022
2022
-
[50]
Anuj Pokhrel, Aniket Datar, Mohammad Nazeri, Francesco Cancelliere, and Xuesu Xiao. Zero-shot adap- tation to robot structural damage via natural language- informed kinodynamics modeling, 2026. URL https: //arxiv.org/abs/2602.12385
arXiv 2026
-
[51]
Data-driven inverse design of spinodoid architected materials.GAMM-Mitteilungen, 48, 2025
Alexandra Otto, Max Rosenkranz, Karl Alexander Kalina, and Markus K ¨astner. Data-driven inverse design of spinodoid architected materials.GAMM-Mitteilungen, 48, 2025. doi: 10.1002/gamm.70008
-
[52]
Zuyu Li, Wei Gao, Nicole Kessissoglou, Sebastian Oberst, Michael Yu Wang, and Zhen Luo. Multifunc- tional mechanical metamaterials with tunable double- negative isotropic properties.Materials & Design, 232: 112146, 2023. doi: 10.1016/j.matdes.2023.112146
-
[53]
beta-V AE: Learning basic visual concepts with a constrained variational framework.International Conference on Learning Rep- resentations, 2017
Irina Higgins, Loic Matthey, Arka Pal, Christopher Burgess, Xavier Glorot, Matthew Botvinick, Shakir Mo- hamed, and Alexander Lerchner. beta-V AE: Learning basic visual concepts with a constrained variational framework.International Conference on Learning Rep- resentations, 2017. URL https://openreview.net/forum? id=Sy2fzU9gl
2017
-
[54]
On the Continuity of Rotation Representations in Neural Networks, 2020
Yi Zhou, Connelly Barnes, Jingwan Lu, Jimei Yang, and Hao Li. On the Continuity of Rotation Representations in Neural Networks, 2020. URL http://arxiv.org/abs/1812. 07035
2020
-
[55]
Slaughter.The Linearized Theory of Elas- ticity
William S. Slaughter.The Linearized Theory of Elas- ticity. Birkh ¨auser, Boston, MA, 2002. doi: 10.1007/ 978-1-4612-0093-2
2002
-
[56]
Nonparametric regression using linear combinations of basis functions
Robert Kohn, Michael Smith, et al. Nonparametric regression using linear combinations of basis functions. Statistics and Computing, 11(4):313–322, 2001
2001
-
[57]
Optimal construction of Koopman eigenfunctions for prediction and control
Milan Korda and Igor Mezi ´c. Optimal construction of Koopman eigenfunctions for prediction and control. IEEE Transactions on Automatic Control, 65(12):5114– 5129, 2020
2020
-
[58]
DayDreamer: World models for physical robot learning.6th Annual Conference on Robot Learning, 2022
Philipp Wu, Alejandro Escontrela, Danijar Hafner, Pieter Abbeel, and Ken Goldberg. DayDreamer: World models for physical robot learning.6th Annual Conference on Robot Learning, 2022
2022
-
[59]
Berrueta, Allison Pinosky, et al
Thomas A. Berrueta, Allison Pinosky, et al. Maximum diffusion reinforcement learning.Nature Machine Intel- ligence, 2024. doi: 10.1038/s42256-024-00829-3
-
[60]
lower” platform that connects to a robot arm, and an “upper
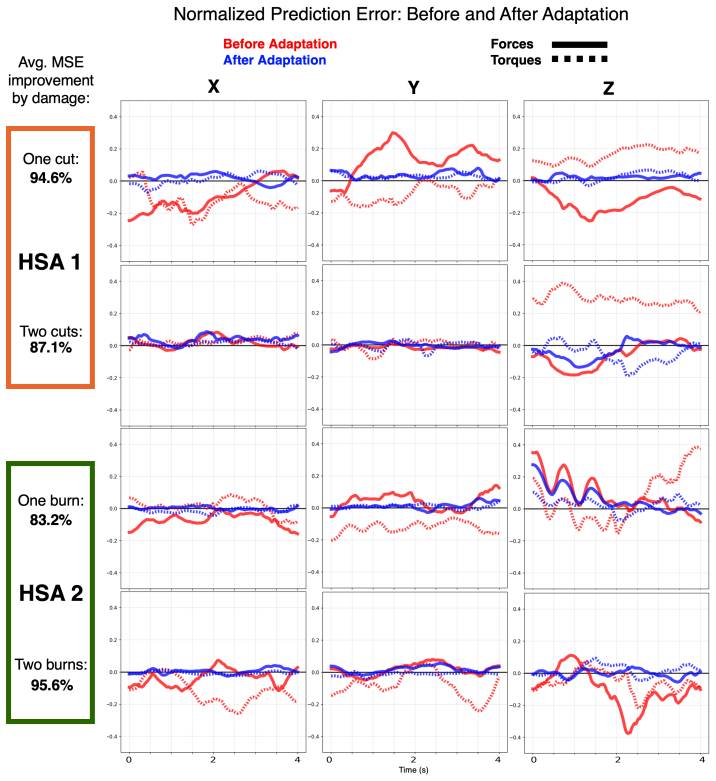
Rolf Pfeifer and Josh Bongard.How the body shapes the way we think: a new view of intelligence. MIT Press, 2006. APPENDIX A. Case Study of Twice-Damaged HSAs Figure 7 shows force-torque prediction errors over time for two HSAs that each undergo two damages sequentially; improved performance is closer to zero. As HSAs produce forces in response to torques ...
2006
-
[61]
Kinematics:A conventional rigid Stewart platform can be kinematically constrained with four values:a l the angle from each anchor point to its associated corner on the lower platform,a u the angle from each anchor point to its associated corner on the upper platform,r l the lower anchor point radius andr u the upper anchor point radius. However, since thi...
-
[62]
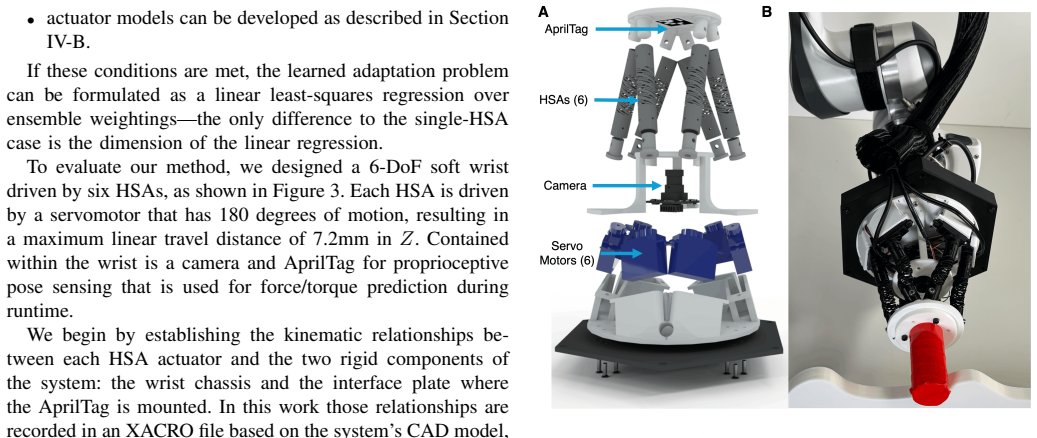
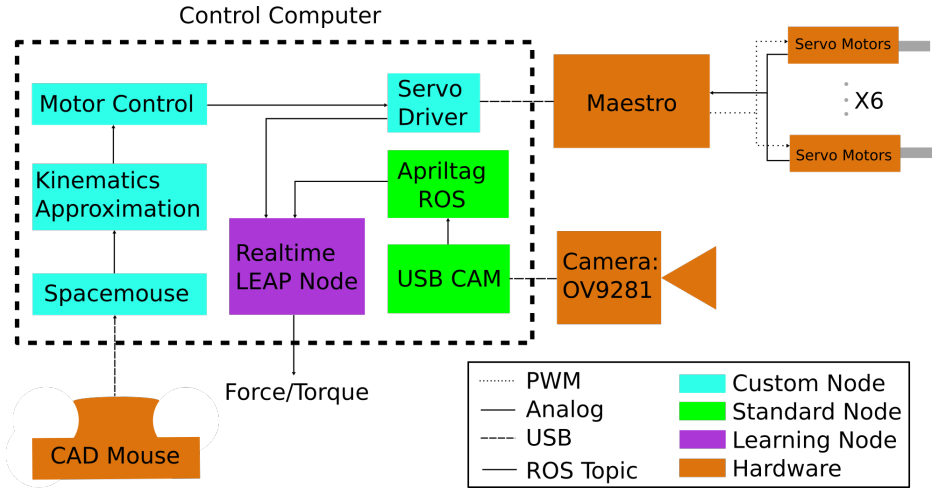
An 0V981 UVC Arducam with an M12 lens provides Apriltag tracking at 100hz and 720p
Control and Electronics:The soft wrist is actuated by six Feetech FT1117M-FB servos that are driven by a Mini Maestro 18 servo driver, which also measures position feedback from each of the servos. An 0V981 UVC Arducam with an M12 lens provides Apriltag tracking at 100hz and 720p. Video data is ingested using the usb cam node, and processed using the apri...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.