MIDS: Detecting Stealthy Masquerade and Tampering Attacks on CAN Bus via Bidirectional Mamba
Pith reviewed 2026-06-26 20:54 UTC · model grok-4.3
The pith
A dual-stream bidirectional Mamba detects in-place masquerade attacks on CAN bus by jointly modeling ID and payload sequences.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
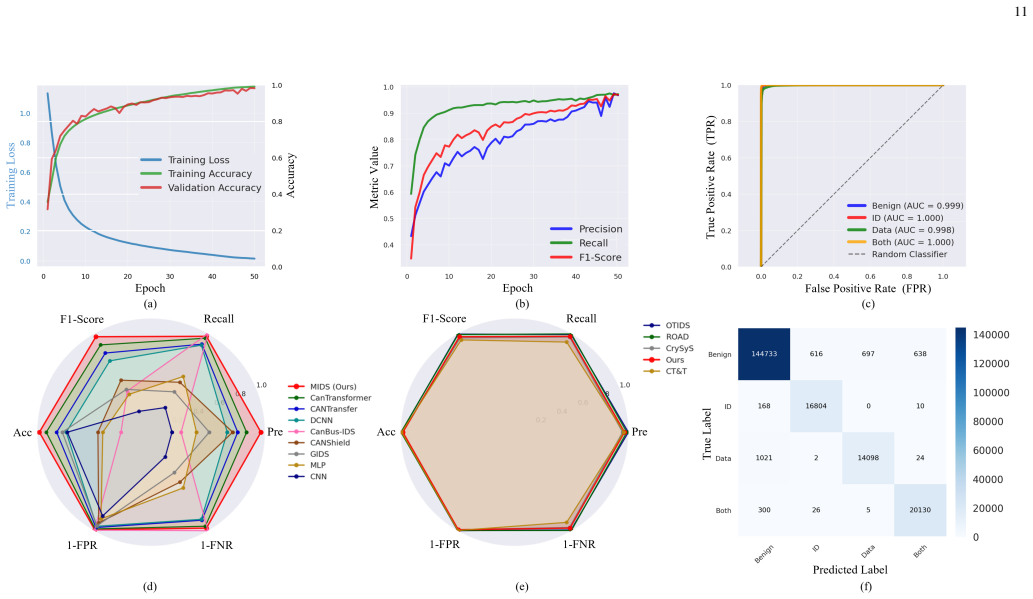
MIDS attains an F1 of 96.94 percent on a Tesla-collected dataset containing 54 masquerade variants and reaches F1 scores between 93.70 percent and 99.61 percent on four public benchmarks, exceeding the strongest reproducible baseline by up to 13.94 percentage points while sustaining inference latency low enough for real-time onboard use.
What carries the argument
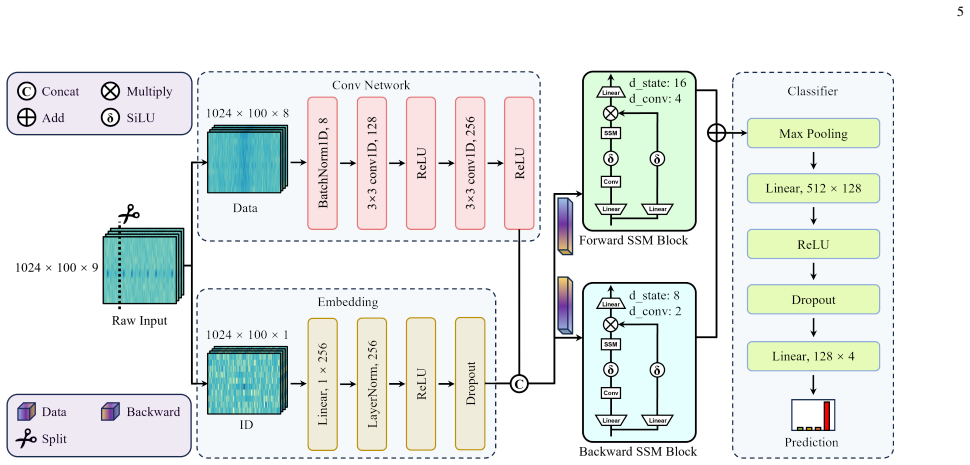
Dual-stream bidirectional selective state-space model that processes CAN identifiers and payloads in parallel and reconstructs their joint temporal semantics.
If this is right
- Masquerade attacks that preserve traffic periodicity become detectable without inter-arrival statistics.
- A single architecture handles both masquerade and fabrication-style injection attacks across multiple datasets.
- Inference latency of roughly 1.1 ms leaves headroom for real-time deployment inside vehicles.
- Performance gains of 8 to 14 percentage points over prior methods hold under a unified 5-fold evaluation protocol.
Where Pith is reading between the lines
- If the approach generalizes, vehicle security systems could move from post-facto logging to continuous in-situ detection of internal substitutions.
- The dual-stream design may transfer to other in-vehicle buses that also lack authentication.
- Training exclusively on synthesized attacks leaves open the question of whether models must be fine-tuned on traces from actual compromised hardware.
Load-bearing premise
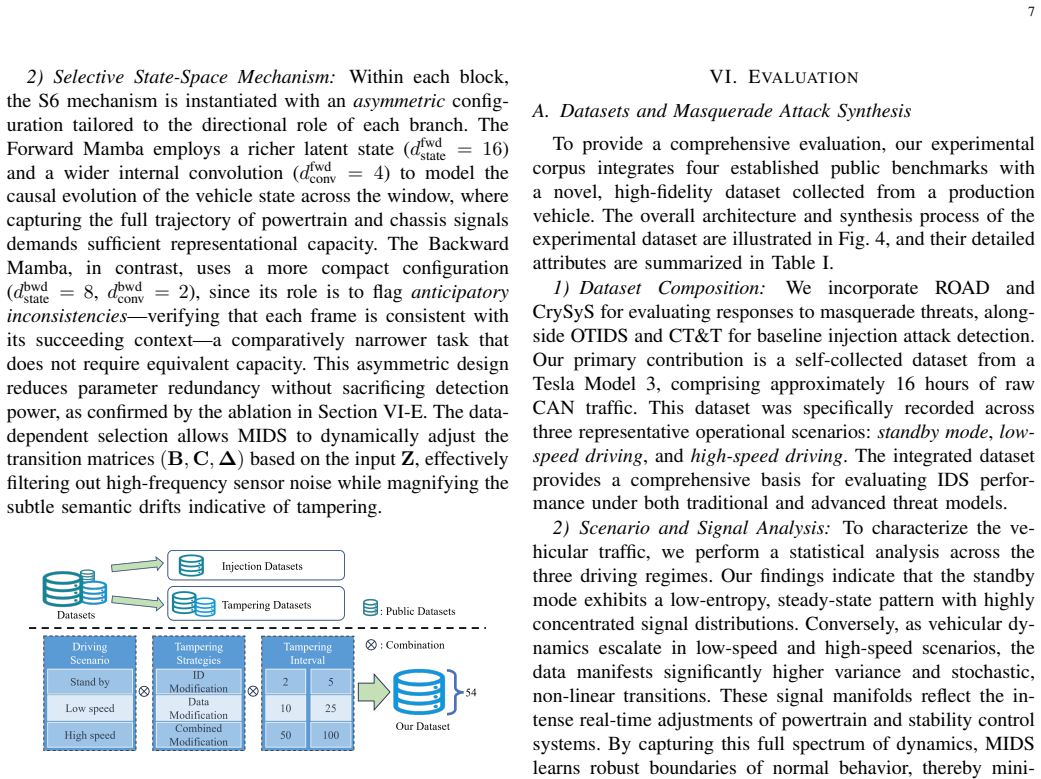
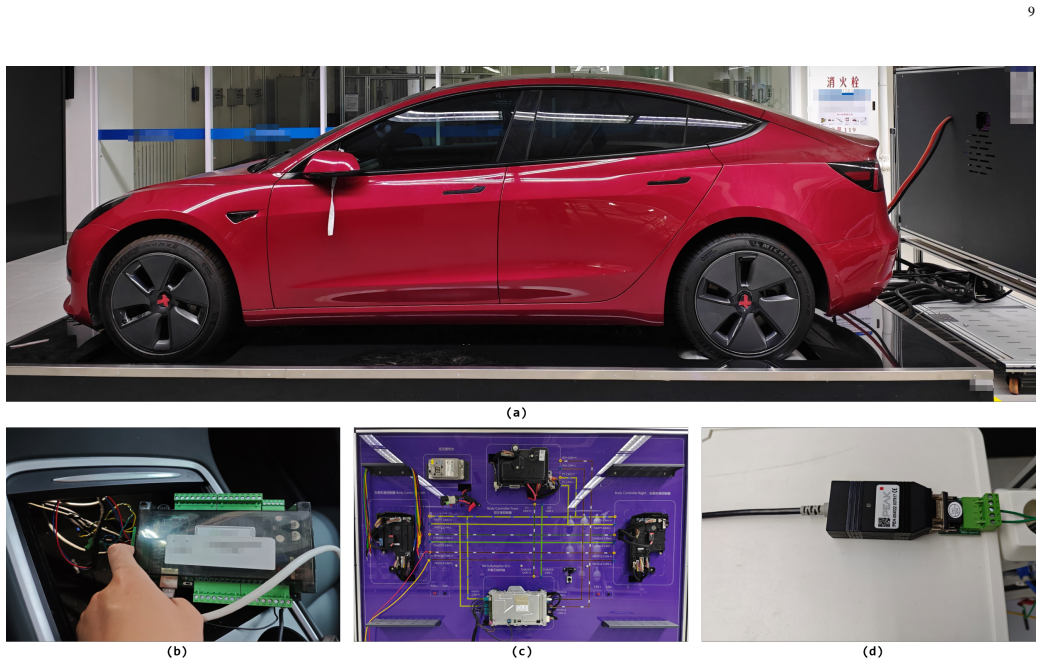
The 54 synthesized masquerade variants and the CAN traces gathered from one Tesla Model 3 across three driving regimes are representative of real-world stealthy attacks.
What would settle it
Running MIDS on CAN traffic recorded from a different vehicle model or on attacks produced by physically compromised ECUs and observing whether F1 falls below 90 percent would test the central claim.
Figures
read the original abstract
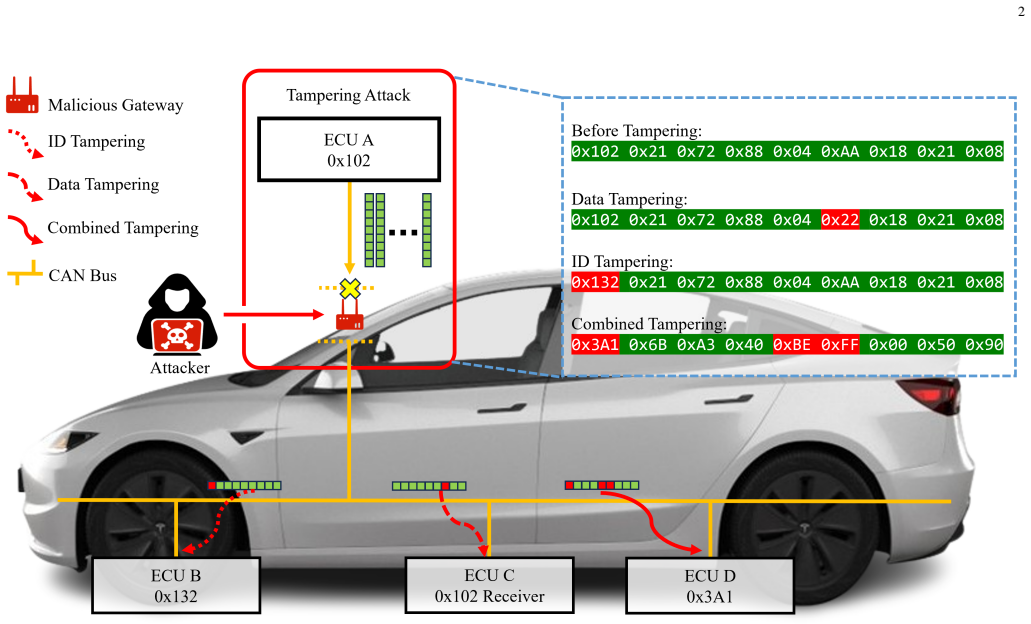
The Controller Area Network (CAN) protocol is the primary communication standard for Electronic Control Units (ECUs) in modern vehicles, but its lack of encryption and authentication exposes it to a range of security threats. Existing intrusion detection systems are largely tuned to fabrication-style attacks (DoS, fuzzing, ID spoofing realised by frame injection), in which detection signals such as per-ID inter-arrival statistics are readily available. We instead address the harder \emph{masquerade} setting~\cite{b37}, in which an internal adversary substitutes a legitimate frame in-situ at its original transmission slot, preserving traffic periodicity and rendering traffic-statistic defences ineffective. We propose the Mamba Intrusion Detection System (MIDS), an innovative dual-stream framework that processes CAN identifiers and payloads in parallel and reconstructs their joint temporal semantics through bidirectional selective state-space modelling. To evaluate MIDS, we collected over 100 million CAN frames from a physical Tesla Model 3 across three driving regimes and synthesised 54 masquerade attack variants spanning ID-only, data-only, and combined modifications. MIDS attains an F1 of 96.94\% on this dataset, exceeding the strongest reproducible baseline by more than 8 percentage points, while sustaining a 1.147~ms single-window inference latency -- ample headroom for real-time onboard deployment. To verify generalisation, we further evaluate MIDS on four public benchmarks (ROAD, CrySyS, OTIDS, CT\&T) covering both masquerade and injection scenarios; MIDS attains F1 from 93.70\% to 99.61\%, outperforming the strongest of eight reproduced baselines by up to 13.94 percentage points under a unified 5-fold protocol.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes MIDS, a dual-stream bidirectional Mamba framework for detecting masquerade and tampering attacks on CAN bus. It collects >100M frames from a physical Tesla Model 3 across three regimes, synthesizes 54 attack variants via post-hoc ID/payload substitution that preserves inter-arrival times, and reports F1=96.94% (exceeding the strongest baseline by >8pp) with 1.147ms inference latency. Generalization is tested on four public benchmarks (ROAD, CrySyS, OTIDS, CT&T) under 5-fold CV, yielding F1 93.70–99.61% and outperforming eight reproduced baselines by up to 13.94pp.
Significance. If the attack synthesis is representative, MIDS would advance detection of stealthy masquerade attacks that evade traffic-statistic methods by exploiting joint temporal semantics. Strengths include multi-benchmark evaluation, reproduction of eight baselines, and explicit latency measurements supporting real-time use. The work is empirically grounded but hinges on the validity of the synthesized data.
major comments (3)
- [Abstract] Abstract and attack-synthesis description: masquerade variants are generated by post-hoc substitution of ID or payload bytes while preserving nominal inter-arrival times. This procedure does not enforce the constraints a genuine internal attacker must satisfy—seizing the exact transmission slot of a live ECU and keeping the vehicle state machine consistent. Consequently the reported F1 gains may reflect synthesis artifacts rather than the bidirectional Mamba’s claimed exploitation of joint temporal semantics.
- [Methods / Evaluation] Model and evaluation sections: the manuscript supplies no details on the precise bidirectional Mamba architecture (state dimension, selective mechanism parameters, dual-stream fusion), training procedure (optimizer, loss, regularization, early stopping), hyper-parameter search, or statistical validation (confidence intervals, multiple random seeds). These omissions are load-bearing for the central claim of >8pp and up to 13.94pp improvements.
- [Evaluation on public benchmarks] Public-benchmark evaluation: the unified 5-fold protocol on ROAD, CrySyS, OTIDS and CT&T does not mitigate the generalization risk if those corpora were also constructed by comparable post-hoc substitution; the same synthesis-specific artifacts could be learned across all test sets.
minor comments (2)
- [Abstract] Clarify whether the 1.147 ms latency figure is measured on the target embedded hardware or a desktop GPU, and whether it includes preprocessing.
- [Dataset construction] Provide the exact definition of the 54 attack variants (which IDs, which payload bytes, how many frames per variant) in a table or supplementary material.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting concerns about attack synthesis realism, missing methodological details, and potential generalization issues across benchmarks. We address each point below with our responses and planned revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract and attack-synthesis description: masquerade variants are generated by post-hoc substitution of ID or payload bytes while preserving nominal inter-arrival times. This procedure does not enforce the constraints a genuine internal attacker must satisfy—seizing the exact transmission slot of a live ECU and keeping the vehicle state machine consistent. Consequently the reported F1 gains may reflect synthesis artifacts rather than the bidirectional Mamba’s claimed exploitation of joint temporal semantics.
Authors: We agree this is a valid limitation of post-hoc synthesis, which is standard in CAN IDS literature but cannot fully replicate ECU state consistency. Our approach focuses on preserving inter-arrival times to emulate masquerade effects on the bus, and the performance margin over baselines (which use the same data) indicates the model exploits temporal semantics beyond artifacts. We will add an explicit limitations subsection discussing attack model assumptions and synthesis caveats. revision: partial
-
Referee: [Methods / Evaluation] Model and evaluation sections: the manuscript supplies no details on the precise bidirectional Mamba architecture (state dimension, selective mechanism parameters, dual-stream fusion), training procedure (optimizer, loss, regularization, early stopping), hyper-parameter search, or statistical validation (confidence intervals, multiple random seeds). These omissions are load-bearing for the central claim of >8pp and up to 13.94pp improvements.
Authors: These omissions are indeed critical for reproducibility. The revised manuscript will include full architecture specifications (state dimension, selective parameters, fusion method), training details (optimizer, loss, regularization, early stopping), hyperparameter search procedure, and statistical validation with multiple seeds and confidence intervals to substantiate the reported gains. revision: yes
-
Referee: [Evaluation on public benchmarks] Public-benchmark evaluation: the unified 5-fold protocol on ROAD, CrySyS, OTIDS and CT&T does not mitigate the generalization risk if those corpora were also constructed by comparable post-hoc substitution; the same synthesis-specific artifacts could be learned across all test sets.
Authors: We note that ROAD includes real attack traces from physical testbeds, while others vary in construction. The consistent outperformance across these datasets with different attack types supports broader generalization. We will expand the evaluation section to detail each benchmark's attack synthesis method and add discussion of potential shared artifacts as a limitation. revision: partial
Circularity Check
No circularity: empirical evaluation on external datasets and baselines
full rationale
The paper reports standard supervised ML results: a bidirectional Mamba model is trained on CAN traces (Tesla-collected plus synthesized attacks) and evaluated via F1 against eight reproduced baselines under 5-fold cross-validation on four public benchmarks. No equations, first-principles derivations, or parameter-fitting steps are presented that reduce to the target metric by construction. The masquerade-attack synthesis procedure is described as an input to the evaluation protocol rather than a fitted output renamed as a prediction. No self-citation chains are invoked to justify uniqueness or load-bearing premises. The central claims therefore remain independent empirical measurements.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Fingerprinting electronic control units for vehicle intrusion detection,
K.-T. Cho and K. G. Shin, “Fingerprinting electronic control units for vehicle intrusion detection,” in25th USENIX Security Symposium (USENIX Security 16). Austin, TX: USENIX Association, Aug. 2016, pp. 911–927. [Online]. Available: https://www.usenix.org/conference/us enixsecurity16/technical-sessions/presentation/cho
2016
-
[2]
Cyber-security for the controller area network (CAN) communication protocol,
C. Lin and A. L. Sangiovanni-Vincentelli, “Cyber-security for the controller area network (CAN) communication protocol,” in2012 ASE International Conference on Cyber Security, Alexandria, VA, USA, December 14-16, 2012. IEEE Computer Society, 2012, pp. 1–7. [Online]. Available: https://doi.org/10.1109/CyberSecurity.2012.7
-
[3]
Vecure: A practical security framework to protect the CAN bus of vehicles,
Q. Wang and S. Sawhney, “Vecure: A practical security framework to protect the CAN bus of vehicles,” in4th International Conference on the Internet of Things, IOT 2014, Cambridge, MA, USA, October 6-8, 2014. IEEE, 2014, pp. 13–18. [Online]. Available: https://doi.org/10.1109/IOT.2014.7030108
-
[4]
Comprehensive experimental analyses of automotive attack surfaces,
S. Checkoway, D. McCoy, B. Kantor, D. Anderson, H. Shacham, S. Savage, K. Koscher, A. Czeskis, F. Roesner, and T. Kohno, “Comprehensive experimental analyses of automotive attack surfaces,” in20th USENIX Security Symposium (USENIX Security 11). San Francisco, CA: USENIX Association, Aug. 2011. [Online]. Available: https://www.usenix.org/conference/usenix-...
2011
-
[5]
A study on a secure protocol against tampering and replay attacks focused on data field of CAN,
S. Araki, A. Tashiro, K. Kakizaki, and S. Uehara, “A study on a secure protocol against tampering and replay attacks focused on data field of CAN,” in2017 IEEE International Conference on Consumer Electronics - Taiwan (ICCE-TW), 2017, pp. 247–248
2017
-
[6]
In-vehicle CAN bus tampering attacks detection for connected and autonomous vehicles using an improved isolation forest method,
X. Duan, H. Yan, D. Tian, J. Zhou, J. Su, and W. Hao, “In-vehicle CAN bus tampering attacks detection for connected and autonomous vehicles using an improved isolation forest method,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 2, pp. 2122–2134, 2023
2023
-
[7]
A survey of remote automotive attack surfaces,
C. Miller and C. Valasek, “A survey of remote automotive attack surfaces,” inIOActive Labs Research, 2014
2014
-
[8]
Divacan: Detecting in-vehicle intrusion attacks on a controller area network using ensemble learning,
M. H. Khan, A. R. Javed, Z. Iqbal, M. Asim, and A. I. Awad, “Divacan: Detecting in-vehicle intrusion attacks on a controller area network using ensemble learning,”Comput. Secur., vol. 139, p. 103712,
-
[9]
Available: https://doi.org/10.1016/j.cose.2024.103712
[Online]. Available: https://doi.org/10.1016/j.cose.2024.103712
-
[10]
Can signal extraction and translation dataset
H. M. Song and H. K. Kim, “Can signal extraction and translation dataset.” [Online]. Available: https://ocslab.hksecurity.net/Datasets/can -signal-extraction-and-translation-dataset
-
[11]
M. Jedh, L. B. Othmane, N. Ahmed, and B. K. Bhargava, “Detection of message injection attacks onto the CAN bus using similarity of suc- cessive messages-sequence graphs,”CoRR, vol. abs/2104.03763, 2021
arXiv 2021
-
[12]
Intrusion detection system based on the analysis of time intervals of CAN messages for in-vehicle network,
H. M. Song, H. R. Kim, and H. K. Kim, “Intrusion detection system based on the analysis of time intervals of CAN messages for in-vehicle network,” in2016 International Conference on Information Networking, ICOIN 2016, Kota Kinabalu, Malaysia, January 13-15, 2016. IEEE Computer Society, 2016, pp. 63–68
2016
-
[13]
Efficient intrusion detection with bloom filtering in controller area networks,
B. Groza and P. Murvay, “Efficient intrusion detection with bloom filtering in controller area networks,”IEEE Trans. Inf. Forensics Secur., vol. 14, no. 4, pp. 1037–1051, 2019
2019
-
[14]
Development of a man-in- the-middle attack device for the CAN bus,
A. Gazdag, C. Ferenczi, and L. Butty ´an, “Development of a man-in- the-middle attack device for the CAN bus,” inProceedings of the 1st Conference on Information Technology and Data Science, ser. CEUR Workshop Proceedings, vol. 2874, Nov 6–8 2020. [Online]. Available: http://ceur-ws.org/V ol-2874/paper11.pdf
2020
-
[15]
CrySyS dataset of CAN traffic logs containing fabrication and masquerade attacks,
A. Gazdag, R. Ferenc, and L. Butty ´an, “CrySyS dataset of CAN traffic logs containing fabrication and masquerade attacks,”Scientific Data, vol. 10, 2023
2023
-
[16]
Poster: Real ORNL automotive dynamometer (ROAD) CAN intrusion dataset,
S. C. Hollifield, M. E. Verma, M. D. Iannacone, R. A. Bridges, B. Kay, and F. L. Combs, “Poster: Real ORNL automotive dynamometer (ROAD) CAN intrusion dataset,” 2021. 14
2021
-
[17]
OTIDS: A novel intrusion detection system for in-vehicle network by using remote frame,
H. Lee, S. H. Jeong, and H. K. Kim, “OTIDS: A novel intrusion detection system for in-vehicle network by using remote frame,” in15th Annual Conference on Privacy, Security and Trust, PST 2017, Calgary, AB, Canada, August 28-30, 2017. IEEE Computer Society, 2017, pp. 57–66
2017
-
[18]
can-train-and-test: A new can intrusion detection dataset,
B. Lampe and W. Meng, “can-train-and-test: A new can intrusion detection dataset,” in2023 IEEE 98th Vehicular Technology Conference (VTC2023-Fall), 2023, pp. 1–7
2023
-
[19]
Intrusion detection system using deep neural network for in-vehicle network security,
M.-J. Kang and J.-W. Kang, “Intrusion detection system using deep neural network for in-vehicle network security,”PLoS ONE, vol. 11, no. 6, p. e0155781, 2016
2016
-
[20]
GIDS: GAN based intrusion detection system for in-vehicle network,
E. Seo, H. M. Song, and H. K. Kim, “GIDS: GAN based intrusion detection system for in-vehicle network,”CoRR, vol. abs/1907.07377, 2019
Pith/arXiv arXiv 1907
-
[21]
The vehicle data value chain as a lightweight model to describe digital vehicle services,
C. Kaiser, A. Festl, G. Pucher, M. Fellmann, and A. Stocker, “The vehicle data value chain as a lightweight model to describe digital vehicle services,” inProceedings of the 15th International Conference on Web Information Systems and Technologies, WEBIST 2019, Vienna, Austria, September 18-20, 2019. ScitePress, 2019, pp. 68–79
2019
-
[22]
Detection of missing can messages through inter-arrival time analysis,
D. Stabili and M. Marchetti, “Detection of missing can messages through inter-arrival time analysis,” in2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), 2019, pp. 1–7
2019
-
[23]
Automotive controller area network (can) bus intrusion dataset v2,
G. Dupont, A. Lekidis, J. I. den Hartog, and S. Etalle, “Automotive controller area network (can) bus intrusion dataset v2,” in4TU.Centre for Research Data, 2019, p. 14. [Online]. Available: https://doi.org/10 .4121/UUID:B74B4928-C377-4585-9432-2004DFA20A5D
2019
-
[24]
Intrusion detection in can bus,
M. Sami, “Intrusion detection in can bus,” 2019
2019
-
[25]
Recan – dataset for reverse engi- neering of controller area networks,
M. Zago, S. Longari, A. Tricarico, M. Carminati, M. Gil P ´erez, G. Mart ´ınez P´erez, and S. Zanero, “Recan – dataset for reverse engi- neering of controller area networks,”Data in Brief, vol. 29, p. 105149, 2020
2020
-
[26]
CANet: An unsupervised intrusion detection system for high dimensional can bus data,
M. Hanselmann, T. Strauss, K. Dormann, and H. Ulmer, “CANet: An unsupervised intrusion detection system for high dimensional can bus data,”IEEE Access, vol. 8, pp. 58 194–58 205, 2020
2020
-
[27]
Car hacking and defense competition on in-vehicle network,
H. Kang, B. I. Kwak, Y . H. Lee, H. Lee, H. Lee, and H. K. Kim, “Car hacking and defense competition on in-vehicle network,” inWorkshop on Automotive and Autonomous Vehicle Security (AutoSec), vol. 2021, 2021, p. 25
2021
-
[28]
Can bus dataset collected from a heavy-duty truck,
U. of Turku, “Can bus dataset collected from a heavy-duty truck,” 5
-
[29]
Available: https://doi.org/10.23729/3160254e-85e9-426 8-a636-5b3e54091706
[Online]. Available: https://doi.org/10.23729/3160254e-85e9-426 8-a636-5b3e54091706
-
[30]
DAGA: Detecting attacks to in-vehicle networks via n-gram analysis,
D. Stabili, L. Ferretti, M. Andreolini, and M. Marchetti, “DAGA: Detecting attacks to in-vehicle networks via n-gram analysis,”IEEE Trans. Veh. Technol., vol. 71, no. 11, pp. 11 540–11 554, 2022
2022
-
[31]
Performance comparison of timing-based anomaly detectors for controller area network: A reproducible study,
F. Pollicino, D. Stabili, and M. Marchetti, “Performance comparison of timing-based anomaly detectors for controller area network: A reproducible study,”ACM Trans. Cyber-Phys. Syst., vol. 8, no. 2, May 2024
2024
-
[32]
Adventures in automotive networks and control units,
C. Miller and C. Valasek, “Adventures in automotive networks and control units,” 2013
2013
-
[33]
Entropy-based anomaly detection for in-vehicle networks,
M. M ¨uter and N. Asaj, “Entropy-based anomaly detection for in-vehicle networks,” inIEEE Intelligent Vehicles Symposium (IV), 2011, Baden- Baden, Germany, June 5-9, 2011. IEEE, 2011, pp. 1110–1115
2011
-
[34]
Evaluation of anomaly detection for in-vehicle networks through information- theoretic algorithms,
M. Marchetti, D. Stabili, A. Guido, and M. Colajanni, “Evaluation of anomaly detection for in-vehicle networks through information- theoretic algorithms,” in2nd IEEE International Forum on Research and Technologies for Society and Industry Leveraging a better tomorrow, RTSI 2016, Bologna, Italy, September 7-9, 2016. IEEE, 2016, pp. 1–6
2016
-
[35]
Source identification using signal character- istics in controller area networks,
P. Murvay and B. Groza, “Source identification using signal character- istics in controller area networks,”IEEE Signal Process. Lett., vol. 21, no. 4, pp. 395–399, 2014
2014
-
[36]
Identifying ecus using inimitable characteristics of signals in controller area networks,
W. Choi, H. J. Jo, S. Woo, J. Y . Chun, J. Park, and D. H. Lee, “Identifying ecus using inimitable characteristics of signals in controller area networks,”IEEE Trans. Veh. Technol., vol. 67, no. 6, pp. 4757– 4770, 2018
2018
-
[37]
V oltageIDS: Low- level communication characteristics for automotive intrusion detection system,
W. Choi, K. Joo, H. J. Jo, M. C. Park, and D. H. Lee, “V oltageIDS: Low- level communication characteristics for automotive intrusion detection system,”IEEE Trans. Inf. Forensics Secur., vol. 13, no. 8, pp. 2114– 2129, 2018
2018
-
[38]
Analysis of ID sequences similarity using DTW in intrusion detection for CAN bus,
H. Sun, M. Sun, J. Weng, and Z. Liu, “Analysis of ID sequences similarity using DTW in intrusion detection for CAN bus,”IEEE Transactions on Vehicular Technology, vol. 71, no. 10, pp. 10 426– 10 441, 2022
2022
-
[39]
TOW-IDS: Intrusion detection system based on three overlapped wavelets for automotive ethernet,
M. L. Han, B. I. Kwak, and H. K. Kim, “TOW-IDS: Intrusion detection system based on three overlapped wavelets for automotive ethernet,” IEEE Trans. Inf. Forensics Secur., vol. 18, pp. 411–422, 2023
2023
-
[40]
Anomaly detection in au- tomobile control network data with long short-term memory networks,
A. Taylor, S. P. Leblanc, and N. Japkowicz, “Anomaly detection in au- tomobile control network data with long short-term memory networks,” in2016 IEEE International Conference on Data Science and Advanced Analytics, DSAA 2016, Montreal, QC, Canada, October 17-19, 2016. IEEE, 2016, pp. 130–139
2016
-
[41]
Federated-LSTM based network intrusion detection method for intelligent connected vehi- cles,
T. Yu, G. Hua, H. Wang, J. Yang, and J. Hu, “Federated-LSTM based network intrusion detection method for intelligent connected vehi- cles,” inICC 2022-IEEE International Conference on Communications. IEEE, 2022, pp. 4324–4329
2022
-
[42]
IIDS: Intelligent intrusion detection system for sustainable development in autonomous vehicles,
S. Anbalagan, G. Raja, S. Gurumoorthy, R. D. Suresh, and K. Dev, “IIDS: Intelligent intrusion detection system for sustainable development in autonomous vehicles,”IEEE Transactions on Intelligent Transporta- tion Systems, vol. 24, no. 12, pp. 15 866–15 875, 2023
2023
-
[43]
An effective in-vehicle CAN bus intrusion detection system using CNN deep learning approach,
M. D. Hossain, H. Inoue, H. Ochiai, D. Fall, and Y . Kadobayashi, “An effective in-vehicle CAN bus intrusion detection system using CNN deep learning approach,” inGLOBECOM 2020 - 2020 IEEE Global Communications Conference. IEEE, 2020, pp. 1–6
2020
-
[44]
CANintelliIDS: Detecting in-vehicle intrusion attacks on a controller area network using CNN and attention-based GRU,
A. R. Javed, S. Ur Rehman, M. U. Khan, M. Alazab, and T. Reddy, “CANintelliIDS: Detecting in-vehicle intrusion attacks on a controller area network using CNN and attention-based GRU,”IEEE Transactions on Network Science and Engineering, vol. 8, no. 2, pp. 1456–1466, 2021
2021
-
[45]
Real-time zero-day intrusion detection system for automotive controller area network on FPGAs,
S. Khandelwal and S. Shreejith, “Real-time zero-day intrusion detection system for automotive controller area network on FPGAs,” in2023 IEEE 34th International Conference on Application-specific Systems, Architectures and Processors (ASAP), 2023, pp. 139–146
2023
-
[46]
BIDS: An efficient intrusion detection system for in-vehicle networks using a two-stage binarised neural network on low-cost FPGA,
A. Rangsikunpum, S. Amiri, and L. Ost, “BIDS: An efficient intrusion detection system for in-vehicle networks using a two-stage binarised neural network on low-cost FPGA,”Journal of Systems Architecture, 2024
2024
-
[47]
G-IDCS: Graph-based intrusion detection and classification system for CAN protocol,
S. B. Park, H. J. Jo, and D. H. Lee, “G-IDCS: Graph-based intrusion detection and classification system for CAN protocol,”IEEE Access, vol. 11, pp. 39 213–39 227, 2023
2023
-
[48]
A GRU-based lightweight system for CAN intrusion detection in real time,
H. Ma, J. Cao, B. Mi, D. Huang, Y . Liu, and S. Li, “A GRU-based lightweight system for CAN intrusion detection in real time,”Security and Communication Networks, vol. 2022, no. 1, p. 5827056, 2022
2022
-
[49]
Detecting attacks to internal vehicle networks through Hamming distance,
D. Stabili, M. Marchetti, and M. Colajanni, “Detecting attacks to internal vehicle networks through Hamming distance,” in2017 AEIT International Annual Conference, 2017, pp. 1–6
2017
-
[50]
CANtropy: Time series feature extraction-based intrusion detection systems for controller area networks,
M. H. Shahriar, W. Lou, and Y . T. Hou, “CANtropy: Time series feature extraction-based intrusion detection systems for controller area networks,” inProceedings of the VehicleSec Workshop, 2023
2023
-
[51]
Specification of secure onboard communica- tion protocol (SecOC),
AUTOSAR Consortium, “Specification of secure onboard communica- tion protocol (SecOC),” AUTOSAR Standard, Release R23-11, 2023
2023
-
[52]
ZBCAN: A zero-byte CAN defense system,
K. Serag, R. Bhatia, A. Faqih, M. O. Ozmen, V . Kumar, Z. B. Celik, and D. Xu, “ZBCAN: A zero-byte CAN defense system,” in32nd USENIX Security Symposium (USENIX Security 23), 2023
2023
-
[53]
Efficiently modeling long sequences with structured state spaces,
A. Gu, K. Goel, and C. R ´e, “Efficiently modeling long sequences with structured state spaces,” inThe Tenth International Conference on Learning Representations, ICLR 2022, Virtual Event, April 25-29, 2022. OpenReview.net, 2022. [Online]. Available: https: //openreview.net/forum?id=uYLFoz1vlAC
2022
-
[54]
Mamba: Linear-Time Sequence Modeling with Selective State Spaces
A. Gu and T. Dao, “Mamba: Linear-time sequence modeling with selective state spaces,”CoRR, vol. abs/2312.00752, 2023. [Online]. Available: https://doi.org/10.48550/arXiv.2312.00752
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2312.00752 2023
-
[55]
GIDS: GAN based intrusion detection system for in-vehicle network,
E. Seo, H. M. Song, and H. K. Kim, “GIDS: GAN based intrusion detection system for in-vehicle network,” in16th Annual Conference on Privacy, Security and Trust, PST 2018, Belfast, Northern Ireland, UK, August 28-30, 2018. IEEE Computer Society, 2018, pp. 1–6
2018
-
[56]
CAN- Shield: Deep-learning-based intrusion detection framework for controller area networks at the signal level,
M. H. Shahriar, Y . Xiao, P. Moriano, W. Lou, and Y . T. Hou, “CAN- Shield: Deep-learning-based intrusion detection framework for controller area networks at the signal level,”IEEE Internet of Things Journal, vol. 10, no. 24, pp. 22 111–22 127, 2023
2023
-
[57]
Detecting in-vehicle intrusion via semi- supervised learning-based convolutional adversarial autoencoders,
T. Hoang and D. Kim, “Detecting in-vehicle intrusion via semi- supervised learning-based convolutional adversarial autoencoders,”Veh. Commun., vol. 38, p. 100520, 2022
2022
-
[58]
In-vehicle network intrusion detection using deep convolutional neural network,
H. M. Song, J. Woo, and H. K. Kim, “In-vehicle network intrusion detection using deep convolutional neural network,”Veh. Commun., vol. 21, 2020
2020
-
[59]
CANTransfer: transfer learning based intrusion detection on a controller area network using convolutional LSTM network,
S. Tariq, S. Lee, and S. S. Woo, “CANTransfer: transfer learning based intrusion detection on a controller area network using convolutional LSTM network,” inSAC ’20: The 35th ACM/SIGAPP Symposium on Applied Computing, online event, [Brno, Czech Republic], March 30 - April 3, 2020. ACM, 2020, pp. 1048–1055
2020
-
[60]
Intrusion detection using transformer in controller area network,
H. Jo and D. Kim, “Intrusion detection using transformer in controller area network,”IEEE Access, vol. 12, pp. 121 932–121 946, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.