A Relaxed Quadratic-Program-based Framework for Trajectory Tracking of Unicycle Robots with Singularity Avoidance
Pith reviewed 2026-06-26 08:06 UTC · model grok-4.3
The pith
Reformulating dynamic feedback linearization as an equality-constrained QP with a slack variable keeps unicycle trajectory tracking feasible at zero velocity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that DFL constraints can be recast as an equality-constrained QP augmented by a slack variable; this reformulation guarantees feasibility for every state and every reference trajectory, including those that pass through zero linear velocity, while the closed-loop feedback remains locally Lipschitz continuous and the singular configuration is avoided for a broad class of references.
What carries the argument
An equality-constrained quadratic program that incorporates a slack variable to relax the original DFL matching conditions.
If this is right
- The QP remains feasible at every instant, including when linear velocity is zero.
- The feedback law stays locally Lipschitz continuous.
- Singular points are avoided for a large set of reference paths.
- The method applies directly to stop-and-reverse maneuvers on real hardware.
Where Pith is reading between the lines
- The same slack-variable relaxation might be applied to other nonholonomic vehicle models that suffer velocity-dependent singularities.
- Tunable parameters in the QP could be scheduled online to trade tracking accuracy against singularity margin on the fly.
- Because the QP is equality-constrained, standard solvers can be warm-started from the previous time step for faster real-time execution.
Load-bearing premise
Adding slack variables and tunable parameters is sufficient to avoid the singular configuration while preserving local Lipschitz continuity of the feedback law for the targeted class of reference trajectories.
What would settle it
Run the closed-loop system on a reference trajectory that reaches exactly zero velocity and requires an immediate direction reversal; if the optimization becomes infeasible or the tracking error grows unbounded, the central claim fails.
Figures
read the original abstract
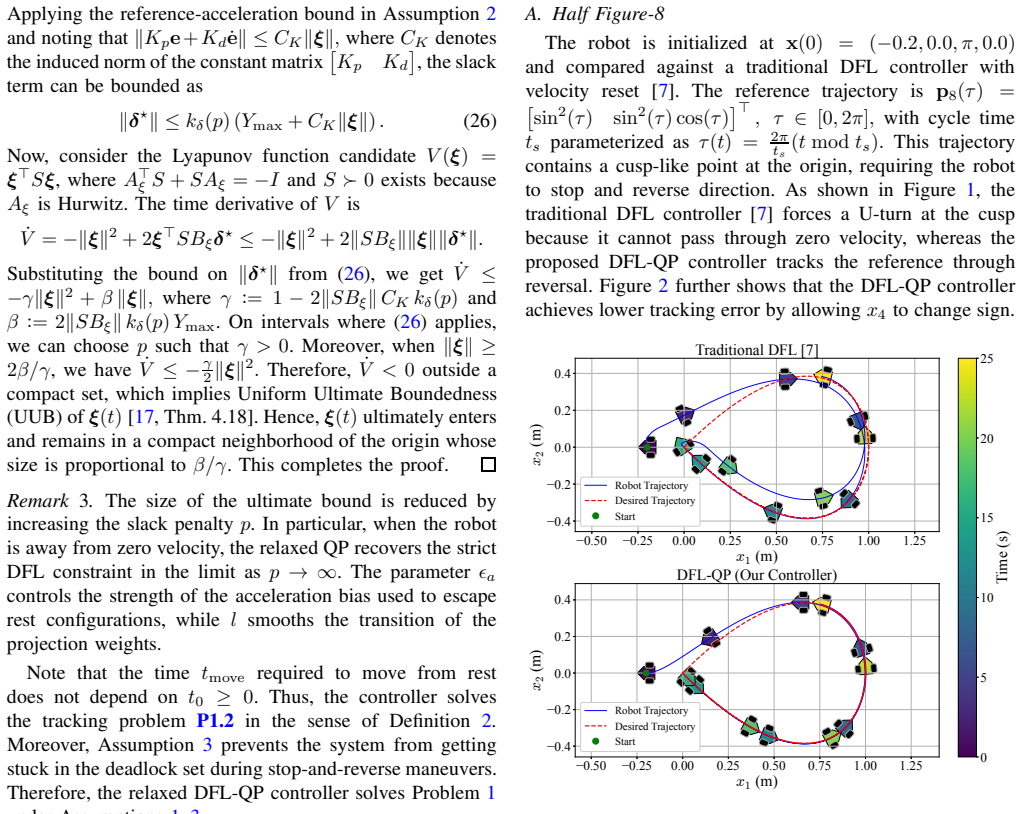
Dynamic feedback linearization (DFL) is a classical technique for trajectory tracking of unicycle-type mobile robots, but the resulting DFL-based controller becomes singular when the linear velocity vanishes, rendering standard DFL-based controllers unsuitable for stop-and-reverse maneuvers. This paper proposes a quadratic-program (QP)-based optimal control framework that avoids this singularity, while establishing local Lipschitz continuity of the resulting feedback law. Our approach reformulates the DFL constraints as an equality-constrained QP with a slack variable, ensuring feasibility for all states and reference signals, including at points where the robot's velocity vanishes. By introducing slack variables and tunable parameters, we demonstrate that the singular configuration can be avoided for a large class of reference trajectories. The effectiveness of the proposed approach for trajectory tracking is demonstrated through ROS 2-Gazebo simulations on a TurtleBot3 Waffle robot. The code is available at https://gradslab.github.io/DFL_QP_Unicycle/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a QP-based optimal control framework for unicycle trajectory tracking that reformulates DFL constraints as an equality-constrained QP augmented with a slack variable. This is claimed to guarantee feasibility for all states and references, including at zero velocity, while preserving local Lipschitz continuity of the resulting feedback law through tunable parameters. Effectiveness is shown via ROS 2-Gazebo simulations on a TurtleBot3, with code released.
Significance. If the local Lipschitz continuity and feasibility claims hold under the stated conditions, the framework offers a practical extension of DFL methods that enables stop-and-reverse maneuvers without singularity issues. The public code release supports reproducibility, which is a strength for control applications in robotics.
major comments (2)
- [Section establishing local Lipschitz continuity of the feedback law] The central claim of local Lipschitz continuity of the QP feedback law (when the slack activates near v=0) lacks explicit verification of the required regularity conditions on the KKT system. The DFL matrix loses rank at those points, and the analysis of active-set transitions, LICQ, and strong second-order sufficiency is not provided with bounds on the Lipschitz constant.
- [Reformulation of DFL constraints as equality-constrained QP] The feasibility guarantee is achieved by construction via the slack, but the dependence on tunable parameters for avoiding singularities across a 'large class' of references requires explicit conditions or bounds; without them the result risks being sensitive to post-hoc tuning.
minor comments (2)
- [Abstract and introduction] Clarify the precise class of reference trajectories for which the singularity avoidance holds, as the current phrasing is vague.
- [Simulation results] The simulation section would benefit from explicit reporting of the chosen tunable parameter values and any sensitivity analysis.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the recommendation for major revision. We address each major comment below, agreeing that additional explicit analysis is warranted to strengthen the claims on Lipschitz continuity and parameter bounds.
read point-by-point responses
-
Referee: [Section establishing local Lipschitz continuity of the feedback law] The central claim of local Lipschitz continuity of the QP feedback law (when the slack activates near v=0) lacks explicit verification of the required regularity conditions on the KKT system. The DFL matrix loses rank at those points, and the analysis of active-set transitions, LICQ, and strong second-order sufficiency is not provided with bounds on the Lipschitz constant.
Authors: We acknowledge that while the manuscript invokes standard results on the local Lipschitz continuity of QP solution maps (under strict complementarity and nondegeneracy away from v=0), it does not explicitly verify LICQ, strong second-order sufficiency, or bound the Lipschitz constant across active-set transitions when the DFL matrix rank drops and the slack activates. In the revision we will add a dedicated lemma and proof subsection supplying these regularity conditions together with an explicit (parameter-dependent) Lipschitz bound. revision: yes
-
Referee: [Reformulation of DFL constraints as equality-constrained QP] The feasibility guarantee is achieved by construction via the slack, but the dependence on tunable parameters for avoiding singularities across a 'large class' of references requires explicit conditions or bounds; without them the result risks being sensitive to post-hoc tuning.
Authors: Feasibility is indeed guaranteed by construction through the slack variable. However, the manuscript currently illustrates singularity avoidance for a broad but informally characterized set of references via examples and simulations. We agree that explicit sufficient conditions on the tunable weights (relating them to reference velocity and curvature bounds) are needed. The revision will include a theorem stating such conditions, thereby removing reliance on post-hoc tuning. revision: yes
Circularity Check
No circularity: QP reformulation of DFL is a standard relaxation, independent of inputs
full rationale
The derivation introduces an equality-constrained QP with slack to relax DFL singularity constraints at v=0. This is a direct construction from standard QP theory and DFL equations, not a redefinition of the target property (Lipschitz continuity or feasibility) in terms of itself. No fitted parameters are renamed as predictions, no self-citation chains are load-bearing, and no ansatz or uniqueness theorem is smuggled in. The framework is self-contained against external QP solvers and DFL literature; the central claim does not reduce to its own inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- tunable parameters
axioms (1)
- domain assumption The resulting feedback law is locally Lipschitz continuous
Reference graph
Works this paper leans on
-
[1]
A Survey of Motion Planning and Control Techniques for Self-Driving Urban V ehicles,
B. Paden, M. ˇCáp, S. Z. Y ong, D. Y ershov, and E. Frazzoli, “A Survey of Motion Planning and Control Techniques for Self-Driving Urban V ehicles,” IEEE Transactions on Intelligent V ehicles, vol. 1, no. 1, pp. 33–55, 2016
2016
-
[2]
Path followi ng using dynamic transverse feedback linearization for car-like ro bots,
A. Akhtar, C. Nielsen, and S. L. Waslander, “Path followi ng using dynamic transverse feedback linearization for car-like ro bots,” IEEE Transactions on Robotics , vol. 31, no. 2, pp. 269–279, April 2015. −2 0 2 1 ( s) An ular elocity DFL [7] DFL-QP −1 0 2 (m s2) Linear Acceleration DFL [7] DFL-QP −0.2 0.0 x (m s) Linear elocity DFL [7] DFL-QP .0 .2 x ( )...
2015
-
[3]
Output tracking for nonlinea r systems with singular points,
R. Hirschorn and J. Davis, “Output tracking for nonlinea r systems with singular points,” SIAM journal on control and optimization , vol. 25, no. 3, pp. 547–557, 1987
1987
-
[4]
Control of nonholo- nomic wheeled mobile robots by state feedback linearizatio n,
B. d’Andréa Novel, G. Campion, and G. Bastin, “Control of nonholo- nomic wheeled mobile robots by state feedback linearizatio n,” The International journal of robotics research , vol. 14, no. 6, pp. 543– 559, 1995
1995
-
[5]
Exponential stabilization of mobile robots with nonholonomic constraints,
C. C. De Wit and O. Sordalen, “Exponential stabilization of mobile robots with nonholonomic constraints,” in [1991] Proceedings of the 30th IEEE Conference on Decision and Control . IEEE, 1991, pp. 692–697
1991
-
[6]
Isidori, Nonlinear control systems: an introduction
A. Isidori, Nonlinear control systems: an introduction. Springer, 1985
1985
-
[7]
WMR control vi a dynamic feedback linearization: design, implementation, and expe rimental val- idation,
G. Oriolo, A. De Luca, and M. V endittelli, “WMR control vi a dynamic feedback linearization: design, implementation, and expe rimental val- idation,” IEEE Transactions on Control Systems Technology , vol. 10, no. 6, pp. 835–852, 2002
2002
-
[8]
N. Wang, A. Akhtar, and R. G. Sanfelice, “A safe hybrid control framework for car-like robot with guaranteed globa l path- invariance using a control barrier function,” 2025. [Onlin e]. Available: https://arxiv.org/abs/2502.07136
-
[9]
Control of chained systems application to pa th following and time-varying point-stabilization of mobile robots,
C. Samson, “Control of chained systems application to pa th following and time-varying point-stabilization of mobile robots,” IEEE transac- tions on Automatic Control , vol. 40, no. 1, pp. 64–77, 2002
2002
-
[10]
Tracking-error model-based predictiv e control for mobile robots in real time,
G. Klan ˇcar and I. Škrjanc, “Tracking-error model-based predictiv e control for mobile robots in real time,” Robotics and autonomous systems, vol. 55, no. 6, pp. 460–469, 2007
2007
-
[11]
Discontinuous control of nonholonomic sys tems,
A. Astolfi, “Discontinuous control of nonholonomic sys tems,” Systems & control letters , vol. 27, no. 1, pp. 37–45, 1996
1996
-
[12]
Switching through singular ities,
C. Tomlin and S. S. Sastry, “Switching through singular ities,” Systems & control letters , vol. 35, no. 3, pp. 145–154, 1998
1998
-
[13]
Control barrier functions: Theory and appl ications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sre enath, and P . Tabuada, “Control barrier functions: Theory and appl ications,” in European control conference (ECC) . IEEE, 2019, pp. 3420–3431
2019
-
[14]
J. F. Bonnans and A. Shapiro, Perturbation analysis of optimization problems. Springer Science & Business Media, 2013
2013
-
[15]
Asymptotic stability and feedback stabilization,
R. W. Brockett et al., “Asymptotic stability and feedback stabilization,” Differential geometric control theory , vol. 27, no. 1, pp. 181–191, 1983
1983
-
[16]
Simultaneous Sta biliza- tion and Tracking of Nonholonomic Mobile Robots: A Lyapunov - Based Approach,
Y . Wang, Z. Miao, H. Zhong, and Q. Pan, “Simultaneous Sta biliza- tion and Tracking of Nonholonomic Mobile Robots: A Lyapunov - Based Approach,” IEEE Transactions on Control Systems Technology , vol. 23, no. 4, pp. 1440–1450, 2015
2015
-
[17]
H. K. Khalil, Nonlinear systems . Prentice hall Upper Saddle River, NJ, 2002, vol. 3
2002
-
[18]
S. P . Boyd and L. V andenberghe, Convex optimization. Cambridge university press, 2004
2004
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.