An LLM-based Two-Stage Transformer Framework for Cross-Domain Bearing Fault Diagnosis with Limited Data
Pith reviewed 2026-06-26 01:01 UTC · model grok-4.3
The pith
A two-stage Transformer uses pre-trained weights and fault prototypes to diagnose bearing faults across domains with only 10 percent labeled target data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
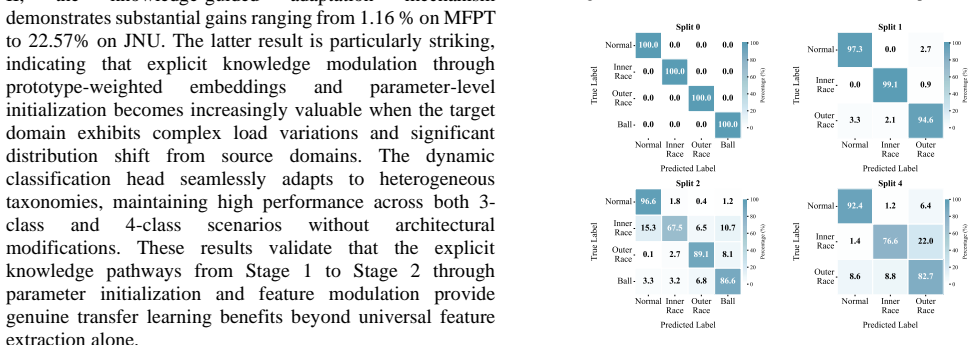
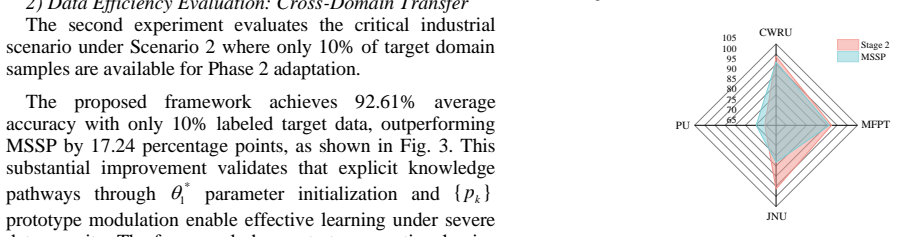
The framework addresses dual-shift challenges by using pre-trained encoder weights and fault prototype embeddings as explicit knowledge carriers from multi-source learning to target adaptation, combined with taxonomy-adaptive classification for transfer across heterogeneous fault categories, yielding 92.61 percent average accuracy on four real-world datasets with only 10 percent labeled target data and outperforming state-of-the-art methods by 17.24 percentage points.
What carries the argument
The knowledge-guided two-stage transfer learning framework, where a GPT-2-style Transformer encoder and fault prototype embeddings act as explicit knowledge carriers from multi-source pre-training to target adaptation.
If this is right
- Multi-source learning produces generalizable representations that support adaptation under concurrent operating condition changes.
- Prototype-based modulation allows target adaptation without requiring large amounts of labeled data in the new domain.
- Taxonomy-adaptive classification permits transfer even when fault categories are not identical between sources and target.
- The resulting accuracy level supports cost-effective predictive maintenance applications where labeled data collection is expensive.
Where Pith is reading between the lines
- The explicit carrier approach might extend to other sensor-based diagnostics such as gearbox or pump fault detection.
- Factories with limited labeling resources could adopt the method to reduce downtime without extensive new data collection.
- The separation of knowledge carriers from implicit feature alignment could improve troubleshooting when performance drops on a new machine.
Load-bearing premise
Pre-trained encoder weights from a GPT-2-style Transformer combined with fault prototype embeddings can serve as effective explicit knowledge carriers that enable transfer across heterogeneous fault categories and dataset shifts without the alignment failures of prior implicit methods.
What would settle it
Experiments on the four datasets showing accuracy falling below 80 percent or failing to outperform baselines when source and target fault categories differ substantially would falsify the claim that the explicit carriers enable seamless transfer.
Figures
read the original abstract
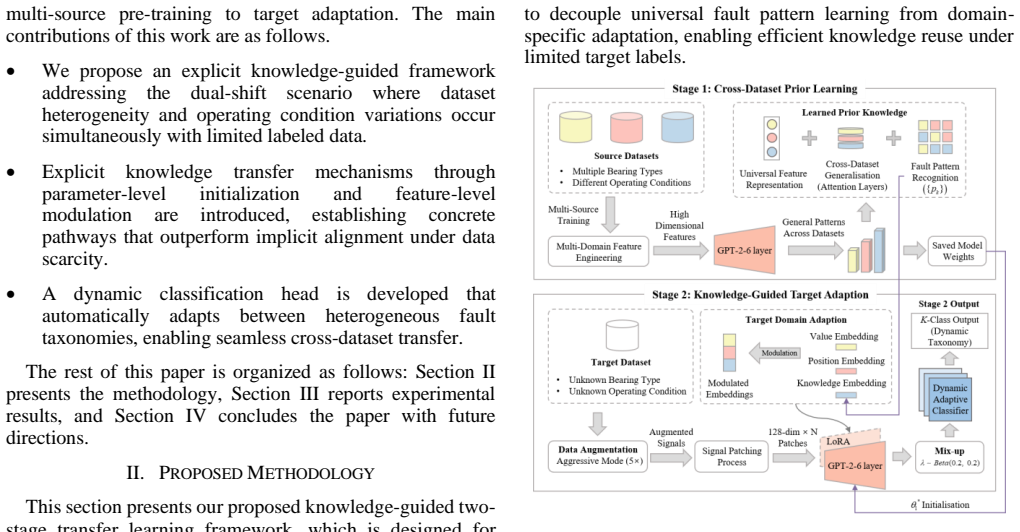
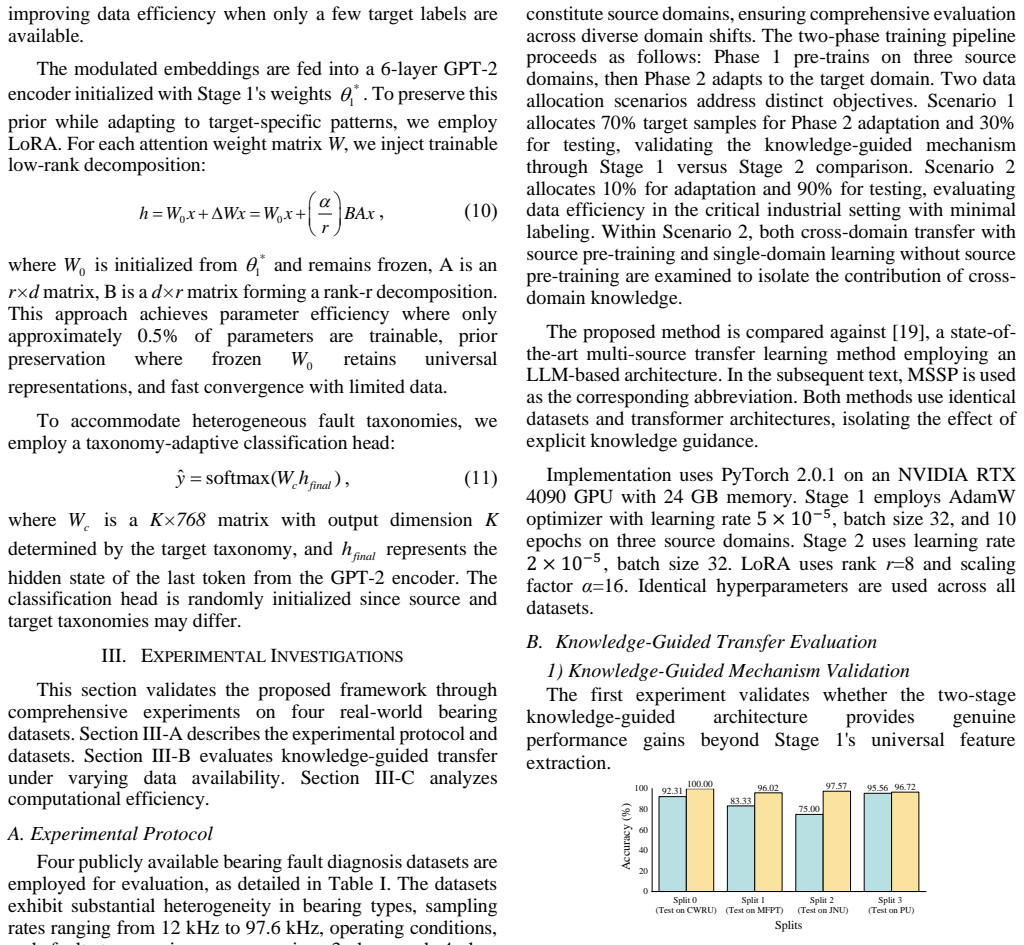
Bearing fault diagnosis faces critical challenges when dataset heterogeneity, operating condition variations, and limited labeled data occur simultaneously in industrial environments. Existing approaches address these issues in isolation and rely on implicit feature alignment, limiting effectiveness under concurrent challenges. This paper proposes a knowledge-guided two-stage transfer learning framework that employs a lightweight GPT-2-style Transformer with causal self-attention for hierarchical feature extraction from vibration signals, establishing explicit pathways where pre-trained encoder weights and fault prototype embeddings serve as knowledge carriers from multi-source pre-training to target adaptation. The framework addresses the dual-shift challenge through multi-source learning for generalizable representations, prototype-based knowledge modulation for target adaptation, and taxonomy-adaptive classification for seamless transfer across heterogeneous fault categories. Experimental validation on four real-world datasets demonstrates 92.61% average accuracy with only 10% labeled target data, outperforming state-of-the-art methods by 17.24 percentage points, establishing a practical pathway toward cost-effective predictive maintenance in Industry 4.0 applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a knowledge-guided two-stage transfer learning framework for cross-domain bearing fault diagnosis with limited labeled data. It employs a lightweight GPT-2-style Transformer with causal self-attention for hierarchical feature extraction from vibration signals, using pre-trained encoder weights and fault prototype embeddings as explicit knowledge carriers. The framework incorporates multi-source learning, prototype-based knowledge modulation, and taxonomy-adaptive classification to handle dataset heterogeneity and operating condition variations. Experimental validation on four real-world datasets reports 92.61% average accuracy with only 10% labeled target data, outperforming state-of-the-art methods by 17.24 percentage points.
Significance. If the experimental results hold and the contributions of the pre-trained weights and prototype embeddings can be isolated, the work offers a practical pathway for cost-effective predictive maintenance in Industry 4.0 by addressing concurrent challenges of limited labels and domain shifts through explicit knowledge transfer rather than implicit alignment. The approach of adapting LLM-style pre-training to vibration signals is a potentially useful direction, though its effectiveness requires direct verification.
major comments (2)
- [Abstract] Abstract: The central empirical claims of 92.61% average accuracy and a 17.24 percentage point improvement are load-bearing for the paper's contribution, yet the abstract (and by extension the presented validation summary) supplies no information on experimental protocol, baseline implementations, data splits, number of runs, or statistical tests. This prevents evaluation of whether the reported gains support the framework's effectiveness.
- [Experimental validation] The manuscript positions pre-trained GPT-2-style encoder weights combined with fault prototype embeddings as explicit knowledge carriers enabling transfer across heterogeneous fault categories and dataset shifts. However, no ablation evidence is provided to isolate the contribution of these components (e.g., pre-trained weights vs. random initialization, or prototype modulation vs. standard fine-tuning), making it impossible to attribute the accuracy gains to the claimed mechanism rather than other factors.
Simulated Author's Rebuttal
We are grateful to the referee for the insightful comments. Below we provide point-by-point responses to the major comments and describe the revisions to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central empirical claims of 92.61% average accuracy and a 17.24 percentage point improvement are load-bearing for the paper's contribution, yet the abstract (and by extension the presented validation summary) supplies no information on experimental protocol, baseline implementations, data splits, number of runs, or statistical tests. This prevents evaluation of whether the reported gains support the framework's effectiveness.
Authors: We acknowledge that the abstract does not detail the experimental protocol. The full details on baseline implementations, data splits, number of runs (reported as mean and standard deviation over multiple runs), and statistical tests are provided in the Experimental section of the manuscript. To address this concern, we will revise the abstract to include a short statement on the evaluation setup and refer to the detailed protocol in the body of the paper. revision: yes
-
Referee: [Experimental validation] The manuscript positions pre-trained GPT-2-style encoder weights combined with fault prototype embeddings as explicit knowledge carriers enabling transfer across heterogeneous fault categories and dataset shifts. However, no ablation evidence is provided to isolate the contribution of these components (e.g., pre-trained weights vs. random initialization, or prototype modulation vs. standard fine-tuning), making it impossible to attribute the accuracy gains to the claimed mechanism rather than other factors.
Authors: We agree that isolating the contributions of the pre-trained weights and prototype embeddings through ablations would strengthen the attribution of gains to the proposed mechanisms. The current manuscript relies on comparisons with state-of-the-art methods, but we will incorporate additional ablation studies in the revised version, including variants with random initialization and without prototype-based modulation, to directly demonstrate their impact. revision: yes
Circularity Check
No circularity; empirical results from external datasets
full rationale
The paper describes a proposed two-stage Transformer framework and reports empirical accuracies (92.61% average) from experiments on four real-world datasets with 10% labeled target data. No equations, derivations, fitted parameters renamed as predictions, or self-citation chains appear in the abstract or described structure. Results are presented as experimental outcomes rather than quantities forced by construction from inputs. The central claim rests on empirical validation, which is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A Survey on Fault Diagnosis of Rolling Bearings,
B. Peng, Y. Bi, B. Xue, M. Zhang, and S. Wan, “A Survey on Fault Diagnosis of Rolling Bearings,” Algorithms, vol. 15, no. 10, p. 347, Oct. 2022, doi: 10.3390/a15100347
-
[2]
Digital Twins-based prognostic and health management processes for rotating machinery: a review,
J. Wang, G. Peng, W. Zhang, W. Wu, S. Li, and Z. Chen, “Digital Twins-based prognostic and health management processes for rotating machinery: a review,” Structural Health Monitoring, p. 14759217251368750, Sep. 2025, doi: 10.1177/14759217251368750
-
[3]
H. Su, X. Yang, L. Xiang, A. Hu, and Y. Xu, “A novel method based on deep transfer unsupervised learning network for bearing fault diagnosis under variable working condition of unequal quantity,” Knowledge-Based Systems, vol. 242, p. 108381, Apr. 2022, doi: 10.1016/j.knosys.2022.108381
-
[4]
L. Wang and W. Zhao, “An ensemble deep learning network based on 2D convolutional neural network and 1D LSTM with self-attention for bearing fault diagnosis,” Applied Soft Computing, vol. 172, p. 112889, Mar. 2025, doi: 10.1016/j.asoc.2025.112889
-
[5]
J. Prawin, “Deep learning neural networks with input processing for vibration-based bearing fault diagnosis under imbalanced data conditions,” Structural Health Monitoring, vol. 24, no. 2, pp. 883– 908, Mar. 2025, doi: 10.1177/14759217241246508
-
[6]
CNN- Based Rolling Bearing Fault Diagnosis Method With Quantifiable Interpretability,
K. Jiang, Z. Yang, T. Jin, C. Chen, Z. Liu, and B. Zhang, “CNN- Based Rolling Bearing Fault Diagnosis Method With Quantifiable Interpretability,” IEEE Transactions on Instrumentation and Measurement, vol. 74, pp. 1–12, 2025, doi: 10.1109/TIM.2025.3551952
-
[7]
Y.-Q. Wang and Y.-P. Zhao, “Dual Attention Smoothing Adaptation Networks for Aeroengine Multisource Cross-Domain Fault Diagnosis under Category Shift,” Journal of Aerospace Engineering, vol. 38, no. 4, p. 04025035, Jul. 2025, doi: 10.1061/JAEEEZ.ASENG-5633
-
[8]
C. Lin et al., “IF-EDAAN: An information fusion-enhanced domain adaptation attention network for unsupervised transfer fault diagnosis,” Mechanical Systems and Signal Processing, vol. 224, p. 112180, Feb. 2025, doi: 10.1016/j.ymssp.2024.112180
-
[9]
A comprehensive survey on domain adaptation for intelligent fault diagnosis,
C. Wang, Z. Wang, Q. Liu, H. Dong, W. Liu, and X. Liu, “A comprehensive survey on domain adaptation for intelligent fault diagnosis,” Knowledge-Based Systems, vol. 327, p. 114109, Oct. 2025, doi: 10.1016/j.knosys.2025.114109
-
[10]
Digital Twin Enabled Domain Adversarial Graph Networks for Bearing Fault Diagnosis,
K. Feng et al., “Digital Twin Enabled Domain Adversarial Graph Networks for Bearing Fault Diagnosis,” IEEE Transactions on Industrial Cyber-Physical Systems, vol. 1, pp. 113–122, 2023, doi: 10.1109/TICPS.2023.3298879
-
[11]
X. Li, G. Zhu, A. Hu, L. Xing, and L. Xiang, “A meta-learning method based on meta-feature enhancement for bearing fault identification under few-sample conditions,” Mechanical Systems and Signal Processing, vol. 226, p. 112370, Mar. 2025, doi: 10.1016/j.ymssp.2025.112370
-
[12]
X. Xu, X. Ou, L. Ge, Z. Qiao, and P. Shi, “Simulated Data-Assisted Fault Diagnosis Framework With Dual-Path Feature Fusion for Rolling Element Bearings Under Incomplete Data,” IEEE Transactions on Instrumentation and Measurement, vol. 74, pp. 1–17, 2025, doi: 10.1109/TIM.2025.3573353
-
[13]
A modified domain adversarial approach based on model and data-driven for bearing fault diagnosis,
N. Zhang, Z. Qiao, B. Guo, F. Wu, and J. Fan, “A modified domain adversarial approach based on model and data-driven for bearing fault diagnosis,” Expert Systems with Applications, vol. 296, p. 128970, Jan. 2026, doi: 10.1016/j.eswa.2025.128970
-
[14]
X. Chen et al., “Large Models for Machine Monitoring and Fault Diagnostics: Opportunities, Challenges, and Future Direction,” Journal of Dynamics, Monitoring and Diagnostics, vol. 4, no. 2, pp. 76–90, Jun. 2025, doi: 10.37965/jdmd.2025.832
-
[15]
S. Zheng, K. Pan, J. Liu, and Y. Chen, “Empirical study on fine- tuning pre-trained large language models for fault diagnosis of complex systems,” Reliability Engineering & System Safety, vol. 252, p. 110382, Dec. 2024, doi: 10.1016/j.ress.2024.110382
-
[16]
C. Men, Y. Han, P. Wang, J. Tao, and C.-G. Huang, “The Interpretable Reasoning and Intelligent Decision-Making Based on Event Knowledge Graph With LLMs in Fault Diagnosis Scenarios,” IEEE Transactions on Instrumentation and Measurement, vol. 74, pp. 1–16, 2025, doi: 10.1109/TIM.2025.3550999
-
[17]
Z. Pang, Y. Luan, J. Chen, and T. Li, “ParInfoGPT: An LLM-based two-stage framework for reliability assessment of rotating machine under partial information,” Reliability Engineering & System Safety, vol. 250, p. 110312, Oct. 2024, doi: 10.1016/j.ress.2024.110312
-
[18]
T. Wang, P. Wang, F. Yang, S. Wang, Q. Fang, and M. Chi, “Multi large language model collaboration framework for few-shot link prediction in evolutionary fault diagnosis event graphs,” Journal of Process Control, vol. 145, p. 103342, Jan. 2025, doi: 10.1016/j.jprocont.2024.103342
-
[19]
LLM-based fra ework for earing fault diagnosis,
L. Tao, H. Liu, G. Ning, W. Cao, B. Huang, and C. Lu, “LLM-based framework for bearing fault diagnosis,” Mechanical Systems and Signal Processing, vol. 224, p. 112127, Feb. 2025, doi: 10.1016/j.ymssp.2024.112127
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.