When Multi-Robot Systems Meet Agentic AI:Towards Embodied Collective Intelligence
Pith reviewed 2026-06-29 04:27 UTC · model grok-4.3
The pith
Robot teams can accumulate and share world context, task progress, and skill experience as embodied collective intelligence.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
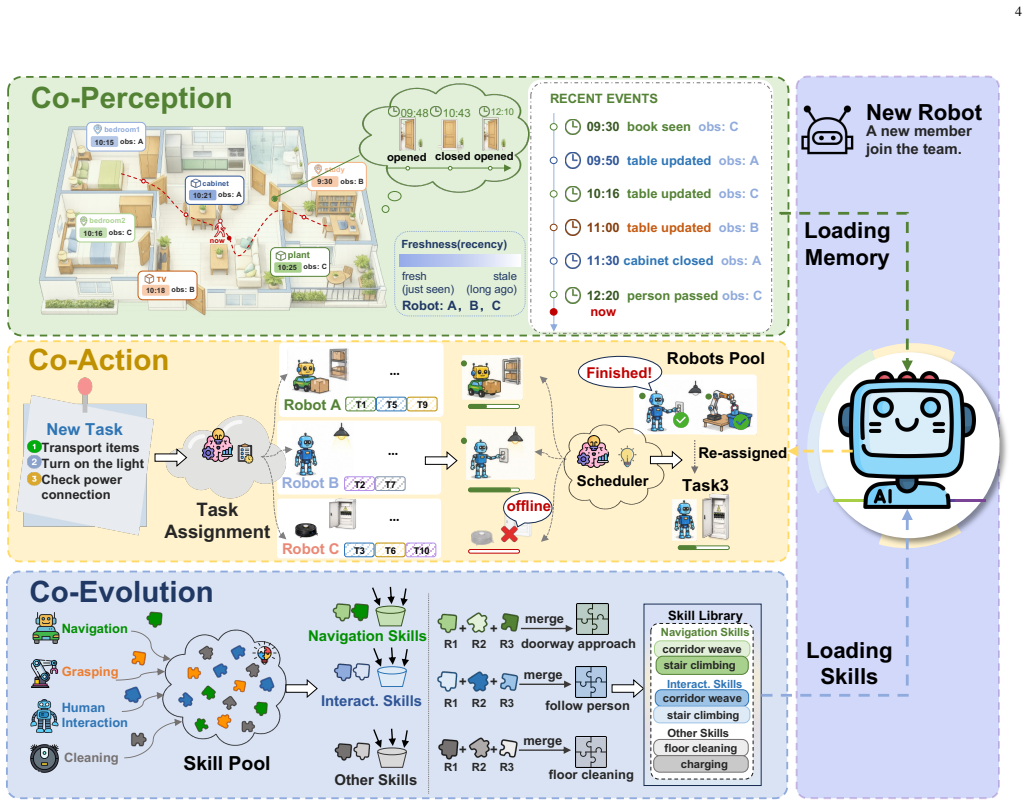
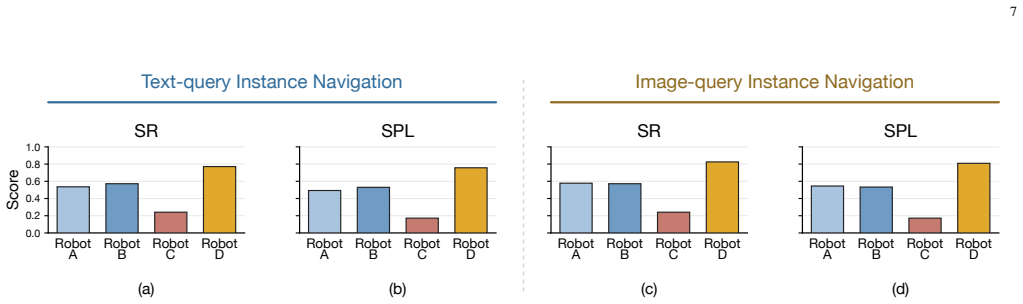
Embodied Collective Intelligence is a multi-robot paradigm in which a robot team accumulates and uses world context, task progress, and skill experience as shared resources through Co-Perception, Co-Action, and Co-Evolution. The concept is supported by a review of agentic embodied AI and multi-robot cooperation trends, and grounded by a navigation study showing that a newly added robot benefits from merged team memory.
What carries the argument
Embodied Collective Intelligence realized through Co-Perception, Co-Action, and Co-Evolution, illustrated by shared world-memory inheritance.
If this is right
- A new robot added to a team can inherit accumulated world context and task progress without starting from scratch.
- Coordinated perception and action enable distributed sensing and execution that exceeds single-robot limits.
- Co-Evolution allows the team to refine collective skills across successive tasks and members.
- The paradigm supports greater fault tolerance by maintaining shared experience even if individual robots fail.
Where Pith is reading between the lines
- The same memory-merging approach could be tested in physical robot fleets to measure real-world latency and consistency costs.
- Integration with existing multi-robot planning algorithms might reveal whether the added shared state improves or conflicts with current assignment methods.
- Scaling the concept to large teams could connect to questions of how collective memory should be compressed or prioritized.
Load-bearing premise
That sharing the states produced by embodied agent loops will yield collective benefits beyond those from sharing maps, task assignments, and datasets.
What would settle it
A controlled navigation experiment in which a new robot using only traditional map and task sharing matches or exceeds the adaptation speed of one using merged team memory from prior embodied loops.
Figures
read the original abstract
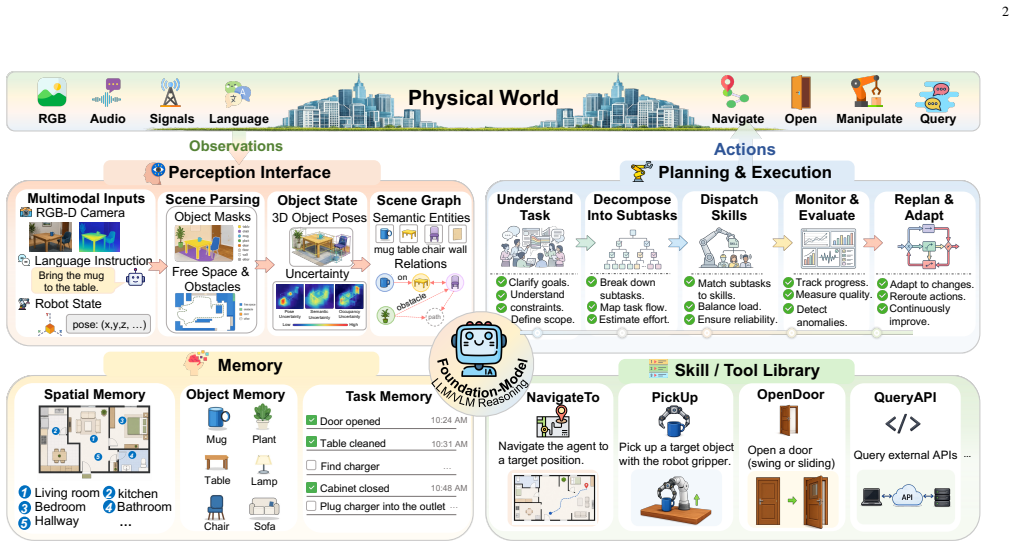
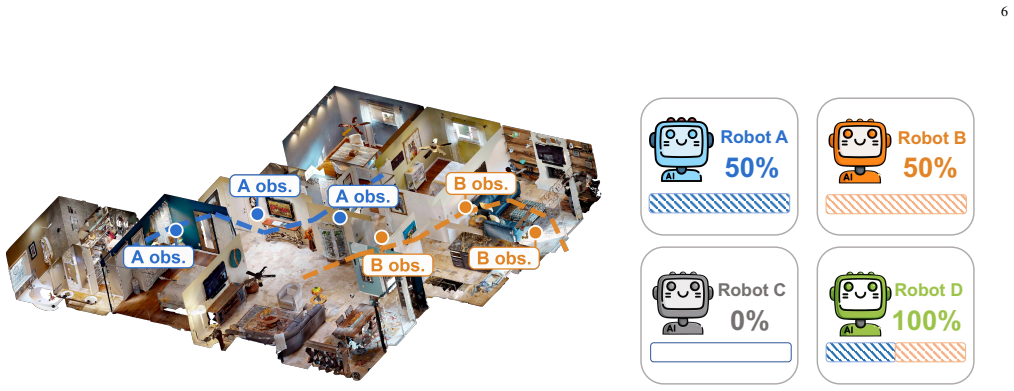
Embodied AI is increasingly becoming agentic, shifting robots from perception--control pipelines towards closed-loop systems that can retrieve context, deliberate during execution, monitor feedback, and refine future behavior. In parallel, robotics research has also moved from single-robot autonomy towards multi-robot systems, driven by the need for wider sensing, distributed action, heterogeneous capabilities, and fault tolerance. As AI agents move from single-agent use towards multi-agent collaboration, robotics faces a parallel challenge: robot teams must move beyond sharing maps, task assignments, and datasets towards sharing the state produced by embodied agent loops. This article explores Embodied Collective Intelligence (ECI), a future multi-robot paradigm in which a robot team accumulates and uses world context, task progress, and skill experience as shared resources. Specifically, we first review how embodied AI is becoming agentic and how multi-robot cooperation has evolved. We then present Embodied Collective Intelligence through Co-Perception, Co-Action, and Co-Evolution. Finally, we use an illustrative navigation study to examine one concrete component of the concept: shared world-memory inheritance. The study shows that a newly added robot can benefit from merged team memory, but it is not intended as a full evaluation of the ECI framework. Taken together, the review and conceptual framework motivate Embodied Collective Intelligence as a direction for embodied multi-agent intelligence, while the case study grounds one measurable part of the concept.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Embodied Collective Intelligence (ECI) as a future paradigm for multi-robot systems in which robot teams accumulate and share world context, task progress, and skill experience produced by embodied agent loops. It reviews the shift toward agentic embodied AI and the evolution of multi-robot cooperation, introduces the framework through Co-Perception, Co-Action, and Co-Evolution, and presents an illustrative navigation study on shared world-memory inheritance showing that a new robot can benefit from merged team memory (explicitly not a full evaluation).
Significance. If the proposed distinctions can be formalized and shown to yield measurable collective benefits beyond existing multi-robot coordination, the framework could usefully direct research toward collective embodied intelligence. The review of trends provides a helpful synthesis, but the conceptual nature and illustrative-only case study limit immediate impact to motivating a research direction rather than establishing a new operational paradigm.
major comments (2)
- [Sections introducing Co-Perception, Co-Action, and Co-Evolution] The central claim requires that sharing states from closed-loop agentic processes yields benefits beyond current multi-robot methods, yet the manuscript provides no formal definition or ontology of these states, nor any comparison showing what additional variables or update semantics they contain relative to distributed POMDPs, shared belief states, or cooperative SLAM. This distinction is load-bearing for the novelty of ECI.
- [Illustrative navigation study] The navigation case study demonstrates benefit from merged memory but supplies no rigorous data, error bars, controlled baselines, or isolation of agent-loop-specific elements versus standard map merging, consistent with the authors' statement that it is not intended as a full evaluation. This leaves the framework without concrete empirical grounding for its core claims.
minor comments (1)
- Notation for the three Co- mechanisms could be clarified with explicit definitions or pseudocode to aid reproducibility of the conceptual elements.
Simulated Author's Rebuttal
We thank the referee for the constructive review, which correctly identifies the conceptual scope and limitations of the work. We address each major comment below, clarifying the paper's intent as a position piece to motivate research directions rather than a fully formalized or empirically validated paradigm.
read point-by-point responses
-
Referee: [Sections introducing Co-Perception, Co-Action, and Co-Evolution] The central claim requires that sharing states from closed-loop agentic processes yields benefits beyond current multi-robot methods, yet the manuscript provides no formal definition or ontology of these states, nor any comparison showing what additional variables or update semantics they contain relative to distributed POMDPs, shared belief states, or cooperative SLAM. This distinction is load-bearing for the novelty of ECI.
Authors: We agree that the manuscript does not supply formal definitions, ontologies, or explicit comparisons to frameworks such as distributed POMDPs, shared belief states, or cooperative SLAM. The paper is framed as a conceptual synthesis and review to introduce Embodied Collective Intelligence as a research direction, not as a complete theoretical development. We will revise the relevant sections to add a concise discussion relating the shared states in Co-Perception, Co-Action, and Co-Evolution to existing multi-robot coordination methods, highlighting intended distinctions at a high level. A full ontology and quantitative comparison would require a separate technical paper. revision: yes
-
Referee: [Illustrative navigation study] The navigation case study demonstrates benefit from merged memory but supplies no rigorous data, error bars, controlled baselines, or isolation of agent-loop-specific elements versus standard map merging, consistent with the authors' statement that it is not intended as a full evaluation. This leaves the framework without concrete empirical grounding for its core claims.
Authors: The manuscript already states explicitly that the navigation study is illustrative only and not intended as a full evaluation. We acknowledge that it lacks rigorous statistical analysis, controlled baselines, or isolation of agentic elements from standard map merging, and therefore does not provide strong empirical grounding for the broader ECI claims. The study's role is limited to concretely demonstrating one component (shared world-memory inheritance). We will not expand it into a full evaluation, as doing so would alter the paper from a conceptual position piece to an empirical study. revision: no
Circularity Check
No circularity: purely conceptual framework with no derivations or fitted inputs
full rationale
The manuscript is a review plus forward-looking conceptual proposal for Embodied Collective Intelligence (ECI) via Co-Perception, Co-Action, and Co-Evolution. It contains no equations, no parameter fitting, no uniqueness theorems, and no load-bearing self-citations. The navigation case study is explicitly labeled as illustrative and not a full evaluation. All central claims are definitional or motivational rather than derived from prior results by the same authors; the argument is self-contained as a direction-setting paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Robot teams must move beyond sharing maps, task assignments, and datasets toward sharing the state produced by embodied agent loops
invented entities (4)
-
Embodied Collective Intelligence
no independent evidence
-
Co-Perception
no independent evidence
-
Co-Action
no independent evidence
-
Co-Evolution
no independent evidence
Reference graph
Works this paper leans on
-
[1]
BUMBLE: Unifying reasoning and acting with vision-language models for building-wide mobile manipulation,
R. Shah, A. Yu, Y . Zhuet al., “BUMBLE: Unifying reasoning and acting with vision-language models for building-wide mobile manipulation,” in Proc. IEEE Int. Conf. Robot. Autom. (ICRA), 2025
2025
-
[2]
Do as I can, not as I say: Grounding language in robotic affordances,
M. Ahn, A. Brohan, N. Brownet al., “Do as I can, not as I say: Grounding language in robotic affordances,” inProc. Conf. Robot Learn. (CoRL), 2022
2022
-
[3]
Semantic mapping in indoor embodied AI: A survey on advances, challenges, and future directions,
S. Raychaudhuri and A. X. Chang, “Semantic mapping in indoor embodied AI: A survey on advances, challenges, and future directions,” Trans. Mach. Learn. Res. (TMLR), 2025, arXiv:2501.05750
-
[4]
ConceptGraphs: Open-vocabulary 3D scene graphs for perception and planning,
Q. Gu, A. Kuwajerwala, S. Morin, K. M. Jatavallabhula, B. Sen, A. Agarwalet al., “ConceptGraphs: Open-vocabulary 3D scene graphs for perception and planning,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2024, pp. 5021–5028
2024
-
[5]
Dynamem: Online dynamic spatio-semantic memory for open world mobile manipulation,
P. Liu, Z. Guo, M. Warke, S. Chintala, C. Paxton, N. M. M. Shafiullah, and L. Pinto, “Dynamem: Online dynamic spatio-semantic memory for open world mobile manipulation,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2025, pp. 13 346–13 355
2025
-
[6]
Open X-embodiment: Robotic learning datasets and RT-X models,
Open X-Embodiment Collaboration, “Open X-embodiment: Robotic learning datasets and RT-X models,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2024, pp. 6892–6903
2024
-
[7]
REFLECT: Summarizing robot experiences for failure explanation and correction,
Z. Liu, A. Bahety, and S. Song, “REFLECT: Summarizing robot experiences for failure explanation and correction,” inProc. Conf. Robot Learn. (CoRL), 2023, arXiv:2306.15724
-
[8]
EmbodiSkill: Skill-Aware Reflection for Self-Evolving Embodied Agents
R. Ju, X. Wang, X. Dinget al., “EmbodiSkill: Skill-aware reflection for self-evolving embodied agents,”arXiv preprint arXiv:2605.10332, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[9]
Consensus-based decentralized auctions for robust task allocation,
H.-L. Choi, L. Brunet, and J. P. How, “Consensus-based decentralized auctions for robust task allocation,”IEEE Trans. Robot., vol. 25, no. 4, pp. 912–926, 2009
2009
-
[10]
Kimera-multi: Robust, distributed, dense metric-semantic SLAM for multi-robot systems,
Y . Tian, Y . Chang, F. Herrera Arias, C. Nieto-Granda, J. P. How, and L. Carlone, “Kimera-multi: Robust, distributed, dense metric-semantic SLAM for multi-robot systems,”IEEE Trans. Robot., vol. 38, no. 4, pp. 2022–2038, 2022
2022
-
[11]
RoboEarth: A world wide web for robots,
M. Waibel, M. Beetz, J. Civera, R. D’Andrea, J. Elfring, D. Gálvez- Lópezet al., “RoboEarth: A world wide web for robots,”IEEE Robot. Autom. Mag., vol. 18, no. 2, pp. 69–82, 2011
2011
-
[12]
EMOS: Embodiment- aware heterogeneous multi-robot operating system with LLM agents,
J. Chen, C. Yu, X. Zhou, T. Xu, Y . Muet al., “EMOS: Embodiment- aware heterogeneous multi-robot operating system with LLM agents,” inInt. Conf. Learn. Represent. (ICLR), 2025, arXiv:2410.22662
-
[13]
H. Tanet al., “RoboOS-NeXT: A unified memory-based framework for lifelong, scalable, and robust multi-robot collaboration,”arXiv preprint arXiv:2510.26536, 2025
-
[14]
Habitat-Matterport 3D Dataset (HM3D): 1000 Large-scale 3D Environments for Embodied AI
S. K. Ramakrishnan, A. Gokaslan, E. Wijmans, O. Maksymets, A. Clegg, J. Turneret al., “Habitat-matterport 3D dataset (HM3D): 1000 large-scale 3D environments for embodied AI,” inProc. NeurIPS Datasets and Benchmarks Track, 2021, arXiv:2109.08238
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[15]
On Evaluation of Embodied Navigation Agents
P. Anderson, A. Chang, D. S. Chaplot, A. Dosovitskiy, S. Gupta, V . Koltunet al., “On evaluation of embodied navigation agents,”arXiv preprint arXiv:1807.06757, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.