Evolutionary Hyperparameter Optimization to Find Lightweight CNN Models for Autonomous Steering
Pith reviewed 2026-06-30 04:30 UTC · model grok-4.3
The pith
An evolution strategy tunes CNN hyperparameters to produce much smaller models that still predict steering angles competitively.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The (N+M) Evolution Strategy with the 1/5th success rule automates hyperparameter tuning of CNNs and DNNs so that the resulting models are significantly smaller than the baseline yet retain competitive predictive accuracy for steering angles on the authors' small driving-image dataset.
What carries the argument
(N+M) Evolution Strategy with the 1/5th success rule, which dynamically adjusts filter sizes, layer configurations, and other CNN hyperparameters during the search for lightweight architectures.
If this is right
- Lightweight CNNs obtained this way can run at higher frame rates on vehicle-grade processors.
- Automated evolutionary tuning removes the need for extensive manual architecture search in steering tasks.
- The same search procedure can be repeated on other small labeled driving datasets to produce task-specific compact models.
- The resulting models support cost-effective deployment because they require fewer parameters and less memory.
Where Pith is reading between the lines
- If the evolutionary search is repeated with additional sensor channels such as depth or IMU data, the same size-reduction benefit may appear.
- The method's success on one platform suggests it could be tested as a drop-in replacement for hand-designed CNNs in other low-data robotic control problems.
- A direct comparison against gradient-based neural-architecture-search methods on the same steering dataset would clarify whether the evolutionary approach offers unique advantages in this domain.
Load-bearing premise
The very small pre-processed dataset of images from limited driving scenarios is large and representative enough for the evolutionary search to discover hyperparameter settings that generalize to new paths and mimic human steering.
What would settle it
Train the final lightweight model on the reported dataset, then measure its mean absolute steering-angle error on a fresh collection of images recorded on different paths, times of day, or weather; if the error rises substantially above the baseline, the claim does not hold.
Figures

read the original abstract
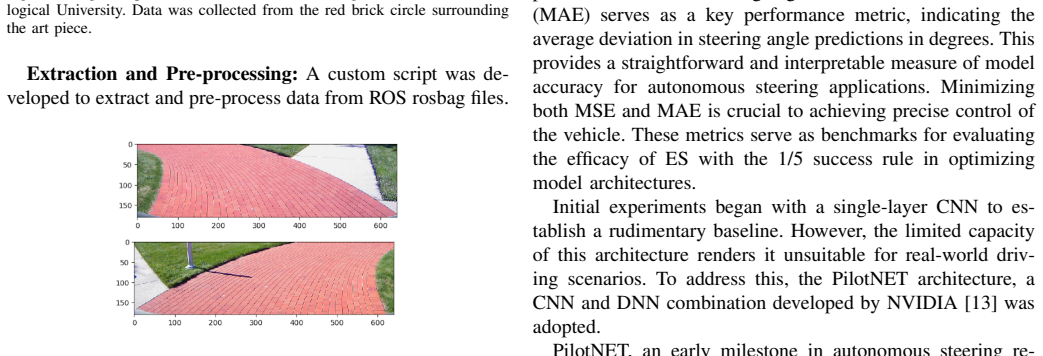
This research investigates the optimization of Convolutional and Dense Neural Networks (CNNs and DNNs) for autonomous steering using the (N+M) Evolution Strategy (ES) with the 1/5th success rule. The primary objective is to develop a lightweight CNN based model capable of real-time steering angle prediction, mimicking human driving behavior on predefined paths. The ES algorithm automates hyperparameter tuning, dynamically adjusting parameters such as filter sizes and layer configurations. Data collection encompasses driving scenarios recorded via the LTU ACTor autonomous driving platform, including variations in path direction and driving style. The very small dataset consists of timestamped images labeled with steering angles and pre-processed to focus on relevant visual information. Initial experiments involve training a baseline CNN model, which is then refined using ES to significantly reduce the size of the model while maintaining competitive predictive accuracy. The results highlight the viability of lightweight neural network architectures for real-time autonomous systems, striking a balance between computational efficiency and performance. This study not only advances research initiatives on the use of evolutionary algorithms for autonomous driving applications but also lays the foundation for the deployment of cost-effective and scalable solutions in self-driving technology.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper applies the (N+M) Evolution Strategy with the 1/5th success rule to automate hyperparameter tuning (filter sizes, layer configurations) of CNN/DNN models for steering-angle prediction. It collects a very small dataset of timestamped images from the LTU ACTor platform, trains a baseline CNN, then uses ES to produce a significantly smaller model claimed to retain competitive accuracy while mimicking human driving behavior on predefined paths.
Significance. If the quantitative claims hold under proper validation, the work would provide a concrete demonstration that evolutionary strategies can discover compact CNN architectures suitable for real-time autonomous steering, contributing to the intersection of neuroevolution and resource-efficient robotics.
major comments (2)
- [Abstract] Abstract and results paragraphs: the central claim that ES refinement 'significantly reduce[s] the size of the model while maintaining competitive predictive accuracy' is stated without any reported metrics (MSE, MAE, accuracy, parameter counts), baseline numbers, or statistical comparisons; this absence makes the claim impossible to evaluate.
- [Data collection and results paragraphs] Data collection and results paragraphs: the generalization assumption—that evolutionary search on a 'very small dataset' of images from a single platform yields models that 'mimic human driving behavior' on real scenarios—is load-bearing yet unsupported; no held-out test set, cross-validation procedure, or external benchmark is described, leaving open the risk that the 1/5th-success-rule ES exploits platform-specific artifacts.
minor comments (2)
- [Abstract] The abstract refers to both CNNs and DNNs but the experimental description focuses exclusively on CNNs; clarify the scope.
- [Abstract] Notation for the (N+M) ES and the precise meaning of the 1/5th success rule should be defined at first use rather than assumed.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for explicit quantitative support and validation details. We agree these elements are essential for evaluating the claims and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract and results paragraphs: the central claim that ES refinement 'significantly reduce[s] the size of the model while maintaining competitive predictive accuracy' is stated without any reported metrics (MSE, MAE, accuracy, parameter counts), baseline numbers, or statistical comparisons; this absence makes the claim impossible to evaluate.
Authors: We acknowledge that the abstract and results paragraphs do not report specific numerical values. The full manuscript contains experimental outcomes, but to address this directly we will expand the abstract and results sections with baseline vs. optimized parameter counts, MSE/MAE values on the steering prediction task, and any available statistical comparisons in the revised version. revision: yes
-
Referee: [Data collection and results paragraphs] Data collection and results paragraphs: the generalization assumption—that evolutionary search on a 'very small dataset' of images from a single platform yields models that 'mimic human driving behavior' on real scenarios—is load-bearing yet unsupported; no held-out test set, cross-validation procedure, or external benchmark is described, leaving open the risk that the 1/5th-success-rule ES exploits platform-specific artifacts.
Authors: The manuscript explicitly describes the dataset as very small and collected from a single platform. We will revise the data collection and results sections to detail the exact train/validation/test split procedure (including any held-out set or cross-validation) and add a limitations discussion on potential platform-specific artifacts to better support the generalization claims. revision: yes
Circularity Check
Standard ES hyperparameter search on CNN steering model shows no circularity
full rationale
The paper describes an experimental workflow: collect a small image-steering dataset from the LTU ACTor platform, train a baseline CNN, then apply the (N+M) Evolution Strategy with the 1/5th success rule to search over filter sizes and layer counts while monitoring predictive accuracy. No derivation chain, equation, or self-citation is invoked to justify the performance claims; results are reported as direct empirical outcomes of the search. The method is a conventional application of evolutionary algorithms to hyperparameter tuning and does not reduce any claimed prediction to quantities defined by the fitted parameters themselves or to prior self-referential results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
End to End Learning for Self-Driving Cars
M. Bojarski, D. Del Testa, D. Dworakowski, B. Firner, B. Flepp, P. Goyal, L. D. Jackel, M. Monfort, U. Muller, J. Zhanget al., “End to end learning for self-driving cars,”arXiv preprint arXiv:1604.07316, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[2]
Real-time self- driving car navigation using deep neural network,
T.-D. Do, M.-T. Duong, Q.-V . Dang, and M.-H. Le, “Real-time self- driving car navigation using deep neural network,” in2018 4th Interna- tional Conference on Green Technology and Sustainable Development (GTSD), 2018
2018
-
[3]
MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
A. G. Howard, M. Zhu, B. Chen, D. Kalenichenko, W. Wang, T. Weyand, M. Andreetto, and H. Adam, “Mobilenets: Efficient convolutional neural networks for mobile vision applications,” 2017. [Online]. Available: https://arxiv.org/abs/1704.04861
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[4]
Imagenet: A large-scale hierarchical image database,
J. Deng, W. Dong, R. Socher, L.-J. Li, K. Li, and L. Fei-Fei, “Imagenet: A large-scale hierarchical image database,” in2009 IEEE Conference on Computer Vision and Pattern Recognition, 2009, pp. 248–255
2009
-
[5]
Prototypical networks for few-shot learning,
J. Snell, K. Swersky, and R. Zemel, “Prototypical networks for few-shot learning,” inAdvances in Neural Information Processing Systems, I. Guyon, U. V . Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan, and R. Garnett, Eds., vol. 30. Curran Associates, Inc., 2017. [Online]. Available: https://proceedings.neurips.cc/paper files/paper/2017/file/cb...
2017
-
[6]
Evolution strategies – a comprehensive introduction,
H.-G. Beyer and H.-P. Schwefel, “Evolution strategies – a comprehensive introduction,”Natural Computing: An International Journal, vol. 1, no. 1, p. 3–52, 2002. [Online]. Available: https://doi.org/10.1023/A:1015059928466
-
[7]
Evolution Strategies as a Scalable Alternative to Reinforcement Learning
T. Salimans, J. Ho, X. Chen, S. Sidor, and I. Sutskever, “Evolution strategies as a scalable alternative to reinforcement learning,” 2017. [Online]. Available: https://arxiv.org/abs/1703.03864
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[8]
Distilling the Knowledge in a Neural Network
G. Hinton, O. Vinyals, and J. Dean, “Distilling the knowledge in a neural network,” 2015. [Online]. Available: https://arxiv.org/abs/1503.02531
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[9]
Steering angle prediction via neural networks,
F. Faizi and A. Alsulaifanie, “Steering angle prediction via neural networks,”Indonesian Journal of Electrical Engineering and Computer Science, vol. 31, pp. 392–399, 07 2023
2023
-
[10]
End-to-end steering controller with cnn-based closed-loop feedback for autonomous vehicles,
J. Jhung, I. Bae, J. Moon, T. Kim, J. Kim, and S. Kim, “End-to-end steering controller with cnn-based closed-loop feedback for autonomous vehicles,” in2018 IEEE Intelligent Vehicles Symposium (IV), 2018, pp. 617–622
2018
-
[11]
Kocherovsky, G
M. Kocherovsky, G. DeRose, N. Paul, I. Timmis, and C.-J. Chung, Autonomous Vehicle Steering through Convolutional and Recurrent Deep Learning. River Publishers, 2023, autonomous Vehicles and Systems, eBook ISBN9781032629537
2023
-
[12]
Autonomously steering vehicles along unmarked roads using low-cost sensing and computational systems,
G. DeRose, A. Ramsey, J. Dombecki, N. Paul, and C.-J. Chung, “Autonomously steering vehicles along unmarked roads using low-cost sensing and computational systems,”Vehicles, vol. 5, no. 4, pp. 1400– 1422, 2023
2023
-
[13]
Explaining How a Deep Neural Network Trained with End-to-End Learning Steers a Car
M. Bojarski, P. Yeres, A. Choromanska, K. Choromanski, B. Firner, L. Jackel, and U. Muller, “Explaining how a deep neural network trained with end-to-end learning steers a car,”arXiv preprint arXiv:1704.07911, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[14]
Nn-svg: Publication-ready neural network architecture schematics,
A. LeNail, “Nn-svg: Publication-ready neural network architecture schematics,”Journal of Open Source Software, vol. 4, no. 33, p. 747,
-
[15]
Available: https://doi.org/10.21105/joss.00747
[Online]. Available: https://doi.org/10.21105/joss.00747
-
[16]
Ltu-self-drive-sim,
D. Butani and R. Kaddis, “Ltu-self-drive-sim,” 2025. [Online]. Available: https://github.com/Aeolus96/LTU-Self-Drive-Sim
2025
-
[17]
Vent, “Rechenberg, ingo, evolutionsstrategie — optimierung technischer systeme nach prinzipien der biologischen evolution
W. Vent, “Rechenberg, ingo, evolutionsstrategie — optimierung technischer systeme nach prinzipien der biologischen evolution. 170 s. mit 36 abb. frommann-holzboog-verlag. stuttgart 1973. broschiert,”Feddes Repertorium, vol. 86, no. 5, pp. 337–337,
1973
-
[18]
Available: https://onlinelibrary.wiley.com/doi/abs/10
[Online]. Available: https://onlinelibrary.wiley.com/doi/abs/10. 1002/fedr.19750860506
-
[19]
Chung,Knowledge-based approaches to self-adaptation in cultural algorithms
C.-J. Chung,Knowledge-based approaches to self-adaptation in cultural algorithms. Wayne State University, 1997, doctoral Thesis. 6
1997
-
[20]
Caep: An evolution-based tool for real-valued function optimization using cultural algorithms,
C.-J. Chung and R. G. Reynolds, “Caep: An evolution-based tool for real-valued function optimization using cultural algorithms,”Interna- tional Journal on Artificial Intelligence Tools, vol. 7, no. 03, pp. 239– 291, 1998
1998
-
[21]
Knowledge-based self-adaptation in evolutionary search,
C.-J. Chung and R. Reynolds, “Knowledge-based self-adaptation in evolutionary search,”International Journal of Pattern Recognition and Artificial Intelligence, vol. 14, no. 01, pp. 19–33, 2000
2000
-
[22]
Gazellesim,
G. DeRose, “Gazellesim,” 2025. [Online]. Available: https://github. com/gderose2/gazelle sim 7
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.